Изобретение относится к медицине, а именно, к способам подготовки и выполнения хирургических операций с использованием технологии смешанной реальности, а также применяемым при этом устройствам.
Изобретение может быть использовано, например, в реконструктивной хирургии при выполнении реконструктивно-пластических операций для устранения обширных костных дефектов и дефектов окружающих мягких тканей, возникших после удаления злокачественных и доброкачественных новообразований, в результате травм и деформаций различного генеза, а также для операций на мозге с целью увеличения точности и упрощения проведения операции.
Технология смешанной реальности (Mixed reality, MR) дает возможность наблюдателю видеть виртуальные объекты в контексте реального мира. Современный подход позволяет проецировать изображение этих объектов перед глазами пользователя в виде голограммы, используя для этого так называемые очки смешанной реальности. Это позволяет наблюдателю взаимодействовать в реальном времени между различными материальными и виртуальными объектами, как будто они существуют в единой среде. Используя эту особенность, можно повысить производительность и качество услуг во многих областях, в частности -хирургии.
В настоящее время опубликовано немало научных трудов по использованию технологии смешанной реальности в разных областях медицины: нейрохирургии, кардиологии, урологии, пластической хирургии и других.
Очевидно, что при использовании технологии MR стоит задача обеспечения точного позиционирования виртуальных объектов относительно реальных с точки зрения пользователя. Для решения этой задачи используется система оптического трекинга.
Трекинг с использованием специальных маркеров удобен тем, что они проще распознаются камерой и дают ей более жесткую привязку к месту для виртуальной модели. Такая технология гораздо надежнее «безмаркерной» и работает практически без сбоев.
Держатель маркеров (в дальнейшем - держатель или ДМ) занимает важное место в составе оборудования, необходимого для выполнения хирургических операций с использованием очков смешанной реальности (например, Microsoft HoloLens).
ДМ служит для фиксации маркеров, в том числе оптического маркера, на теле пациента. Это позволяет при использовании технологии смешанной реальности точно совместить реальный и виртуальный объект - тело пациента и виртуальную 3D модель (голограмму) пораженного органа.
Оптический маркер, закрепленный на держателе, служит для привязки виртуальной 3D модели индивидуальных анатомических структур пациента к его реальным органам. На маркер нанесено уникальное изображение, созданное таким образом, чтобы камера, встроенная в очки, смогла его распознать и определить ориентацию и положение маркера.
Наиболее близким по технической сущности является держатель маркера для выполнения хирургической операции на голове пациента с использованием смешанной реальности [патент RU 210665, опубликован 25.04.2022]. Полезная модель относится к медицине, а именно к устройствам для выполнения хирургических операций на голове пациента с использованием технологии смешанной реальности. Сущность полезной модели заключается в том, что держатель маркера для выполнения хирургической операции на голове пациента с использованием технологии смешанной реальности включает корпус, образованный двумя дугами, соединенными одним концом с носоупором, и два узла, закрепленных на свободных концах дуг с возможностью продольного перемещения, при этом корпус содержит площадку для крепления маркера и не менее трех рентгеноконтрастных меток, узлы включают ушные оливы, имеющие возможность поперечного перемещения, таким образом, держатель обеспечивает возможность настройки размера и фиксации на голове пациента в трех точках: с опорой на ткани над носовой костью черепа и в наружных слуховых проходах. В свободных концах дуг держателя маркера могут быть выполнены сквозные продолговатые отверстия, а каждый узел содержать болт с двумя гайками, продетый в продолговатое отверстие, на конце болта зафиксирована ушная олива, а гайки расположены по обе стороны дуги.
В описании полезной модели подробно изложен способ фиксации и применения держателя маркера для выполнения хирургической операции, поэтому предполагается допустимым рассматривать данное устройство в качестве ближайшего аналога заявляемому способу.
На подготовительном этапе держатель без о-маркера надевают на голову пациента и настраивают его размер, добиваясь надежной фиксации путем продольного перемещения узлов по дугам и поперечного перемещения олив, затем фиксируют в необходимом положении при помощи гаек. Проводят компьютерную томографию (КТ) головы с надетым держателем, при этом важно, чтобы корпус держателя помещался целиком, т.к. в него встроены рентгеноконтрастные метки, необходимые для последующего совмещения виртуальных анатомических структур с о-маркером. Рабочая станция томографа формирует трехмерное растровое изображение индивидуальной анатомии пациента. Используя полученные данные, выполняют сегментацию (построение контура) и трехмерную реконструкцию (построение трехмерной модели) всех анатомических структур. На КТ отмечают три рентгеноконтрастные метки. Так как заранее известно смещение о-маркера относительно меток держателя, программа может точно привязать положение анатомических структур к положению о-маркера.
