Область техники, к которой относится изобретение
Изобретение относится к медицинской технике, а именно к роботизированным медицинским системам, обеспечивающим контроль за ходом выполнения хирургических операций по транспедикулярной фиксации позвоночника за счет навигации медицинских инструментов. В предлагаемой экспертной системе на базе медицинского манипуляционного робота для транспедикулярной фиксации позвоночника навигация осуществляется не только на основе данных по положению и ориентации медицинского инструмента, но и по силам и крутящим моментам, действующим на него.
В настоящем патенте рассматривается группа изобретений, набор из которых составляет экспертную систему. Уровень техники экспертной системы описывается из входящих в нее элементов: медицинского манипуляционного робота, рабочего органа на базе двухсоставной втулки, магнитных креплений рамок со сферическими отражателями на медицинский инструмент, упругого магнитного крепления рамки со сферическими отражателями на остистый отросток позвонка, игловой щуп с магнитным креплением, калибровочное устройство и способ навигации медицинских инструментов и рабочего органа медицинского манипуляционного робота.
Из уровня техники известны патенты на медицинские манипуляционные роботы, которые применяются для обеспечения навигации медицинских инструментов:
RU 2723762 С1 (19.12.201) - система хирургической навигации и микроманипуляций. В данной системе представлено устройство пространственной ориентации инструмента для хирургической навигации, которое представляет собой набор металлоконструкций, который приводится в движение вручную путем завинчивания и развинчивания креплений. Достоинством данной системы является простота, надежность и низкая стоимость. Однако, нет взаимосвязи с каким-либо навигационным устройством и точность при позиционировании медицинского инструмента полностью зависит от действий хирурга. Также, настройка системы на требуемое хирургу положение медицинского инструмента занимает много времени.
RU 2760468 C1 (25.11.2021) - универсальный робот для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии. Изобретение представляет собой манипулятор с пятью вращательными осями для выполнения ангиографии и диагностики. У данного робота не предусмотрена взаимосвязь с навигационной системой, а наведение медицинского инструмента происходит хирургом и, также, ответствует возможность безопасного останова.
Известны патенты на оси медицинских манипуляционных роботов:
ЕР 3045273 В1 - универсальная вращательная ось для манипуляционного робота, с возможностью ее крепления к выходному фланцу без использования вспомогательных деталей. На ряду с редуктором, электродвигателем, статором и платой управления включает в себя безопасное нормально замкнутое тормозное устройство, но без переменного момента торможения.
RU 94776 U1 - электромеханическая ось с волновым редуктором, которая может быть использован для создания и переконфигурирования многозвенных робототехнические устройств. Содержит встроенный редуктор, электродвигатель, статор, тормоз, датчики угловой скорости и перемещения, плату управления. Отличием данной оси от предлагаемой является отсутствие нормально замкнутого тормоза с переменным моментом торможения и упругих зажимов, для нивелирования внутренних биений конструкции.
Известны патенты на рабочие органы для медицинских манипуляционных роботов:
CN 101069964 А (10.05.2006) - роботизированная система для хирургических операций, управляемая навигационной системой. Данная система представляет собой рабочий орган, разработанный для крепления медицинских инструментов и рамок со сферическими отражателями к выходному фланцу манипуляционного робота. Достоинство данной системы заключается в ее простоте, однако крепление рамки со сферическими отражателями на медицинский инструмент посредством одного винта не обеспечивают необходимую надежность конструкции, т.к. любое касание может сместить рамку и ухудшить качество навигации.
US 20140066944 А1 (06.03.2014) - способ крепления медицинского инструмента на рабочем органе манипулятора. Рабочий орган представляет собой коническую или цилиндрическую втулку для направления инструмента по заданной траектории, имеется возможность установки датчика контакта для определения конечного положения инструмента. Недостатком данного изобретения является отсутствие крепления для ручки и рамки со сферическими отражателями.
ЕР 3351202 A1 (25.07.2018) - универсальная направляющая медицинских инструментов для роботизированной хирургической системы. Представленный рабочий орган имеет крепления для установки рамки со сферическими отражателями и ручки, для удобства перемещения его в пространстве, наведение инструментов происходит посредством использования канюль. Недостатком данного рабочего органа является необходимость использования специально разработанных медицинских инструментов с увеличенной длиной.
ЕР 3344179 В1 (30.06.2021) и US 10350013 В2 (16.07.2019) - робототехнические хирургические системы, которые являются рабочими органами, с функцией наведения медицинских инструментов посредством цилиндрических втулок. Особенность данных систем заключается в том, что измерение глубины захода инструмента происходит, либо посредством нанесенной на рабочий орган линейки, либо с помощью датчика положения на эффекте Холла или абсолютного оптического энкодера. Данное решение уступает стереофотограмметрической системе в точности измерения положения кончика инструмента.
US 20210244478 A1 (12.08.2021) - навигационные устройства для манипуляционного робота. Данное устройство, как и предыдущие выполняет роль направляющей для медицинского инструмента, реализованная в виде канюли, с возможностью измерения глубины захода инструмента. Для измерения применяется стереофотограмметрическая система, отслеживание положения происходит посредством использования двух рамок со сферическими отражателями, неподвижного и линейно перемещающегося на пружине. Недостатком данной системы является отсутствие возможности применения с транспедикулярными медицинскими инструментами.
US 11317978 В2 (03.05.2022) - рабочий орган для навигации медицинской иглы при проведении биопсии головного мозга. Точное наведение инструмента происходит посредством его фиксации зажимной деталью на пружине. Имеет универсальное быстросъемное крепления и отвечает условиям стерильности, но не приспособлен для использования в хирургии позвоночника, нет возможности установки медицинских инструментов в виде хирургического метчика и транспедикулярной отвертки.
WO 2015162256 А1 (29.10.2015) - держатель хирургического инструмента для использования в медицинской роботизированной системе. Данный рабочий орган представляет собой направляющую канюлю для медицинского инструмента, зажимаемую несколькими деталями на винт и штифты. Достоинствами данного рабочего органа является малые габаритные размеры, простота в установке и возможность стерилизации. Недостатком является необходимость в специально разработанных удлиненных медицинских инструментов, также рабочий орган поддерживает только два положения для размещения стереофотограмметрической рамки и ручки.
Известны патенты на крепления рамок со сферическими отражателями к медицинскому инструменту:
US 6021343 (01.02.2000) - крепление рамки со сферическими отражателями для хирургических шила, метчика и транспедикулярной отвертки. Изделие представляет собой переходник с закрепленной рамкой со сферическими отражателями, на обоих концах которого имеются выступы или отверстия квадратной формы с крепежным элементом. Имеется возможность быстрой смены инструмента прямо во время операции. Недостатком изделия является реализация конструкции переходного крепления между ручкой, инструментом и изделием, которое имеет люфт, что увеличивает погрешность положения и ориентации медицинского инструмента.
US 11644053 В2 (09.05.2023) - пружинное крепление рамки со сферическими отражателями к цилиндрической поверхности медицинского инструмента. Универсальное решение, подходящее для многих медицинских инструментов, но с возможностью крепления только специально сконструированной рамки со сферическими отражателями. Имеет много движимых деталей, что плохо сказывается на надежности конструкции. Отсутствует защитный механизм от смещения рамки со сферическими отражателями относительно медицинского инструмента, в результате непроизвольного касания.
Известны патенты на механические крепления рамок со сферическими отражателями на позвонки пациента:
ЕР 2349050 В1 (15.07.2015) - изделие для контролируемой регулировки хирургического позиционирующего устройства. Представляет собой стереофотограмметрическую рамку, которая устанавливается на несколько позвонков (от 3 до 6) посредством введения винтов в остистые отростки, на эту рамку устанавливаются направляющие для введения хирургических инструментов. Главным недостатком данного крепления является неучтенная подвижность позвонков в области их тел и межпозвонковых дисков, что может сместить фактическое положение позвонка от планируемого. Также, большой вес конструкции может вызывать необратимые деформации костной ткани позвонков.
US 20220257334 A1 (18.08.2022), CN 101862220 А (20.10.2010), US 007993353 В2 (09.08.2011) и US 20090062869 A1 (05.03.2009) - представляют собой различные вариации механических креплений для позвонков, состоящих из рамки со сферическими отражателями или крепления для нее, губок и винта, вращение которого перемещает одну или обе губки. Основная проблема механических креплений в том, что отсутствует контроль силы затягивания, при превышении некоторого порога которой начинаются необратимые повреждения позвонка, а также процесс функционирования механических креплений заключается в закручивании винта вручную или посредством специальной отвертки, что увеличивает время операции, по сравнению с упругим креплением, для раздвижения губок которого необходимо приложить небольшую силу пальцами.
DE 10 2007011568 А1 (11.09.2008) - костное механические крепление с стереофотограмметрическим маркером, построенный по принципу тонкой настройки расстояния между губками. Используя данное крепление возможно тонко регулировать силу затягивания. Однако конструкция крепления и сам механизм сложны в применении, для настройки расстояния между губок, вместо закручивания винта, необходимо вращать шестеренку, что негативно сказывается на времени проведения операции, по сравнению с упругим креплением.
Известны патенты на хирургические щупы:
US 20050113659 A1 (26.05.2005) - устройство для получения данных для хирургической навигационной системы. Особенность, описываемого в патенте изобретения, заключается в возможности перемещения одного сферического отражателя относительно остальных, которое регистрируется хирургической стереофотограмметрической системой и является сигналом к началу процесса записи измеряемых координат точек. Недостатком данной системы является наличие подвижных частей, при непроизвольном касании которых возможно нарушение процесса записи координат точек, а также в качестве рабочего органа щупа используется заостренный стержень из нержавеющей стали, который затупляется в процессе использования, что ухудшает точность определения координат поверхностей щупом.
WO 2017070124 А1 (27.04.2017) - электронное устройство для определения положения с акустической и визуальной обратной связью. Данное устройство применяется для определения траектории введения транспедикулярного винта в позвонок при проведении минимально-инвазивных операций. В качестве контактной части применяется медицинская одноразовая игла. Сенсорным элементом выступает 3-х осевой акселерометр. Применение данного устройства для измерения координат невозможно, отсутствует ручка и имеется провод для передачи данных, что усложняет его применение.
Известны патенты на устройства для калибровки медицинских инструментов в навигационной стереофотограмметрической системе:
ЕР 1364183 В1 (06.11.2013) - устройство калибровки инструмента и система слежения. Данное устройство состоит из небольшой подвижной платформы, передвигающейся по направляющей. Медицинский инструмент продевается в начальное отверстие и кончиком фиксируется на платформе. Процесс калибровки заключается в линейном перемещении кончика инструмента. Данное устройство включает в себя подвижные элементы и стереофотограмметрические маркеры, что избыточно и уменьшает общую надежность конструкции.
US 20110054449 A1 (03.03.2011) - устройство для калибровки медицинских инструментов с электронным измерительным (тактильным) модулем. Представляет собой блок с набором отверстий под инструмент с разным диаметром, на дне которого установлен сенсорный элемент. Процесс калибровки заключается в введении инструмента в отверстие и касание кончиком чувствительного элемента внутри устройства. При таком подходе невозможна калибровка ориентации оси медицинского инструмента, т.к. считывается только одно положение кончика медицинского инструмента.
US 005987960 (23.11.1999) - калибровщик инструмента. Точное позиционирование инструмента осуществляется за счет двух подвижных относительно друг друга элементов с отверстием для инструмента. При помещении медицинского инструмента в предусмотренные отверстия, относительное перемещение элементов устройства в противоположные стороны позволяет зафиксировать инструмент. Данное устройство не подходит для калибровки инструментов со сложной геометрией или резьбой, таких как транспедикулярный винт или хирургический метчик.
Известны патенты на способы навигации медицинского инструмента при проведении операции на позвоночнике:
ЕР 3258872 В1 (26.04.2023) - система для проведения минимально-инвазивных хирургических манипуляций по транспедикулярной фиксации позвоночника с применением медицинского манипуляционного робота. Особенностью данной системы заключается в применении направляющих расширителей для медицинского инструмента, которые помешаются непосредственно под кожу пациента. Недостатком данной системы является отсутствие экспертной составляющей для анализа хода выполнения хирургической манипуляции, с выводом данных хирургу на экран очков смешанной реальности.
ЕР 3824839 A1 (26.05.2021) - система позиционирования рабочего органа медицинского манипулятора для проведения хирургических манипуляций по введению медицинской иглы в органы пациента. В патенте описан метод навигации медицинских инструментов, основанный на математических преобразованиях положения целевой точки (в теле позвонка) и точки входа (на коже пациента) из системы координат пациента в систему координат робота. Данный метод навигации уменьшает количество необходимых креплений, изделий и устройств, а также упрощает процесс навигации. Во время процесса навигации медицинских инструментов робот автоматически перемещается всеми степенями подвижности одновременно, что может вызвать пересечение траектории перемещения рабочего органа и пациента.
US 8165659 В2 (24.04.2012) - метод навигации, основанный на измерении координат точек поверхностей костной структуры пациента. Данный патент включает в себя набор медицинских инструментов, устройств и методов для проведения хирургических вмешательств на коленном суставе. Особенность данной разработки в том, что описан метод определения положения костных структур пациента, относительно рамки со сферическими отражателями, посредством последовательного измерения координат точек их поверхностей, преобразования этого набора точек в поверхность, подбор из базы данных наиболее соответствующей этой поверхности трехмерную модель бедренной кости и окончательное масштабирование модели. Недостатком данного метода является необходимость в хранении базы данных трехмерных моделей, а также погрешность, возникающая при наложении модели на поверхность, т.к. анатомия костных структур индивидуальна для каждого пациента. Также данный метод не применим в хирургии позвоночника, по вышеуказанным причинам.
US 11672622 В2 (13.06.2023) - манипуляционная роботизированная система для проведения хирургических манипуляций по транспедикулярной фиксации позвоночника. Включает в себя медицинский манипулятор, рабочий орган, вспомогательное навигационное изделие для крепления к костным структурам пациента. Рабочий орган оснащен креплением для изолирующего медицинского чехла. Рамка со сферическими отражателями жестко закреплена на рабочем органе, который представляет собой направляющую канюлю. Также описан вариант крепления рамки со сферическими отражателями к рабочему органу с контролируемым поворотным механизмом. Недостатком данной системы является невозможность изменения положения рамки со сферическими отражателями на рабочем органе, что может вызвать неудобство при проведении хирургических манипуляций на труднодоступных местах позвоночника. Также имеющееся крепление с рамкой, которое фиксируется, посредством винтов, на двух остистых отростках, могут вызвать серьезные деформации позвонков при их случайном касании инструментом или хирургом.