Держатель с прикрепленным о-маркером надевают на голову пациента перед выполнением хирургической операции, при этом используют ту же настройку узлов, которая была сделана при проведении КТ. В результате этого держатель занимает в точности то же место, которое было при проведении КТ. Приложение очков смешанной реальности распознает о-маркер и определяет его положение в пространстве. Виртуальные 3D-модели анатомических структур автоматически выравниваются по о-маркеру, таким образом, совмещаясь с головой пациента.
Основным недостатком описанного устройства является невозможность его использования для выполнения хирургической операции на других частях тела, кроме головы, то есть отсутствие универсальности. Также, определенные сложности при проведении компьютерной томографии с надетым держателем, вызывает конструкция и размер устройства, так как выступающие части держателя могут помешать или воспрепятствовать движению подвижных частей томографа.
Сложность с совмещением в одном устройстве рентгеноконтрастного маркера (в дальнейшем - р-маркера) и оптического маркера (в дальнейшем -о-маркера) состоит в том, что они используются на разных этапах подготовки и выполнения хирургической операции с использованием технологии смешанной реальности, выполняют разные функции и к ним предъявляются разные требования.
Р-маркер задействован на этапе подготовки к проведению хирургической операции, а именно при проведении компьютерной томографии. Р-маркер - это устройство, включающее корпус с не менее чем тремя рентгеноконтрастными метками (в дальнейшем - р-метками), не лежащими на одной прямой, и изготовленными из рентгенопозитивных контрастных материалов (например, стали). Предпочтительно, чтобы корпус р-маркера был изготовлен из рентгенонегативных контрастных материалов, с минимальным поглощением рентгеновского излучения (например, полиамида). Конструкция устройства должна позволять разнесение р-меток в пространстве для достижения большей точности определения положения о-маркера относительно тела пациента, а, следовательно, и большей точности совмещения реального и виртуального объектов. При этом устройство должно быть компактным, чтобы не создавать помех работе томографа.
О-маркер применяется на этапе выполнения хирургической операции с использованием технологии смешанной реальности. Он, как это было сказано выше, задействован в системе оптического трекинга, и предназначен для привязки к месту виртуальной модели. Важными параметрами для о-маркера являются его тип и место размещения для лучшего распознавания очками. Может возникнуть необходимость такого расположения о-маркера, когда он достаточно сильно отдален от тела пациента, но при этом не перекрывает операционное поле и не мешает хирургу.
Держатель маркеров должен быть компактным и иметь возможность надежно фиксироваться на разных частях тела, в непосредственной близости от будущей оперируемой области. Способ фиксации держателя непосредственно влияет на конструктивное исполнение и желаемые параметры устройства.
Как видно из описания ближайшего аналога, в нем держатель маркеров совмещен с р-маркером, а о-маркер выступает в качестве отдельного устройства. Необходимость разнесения в пространстве р-меток неизбежно увеличивает размер держателя, что может сказаться на доступности операционного поля на этапе хирургической операции. В заявляемом способе держатель отделен от р-маркера, что позволяет более гибко подходить к выбору конструкции маркеров.
Предлагаемое техническое решение направлено на обеспечение компактности и универсальности устройства и улучшение, таким образом, условий подготовки и выполнения хирургической операции.
Сущность способа фиксации держателя маркеров на теле пациента для подготовки и выполнения хирургической операции с использованием технологии смешанной реальности заключается в том, что для обеспечения фиксации используют силу магнитного притяжения между двумя взаимодействующими элементами, которые оппозитно размещают на держателе и теле пациента, при этом применяют, по меньшей мере, одну пару таких элементов, где хотя бы один элемент из пары является источником магнитного поля.
Следующие признаки характеризуют изобретение в частных случаях его выполнения:
- Один из элементов пары фиксируют на теле пациента при помощи съемного средства, например, временного клея.
- Держатель маркеров дополнительно фиксируют на теле пациента при помощи съемного средства, например, временного клея, нанесенного между корпусом держателя и телом пациента.
- В качестве источника магнитного поля используют постоянный магнит.
- В качестве источника магнитного поля используют электромагнит.
- Применяют один элемент из пары в качестве источника магнитного поля.
- Применяют оба элемента из пары в качестве источника магнитного поля.
- Применяют одну пару взаимодействующих элементов.
- Применяют две пары взаимодействующих элементов.