Известны патенты на способ применения очков дополненной реальности для визуального получения навигационной информации в процессе проведения хирургической операции.
JP 2020518423 А (25.06.2020) - хирургическая навигационная система на основе стереофотограмметрической измерительной системы с трансляцией интерфейса на дисплей очков дополненной реальности. Система применяется как для операций на головном мозге, так и на позвоночнике. Недостатком является полное отсутствие описания визуального интерфейса и способов его применения.
US 11574446 В2 (07.02.2023) - набор устройств и методов для наведения медицинских инструментов во время проведения операций на позвоночнике с использованием очков смешанной реальности. В данном патенте описан метод связывания стереофотограмметрической системы и очков смешанной реальности, посредством жесткой связи и математического преобразования координат положения рамки со сферическими отражателями и qr-метки. Такое преобразование позволяет отобразить траекторию введения инструмента на дисплее очков смешанной реальности, но точность позиционирования и ориентации ниже, чем у стереофотограмметрической системы, так как погрешность определения положения qr-метки камерами, встроенными в очки смешанной реальности, варьируется от 1 до 2.5 мм.
В качестве ближайшего аналога (прототипа) выбран патент US 20190021795 A1 (24.06.2019), это роботизированная хирургическая платформа ExcelsiusGPS, которая включает в себя стереофотограмметрическую навигационную систему, подвижную платформу с установленным на ней манипуляционным роботом и сенсорным экраном, рабочий орган, набор медицинских инструментов, хирургический щуп, несколько вариантов механического крепления рамки на позвонок. Манипуляционный робот состоит из одной линейной и четырех вращательных степеней подвижности. Изолирующий медицинский чехол надевается на всю подвижную платформу и манипуляционного робота, рабочий орган устанавливается на выходной фланец робота, посредством быстросъемного крепления. Способ управления робота заключается в наведении рабочего органа на траекторию, определенную из данных интраоперационного рентгена, отсутствует последовательное перемещение осей медицинского манипуляционного робота и безопасный останов. Рабочий орган представляет собой направляющую втулку, в которую вставляется неподвижная направляющая канюля, но на рабочем органе отсутствуют крепления для рамки со сферическими отражателями и ручки. Крепление на позвонок представляет собой несколько вариаций механического крепления, передвижение губок которых задается посредством отвертки. Также в состав системы входит хирургический щуп из нержавеющей стали. Калибровка медицинского инструмента происходит с сопровождением в программном обеспечении. Метод навигации медицинского инструмента основан на совмещении трехмерных снимков костных структур пациента, полученных после проведения КТ пациента, и интраоперационной навигации посредством стереофотограмметрической системы, данный метод навигации требует проведения интраоперационного рентгена для уточнения траектории введения медицинских инструментов, что увеличивает радиационную нагрузку на хирурга и пациента. Одним из основных недостатков данной системы является отсутствие экспертного контроля за ходом выполнения хирургической манипуляции по силомоментным данным.
Раскрытие сущности изобретения
Предлагаемое изобретение направлено на увеличение безопасности проведения операций по транспедикулярной фиксации позвоночника за счет обеспечения экспертного контроля за ходом выполнения хирургических манипуляций во время навигации хирургических инструментов с использованием медицинского манипуляционного робота и очков смешанной реальности. Экспертный контроль за ходом выполнения хирургических манипуляций осуществляется по данным о положении и ориентации медицинских инструментов в пространстве, а также по силомоментным данным, получаемым в ходе выполнения хирургических манипуляций с медицинскими инструментами, с выводом результатов в удобном для хирурга виде.
Технический результат заключается в экспертной системе для транспедикулярной фиксации позвоночника на базе медицинского манипуляционного с рабочим органом на базе двухсоставной втулки скольжения. В экспертную систему также входят: стереофотограмметрическая система и рамки со сферическими отражателями, установленные на медицинском инструменте, набор магнитных креплений, игловой щуп, упругое крепление для позвонка, многофункциональное беспроводное устройство для установки сменных нейрохирургических инструментов, очки смешанной реальности и программное обеспечение, отражающее возможность предупреждения хирурга о превышении границы предполагаемых значений положения, ориентации, допустимых сил и крутящих моментов.
Поставленная задача решается, а заявленный технический результат достигается тем, что в экспертной системе на базе медицинского манипуляционного робота присутствуют все необходимые изделия и устройства, объединенные посредством способов их применения и программным обеспечением, для экспертного контроля за ходом выполнения хирургических манипуляций по транспедикулярной фиксации позвоночника.
Заявленное техническое решение позволяет, в отличие от ближайшего прототипа, проводить экспертный контроль за ходом выполнения хирургических манипуляций по силомоментным данным, представляющий собой измерение крутящего момента относительно глубины захода медицинского инструмента многофункциональным беспроводным устройством и оценка измеряемых параметров по введенным в программном обеспечении граничным функциональным условиям. Для наведения медицинских инструментов применяется медицинский манипуляционный робот, высота подъема которого над операционным столом варьируется за счет замены посадочных цилиндров переменной высоты. Система управления медицинского манипуляционного робота имеет в своем составе два блока переключения осей, предназначенных для переключения питания и управляющих команд на выбранную ось, для последовательного перемещения осей медицинского манипуляционного робота при наведении медицинского инструмента, устанавливаемого в рабочем органе медицинского манипуляционного робота. Блоки переключения осей, с наличием в них драйвера дублера, который позволяет дублировать функцию основного драйвера при наступлении нештатной ситуации, позволяют подключать дополнительные периферийные устройства или рабочие органы для управления ими. Рабочий орган обеспечивает перемещение медицинского инструмента за счет двухсоставной втулки из пары материалов с низким коэффициентом трения скольжения друг по отношению к другу, имеющего пять резьбовых отверстий, с шагом 60 градусов и общим углом обхвата в 300 градусов для крепления опорной ручки и рамки со сферическими отражателями, а также имеющего 17 конусообразных лунок на поверхности рабочего органа для проведения инициализации положения и ориентации оси рабочего органа в стереофотограмметрической системе. Оси медицинского манипуляционного робота включают в себя нормально замкнутые тормоза с переменным моментом торможения, которые позволяют при управлении движением оси медицинского манипуляционного робота осуществлять управляемый останов с повышенной безопасностью дублируя останов при помощи двигателя. В качестве тормоза с переменным моментом торможения могут выступать тормоза и муфты с принципами торможения на основе порошков, магнитореологических жидкостей, фрикционных элементов. Дополнительно медицинский манипуляционный робот имеет упругие зажимы в осях медицинского манипуляционного робота, которые позволяет обеспечить нивелирование внутренних биений конструкции. Для определения положения и ориентации медицинских инструментов в стереофотограмметрической системе, на них фиксируются рамки со сферическими отражателями, посредством магнитных креплений, в которых установлены постоянные магниты, состоящие из двух частей, в одной из которых имеются конические базирующие отверстия, а другие имеют ответные базирующие конусы, принцип работы которого основан на силе притяжения магнитов, которой достаточно чтобы удерживать рамку со сферическими отражателями на медицинском инструменте, но при непроизвольном касании с тяжелым или закрепленным объектом отсоединяется под действием внешней силы, такой способ крепления позволяет избежать перемещение рамки относительно медицинского инструмента, что может вызвать сбой в обеспечении функции навигации и повлечь за собой причинение вреда здоровью пациента. В качестве хирургического щупа применятся игловой щуп с магнитным креплением, на конце которого устанавливается одноразовая медицинская игла, что позволяет исключить погрешности измерения координат точек поверхностей из-за стирания кончика. Для нивелирования погрешностей, связанных с перемещением позвонка во время проведения хирургической манипуляции, применяется упругое магнитное крепление для удержания рамки со сферическими отражателями на остистом отростке позвонка, при этом фиксация упругого крепления на остистом отростке позвонка обеспечивается упругостью материала крепления, что ограничивает силу зажатия и исключает возможность повреждения остистого отростка позвонка, для раздвижения губок не требуется специального инструмента и происходит пальцами. Способ навигации медицинских инструментов во время проведения операции уменьшает радиационную нагрузку на хирурга и пациента, т.к. для обеспечения функции навигации требуется только одно предоперационное КТ пациента для получения трехмерных моделей позвонков и один интраоперационный рентген для контроля положения введенного транспедикулярного винта. Также не требуется введение дополнительных крепежных элементов в костные структуры пациента для рамки со сферическими отражателями, на подобии винтов Шанца (Schanz screw) или шпиц Киршнера (K-wire). Способ основан в сопоставлении трехмерной модели позвонка, с запланированными траекториями введения транспедикулярных винтов, и координатами точек на поверхности реального позвонка пациента. Таким образом, положение и ориентация запланированной в виртуальной среде траектории преобразуется в траекторию на реальном позвонке, координаты точек поверхностей которого были измерены посредством иглового щупа с магнитным креплением. По преобразованной траектории происходит навигация медицинских инструментов при проведении хирургических манипуляций по транспедикулярной фиксации позвоночника. Медицинский манипуляционный робот и многофункциональное беспроводное устройство в операционной применяются с изолирующими чехлами, остальные изделия, которые могут подвергнуться контакту с тканями пациента стерилизуются. Вся навигационная информация, в виде положения, ориентации и силомоментных данных от медицинских инструментов отображается при помощи программного обеспечения в очках смешанной реальности.
Краткое описание чертежей
Прилагаемые чертежи, которые включены в состав настоящего описания и являются его частью, иллюстрируют варианты осуществления изобретения и совместно с вышеприведенным общим описанием изобретения и нижеприведенным подробным описанием вариантов осуществления служат для пояснения принципов настоящего изобретения, где:
на фиг. 1 показан общий вид всех элементов экспертной системы на базе медицинского манипуляционного робота для транспедикулярной фиксации позвоночника.
на фиг. 2 показана структурная схема, отображающая взаимосвязь элементов экспертной системы на базе медицинского манипуляционного робота для транспедикулярной фиксации позвоночника.
на фиг. 3 показан конструкция оси медицинского манипуляционного робота в сборе.
на фиг. 4 показана конструкция оси медицинского манипуляционного робота с пространственным разделением частей.
на фиг. 5 показана первая часть набора элементов конструкции, устанавливаемых в осях медицинского манипуляционного робота.
на фиг. 6 показана вторая часть набора элементов конструкции, устанавливаемых в осях медицинского манипуляционного робота.
на фиг. 7 показана третья часть набора элементов конструкции, устанавливаемых в осях медицинского манипуляционного робота.
на фиг. 8 показана четвертая часть набора элементов конструкции, устанавливаемых в осях медицинского манипуляционного робота.
на фиг. 9 показана пятая часть набора элементов конструкции, устанавливаемых в осях медицинского манипуляционного робота.
на фиг. 10 показан набор посадочных цилиндров переменной высоты для регулирования высоты подъема медицинского манипуляционного робота.
на фиг. 11 показан общий вид медицинского манипуляционного робота.
на фиг. 12 показан внешний вид стойки системы управления медицинского манипуляционного робота на базе блока переключения осей.
на фиг. 13 показана структурная схема системы управления медицинского манипуляционного робота на базе блока переключения осей.
на фиг. 14 показана структурная схема системы управления блока переключения осей медицинского манипуляционного робота.
на фиг. 15 показана конструкция рабочего органа медицинского манипуляционного робота на базе двухсоставной втулки.
на фиг. 16 показан принцип работы магнитного крепления медицинского инструмента.
на фиг. 17 показана конструкция магнитного крепления для фиксации рамок со сферическими отражателями на медицинских инструментах.
на фиг. 18 показана конструкция иглового щупа с магнитным креплением для фиксации рамки со сферическими отражателями.
на фиг. 19 показан способ крепления рамок со сферическими отражателями на медицинские инструменты и игловой щуп, посредством магнитных креплений.
на фиг. 20 показана конструкция калибровочной установки для калибровки ориентации оси медицинского инструмента в стереофотограмметрической навигационной системе.
на фиг. 21 показана конструкция упругого магнитного крепления для установки специальной рамки со сферическими отражателями на остистый отросток позвонка.
на фиг. 22 показан алгоритм предоперационного этапа подготовки данных пациента для проведения хирургических манипуляций, по транспедикулярной фиксации позвоночника, с применением экспертной системы на базе медицинского манипуляционного робота.
на фиг. 23 показан алгоритм предоперационного этапа подготовки медицинских инструментов, изделий и устройств для проведения хирургических манипуляций, по транспедикулярной фиксации позвоночника, с применением экспертной системы на базе медицинского манипуляционного робота.
на фиг. 24 показан алгоритм интраоперационного этапа применения экспертной системы на базе медицинского манипуляционного робота для проведения хирургических манипуляций по транспедикулярной фиксации позвоночника.
на фиг. 25 показана вкладка редактирования данных пациента в программном обеспечении экспертной системы для предоперационного планирования и интраоперационной навигации медицинских инструментов.
на фиг. 26 показана вкладка разметки поверхностей трехмерных моделей позвонков в программном обеспечении экспертной системы для предоперационного планирования и интраоперационной навигации медицинских инструментов.
на фиг. 27 показана вкладка планирования траектории введения и глубины захода транспедикулярного винта в позвонок в программном обеспечении экспертной системы для предоперационного планирования и интраоперационной навигации медицинских инструментов.
на фиг. 28 показана вкладка калибровки и валидации положения кончика медицинского инструмента в программном обеспечении экспертной системы для предоперационного планирования и интраоперационной навигации медицинских инструментов.
на фиг. 29 показан вкладка калибровки и валидации ориентации оси медицинского инструмента в программном обеспечении экспертной системы для предоперационного планирования и интраоперационной навигации медицинских инструментов.
на фиг. 30 показана вкладка виртуальной сцены в режиме визуализации операционного поля в программном обеспечении экспертной системы для предоперационного планирования и интраоперационной навигации медицинских инструментов.
на фиг. 31 показана вкладка виртуальной сцены в режиме планирования положения стержней в программном обеспечении экспертной системы для предоперационного планирования и интраоперационной навигации медицинских инструментов.
на фиг. 32 показан способ задания движения рабочего органа медицинского манипуляционного робота на базе сенсорного управления по сигналам с силомоментного датчика.
на фиг. 33 показан способ начала движения рабочего органа медицинского манипуляционного робота на базе сенсорного управления по сигналам с силомоментного датчика.
на фиг. 34 показан способ пространственного совмещения оси рабочего органа медицинского манипуляционного робота и запланированной траектории введения медицинских инструментов в позвонок пациента.
на фиг. 35 показан способ инициализации рабочего органа медицинского манипуляционного робота посредством использования иглового щупа с магнитными креплениями для определения положения и ориентации оси рабочего органа медицинского манипуляционного робота в навигационной стереофотограмметрической системе.