- Применяют три пары взаимодействующих элементов. Технический результат заявляемого изобретения достигается за счет
использования силы магнитного притяжения для фиксации держателя на теле пациента и состоит в улучшении условий подготовки и выполнения хирургической операции, увеличении доступности операционного поля.
На прилагаемых к описанию чертежах дано:
- Способ фиксации держателя маркеров с тремя парами взаимодействующих элементов (фиг.1 - 2).
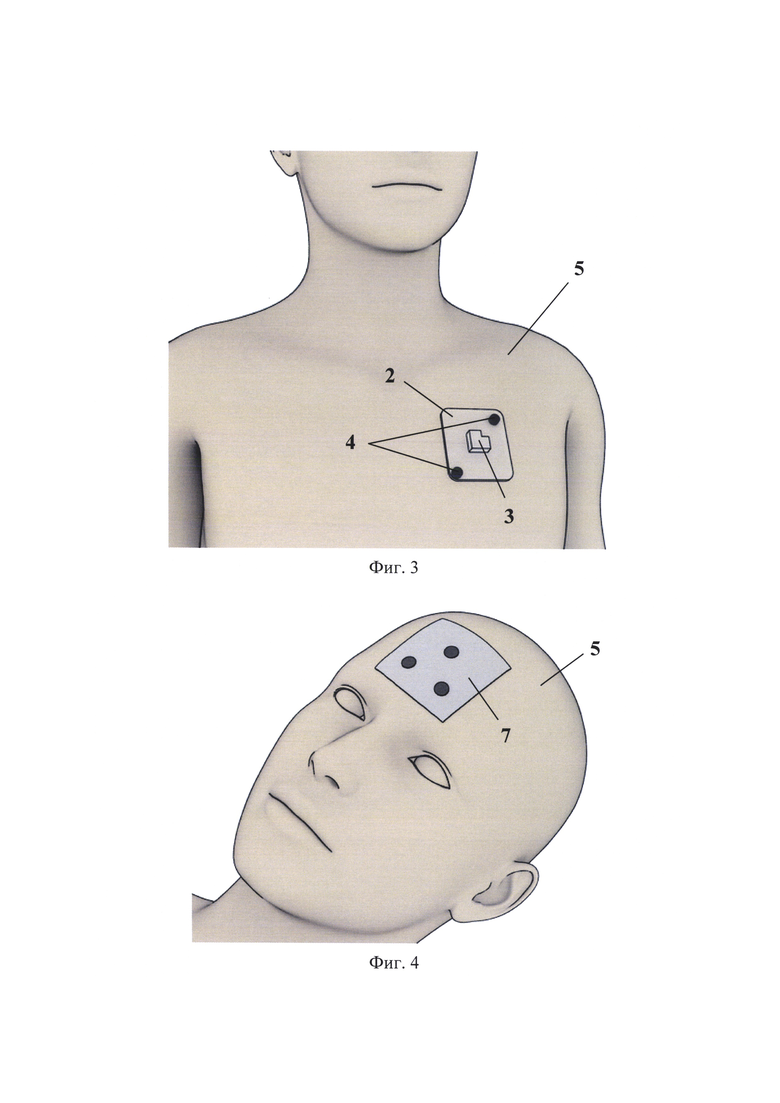
- Способ фиксации держателя маркеров с возможностью дополнительной фиксации при помощи съемного средства, например, временного клея (фиг.3).
- Способ увеличения надежности фиксации элементов на теле пациента при помощи пленки и временного клея, нанесенного между ней и телом пациента (фиг.4).
- Держатель маркеров с установленным р-маркером (фиг.5).
- Держатель маркеров с установленным о-маркером (фиг.6). Держатель маркеров 1 (в дальнейшем - держатель) для подготовки и
выполнения хирургической операции с использованием технологии смешанной реальности включает корпус 2 с размещенной на нем площадкой 3 для крепления маркеров и средство фиксации 4 держателя 1 на теле пациента 5. Для обеспечения фиксации держателя 1 используют силу магнитного притяжения между двумя взаимодействующими элементами, средство фиксации содержит по меньшей мере одну пару таких элементов. На фиг.1 показан держатель с тремя парами взаимодействующих элементов, пример одной из пар обозначен поз.6.
Для обеспечения магнитного взаимодействия между этими элементами, они должны быть изготовлены из магнитных материалов, например, ферромагнетиков, и, хотя бы один элемент из пары должен являться источником магнитного поля. Это может быть, например, постоянный магнит или электромагнит. Возможно разное сочетание взаимодействующих элементов в парах, например:
- магнитомягкий материал + постоянный магнит;
- магнитомягкий материал + электромагнит;
- постоянный магнит + постоянный магнит;
- постоянный магнит + электромагнит и т.п.