на фиг. 36 показан алгоритм инициализации рабочего органа медицинского манипуляционного робота посредством использования иглового щупа с магнитными креплениями для определения положения и ориентации оси рабочего органа медицинского манипуляционного робота в навигационной стереофотограмметрической системе.
на фиг. 37 показан способ инициализации позвонка посредством использования иглового щупа с магнитными креплениями для сопоставления поверхностей трехмерной модели позвонка и положения реального позвонка в навигационной стереофотограмметрической системе.
на фиг. 38 показан алгоритм инициализации позвонка посредством использования иглового щупа с магнитными креплениями для сопоставления поверхностей трехмерной модели позвонка и положения реального позвонка в навигационной стереофотограмметрической системе.
на фиг. 39 показан способ безопасного останова рабочего органа медицинского манипуляционного робота при помощи подачи управляющих сигналов с блока переключения осей на выбранную ось медицинского манипуляционного робота.
на фиг. 40 показан способ применения рабочего органа медицинского манипуляционного робота на базе двухсоставной втулки.
на фиг. 41 показан способ применения многофункционального беспроводного устройства в составе рабочего органа медицинского манипуляционного робота.
на фиг. 42 показан способ осуществления экспертной функции для ограничения хода медицинских инструментов по силомоментным данным и контроля над ходом выполнения хирургической манипуляции по закручиванию транспедикулярных винтов и хирургических метчиков.
на фиг. 43 показан процесс осуществления экспертного контроля за ходом выполняемой хирургической манипуляций по силомоментным данным в графическом виде.
на фиг. 44 показан интерфейс, транслируемый на экран очков смешанной реальности: меню пользователя, мишень для навигации по положению, силомоментные данные в графической форме и дополнительные элементы.
на фиг. 45 показан медицинский манипуляционный робот и блок переключения осей.
на фиг. 46 показана ось медицинского манипуляционного робота
на фиг. 47 показаны очки смешанной реальности и пример отображения на экране очков смешанной реальности интерфейса для навигации по положению и ориентации, а также экспертная функция ограничения хода выполнения хирургической манипуляции по силомоментным данным. Позиции, приведенные на изображениях, соответствуют следующему:
1. Медицинский манипуляционный робот.
2. Рабочий орган медицинского манипуляционного робота на базе двухсоставной втулки.
3. Медицинский инструмент для проведения хирургических манипуляций по транспедикулярной фиксации позвоночника.
4. Стойка управления экспертной системы.
5. Стереофотограмметрическая система.
6. Рамка со сферическими отражателями.
7. Референсная рамка со сферическими отражателями.
8. Упругое крепление для установки рамки со сферическими отражателями к остистому отростку позвонка.
9. Магнитное крепление для фиксации рамки со сферическими отражателями на медицинском инструменте.
10. Очки смешанной реальности.
11. Монитор для вывода пользовательского интерфейса программного обеспечения экспертной системы.
12. Игловой щуп с магнитным креплением.
13. Операционный стол.
14. Многофункциональное беспроводное устройство, для осуществления экспертного контроля за ходом выполняемой хирургической манипуляций по силомоментным данным.
15. Выходной фланец оси медицинского манипуляционного робота.
16. Корпус фиксации подшипников оси медицинского манипуляционного робота.
17. Конический роликовый подшипник оси медицинского манипуляционного робота.
18. Внешний корпус редуктора оси медицинского манипуляционного робота.
19. Выходной вал оси медицинского манипуляционного робота.
20. Сальник выходного вала оси медицинского манипуляционного робота.
21. Шариковый подшипник выходного вала оси медицинского манипуляционного робота.
22. Волновой редуктор оси медицинского манипуляционного робота.
23. Крышка внутреннего корпуса редуктора оси медицинского манипуляционного робота.
24. Сальник входного вала редуктора оси медицинского манипуляционного робота.
25. Шариковый подшипник входного вала редуктора оси медицинского манипуляционного робота.
26. Внутренний корпус редуктора оси медицинского манипуляционного робота.
27. Кольцо входного вала редуктора оси медицинского манипуляционного робота.
28. Стакан двигателя оси медицинского манипуляционного робота.
29. Двигатель оси медицинского манипуляционного робота.
30. Промежуточный вал двигателя оси медицинского манипуляционного робота.
31. Электроизолирующая проставка платы оси медицинского манипуляционного робота.
32. Плата двигателя оси медицинского манипуляционного робота.
33. Держатель датчика оси медицинского манипуляционного робота.
34. Плата датчика оси медицинского манипуляционного робота.
35. Ротор датчика оси медицинского манипуляционного робота.
36. Общий промежуточный вал оси медицинского манипуляционного робота.
37. Разрезной фланец крепления управляемого тормоза оси медицинского манипуляционного робота.
38. Упругое крепление оси медицинского манипуляционного робота.
39. Управляемый тормоз оси медицинского манипуляционного робота.
40. Внешний корпус оси медицинского манипуляционного робота.
41. Шариковый подшипник общего промежуточного вала оси медицинского манипуляционного робота.
42. Внешняя крышка оси медицинского манипуляционного робота.
43. Корпус с отверстием для вывода проводов оси медицинского манипуляционного робота.
44. Крышка корпуса для вывода проводов оси медицинского манипуляционного робота.
45. Посадочный цилиндр тип 1.
46. Посадочный цилиндр тип 2.
47. Посадочный цилиндр тип 3.
48. Рельсы на операционном столе, для перемещения медицинского манипуляционного робота.
49. Каретка медицинского манипуляционного робота.
50. Основание медицинского манипуляционного робота.
51. Механический стягивающий шарнирно-рычажный зажим медицинского манипуляционного робота.
52. Стакан основания медицинского манипуляционного робота.
53. Стакан переходной первой оси медицинского манипуляционного робота.
54. Фланец первой оси медицинского манипуляционного робота.
55. Стакан первой оси медицинского манипуляционного робота.
56. Первая ось медицинского манипуляционного робота.
57. Звено первой оси медицинского манипуляционного робота.
58. Треугольные ребра жесткости звена первой оси медицинского манипуляционного робота.
59. Переходная проставка крепления второй оси медицинского манипуляционного робота.
60. Стакан переходной второй оси медицинского манипуляционного робота.
61. Вторая ось медицинского манипуляционного робота.
62. Звено второй оси медицинского манипуляционного робота.
63. Треугольные ребра жесткости звена второй оси медицинского манипуляционного робота.
64. Третья ось медицинского манипуляционного робота.
65. Переходная проставка крепления третьей оси медицинского манипуляционного робота.
66. Звено третьей оси медицинского манипуляционного робота.
67. Треугольные ребра жесткости звена третьей оси медицинского манипуляционного робота.
68. Переходная проставка крепления четвертой оси медицинского манипуляционного робота.
69. Четвертая ось медицинского манипуляционного робота.
70. Парный переходной фланец крепления к четвертой оси медицинского манипуляционного робота.
71. Парный переходной фланец крепления к датчику медицинского манипуляционного робота.
72. 6-ти компонентный датчик сил и крутящих моментов.
73. Выходной фланец медицинского манипуляционного робота.
74. Главный управляющий компьютер экспертной системы в стойке управления.
75. Блок переключения осей медицинского манипуляционного робота в стойке управления.
76. Дублирующий блок переключения осей медицинского манипуляционного робота в стойке управления.
77. Блок системы подачи питания в стойке управления.
78. Внешняя сеть питания.
79. Тачскрин.
80. Клавиатура.
81. Мышь.
82. Дополнительное периферийное оборудование.
83. Внешняя локальная сеть с интерфейсом Ethernet.
84. Динамик.
85. Платы коммутации в стойке управления.
86. Аналого-цифровой преобразователь в стойке управления.
87. Драйвер для медицинского манипуляционного робота в стойке управления.
88. Драйвер-дублер для медицинского манипуляционного робота в стойке управления.
89. Блок подачи аналоговых сигналов в стойке управления.
90. Сопрягающий модуль в стойке управления.
91. Селектор питания в стойке управления.
92. Блок защиты по питанию в стойке управления.
93. Сопрягающий блок индикации в стойке управления.
94. Блок индикации в стойке управления.
95. Транспедикулярная отвертка, применяемая для введения транспедикулярного винта в ткани позвонка, при проведении операции по транспедикулярной фиксации позвоночника.
96. Хирургический метчик, применяемый для нарезания резьбы в тканях позвонка, при проведении операции по транспедикулярной фиксации позвоночника.
97. Хирургическое шило, применяемое для создания направляющего отверстия в тканях позвонка, при проведении операции по транспедикулярной фиксации позвоночника.
98. Основание рабочего органа, которое крепится к выходному фланцу медицинского манипуляционного робота.
99. Втулка рабочего органа, которая крепится к медицинскому инструменту.
100. Зажим рабочего органа, необходимый для неподвижной фиксации медицинского инструмента.
101. Площадка для крепления рабочего органа к выходному фланцу медицинского манипуляционного робота.
102. Винты для крепления рабочего органа к площадке.
103. Установочный винт для крепления рамки со сферическими отражателями к рабочему органу.
104. Штифт с отверстием для крепления рамки со сферическими отражателями к рабочему органу.
105. Гайки для крепления штифта к установочному винту.
106. Крепление рамки со сферическими отражателями зажимного типа.
107. Ручка рабочего органа.
108. Винты для зажима медицинского инструмента во втулке рабочего органа.
109. Корпус основания магнитного крепления для медицинского инструмента.
110. Крышка основания магнитного крепления для медицинского инструмента.
111. Корпус ответной части магнитного крепления для рамки со сферическими отражателями.
112. Крышка ответной части магнитного крепления для рамки со сферическими отражателями.
113. Магнит.
114. Винты для основания магнитного крепления медицинского инструмента.
115. Гайки для основания магнитного крепления медицинского инструмента.
116. Винты для фиксации крышек магнитного крепления.
117. Гайки для фиксации крышек магнитного крепления.
118. Винт для крепления рамки со сферическими отражателями.
119. Гайка для крепления рамки со сферическими отражателями.
120. Ручка иглового щупа с магнитным креплением.
121. Зажим иглового щупа с одноразовой медицинской иглой и магнитным креплением.
122. Крышка иглового щупа с магнитным креплением.
123. Винт для крепления зажима иглового щупа с магнитным креплением.
124. Винт для крепления крышки иглового щупа с магнитным креплением.
125. Гайка для крепления крышки иглового щупа с магнитным креплением.
126. Одноразовая медицинская игла.
127. Неподвижное основание калибровочной установки для калибровки ориентации оси медицинского инструмента.
128. Подвижная ручка калибровочной установки для калибровки ориентации оси медицинского инструмента.
129. Винты для неподвижного основания калибровочной установки для калибровки ориентации оси медицинского инструмента.
130. Гайки для неподвижного основания калибровочной установки для калибровки ориентации оси медицинского инструмента.
131. Упругое магнитное крепление для установки специальной магнитной рамки со сферическими отражателями на остистый отросток позвонка.
132. Ручки упругого магнитного крепления для установки специальной магнитной рамки со сферическими отражателями на остистый отросток позвонка.
133. Специальная магнитная рамка со сферическими отражателями для упругого магнитного крепления.
134. Крышка специальной магнитной рамки со сферическими отражателями для упругого магнитного крепления.
135. Ответная часть магнитной специальной рамки со сферическими отражателями для упругого магнитного крепления.
136. Крышка ответной части магнитной специальной рамки со сферическими отражателями для упругого магнитного крепления.
137. Гайки для крышек магнитной специальной рамки со сферическими отражателями для упругого крепления.
138. Винты для крышек магнитной специальной рамки со сферическими отражателями для упругого магнитного крепления.
139. Сегментация позвонка из данных КТ пациента.
140. Экспорт трехмерных моделей позвонков из данных КТ пациента.
141. Загрузка данных пациента в программное обеспечение экспертной системы.
142. Разметка поверхностей на трехмерных моделях позвонков, в программном обеспечении экспертной системы.
143. Планирование траектории и глубины введения транспедикулярного винта на трехмерной модели позвонка, в программном обеспечении экспертной системы.
144. Стерилизация медицинских инструментов и изделий.
145. Сборка и установка, необходимого для работы экспертной системы, оборудования, включая медицинские инструменты, втулки рабочего органа, магнитные крепления, упругое магнитное крепление, игловой щуп, калибровочную установку.
146. Калибровка положения кончика медицинского инструмента.
147. Валидация результатов калибровки положения кончика медицинского инструмента.
148. Калибровка ориентации оси медицинского инструмента.
149. Валидация результатов калибровки ориентации оси медицинского инструмента
150. Подготовка медицинского манипуляционного робота к проведению операции, включающая в себя сборку робота, установку его на рельсы операционного стола и надевание медицинского изолирующего чехла.
151. Присоединение рабочего органа к выходному фланцу медицинского манипуляционного робота, посредством специального крепления, установку дополнительных элементов на рабочий орган.
152. Крепление рамки со сферическими отражателями к рабочему органу медицинского манипуляционного робота.
153. Инициализация рабочего органа, посредством использования иглового щупа с магнитным креплением.
154. Валидация результатов инициализации рабочего органа.
155. Выбор текущего позвонка в программном обеспечении экспертной системы.
156. Крепление упругого магнитного крепления на остистом отростке позвонка.
157. Инициализация позвонка, посредством использования иглового щупа с магнитным креплением.
158. Валидация результатов инициализации позвонка.
159. Выбор стороны позвонка в программном обеспечении экспертной системы.
160. Перемещение рабочего органа медицинского манипуляционного робота для совмещения его оси с заданной траекторией введения медицинских инструментов.
161. Проведение хирургических манипуляций по введению транспедикулярного винта в ткань позвонка.
162. Программная проверка на количество введенных винтов в позвонок.
163. Программная проверка общего количества введенных винтов относительно запланированного количества.
164. Точка входа медицинского инструмента в позвонок.
165. Целевая точка достижения медицинского инструмента в позвонке.
166. Точка начала движения рабочего органа медицинского манипуляционного робота на базе сенсорного управления узлом движения по сигналам с силомоментного датчика.
167. Точка останова движения рабочего органа медицинского манипуляционного робота на базе сенсорного управления узлом движения по сигналам с силомоментного датчика.
168. Точка входа медицинского инструмента на оси рабочего органа.
169. Точка выхода медицинского инструмента на оси рабочего органа.
170. Нажатие на кнопку начала процесса инициализации позвонка, в интерфейсе на экране очков смешанной реальности.
171. Звуковой сигнал о начале процесса инициализации позвонка/рабочего органа.
172. Перемещение кончика иглового щупа с магнитным креплением на запланированную поверхность.
173. Программная проверка расстояния между текущей позицией кончика иглового щупа с магнитным креплением и предыдущей записанной точкой.
174. Программная проверка на длительность неподвижного удержания кончика иглового щупа в определенной точке на поверхности позвонка.
175. Запись координат точки в программном обеспечении, при соблюдении заданных условий.
176. Звуковой сигнал об успешной записи координат точки на поверхности позвонка/рабочего органа.
177. Программная проверка на количество записанных координат точек на одной поверхности позвонка.
178. Звуковой сигнал об успешной записи координат всех запланированных точек на текущей поверхности.
179. Программная проверка для сравнения количества записанных и запланированных точек.
180. Звуковой сигнал об успешном окончании процесса инициализации позвонка/рабочего органа.
181. Программное сопоставление положения поверхностей трехмерной модели позвонка с измеренными координатами точек поверхностей позвонка.
182. Вывод результатов программного сопоставления в интерфейс на экран очков смешанной реальности.
183. Лунки для инициализации рабочего органа медицинского манипуляционного робота.
184. Нажатие на кнопку начала процесса инициализации рабочего органа, в интерфейсе на экране очков смешанной реальности.
185. Перемещение кончика иглового щупа с магнитным креплением в одну из лунок для инициализации на поверхности рабочего органа.
186. Программная обработка данных для определения оси рабочего органа медицинского манипуляционного робота из координат точек его поверхностей.
187. Валидация результатов процесса инициализации рабочего органа медицинского манипуляционного робота.
188. Ручка медицинского инструмента.
189. Настройка экспертной системы, включая запуск устройств в стойке управления, очков смешанной реальности, программного обеспечения и дополнительных программных модулей.
190. Начало хирургической манипуляции, при которой запускается процесс осуществления экспертного контроля за ходом выполняемой хирургической манипуляций.
191. Программная обработка данных о крутящем моменте и угловом перемещении медицинского инструмента, для построения зависимости крутящего момента от глубины захода медицинского инструмента.
192. Экспертная оценка величины крутящего момента на основе допустимого диапазона изменения крутящего момента на текущей глубине.
193. Превышение допустимого диапазона крутящего момента, вывод информации на экран очков смешанной реальности хирургу о необходимости прекращения выполнения хирургической манипуляции.
194. Экспертная оценка допустимости текущей глубины захода медицинского инструмента на основе заданного ограничения.
195. Превышение заданной глубины захода медицинского инструмента, вывод информации на экран очков смешанной реальности хирургу о необходимости прекращения выполнения хирургической манипуляции.
196. Расчет параметров средней линии по текущему набору собранных данных о крутящем моменте и глубине захода медицинского инструмента, во время выполнения хирургической манипуляции.
197. Экспертная оценка параметров средней линии на основе заданного диапазона изменения параметров средней линии.
198. Параметры средней линии не соответствуют допустимому диапазону изменения, вывод информации на очки смешанной реальности хирургу о необходимости корректировки хода выполнения хирургической манипуляции.
199. Конец хирургической манипуляции, происходит отключение экспертной системы.
200. Запись собранных данных о ходе проведения хирургической манипуляции в базу данных.
201. Вывод результатов проведенной хирургической манипуляции на экран монитора в пользовательский интерфейс программного обеспечения экспертной системы.
202. Меню пользователя на экране очков смешанной реальности.
203. Кнопка для неподвижного закрепления меню пользователя на экране очков смешанной реальности.
204. Кнопка переключения номера винта в позвонке в меню пользователя на экране очков смешанной реальности.
205. Кнопка переключения типа медицинского инструмента в меню пользователя на экране очков смешанной реальности.
206. Поле отображение текущего медицинского инструмента, присутствующего в зоне видимости стереофотограмметрической системы или выбранный в меню пользователя на экране очков смешанной реальности.
207. Кнопка переключения текущего позвонка в меню пользователя на экране очков смешанной реальности.
208. Поле отображение номера текущего позвонка в меню пользователя на экране очков смешанной реальности.
209. Кнопка включения вкладки выбора поверхностей в меню пользователя на экране очков смешанной реальности.
210. Кнопка включения вкладки виртуальной сцены в меню пользователя на экране очков смешанной реальности.
211. Кнопка удаления точки при инициализации позвонка в меню пользователя на экране очков смешанной реальности.
212. Кнопка начала процесса инициализации позвонка в меню пользователя на экране очков смешанной реальности.
213. Поле отображения результатов инициализации позвонка в меню пользователя на экране очков смешанной реальности.
214. Ось глубины захода медицинского инструмента экспертной функции-ограничения выполнения хирургической манипуляции на экране очков смешанной реальности.
215. Ось крутящего момента, действующего на медицинский инструмент, экспертной функции-ограничения выполнения хирургической манипуляции на экране очков смешанной реальности.
216. График зависимости крутящего момента от глубины захода медицинского инструмента - экспертной функции-ограничения выполнения хирургической манипуляции на экране очков смешанной реальности.
217. Средняя линия зависимости крутящего момента от глубины захода экспертной функции-ограничения выполнения хирургической манипуляции на экране очков смешанной реальности.
218. Прямые обозначающие допустимый диапазон экспертной функции-ограничения выполнения хирургической манипуляции на экране очков смешанной реальности.
219. Основная часть элемента наведения для интраоперационной навигации медицинских инструментов на экране очков смешанной реальности.
220. Центрирующий стержень элемента наведения для интраоперационной навигации медицинских инструментов на экране очков смешанной реальности.
221. Кольцо грубого наведения по ориентации для интраоперационной навигации медицинских инструментов на экране очков смешанной реальности.
222. Кольцо точного наведения по ориентации для интраоперационной навигации медицинских инструментов на экране очков смешанной реальности.
223. Прицел грубого наведения по положению для интраоперационной навигации медицинских инструментов на экране очков смешанной реальности.
224. Прицел точного наведения по положению для интраоперационной навигации медицинских инструментов на экране очков смешанной реальности.
225. Запланированное положению медицинского инструмента для интраоперационной навигации медицинских инструментов на экране очков смешанной реальности.
226. Элемент интерфейса для визуализации глубины захода мед инструмента для интраоперационной навигации медицинских инструментов на экране очков смешанной реальности.
227. Численные данные об ошибке позиционирования мед инструмента для интраоперационной навигации медицинских инструментов на экране очков смешанной реальности.
228. Численные данные о глубине захода медицинского инструмента для интраоперационной навигации медицинских инструментов на экране очков смешанной реальности.
229. Трехмерная модель позвонка с отмеченными областями для упрощения процесса проведения инициализации позвонка на экране очков смешанной реальности.
230. Текущая поверхность для измерения координат точек при проведении инициализации позвонка на экране очков смешанной реальности.
Осуществление изобретения
Экспертная система на базе медицинского манипуляционного робота для транспедикулярной фиксации позвоночника - это изобретение, включающее в себя ряд устройств и изделий, необходимых для обеспечения экспертного контроля за ходом выполнения хирургических манипуляций, по положению, ориентации и силомоментным данным, с трансляцией на экран очков смешанной реальности навигационной информации.
Общий вид всех используемых устройств и изделий в экспертной системе на базе медицинского манипуляционного робота для транспедикулярной фиксации позвоночника представлен на фиг. 1. Основными компонентами системы являются: медицинский манипуляционный робот 1, с установленным на него рабочим органом 2, удерживающим и направляющим медицинский инструмент 3 при проведении хирургических манипуляций, стойка управления 4, стереофотограмметрическая система 5, необходимая для определения положения рамок со сферическими отражателями 6 относительно неподвижной референсной рамки со сферическими отражателями 7. На остистом отростке пациента устанавливается упругое магнитное крепление 8. Фиксация рамок со сферическими отражателями 6 на медицинском инструменте 3, происходит посредством магнитных креплений 9. Навигационная информация о ходе проведения операции транслируется на экран очков смешанной реальности 10. Программное обеспечение экспертной системы транслируется на экран дополнительного монитора 11. В качестве медицинского щупа применяется игловой щуп с магнитным креплением 12. При проведении операции пациент находится на операционном столе 13, на котором также устанавливается медицинский манипуляционный робот 1. Экспертный контроль за ходом выполнения хирургических манипуляций по силомоментным данным происходит посредством использования многофункционального беспроводного устройства 14.
Структурная схема, отображающая взаимосвязь элементов экспертной системы на базе медицинского манипуляционного робота для транспедикулярной фиксации позвоночника представлена на фиг. 2. Управление медицинским манипуляционным роботом, происходит посредством стойки управления 4, также на нее поступают данные о положении медицинских инструментов 3, рабочего органа 2, упругого магнитного крепления 8 и неподвижной референсной рамки со сферическими отражателями 7. С многофункционального беспроводного устройства 14 поступают силомоментные данные о ходе проводимой хирургической манипуляции.
Основным элементом, обеспечивающим удержание и навигацию медицинского инструмента 3 в экспертной системе, является медицинский манипуляционный робот 1, который состоит из четырех осей, габаритные размеры которых изменяются в зависимости от внутренних характеристик осей, обеспечиваемых комплектующими элементами. Три из четырех осей имеют отличные друг от друга габаритные размеры. Отличие внутренних характеристик осей обеспечивает их грузоподъемность. Так, более крупная ось устанавливается близ основания, 2 оси среднего типоразмера находятся в середине медицинского манипуляционного робота, и последняя ось, самая малая, находится близ рабочего органа. Конструкция каждой оси медицинского манипуляционного робота 1 в сборе показана на фиг. 3. Ось медицинского манипуляционного робота состоит из пяти частей.
Первая часть оси медицинского манипуляционного робота 1 представлена на фиг. 4. Выходной фланец 15 устанавливается поверх корпуса фиксации подшпиников 16, внутрь которого помещаются два конических роликовых подшипника 17. Полученная конструкция помещается во внешний корпус редуктора 18. Также выходной фланец 15 крепится винтами к выходному валу 19.
Вторая часть оси медицинского манипуляционного робота 1 представлена на фиг. 5. Сальник 20 и шариковый подшипник 21 выходного вала устанавливаются на верхнюю часть вала волнового редуктора 22, сверху к волновому редуктору 22 присоединяется выходной вал 19, снизу сальник 20 и шариковый подшипник 21 фиксируются крышкей внутреннего корпуса редуктора 23. Фиксируемый крышкой внутреннего корпуса редуктора 23, сальник 24 и шариковый подшипник 25 выходного вала редуктора закрепляются во внутреннем корпусе редуктора 26. Редуктор 22 крепится к внутреннему корпусу 26, к нижней части вала редуктра 22 крепиться кольцо входного вала редуктора 27.
Третья часть оси медицинского манипуляционного робота 1 представлена на фиг. 6. В стакан двигателя 28 помещается двигатель 29, с установленным промежуточным валом двигателя 30. На корпус стакана 28 помещается электроизолирующая пластмассовая проставка 31, плата двигателя 32, держатель датчика 33, плата датчика 34. Промежуточный вал двигателя 30 и ротор датчика 35 соединяется с общим промежуточным валом 36.
Четвертая часть оси медицинского манипуляционного робота 1 представлена на фиг. 7. Разрезной фланец крепления управляемого тормоза 37, посредством упругих зажимов 38, крепится к управляемому тормозу 39.
Пятая часть оси медицинского манипуляционного робота 1 представлена на фиг. 8. Во внешний корпус 40 устанавливается шариковый подшипник общего промежуточного вала 41 и закрывается внешней крышкой 42. На боковой стороне внешнего корпуса 40 устанавливается корпус с отверстиями для вывода проводов 43, который закрывается крышкой 44.
Конструкция оси медицинского манипуляционного робота 1 с пространственным разделением частей показана на фиг. 9. Соединение частей оси друг с другом происходит поэтапно, в следующем порядке: первая часть (см. фиг. 4) соединяется со второй частью (см. фиг. 5), посредством крепления внешнего корпуса редуктора 18 к внутреннему корпусу редуктора 26 и волновому редуктору 22, а также крепления выходного вала 19 к выходному фланцу 15. Вторая часть (см. фиг. 5) соединяется с третьей частью (см. фиг. 6), посредством крепления внутреннего корпуса редуктора 26 к стакану двигателя 28, и крепления общего промежуточного вала 35 к валу волнового редуктора 22. Третья часть (см. фиг. 6) соединяется с четвертой части (см. фиг. 7), посредством крепления управляемого тормоза 39 с общим промежуточным валом 36. Четвертая часть (см. фиг. 7) соединяется с пятой частью (см. фиг. 8), посредством крепления внешнего корпуса 40 к разрезному фланцу крепления управляемого тормоза 37 и внутреннему корпусу редуктора 26.
Высота подъема медицинского манипуляционного робота 1 над плоскостью операционного стола 13, обеспечивается посадочными цилиндрами переменной высоты с конусообразным верхом, представленными на фиг. 10. Всего в наборе имеется три посадочных цилиндра: низкий цилиндр с высотой 50 мм 45, средний цилиндр с высотой 70 мм 46 и высокий цилиндр с высотой 90 мм 47.
Общий вид медицинского манипуляционного робота 1 показан на фиг. 11, На рельсы 48 с каретками 49 закрепляется основание 50, на который устанавливается стакан основания 51. Для регулирования высоты робота между стаканом основания 51 и переходным стаканом первой степени подвижности 52 устанавливаются посадочные цилиндры переменной высоты 45-47, все это фиксируется механическими стягивающими шарнирно-рычажными зажимами 53. К стакану основания 51 присоединяется фланец первой оси 54, к которому прикручивается стакан первой оси 55. Первая ось 56 фиксируется на стакане 55 винтами. Звено 57 прикручивается к фланцу первой оси 54. К звену первой оси 57 крепятся треугольные ребра жесткости звена первой оси 58 с алюминиевой переходной проставкой крепления узла второй оси 59. Через переходной стакан второй оси 60, вторая ось 61 прикрепляется к алюминиевой переходной проставке крепления второй оси 59 и переходному стакану второй оси 60, которые присоеденены к звену первой оси 57. К звену второй оси 62 крепится треугольные ребра жесткости звена второй оси 63, которые также прикручиваются к фланцу второй оси 61. Третья ось 64 закрепляется в алюминиевой переходной проставке крепления третьей оси 65. К звену третьей оси 66 прикручены треугольные ребра жесткости звена третьей оси 67 и алюминиевая переходная проставка крепления четвертой оси 68. Через алюминиевую переходную проставку крепления четвертой оси 68 устанавливается четвертая ось 69, а также на фланец узла закрепляются парные переходные фланцы 70-71, которые крепятся к 6-ти компонентному датчику сил и крутящих моментов 72, выходной фланец 73 медицинского манипуляционного робота 1 устанавливается сверху.