Для фиксации держателя 1, в зависимости от его конструкции и места установки, используют одну или несколько пар взаимодействующих элементов, которые оппозитно размещают на корпусе 2 и теле пациента 5, то есть один элемент из пары фиксируют на теле пациента 5, а второй - на корпусе 2 так, чтобы при приложении держателя 1 к телу 5 положение взаимодействующих элементов совпало (фиг.2).
При необходимости, держатель 1 дополнительно фиксируют при помощи временного клея, нанесенного между корпусом 2 и телом пациента 5. Такой вариант реализации способа может применяться, если корпус 2 держателя 1 представляет собой пластину, форма которой обеспечивает плотное прилегание к телу пациента 5 (например, как это показано на фиг.3).
Возможен вариант реализации способа, когда между взаимодействующими элементами вводят средство, способствующее более легкому разъединению указанных элементов, либо с этой же целью в качестве одного из элементов пары применяют электромагнит. Тогда для разъединения в паре магнитомягкий материал + электромагнит достаточно отключить питание электромагнита, а в паре постоянный магнит + электромагнит - поменять его полярность.
Для фиксации элементов средства 4 на корпусе 2 используют любые виды разъемных или неразъемных соединений, например, свинчивание, клепку, запрессовку, склеивание и т.п.
Для фиксации элементов средства 4 на теле пациента 5 преимущество отдают неинвазивным легкосъемным способам, например, склеиванию при помощи двустороннего скотча либо временного клея, нанесенного на элемент и/или тело 5. Для увеличения надежности фиксации на теле 5 элементы дополнительно фиксируют при помощи пленки 7 и временного клея, нанесенного между ней и телом пациента (фиг.4). Это не исключает возможности использования, при необходимости, инвазивных хирургических способов крепления элементов, например, свинчивания с костью.
Таким образом, держатель маркеров 1 фиксируют на любой части тела пациента 5. Маркеры крепят к площадке 3 держателя 1 при помощи разъемного соединения.
Для выполнения хирургической операции с использованием технологии смешанной реальности необходима предварительная подготовка.
Элементы пар размещают и фиксируют на теле пациента 5 до проведения КТ и не удаляют до окончания хирургической операции. Для позиционирования элементов на теле 5 используют предварительную разметку, шаблон или специальное устройство. Способ позиционирования элементов не важен для понимания заявляемого способа фиксации, поэтому подробно не рассматривается.
На подготовительном этапе держатель 1 с р-маркером 8 фиксируют на теле пациента 5 при помощи взаимодействующих парных элементов на корпусе 2 и теле 5 и проводят компьютерную томографию (КТ) пораженной области, при этом р-маркер 8 должен помещаться в эту область целиком. Р-маркер 8 включает р-метки 9, необходимые для последующего совмещения виртуальных анатомических структур с о-маркером 10.
Рабочая станция томографа формирует трехмерное растровое изображение индивидуальной анатомии пациента 5. Используя полученные данные, выполняют сегментацию (построение контура) и трехмерную реконструкцию (построение трехмерной модели) всех анатомических структур, которые представляют интерес для хирурга в предстоящей операции. Далее, на основе полученных ЗВ-моделей, планируют предстоящую операцию.
Загружают полученные данные в программу для настройки визуализации и позиционирования о-маркера 10, затем на КТ отмечают рентгеноконтрастные метки 9. Так как заранее известно смещение держателя 1 относительно р-маркера 8 и о-маркера 10, программа может точно привязать положение анатомических структур к положению о-маркера 10.
Держатель 1 с прикрепленным о-маркером 10 стерилизуют и фиксируют на пациенте 5 перед выполнением хирургической операции в том же положении, в каком был держатель 1 при проведении КТ-сканирования.