Система управления экспертной системы реализована в стойке управления 4. Внешний вид стойки системы управления медицинского манипуляционного робота 1 на базе блока переключения осей представлена на фиг. 12. Стойка управления 4 представляет собой конструкцию с креплениями типоразмера 19 дюймов, для установки в нее блоков системы управления. В ней располагаются главный управляющий компьютер экспертной системы 74, блок переключения осей 75, дублирующий блок переключения осей 76 и блок-системы подачи питания 77.
Система управления медицинского манипуляционного робота на базе блока переключения осей представлена на фиг. 13. Блок системы подачи питания 77 сопряжен, посредством проводов, с внешней сетью питания 78, главным управляющим компьютером 74, с блоком переключения осей 75 и дублирующим блоком переключения осей 76. Задачей системы подачи питания является преобразование переменного напряжения приходящего от внешней сети питания 78 в постоянное напряжение для обеспечения бесперебойным питанием все остальные компоненты системы управления. Главный управляющий компьютер 74 сопряжен посредством проводов питания с системой подачи питания 77 и посредством общей шины данных с блоком переключения осей 75 и его дублером 76. Так же управляющий компьютер 74 сопряжен с устройствами ввода информации от оператора в виде тачскрина 79, клавиатуры 80, мыши 81 и внешней сетью ethernet 83 для связи с другими устройствами, являющимися частью локальной сети, такими как стереофотограмметрическая система 5, и динамиком 84 для звуковой индикации. Задачей главного управляющего компьютера является обеспечение бесперебойной работы программного обеспечения, отвечающего за прием управляющих команд от оператора при помощи устройств ввода информации и от внешних управляющих устройств через локальную сеть ethernet 83, обработку полученных команд и формирование в соответствии с ними команд управления для блоков, подключенных по общей шине данных системы управления. Блоки переключения осей 75-76 сопряжены с медицинским манипуляционным роботом 1, посредством проводов. Так же блоки переключения осей 75-76 сопряжены с элементами дополнительного периферийного оборудования 82, представляющего собой конструкцию, сопрягающую один или два узла с двигателями вращательного движения и закрепляемыми на фланце манипулятора либо рядом с манипулятором. Задачей каждого блока переключения осей является формирование управляющих воздействий для одного выбранного узла медицинского манипуляционного робота 1 или узла, являющегося частью дополнительного периферийного оборудования 82 в соответствии с управляющими командами, приходящими от главного управляющего компьютера 74 по общей шине данных. Таким образом, одновременно посредством двух блоков переключения осей становится возможным управлять двумя узлами относящимся к медицинскому манипуляционному роботу 1 или к дополнительному периферийному оборудованию 82.
Система управления блока переключения осей включает в себя (см. фиг. 14): семь плат коммутации 85, аналого-цифровой преобразователь (АЦП) 86, драйвер 87, драйвер-дублер 88, блок подачи аналоговых сигналов 89, сопрягающий модуль 90, селектор питания 91, блок защиты по питанию 92, сопрягающий блок индикации 93. Платы коммутации 85 сопряжены посредством провода с узами манипулятора 56, 61, 64, 69 или с дополнительным периферийным оборудованием 82 и посредством разъемного соединения с сопрягающим модулем 90. Задачей плат коммутации является сопряжение одного из подключенных узлов манипулятора 56, 61, 64, 69 или дополнительного периферийного оборудования 82 путем открытия сигнальных и силовых линий на одной из плат коммутации 85 в соответствии с управляющими сигналами от сопрягающего модуля 90. Аналого-цифровой преобразователь (АЦП) 86 сопряжен с блоком защиты по питанию 92 и сопрягающим модулем 90. Его задачей является считывание данных с 6-ти компонентного датчика сил и крутящих моментов 72, расположенного на медицинском манипуляционном роботе 1. Сопрягающий модуль 90 соединен с платами коммутации 85, блоком АЦП 86, драйвером 87, драйвером дублером 88, блоком подачи аналоговых сигналов 89 и главным управляющим компьютером 74. Задачей данного блока является в соответствии с управляющими командами от главного управляющего компьютера 74 осуществлять управление платами коммутации 85, сопрягая функциональные проводники блоков с узлами манипулятора 56, 61, 64, 69 или с дополнительным периферийным оборудованием 82. Драйвер 87 и драйвер-дублер 88 сопряжены с селектором по питанию 91, главным управляющим компьютером 74 и сопрягающим модулем 90. Задачей драйвера 87 и драйвера дублера 88 является формирование управляющих сигналов для двигателей узлов манипулятора в соответствии с управляющими командами от главного управляющего компьютера 74 и данными, получаемыми от датчиков обратной связи 34, расположенных внутри узлов манипулятора. Блок подачи аналоговых сигналов 89 сопряжен с блоком защиты по питанию 92, сопрягающим модулем 90 и главным управляющим компьютером 74. Задачей блока подачи аналоговых сигналов 89 является преобразование входных напряжений от блока защиты по питанию 92 и в соответствии с командами от управляющего компьютера 74 формирование выходных напряжений для тормозных элементов узлов манипулятора путем подачи их на сопрягающий модуль 90. Селектор питания 91 сопряжен посредством проводов с драйвером 87, драйвером дублером 88, блоком защиты по питанию 92. Задачей селектора питания является переключение питания между драйвером 87 и драйвером дублером 88 в соответствии с сигналами, приходящими от главного управляющего компьютера 74 по портам ввода-вывода общего назначения (GPIO). Блок защиты по питанию 92 сопряжен посредством проводов питания с сопрягающим модулем 90, АЦП 86, драйвером 87, драйвером-дублером 88, блоком подачи аналоговых сигналов 89, селектором питания 91 и системой подачи питания 77. Задачей блока защиты по питанию 92 является фильтрация напряжения поступающего в блок переключения осей 75-76 и аварийное отключение в случае выхода входного напряжения за заданные диапазоны. Сопрягающий блок индикации 93 сопряжен с семью блоками индикации 94 и с главным управляющим компьютером 74 при помощи общей шины данных. Задачей сопрягающего блока индикации 93 является подача управляющих сигналов на блоки индикации 94 в соответствии с командами, приходящими от главного управляющего компьютера 74.
При проведении хирургических манипуляций по транспедикулярной фиксации позвоночника основными применяемыми медицинскими инструментами являются отвертка с установленным транспедикулярным винтом 95, хирургический метчик 96 и хирургическое шило 97. Рабочий орган 2 обеспечивает удержание, наведение и перемещение медицинского инструмента 3 за счет двухсоставной втулки из пары материалов с низким коэффициентом трения скольжения друг по отношению к другу. И состоит из трех деталей (см. фиг. 15): основание 98 из нержавеющей стали и втулки 99 из фторопласта-4. Дополнительным элементом является зажим 100 из нержавеющей стали, необходимый для неподвижной фиксации медицинского инструмента 3 во втулке 99. Основание рабочего органа 98 крепится к выходному фланцу 73 медицинского манипуляционного робота 1, посредством площадки 101 и винтов 102. На основании рабочего органа имеется пять резьбовых отверстий для крепления рамки со сферическими отражателями 6, посредством вкручивания установочного винта 103, закручиванием на него штифта с резьбовым отверстием 104, фиксируемого гайками 105 и установки крепления для рамок со сферическими отражателями зажимного типа 106. Также, на поверхностях основания рабочего органа 98 имеются пять резьбовых отверстий для вкручивания ручки 107, которая обеспечивает удобное перемещение рабочего органа 2 в пространстве. Медицинский инструмент 3 устанавливается во втулке 99, посредством зажима 100, необходимого для введения винтов 108, которые фиксируют медицинский инструмент 3 неподвижно втулки 99. Для каждого из медицинских инструментов 95-97, применяется индивидуальная втулка 99 повторяющая внешний контур инструмента.
Для определения положения и ориентации медицинских инструментов 3 во время проведения операции применяется стереофотограмметрическая навигационная система 5 с набором рамок со сферическими отражателями 6. Рамки на медицинский инструмент устанавливаются посредством магнитных креплений 9. Магнитное крепление состоит из двух частей (см. фиг. 16), одна из которых крепится к медицинскому инструменту 3 и существует в двух вариантах (отдельно для транспедикулярной отвертки 95 и отдельно для хирургических метчика 96 и шила 97) или встроена в изделие (как в игловом щупе 12), вторая универсальная и подходит для любого инструмента, к которой крепится рамка со сферическими отражателями 6. Часть магнитного крепления 9 устанавливаемая на медицинский инструмент 3 включает в себя корпус основания магнитного крепления 109 и крышку 110. Ответная часть магнитного крепления 9 также состоит из корпуса 111 и крышки 112. Внутрь углубления помещаются магниты 113, обеспечивающие фиксацию рамки со сферическими отражателями 6 на медицинском инструменте 3. Принцип работы магнитного крепления заключается в силе притяжения двух постоянных магнитов, один из которых устанавливается на медицинский инструмент 3, а другой на рамку со сферическими отражателями 6. Силы притяжения магнитов достаточно чтобы удерживать рамку 6 неподвижно относительно медицинского инструмента 3, при проведении хирургических манипуляций по введению хирургического шила 97, хирургического метчика 96 или транспедикулярных винтов в позвонок, но при воздействии внешней силы больше рассчитанного порога, вызванной непроизвольным касанием рамки, магнитное крепление 111 с рамкой 6 отсоединяется от медицинского инструмента. Такая конструкция крепления позволяет исключить возможное перемещение рамки со сферическими отражателями 6 относительно медицинского инструмента 3, что делает невозможным дальнейшее корректное определение положения кончика и ориентации оси медицинского инструмента 3. Отсоединение магнитного крепления 133 с рамкой 6 означает необходимость в повторной калибровке медицинского инструмента 3.
Конструкция магнитного крепления 9 для фиксации рамок со сферическими отражателями 6 на медицинских инструментах 3 показана на фиг. 17. Основание магнитного крепления фиксируется на инструменте винтами 114 и гайками 115. Корпуса 109, 111 и крышки 110, 112 магнитных креплений крепятся на винты 116 и гайки 117. Крепление рамки со сферическими отражателями 6 происходит на винт 118 и гайку 119. Детали магнитных креплений производятся аддитивным методом из биоинертной и автоклавируемой пластмассы. Элементы крепежа из нержавеющей стали.
Для инициализации позвонков и рабочего органа, при проведении хирургических манипуляций по транспедикулярной фиксации позвоночника, применяется игловой щуп с магнитным креплением 12, конструкция которого представлена на фиг. 18 (а). Основными элементами иглового щупа является эргономичная ручка 120, зажим иглы 121, крышка 122 и винт для крепления иглы 123. Магнит 113 помещается в специальное углубление в ручке 120 и закрывается крышкой 122 на винты 124 и гайки 125. Одноразовая медицинская игла 126 закрепляется посредством зажимной детали 121 и винта 123. В качестве ответной части применяется универсальное магнитное крепление. Детали иглового щупа с магнитным креплением производятся аддитивным методом из биоинертной и автоклавируемой пластмассы. Элементы крепежа из нержавеющей стали. На фиг. 18 (б) показан способ сборки иглового щупа с магнитным креплением перед использованием, заключающийся в последовательной установке медицинской иглы 126 в зажим иглы 121, перемещение зажима в ручку иглового щупа 120 и фиксация зажима 121 винтом 123.
Рамки со сферическими отражателями 6 установленные на медицинские инструменты 3 и игловой щуп 12, посредством магнитных креплений 9 показан на фиг. 19. Для установки собранных магнитных креплений 9 на медицинские инструменты 3 необходимо продеть основание магнитного крепления 9 в собранном виде на инструмент, затянуть винты 114 и присоединить собранную ответную часть магнитного крепления 9 с установленной рамкой со сферическими отражателями 6.
Для определения положения кончика и ориентации медицинского инструмента 3 относительно установленной на нем рамки со сферическими отражателями 6, требуется провести калибровку положения кончика и ориентации оси медицинского инструмента. Калибровка положения кончика инструмента происходит с использованием референсной рамки со сферическими отражателями 7. Калибровка оси ориентации медицинского инструмента 3 происходит на специальной калибровочной установке, конструкция которой представлена на фиг. 20. Процесс калибровки ориентации оси медицинского инструмента 3 начинается с установки медицинского инструмента 3 ровной цилиндрической поверхностью на губки неподвижного основания калибровочной установки 127, далее по той же ровной цилиндрической поверхности перемещается подвижная ручка 128 с установленной на ней рамкой со сферическими отражателями 6 с записью измеренных координат ее положения. Основание калибровочной установки 127 неподвижно закреплено на рельсе 48 или другом ровном и неподвижном объекте в области видимости стереофотограмметрической системы 5, посредством винтов 129 и гаек 130. Детали калибровочной установки производятся аддитивным методом из биоинертной и автоклавируемой пластмассы. Элементы крепежа из нержавеющей стали.
В качестве крепления, которое устанавливается на костные структуры пациента и позволяет улучшить качество навигации по положению за счет компенсации перемещения позвонка при проведении хирургических манипуляций по введению хирургических метчиков и транспедикулярных винтов, применяется упругое магнитное крепление (см. фиг. 21). Основой изделия служит упругое крепление 131 из листовой нержавеющей стали, на нем вырезаны последовательные острые зубцы, для жесткого закрепления к остистому отростку и отверстия для инициализации позвонка игловым щупом с магнитным креплением 12. Принцип фиксации основывается на упругих свойствах материала крепления, что ограничивает силу зажатия и исключает возможность повреждения остистого отростка позвонка. Раздвижение губок крепления происходит надавливанием пальцами на ручки 132. На крепление 131 устанавливается специальная магнитная рамка со сферическими отражателями 133, в специальное углубление которой помещается магнит 113 и закрывается крышкой 134. Удержание специальной магнитной рамки 133 происходит посредством ответной части магнитного крепления 135, в углублении которого также помещается магнит 113 и закрывается крышкой 136. Фиксация крышек происходит посредством гаек 137 и винтов 138. Детали специальной магнитной рамки производятся аддитивным методом из биоинертной и автоклавируемой пластмассы. Элементы крепежа из нержавеющей стали.
Работа экспертной системы обеспечивается взаимодействием всех описанных медицинских инструментов, изделий и устройств, взаимосвязь которых обеспечивается способами их применения и программным обеспечением экспертной системы. Алгоритм проведения операции по транспедикулярной фиксации с применением экспертной системы, на базе медицинского манипуляционного робота, строго регламентирован и разделен на три этапа: предоперационный этап по подготовке данных пациента (см. фиг. 22), предоперационный этап по подготовке медицинских инструментов, изделий и устройств (см. фиг. 23), и интраоперационный этап проведения операции по транспедикулярной фиксации позвоночника с применением экспертной системы (см. фиг. 24).
Предоперационный этап подготовки данных пациента для проведения хирургических манипуляций по транспедикулярной фиксации позвоночника с применением экспертной системы на базе медицинского манипуляционного робота проводится на главном управляющем компьютере 74 в программном обеспечении экспертной системы и включает в себя следующие шаги (см. фиг. 22): подготовка данных пациента для обеспечения навигации, включающая в себя сегментацию позвонков 139 и экспорт полученных трехмерных моделей 140 из данных КТ пациента, внесение (для текстовых) и загрузка (для файловых) данных пациента в программное обеспечение экспертной системы 141. Далее проводится разметка поверхностей на трехмерных моделях позвонков 143 и планирование траектории и глубины введения транспедикулярных винтов в позвонки 142 в специальных вкладках программного обеспечения экспертной системы.
Алгоритм предоперационного этапа подготовки медицинских инструментов, изделий и устройств для проведения хирургических манипуляций по транспедикулярной фиксации позвоночника с применением экспертной системы на базе медицинского манипуляционного робота показан на фиг. 23. В первую очередь происходит стерилизация медицинских инструментов и изделий 144, исключая многофункциональное беспроводное устройство 14 и медицинский манипуляционный робот 1, их стерильность обеспечивается изолирующими медицинскими чехлами. Далее проводится сборка и установка оборудования 145, необходимого для работы экспертной системы, данный этап включает в себя сборку, в условиях стерильности, медицинских инструментов 3 для использования с рабочим органом 2, магнитных креплений 9, упругого магнитного крепления 8, иглового щупа с магнитным креплением 12 и калибровочной установки, а также запуск стойки управления 4 и многофункционального беспроводного устройства 14. Далее следует калибровка положения кончика каждого медицинского инструмента и иглового щупа с магнитным креплением 146, и валидация результатов калибровки 147. Если результат калибровки, представляющий собой оценку погрешности определения координат кончика медицинского инструмента, оцениваемый в процессе валидации превышает порог допустимого значения, необходимо повторное проведение калибровки положения кончика инструмента. После успешной калибровки положения кончика, проводится калибровка ориентации осей медицинских инструментов 148 и валидация результатов 149. При валидации происходит оценка погрешности определения ориентации оси медицинского инструмента 3, при превышении определенного порогового значения, результаты калибровки признаются неудовлетворительными и калибровку следует провести заново. После проведения всех подготовительных процедур, связанных с медицинскими инструментами 3, начинается подготовка медицинского манипуляционного робота 150, заключающаяся в установке на операционный стол 13 и надевании изолирующего медицинского чехла. Поверх чехла на выходной фланец медицинского манипуляционного робота 1 устанавливается собранный рабочий орган 151, и фиксируется рамка со сферическими отражателями 152 в удобном для хирурга положении. Заключительным этапом подготовки медицинского манипуляционного робота 1 является инициализация оси рабочего органа 153, необходимая для определения положения его оси относительно положения рамки со сферическими отражателями 6, установленной на рабочем органе 2, далее проводится валидация результатов инициализации 154.
Варианты проведения операции по транспедикулярной фиксации могут различаться, в зависимости от номеров позвонков, в которые вкручиваются транспедикулярные винты, последовательности их введения, по составу, параметрам и очередность применяемых медицинских инструментов. Такие параметры операции устанавливаются хирургом и не контролируются экспертной системой. Все предоперационные медицинские манипуляции, связанные с подготовкой пациента, обеспечения доступа к позвонкам и т.п.также не требуют применения экспертной системы. Областью применения экспертной системы во время проведения операции по транспедикулярной фиксации позвоночника являются хирургические манипуляции с тканями позвонков по созданию направляющего канала, посредством хирургического шила 97, нарезания резьбы в канале хирургическим метчиком 96 и введению транспедикулярного винта в позвонок, посредством использования транспедикулярной отвертки 95, и дополнительные действия для обеспечения экспертного контроля за ходом выполнения хирургических манипуляций. Алгоритм интраоперационного этапа применения экспертной системы на базе медицинского манипуляционного робота представлен на фиг. 24. Сначала хирург выбирает позвонок в интерфейсе 155 на экране очков смешанной реальности 10. На остистый отросток позвонка, который выбран для проведения хирургических манипуляций, устанавливается 156 упругое магнитное крепление 8, далее происходит инициализация позвонка 157, посредством измерения координат точек поверхностей позвонка игловым щупом 12. В программном обеспечении экспертной системы происходит валидация результатов инициализации позвонка 158. Так как один позвонок включает в себя две траектории введения транспедикулярных винтов, до начала проведения хирургических манипуляций необходимо выбрать сторону позвонка 159 в интерфейсе на экране очков смешанной реальности 10. После этого медицинский манипуляционный робот 1 начинает движение для совмещения оси рабочего органа 2 с запланированной в программном обеспечении траекторией введения транспедикулярного винта 160. После полной остановки рабочего органа 2 хирург проводит все необходимые хирургические манипуляции по подготовке отверстия в позвонке и введению транспедикулярного винта 161. Далее по регламенту проведения транспедикулярной фиксации необходимо сменить сторону позвонка, либо сам позвонок 162, и повторить алгоритм до введения всех запланированных транспедикулярных винтов 163.
Программное обеспечение экспертной системы состоит из набора взаимосвязанных и последовательно применяемых модулей. Модуль пользовательского интерфейса экспертной системы предназначен для управления сеансом операции. Программное обеспечение позволяет подготовить данные пациента, выполнить предоперационное планирование и управлять другими программными модулями системы во время проведения операции. Пример осуществления пользовательского интерфейса программного обеспечения представлен одним окном, разделенным на несколько вкладок.
Процесс преодоперационной подготовки экспертной системы начинается с загрузки данных пациента 141 во вкладке редактирования данных пациента в программном обеспечении экспертной системы (см. фиг. 25). Программное обеспечение хранит все данные операционной сессии в специальной информационной структуре, описывающей пациента и необходимые данные для проведения операции. Вкладка данных пациента вертикально поделена на две области: в нижней части пользователь может редактировать данные пациента, а в верхней отображается трехмерная объединенная модель DICOM снимков пациента. Для корректной работы приложения положение и ориентация трехмерной модели позвонка должны соответствовать положению и ориентации данного позвонка в DICOM снимке. При необходимости пользователь может вывести дополнительные окна визуализации в верхней части вкладки. По мере добавления DICOM снимков они будут отображаться в верхнем окне. Для получения изображения позвонков используется техника объемного рендеринга. Входными данными для объемной визуализации является трехмерный массив данных. Результатом объемного рендеринга является двухмерное изображения трехмерного вексельной модели. Воксельная модель разбивает весь объем трехмерного изображения на ячейки - воксели, создавая трехмерный растр. Для формирования изображения из точки наблюдения пускаются лучи, которые, проходя через вексельную модель позволяют вычислить значения пикселей итогового изображения. Для выбора точек вдоль пущенного луча используется уравнение прямой. Для вычисления плотности в выбранной точке используется трилинейная интерполяция, т.к. точки на луче не будут совпадать с узлами сетки трехмерного массива данных. После выбора точки и определения ее плотности необходимо перевести это значение в параметры пикселя: цвет и прозрачность. Такое преобразование выполняется при помощи передаточных функций (transfer function). Пользователь может изменить параметры передаточной функции в окне «Transfer function editor», которое доступно в приложении для каждого отображаемого DICOM. Параметры передаточных функций определяют какие структуры будут отображены и каким цветом. Для задания передаточной функции используются набор точек, каждой из которых соответствует пороговое значение для плотности и соответствующее им значение плотности и цвета. Количество точек не ограничено, параметры в областях между точками вычисляются при помощи линейной интерполяции. Дополнительно, в окне задания передаточной функции выводится гистограмма. Гистограмма позволяет оценить диапазон значений трехмерного массива данных, а также степень присутствия тех, или иных структур. Подобный способ задания передаточной функции позволяет гибко задавать выводимые на экран структуры и их визуальное представление.
Далее, в рамках подготовки к проведению хирургических манипуляций по транспедикулярной фиксации позвоночника с применением, в программном обеспечении экспертной системы размечаются поверхности трехмерной модели позвонка 142, которые впоследствии будут использоваться для инициализации позвонка 157. Вкладка разметки поверхностей трехмерных моделей позвонков в программном обеспечении экспертной системы показана на фиг. 26. Окно поделено на две зоны: слева - панель действий, справа -визуализация выбранной трехмерной модели позвонка. Позвонок можно выбрать в выпадающем списке панели действий. После выбора модели позвонка, она отобразится в окне справа. Для выбранного позвонка будут автоматически загружены сохраненные ранее данные о разметке поверхностей. Каждая зона имеет уникальную цветовую индикацию в панели действий и при размещении на модели. Пользователь может выбрать активную зону, нажав на кнопку соответствующего цвета в панели действий. Разметка поверхности осуществляется при помощи курсора мыши. При помещении на трехмерную модель курсор размечает прилегающую поверхность в определенном радиусе, либо удаляет разметку соответствующей поверхности, в зависимости от режима, установленного на панели действий. Смена режима (добавление/удаление) осуществляется нажатием кнопки «Add/Rem». Для быстрой очистки всех выделенных поверхностей пользователь может использовать кнопку «Clear surfaces». Во время редактирования возможно перемещать камеру при помощи мыши, возвращение камеры в исходное положение происходит нажатием кнопки «Focus view». Размеченные поверхности на трехмерной модели позвонка могут перекрывать друг друга. Приоритет отображения имеет поверхности с меньшим номером. При необходимости можно скрыть отображение зоны сняв выделение с флага зоны на панели действий. Для завершения разметки поверхностей трехмерных моделей необходимо нажать на кнопку «Save» чтобы сохранить данные размеченных поверхностей. Данные сохраняются в каталоге выбранного пациента.
Завершающим этап предоперационной подготовки данных пациента в программном обеспечении экспертной системы является планирование траектории и глубины введения транспедикулярного винта на трехмерной модели позвонка 143 (см. фиг. 27). Процесс планирования траектории заключается в перемещении двух точек на продольной оси трехмерной модели транспедикулярного винта, однозначно задающих его положение и ориентацию относительно трехмерной модели позвонка. Точка входа 164 задается на поверхности позвонка и характеризует ориентацию оси транспедикулярного винта и положение точки ввода инструмента в позвонок. Целевая точка 165 задается в теле позвонка и характеризует положение кончика транспедикулярного винта внутри позвонка. В левой части вкладки «Планирование траектории» расположена панель с дополнительными инструментами. Центральную часть окна занимает окно визуализации со свободной камерой. В правой верхней части располагается окно визуализации с разрезом в фронтальной плоскости, позвонок всегда разрезается по оси винта, ориентация среза всегда перпендикулярно направлению взора камеры. В правой нижней части располагается окно визуализации в горизонтальной области проекции, направление взора камеры соответствует оси винта, расположение плоскости среза можно изменить при помощи ползунка «SlicePos», расположенного в нижнем левом углу окна. Перед создания плана необходимо выбрать позвонок, для которого этот план будет предназначен. Трехмерная модель выбранного позвонка и последний сохраненный план отобразится в центральном окне визуализации. Имеется возможность перемещать камеру в центральном окне также, как и в других окнах приложения со свободной камерой. Помимо трехмерной модели позвонка в центральном виде есть перемещаемая плоскость, срезающая часть позвонка для отображения внутренней структуры. Пользователь может перемещать плоскость наводя на нее указатель мыши, зажимая левую кнопку и перетаскивая по окну вида. Для задания точек пользователю необходимо нажать клавишу мыши в выбранной точке с зажатой кнопкой «Shift»: левая кнопка мыши задает точку входа 164, правая кнопка мыши целевую точку 165. Для уточнения положения траектории используются элементы управления, отображаемые в точках отрезка траектории. Элементы управления на концах отрезка позволяют перемещать целевую точку 165 и точку входа 164 по одной или нескольким осям в мировой системе координат. Элемент управления по центру отрезка позволяет перемещать обе точки одновременно в зависимости от ориентации отрезка. Во время изменения положения отрезка траектории проекции на виде справа будут пересчитываться, что позволяет визуально оценить расстояние от внешней поверхности транспедикулярного винта до внешнего кортикального слоя позвонка. Элемент управления, расположенный в центре отрезка траектории позволяет удобно управлять глубиной введения винта и смещать его, не изменяя ориентации. Виды в правой части окна позволяют оценить расстояния до края кости в различных проекциях. Пользователь может перемещать камеру на правом верхнем виде вокруг винта, оценивая расстояния в различных проекциях. На правом нижнем виде положение камеры всегда соответствует траектории введения - камера направлена на винт из целевой точки 165 в точку введения 164. При помощи левой кнопки мыши на данном виде возможно перемещать целевую точку 165. После выбора подходящих точек расположения винта необходимо нажать кнопку сохранения плана. Данные плана сохраняются в каталог пациента.
Результаты проведенных, до текущего момента, этапов подготовки данных пациента, в программном обеспечении экспертной системы, сохраняются в каталоге пациента и могут быть загружены в любой момент времени. Все описываемые далее этапы подготовки экспертной системы, происходят в операционной, непосредственно перед проведением операции. После успешного запуска программного обеспечения на главном управляющем компьютере 74 в стойке управления 4, загрузки данных пациента 140, с уже запланированными поверхностями 142 и траекториями введения транспедикулярных винтов 143 и сборки всех медицинских инструментов 145, происходит калибровка положения кончика медицинского инструмента, которая проводится вручную, сопровождаемая визуальными и звуковыми инструкциями во вкладке «Подготовка инструмента» в программном обеспечении экспертной системы (см. фиг. 28). Верхняя часть вкладки содержит визуальное представление процесса калибровки положения кончика медицинского инструмента. Также в этой же вкладке, но следующим этапом, происходит калибровка ориентации оси медицинского инструмента и валидация (см. фиг. 29). Левая часть вкладки содержит граф, в котором хранится информация о положении и ориентации инструментов. Пользователь может выбрать нужный инструмент, потом вид манипуляции: калибровка или валидация. После запуска процедуры в окне отображения будет визуализироваться расположение трехмерной модели инструмента, трехмерной модели рамки со сферическими отражателями, дополнительными элементами визуализации, численные и текстовые значения результатов проводимой калибровки.
Вкладка «Виртуальная сцена» демонстрирует общий вид с расположением всех моделей инструментов и изделий в единой системе координат и служит для визуализации операционного поля во время выполнения операции (см. фиг. 30). Основное назначение данной вкладки - визуальная оценка расположения позвонков, стержней и инструментов во время проведения хирургических манипуляций по транспедикулярной фиксации позвоночника.