Приложение очков смешанной реальности распознает о-маркер 10 и определяет его положение в пространстве. Виртуальные 3D-модели анатомических структур автоматически выравниваются по о-маркеру 10, таким образом совмещаясь с реальной анатомией пациента 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| Держатель маркеров для подготовки и выполнения хирургической операции с использованием технологии смешанной реальности | 2022 |
|
RU2809175C1 |
| Способ подготовки и выполнения хирургической операции на голове с использованием смешанной реальности | 2020 |
|
RU2754288C1 |
| Держатель для маркера дополненной реальности при проведении операций в челюстно-лицевой области | 2023 |
|
RU2802120C1 |
| Способ подготовки и выполнения хирургической операции с использованием дополненной реальности и комплекс оборудования для её осуществления | 2019 |
|
RU2707369C1 |
| Способ одномоментного изготовления направляющего хирургического шаблона для установки дентальных имплантатов и индивидуальных постоянных абатментов | 2018 |
|
RU2674919C1 |
| Способ проекционной разметки хирургического доступа в нейрохирургии | 2022 |
|
RU2792552C1 |
| Способ стереотаксической лучевой терапии локализованного рака почки у неоперабельных пациентов | 2022 |
|
RU2808011C1 |
| ЭКСПЕРТНАЯ СИСТЕМА НА БАЗЕ МЕДИЦИНСКОГО МАНИПУЛЯЦИОННОГО РОБОТА ДЛЯ ТРАНСПЕДИКУЛЯРНОЙ ФИКСАЦИИ ПОЗВОНОЧНИКА | 2023 |
|
RU2833780C1 |
| Интерактивный медицинский фантом для отработки навыков проведения функциональных стереотаксических вмешательств | 2022 |
|
RU2790761C1 |
| НАПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПАЦИЕНТА ДЛЯ МЕДИЦИНСКОЙ ВИЗУАЛИЗАЦИИ | 2016 |
|
RU2714665C2 |


Изобретение относится к медицине, а именно к способам подготовки и выполнения хирургических операций с использованием технологии смешанной реальности. При этом для фиксации держателя маркеров 1 на теле пациента при подготовке и выполнении хирургической операции с использованием технологии смешанной реальности используют силу магнитного притяжения между двумя взаимодействующими элементами. Один элемент из пары 6 фиксируют на теле пациента 5. Второй элемент из пары фиксируют на держателе так, чтобы при приложении держателя к телу положение взаимодействующих элементов совпало. Применяют три пары таких элементов, где хотя бы один элемент из пары является источником магнитного поля. Один из элементов пары фиксируют на теле пациента при помощи временного клея. Держатель маркеров дополнительно фиксируют на теле пациента при помощи временного клея, нанесенного между корпусом 2 держателя и телом пациента. Обеспечивается увеличение доступности операционного поля путем улучшения условий подготовки и выполнения хирургической операции за счет компактности, универсальности и повышения надежности фиксации. 6 з.п. ф-лы, 6 ил.
1. Способ фиксации держателя маркеров на теле пациента для подготовки и выполнения хирургической операции с использованием технологии смешанной реальности, отличающийся тем, что для обеспечения фиксации используют силу магнитного притяжения между двумя взаимодействующими элементами, при этом один элемент из пары фиксируют на теле пациента, а второй – на держателе так, чтобы при приложении держателя к телу положение взаимодействующих элементов совпало, причем применяют три пары таких элементов, где хотя бы один элемент из пары является источником магнитного поля.
2. Способ фиксации держателя по п. 1, отличающийся тем, что один из элементов пары фиксируют на теле пациента при помощи съемного средства, например, временного клея.
3. Способ фиксации держателя по п. 1, отличающийся тем, что держатель маркеров дополнительно фиксируют на теле пациента при помощи съемного средства, например, временного клея, нанесенного между корпусом держателя и телом пациента.
4. Способ фиксации держателя по п. 1, отличающийся тем, что в качестве источника магнитного поля используют постоянный магнит.
5. Способ фиксации держателя по п. 1, отличающийся тем, что в качестве источника магнитного поля используют электромагнит.
6. Способ фиксации держателя по п. 1, отличающийся тем, что применяют один элемент из пары в качестве источника магнитного поля.
7. Способ фиксации держателя по п. 1, отличающийся тем, что применяют оба элемента из пары в качестве источника магнитного поля.
| ВЫПУСКНОЙ КЛАПАН ГЕРМОКАБИНЫ | 0 |
|
SU210665A1 |
| US 2017181698 A1, 29.06.2017 | |||
| DE 102007021960 A1, 20.11.2008 | |||
| CN 114601561 A, 10.06.2022 | |||
| МАГНИТНЫЕ МАРКЕРЫ ДЛЯ КОНТРОЛЯ ВО ВРЕМЯ ХИРУРГИЧЕСКОГО ВМЕШАТЕЛЬСТВА | 2019 |
|
RU2766663C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ИНОРОДНОГО ТЕЛА ВНУТРИ ПАЦИЕНТА ВНЕШНИМ МАГНИТНЫМ ПОЛЕМ | 2017 |
|
RU2683204C1 |