Вкладка «Планирование стержней» в программном обеспечении экспертной системы (см. фиг. 31) служит для планирования положения стержней относительно вкрученных транспедикулярных винтов. Вкладка содержит окно для визуализации трехмерной сцены и элементы управления для различных режимов работы. В режиме планирования положения позвонков и стержней в левой части вкладки выводится граф, в котором хранится информация о положении и ориентации позвонков, а в окне визуализации отображается запланированное положение позвонков, винтов и стержней. Итоговое положение позвонков и винтов сохраняется в каталоге пациента.
Способ навигации медицинских инструментов 3 и рабочего органа 2 медицинского манипуляционного робота 1 представляет собой совокупность способов, применяющих изделия и устройства, входящих в состав экспертной системы, которые при объединении позволяют проводить экспертный контроль за ходом проведения хирургических манипуляций во время проведения операций. В способ навигации медицинских инструментов и рабочего органа медицинского манипуляционного робота входят следующие способы:
• Способ последовательного перемещения осей медицинского манипуляционного робота по сигналам с 6-ти компонентного силомоментного датчика.
• Способ планирования траектории и глубины введения транспедикулярного винта в педикулу позвонка пациента.
• Способ инициализации позвонка игловым щупом с магнитными креплениями для сопоставления поверхностей трехмерной модели позвонка и положения реального позвонка в навигационной стереофотограмметрической системе.
• Способ инициализация рабочего органа медицинского манипуляционного робота посредством использования иглового щупа с магнитными креплениями для определения положения и ориентации его оси в навигационной стереофотограмметрической системе.
• Способ безопасного останова рабочего органа медицинского манипуляционного робота.
• Способ применения многофункционального беспроводного устройства в рамках экспертной функции для ограничения хода медицинских инструментов по силомоментным данным.
Способ последовательного перемещения осей медицинского манипуляционного робота по сигналам с 6-ти компонентного силомоментного датчика. Перемещение рабочего органа 2 происходит последовательным включением осей медицинского манипуляционного робота 1, посредством блока переключения осей 75. Задание движения рабочего органа 2 медицинского манипуляционного робота 1, заключается в приложении силы к ручке рабочего органа 107 (см. фиг. 32), детектирование которой происходит посредством 6-ти компонентного датчика сил и крутящих моментов 72, установленного на выходном фланце 73 медицинского манипуляционного робота 1. Крутящий момент движения (Мдв) рассчитывается на основании значений расстояния от ручки 107 до 6-ти компонентного датчика сил и крутящих моментов 72 (h1) и расстояния от ручки 107 до оси медицинского манипуляционного робота (h2). Движение рабочего органа начинается 166 при превышении порогового значения крутящего момента (Мпорог) и заканчивается 167 при достижении величины крутящего момента меньше порогового значения (Мпорог).
Способ планирования траектории и глубины введения транспедикулярного винта в педикулу позвонка пациента, заключается в размещении трехмерной модели транспедикулярного винта в трехмерной модели позвонка в программном обеспечении экспертной системы, как показано на фигуре 27, это необходимо для определения координат точки входа 164 и целевой точки 165. Наведение наведения рабочего органа 2 медицинского манипуляционного робота 1, заключается в совмещении его оси, которая описывается координатами входной 168 и выходной 169 точками, и траектории введения медицинских инструментов 3, описываемая точкой входа 164 и целевой точкой 165 (см. фиг. 34). При наведении в поле зрения стереофотограмметрический системы 5 должны быть рамка со сферическими отражателями 6, установленная на рабочем органе 2 медицинского манипуляционного робота 1, рамка со сферическими отражателями 6 на упругом магнитном креплении 8, установленном на остистом отростке позвонка, на котором в данный момент проводятся хирургические манипуляции по введению медицинских инструментов 3, а также неподвижная референсная рамка со сферическими отражателями 7. Для наведения рабочего органа 2 на запланированную траекторию необходимо провести инициализацию рабочего органа 153 и позвонка 157, посредством иглового щупа с магнитным креплением 12.
Способ инициализации позвонка посредством использования иглового щупа с магнитными креплениями для сопоставления поверхностей трехмерной модели позвонка и положения реального позвонка в навигационной стереофотограмметрической системе заключается в последовательной записи координат точек поверхностей позвонка, к которым прикладывается кончик одноразовой медицинской иглы 126, установленной в игловом щупе с магнитным креплением 12 (см. фиг. 35). Инициализация позвонка проводится для определения координат точки входа 164 и целевой точки 165 запланированной траектории на трехмерной модели позвонка 143 в стереофотограмметрической системе 5. Поверхности позвонка и количество точек на поверхностях задается на предоперационном этапе в программном обеспечении экспертной системы во вкладке подготовки поверхностей 142 (см. фиг. 26).
Процесс инициализации позвонка начинается по нажатию кнопки 170 в меню пользователя на экране очков смешанной реальности 10 и сообщается хирургу специальным звуковым сигналом 171 из динамика 84 стойки управления 4 (см. фиг. 36). Далее хирург перемещает кончик иглового щупа с магнитным креплением 12 в любую удобную точку на запланированной поверхности позвонка 172, происходит оценка расстояния до предыдущей записанной точки 173, для того чтобы исключить запись координат близко находящихся точек поверхности, что ухудшит качество работы математического алгоритма сопоставления. Условием записи координат точки является неподвижность кончика углового щупа с магнитным креплением 12 на поверхности позвонка в течении заданного времени 174, при успешной записи координат точки 175 включается специальный звуковой сигнал 176, для оповещения хирурга о необходимости перехода к следующей точке. В программное обеспечение встроен счетчик точек по поверхностям 177 на одной поверхности, который инициирует звуковой сигнал 178 об успешной записи всех точек на текущей поверхности, что означает необходимость перехода на следующую поверхность. При записи координат всего запланированного количества точек на всех запланированных поверхностях позвонка 179, происходит уведомление хирурга о завершении процесса сбора точек, посредством специального звукового сигнала 180. Далее происходит сопоставление поверхности трехмерной модели и измеренные координаты точек поверхностей позвонка, посредством математического алгоритма, реализованного в программном обеспечении экспертной системы 181.
Алгоритм сопоставления измеренных точек позвонка с поверхностями его трехмерной модели для определения положения позвонка относительно референсной рамки в качестве входных данных получает два набора данных: наборы точек, разбитые по группам и наборы поверхностей, представленные в виде треугольников, также разбитые по группам. В качестве выходных данных выступает шесть параметров, описывающих положение модели позвонка, и сравнительный параметр оценки ошибки.
Наборы точек представлены списком из групп точек. Каждая группа также является списком, в которую входят структуры, описывающие трехмерные вектора - сущности с полями х, у и z, представленными числами с плавающей запятой по стандарту IEEE 754. Поля х, у и z описывают соответствующие проекции вектора на оси X, Y и Z.
Наборы поверхностей представлены списком из поверхностей. Каждая поверхность описывается списком треугольников. Каждый треугольник, в свою очередь, представлен тройкой векторов.
Положение модели позвонка представляется в виде шести чисел: х, у, z, а, b и с. Значения х, у и z описывают перемещение модели относительно эталонного положения по осям X, Y и Z в миллиметрах. Значения a, b и с задают последовательные повороты модели позвонка относительно эталонного положения вокруг осей Z, Y, X, проходящих через нулевую точку смещенной модели.
Цель работы алгоритма - нахождение таких х, у, z, а, b и с, что при смещении модели позвонка в виртуальном пространстве относительно эталонного положения модели позвонка относительно нуля виртуального пространства совпадает с положением реального позвонка относительно референсной рамки. Это достигается за счет нахождения х, у, z, а, b и с приводящих к помещению измеренных точек на размеченные поверхности.
Работу алгоритма можно разделить на несколько этапов. На первом этапе происходит предварительная подготовка данных. Производится нахождение центра наборов точек 
где:
• n - суммарное число точек во всех группах точек;
• - положение i-той точки.
- положение i-той точки.
Помимо этого, производится нахождение центра параллельного осям ограничивающего поверхности параллелепипеда 
где:
• А - индекс составляющей вектора, принимает значение X, Y или Z;
• - наибольшее значение А составляющей векторов поверхностей;
- наибольшее значение А составляющей векторов поверхностей;
• - наименьшее значение А составляющей векторов поверхностей.
- наименьшее значение А составляющей векторов поверхностей.
На втором этапе производится поиск значения набора параметров s, обеспечивающего близкое к оптимальному положение наборов точек относительно соответствующих поверхностей. Для оценки положения наборов точек относительно соответствующих поверхностей используется следующий метод оценки:
где:
• n - суммарное число точек во всех группах точек;
• Di(s) - оценка отклонения, которая задается как:
Di(s)=min(Tij(s))
где min(Tij(s)) - минимум квадрата расстояния от i-той точки до соответствующей поверхности. Минимум квадрата расстояния от i-той точки до соответствующей поверхности определяется как минимум из квадратов расстояния от i-той точки до треугольников соответствующей поверхности. Квадрат расстояния от i-той точки до j-того треугольника поверхности определяется как:
где  - дельта-вектор между i-той точкой
- дельта-вектор между i-той точкой  и ближайшей к ней точкой
и ближайшей к ней точкой  на поверхности j-того треугольника.
на поверхности j-того треугольника.
Положение i-той точки  определяется следующим образом:
определяется следующим образом:
где  - функция преобразования точки:
- функция преобразования точки:
где  - функция поворота точки:
- функция поворота точки:
где:
Поиск оптимального значения s производится с помощью численного поискового алгоритма Нелдера-Мида. В качестве начальных параметров для поиска используются автоматически генерируемые значения s:
Полученные после работы алгоритма Нелдера-Мида оптимальные значения s используются для последующего расчета выходных параметров. Значения х, у и z определяются как:
где Finv определена как
Значения а, b и с определяются следующим образом:
где:
Полученные значения х, у, z, а, b и с могут быть использованы для определения положения позвонка относительно неподвижной референсной рамки со сферическими отражателями.
В результате сопоставления данные о положении входной 164 и целевой 165 точек запланированной траектории введения медицинских инструментов на трехмерной модели позвонка, преобразуются в положение входной 164 и целевой 165 точек на реальном позвонке, относительно стереофотограмметрической системы 5. Результаты сопоставления выводятся на экран очков смешанной реальности 182.
При математическом расчете происходит оценка среднеквадратического отклонения результатов сопоставления, по величине которой происходит валидация результатов инициализации 158, при превышении допустимой величины среднеквадратического отклонения, результаты считаются неудовлетворительными и процесс инициализации позвонка пациента следует повторить.
Способ инициализации рабочего органа 2 медицинского манипуляционного робота 1, посредством использования иглового щупа с магнитными креплениями для определения положения и ориентации оси рабочего органа 2 медицинского манипуляционного робота 1 в навигационной стереофотограмметрической системе, заключается в прикладывании кончика иглового щупа с магнитным креплением 12 к специальным лункам 170 на поверхности основания рабочего органа 2 (см. фиг. 37). Лунки 170 (количество которых составляет 17 штук) спроектированы таким образом, чтобы добиться точного позиционирования кончика иглового щупа с магнитным креплением 12.
Процесс инициализации рабочего органа 2 начинается по нажатию кнопки в меню пользователя на экране очков смешанной реальности 184 (см. фиг. 38), начало процесса сопровождается специальным звуковым сигналом 171 из динамика 84 стойки управления 4. Далее хирург перемещает кончик иглового щупа 12 в любую лунку 170 на поверхности рабочего органа 185. Запись точки происходит при неподвижном удержании кончика углового щупа в лунке 170 рабочего органа 174 заданное время, при соблюдении данного условия произойдет запись координат точки 175 поверхности рабочего органа 2 и следующей за ней специальный звуковой сигнал 176, для оповещения хирурга о необходимости перехода к следующей точке. После записи координат необходимого количества точек 179 на поверхности рабочего органа, происходит оповещающий звуковой сигнал о завершении процесса 180. Далее происходит расчет ориентации оси рабочего органа 2 медицинского манипуляционного робота 1 в программном обеспечении с выводом результатов на экран очков смешанной реальности 186. При математическом расчете также происходит оценка среднеквадратического отклонения результатов инициализации рабочего органа, по величине которой происходит валидация результатов инициализации 187, при превышении определенного порога величины среднеквадратического отклонения, результаты считаются неудовлетворительными и процесс инициализации рабочего органа следует повторить, до достижения необходимой величины среднеквадратического отклонения.
По результатам инициализации позвонка (см. фиг. 35-36) и рабочего органа (см. фиг. 37-38) в программном обеспечении экспертной системе записываются данные о положении входной 168 и выходной 169 точек оси рабочего органа 2 и входной 164 и целевой 165 точек запланированной траектории введения медицинских инструментов 3 относительно стереофотограмметрической системы 5, что позволяет осуществить их совмещение и наведение медицинских инструментов 3. Наведение медицинского инструмента 3 происходит в ручном режиме, посредством способов, показанных на фиг. 32 и фиг. 33, с последовательным перемещением осей медицинского манипуляционного робота 1.
Для обеспечения способа безопасного останова в конструкцию медицинского манипуляционного робота 1 установлены управляемые тормозные устройства 39 нормально замкнутого типа, которые выключается только во время непосредственной работы задействованной оси медицинского манипуляционного робота 1. Безопасный останов является важным элементом в медицинском манипуляционном роботе 1, т.к. речь идет о хирургических манипуляциях, которые могут привести к серьезным последствиям при неправильном его функционировании. Его цель - предотвратить нежелательные последствия, которые могут возникнуть в случае неожиданной ошибки или аварии во время выполнения операции. Возникновение непредвиденных ситуаций, таких как полное отключение питания, приведет к фиксации всех степеней подвижности манипулятора в текущей конфигурации с минимальной задержкой по времени, не превышающей 200 мс, что не позволит роботу нанести вред пациенту (см. фиг. 39). Также данный тип тормозных устройств 39 имеет возможность плавного изменения момента торможения в зависимости от величины подающегося напряжения, что может использоваться как в процессе перемещения рабочего органа для получения тактильной отдачи, так и для увеличения срока эксплуатации медицинского манипуляционного робота, т.к. полностью исключатся ударные нагрузки на внутренние компоненты узла за исключением описанных выше случаев экстренного останова системы.
После завершения совмещения оси рабочего органа 2 и запланированной траектории, начинается непосредственное проведение хирургических манипуляций по транспедикулярной фиксации позвоночника. Основным направляющим и навигируемым элементом экспертной системы на данном этапе является рабочий орган 2. Принцип работы рабочего органа 2 на базе двухсоставной втулки заключается в малой величине трения между основанием 98 (нержавеющая сталь) и втулкой 99 (фторопласт-4). Точное позиционирование медицинского инструмента обеспечивается допусками при изготовлении деталей. Способ применения рабочего органа 2 заключается в перемещении медицинского инструмента с установленной на него втулкой 99 в отверстие основания 98, как показано на фиг. 40 (а). Далее медицинский инструмент 3 перемещается вдоль оси рабочего органа 2 до совмещения поверхности ограничивающего бортика втулки 99 и поперечной поверхности основания 98, как показано на фиг. 40 (б).
Имеется возможность применения экспертной системы с обыкновенной медицинской ручкой 188, как показано на фиг. 41 (а), но в данном случае будет отсутствовать экспертный контроль за ходом проведения хирургической манипуляции по силомоментным данным. Для обеспечения контроля по силомоментным данным, в рамках экспертной системы, применяется многофункциональное беспроводное устройство 14. Такой контроль обеспечивается посредством измерения, обработки и передачи данных о крутящем моменте, действующем на кромку медицинского инструмента, вдоль продольной оси, в зависимости от глубины захода медицинского инструмента в материал, на основе данных об угловом перемещении. Способ установки в рабочий орган 2 медицинского манипуляционного робота 1 многофункционального беспроводного устройства 14 показан на фиг. 41 (б).
Способ осуществления экспертной функции для ограничения хода медицинских инструментов по силомоментным данным и контроля над ходом выполнения хирургической манипуляции по закручиванию транспедикулярных винтов и хирургических метчиков показан на фиг. 42 в виде алгоритма. Ввод граничных функциональных условий экспертной системы происходит в предоперационном режиме или непосредственно перед операцией в программном обеспечении экспертной системы 189. В начале хирургической манипуляции запускается цикл работы экспертной системы 190. Полученные данные с многофункционального беспроводного устройства 14 обрабатываются по алгоритму 191 для построения зависимости крутящего момента от глубины захода медицинского инструмента 3. В первую очередь происходит проверка величины крутящего момента относительно ограничивающих параметров 192, при превышении ограничения, происходит визуальное предупреждение, посредством изменения цвета окна и вывода сообщения в интерфейс на экране очков смешанной реальности 10, а так же звуковой предупреждающий сигнал, посредством динамика 84 в стойке управления 4. Далее проводится проверка текущей глубины захода медицинского инструмента 194, при превышении допустимого значения глубины, которое равно длине транспедикулярного винта, запускается визуальное и звуковой предупреждающий сигнал 195. При успешной пройденной проверки по крутящему моменту и глубине захода медицинского инструмента, проводится математический расчет методом наименьших квадратов для определения средней линии 196. Параметры полученной средней линии сравниваются с граничными функциональными условиями экспертной системы 197. При выходе за диапазон допустимых значений экспертной функции ограничения выводится визуальное требования по останову хода выполнения хирургической манипуляции и звуковой сигнал 198. По окончании хирургической манипуляции, ход которой отслеживается по данным крутящего момента, экспертная система отключается 199. Собранные данные записываются в базу данных 200, при необходимости имеется возможность вывода полученных при проведении хирургической манипуляции данных на экран монитора 201.
Экспертный контроль за ходом выполняемой хирургической манипуляции основывается на анализе зависимости крутящего момента от глубины захода медицинского инструмента 191, как показано на фиг. 43. При вкручивании транспедикулярных винтов и хирургических метчиков в позвонок диапазон изменения крутящего момента должен оставаться в пределах граничных функциональных условий 189, которые заданы хирургом в программном обеспечении экспертной системы. Выход за установленные ограничения хода медицинских инструментов по силомоментным данным 193 и 195 являются потенциально опасными ситуациями при проведении хирургической манипуляции, детектируются экспертной системой и выводятся останавливающие визуальные и звуковые сообщения для хирурга, которые жестко запрещают дальнейший ход выполнения хирургической манипуляции.
Для управления программным обеспечением экспертной системы основным элементом интерфейса управления, выводимым на экран очков смешанной реальности 10 является меню пользователя 202, представленное на фиг. 44 (а), данное меню возможно неподвижно закрепить на экране 203. Основными элементами меню являются: кнопка выбора следующего винта в текущем позвонке 204, кнопка переключения медицинского инструмента 205, поле вывода наименования текущего медицинского инструмента 206, кнопка переключения позвонка 207, поле вывода номера текущего позвонка 208, кнопка переключения в программном обеспечении на вкладку с разметкой поверхностей 209, кнопка переключения в программном обеспечении на вкладку с виртуальной сценой операционной 210, кнопку удаления точки при инициализации позвонка 211, кнопку начала процесса инициализации позвонка/рабочего органа 212, поле вывода результатов валидации инициализации позвонка/рабочего органа 213. Трансляция на экран значений экспертной функции для ограничения хода медицинских инструментов по силомоментным данным представлена на фиг. 44 (б), состоит из двух осей, отображающих: глубину захода медицинского инструмента 214 и крутящего момента, действующий на медицинский инструмент 215. В рамках этого графика выводится зависимость крутящего момента от глубины захода медицинского инструмента при проведении хирургической манипуляции 216, рассчитываемая средняя линия 217, граничные функциональные условия в виде линий 218. При выходе за пределы заданных значений экспертной функции для ограничения хода медицинских инструментов 193 и глубины захода 195 экран вывода становится красным и проигрывается специальный звуковой сигнал для останова. При выходе за пределы заданных граничных функциональных условий по параметрам средней линии 198 экран вывода также становится красным и проигрывается специальный звуковой сигнал для останова. Для обеспечения экспертной функции контроля над ходом выполнения хирургической манипуляции по положению и ориентации медицинских инструментов 3, на экран очков смешанной реальности 10 выводится комплекс навигационных элементов в виде мишени и стержня, которые позволяют наводить медицинские инструменты по положению и ориентации относительно запланированной траектории. Для наведения по ориентации имеется мишень 219, представленная на фиг. 44 (в), которая изменяет цвет в зависимости от углового расстояния до запланированной траектории введения медицинских инструментов 3, как показано на фиг. 44 (г). Наведение по ориентации заключается в визуальном совмещении центрального стержня 220, имитирующего ориентацию запланированной траектории, и трехмерных колец грубого 221 и точного 222 наведения, имитирующих ориентацию медицинского инструмента. Навигация по положению происходит посредством совмещения креста грубого 223 и точного 224 наведения, имитирующих положение медицинского инструмента, с неподвижным центральным крестом 225, имитирующим запланированную точку входа 164 в позвонок.
Оценка глубины захода медицинского инструмента относительно целевой точки происходит посредством ползунка 226, передвигающегося по стержню, в зависимости от расстояния кончика медицинского инструмента 3 до целевой точки 165. Дополнительно, выводятся численные данные о расстоянии между кончиком медицинского инструмента 3, определяемого стереофотограмметрической системой 5, до запланированной траектории 227 и расстояние до целевой точки введения медицинского инструмента 228. В качестве отдельного элемента на экран очков смешанной реальности 10 выводится трехмерная модель позвонка 229, как показано на фиг. 35 (д), вызываемая при процессе инициализации позвонка, с отмеченной цветом текущей поверхностью для измерения координат точек 230.
Примером, показывающим работоспособность системы, является собранный и функционирующий медицинский манипуляционный робот 1 с блоком переключения осей 75, как показано на фиг. 45. На фиг. 46 показана ось 56 медицинского манипуляционного робота 1 в сборе. На фиг. 46 (а) представлены очки смешанной реальности 10, под которые было написано программное обеспечение с выводом элементов интерфейса, представленных на фиг. 44. Пример отображения на экране очков смешанной реальности 10 интерфейса для навигации по положению и ориентации, а также экспертная функция ограничения хода выполнения хирургической манипуляции по силомоментным данным показан на фиг. 47 (б).
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональное устройство со сменными хирургическими инструментами для измерения воздействующих на них сил и моментов при проведении нейрохирургических операций | 2019 |
|
RU2736162C2 |
| МНОГОФУНКЦИОНАЛЬНОЕ БЕСПРОВОДНОЕ УСТРОЙСТВО СО СМЕННЫМИ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ ДЛЯ ИЗМЕРЕНИЯ ИХ УГЛОВ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ И ВОЗДЕЙСТВУЮЩИХ НА НИХ СИЛ И МОМЕНТОВ ПРИ ПРОВЕДЕНИИ НЕЙРОХИРУРГИЧЕСКИХ ОПЕРАЦИЙ | 2022 |
|
RU2807937C1 |
| Двухслойный фантом позвонка с регулируемыми силовыми параметрами при деформировании за счёт изменения соотношения компонентов материала | 2022 |
|
RU2801492C1 |
| Комбинированная интраоперационная навигационная система с использованием генерации ультразвуковых изображений методом трассировки лучей | 2022 |
|
RU2816071C1 |
| Роботизированный мультифункциональный лазерный хирургический комплекс | 2018 |
|
RU2693216C1 |
| Робот-ассистированный комплекс минимально инвазивной абдоминальной хирургии для автоматизированного выполнения операций методами локальной деструкции новообразований печени | 2023 |
|
RU2841089C1 |
| Навигационный комплекс для интраоперационного ориентирования при установке винтовых систем транспедикулярной фиксации в целевые позвонки | 2021 |
|
RU2770666C1 |
| Способ подготовки и выполнения хирургической операции с использованием дополненной реальности и комплекс оборудования для её осуществления | 2019 |
|
RU2707369C1 |
| Набор инструментов для проведения транспедикулярной фиксации позвоночника с моделированием стержней и фиксацией транспедикулярных и стопорных винтов | 2023 |
|
RU2808116C1 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ СПОНДИЛОЛИСТЕЗА НА ПОЯСНИЧНО-КРЕСТЦОВОМ УРОВНЕ | 2024 |
|
RU2832968C2 |
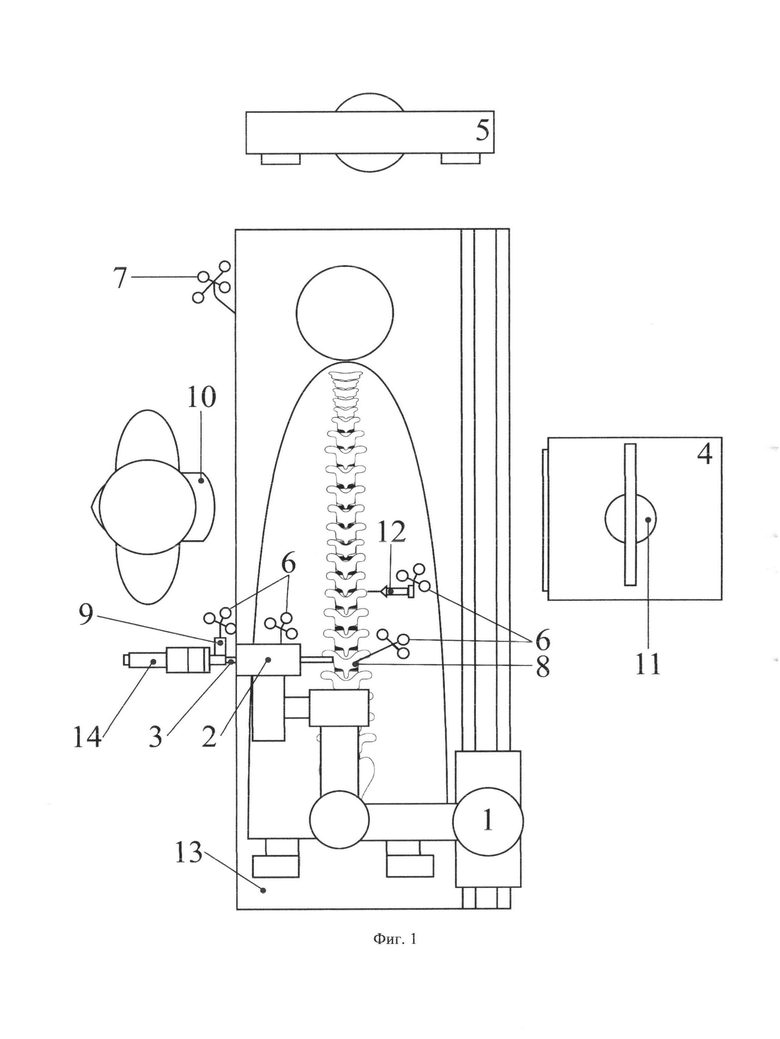
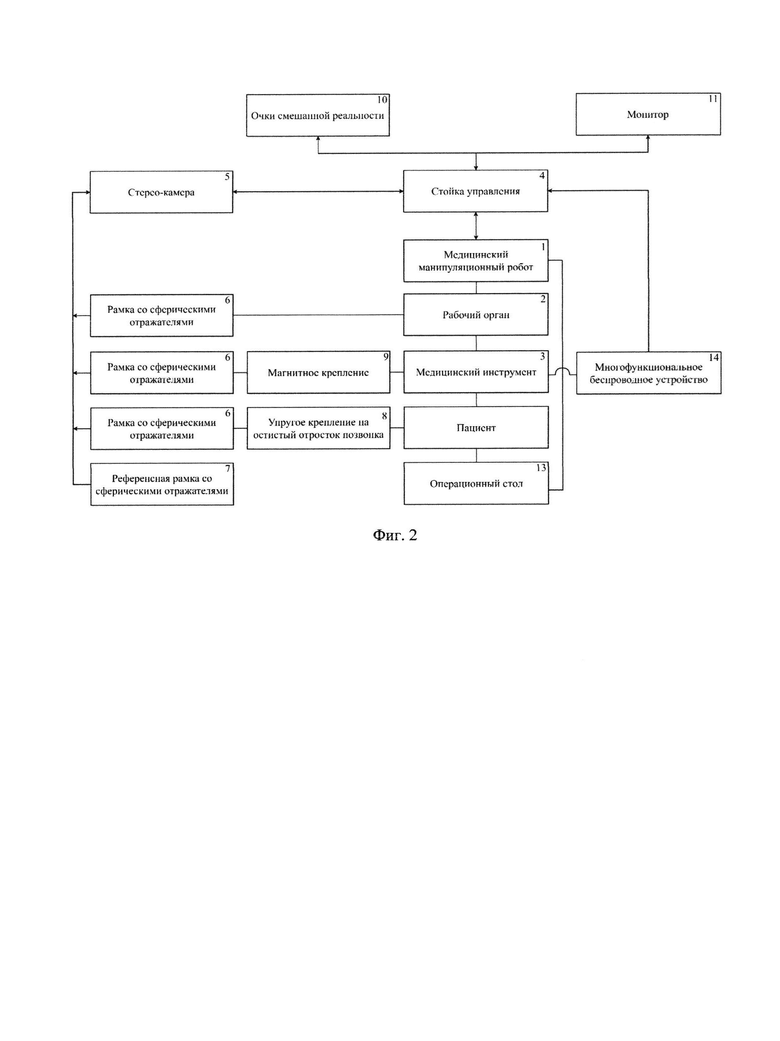
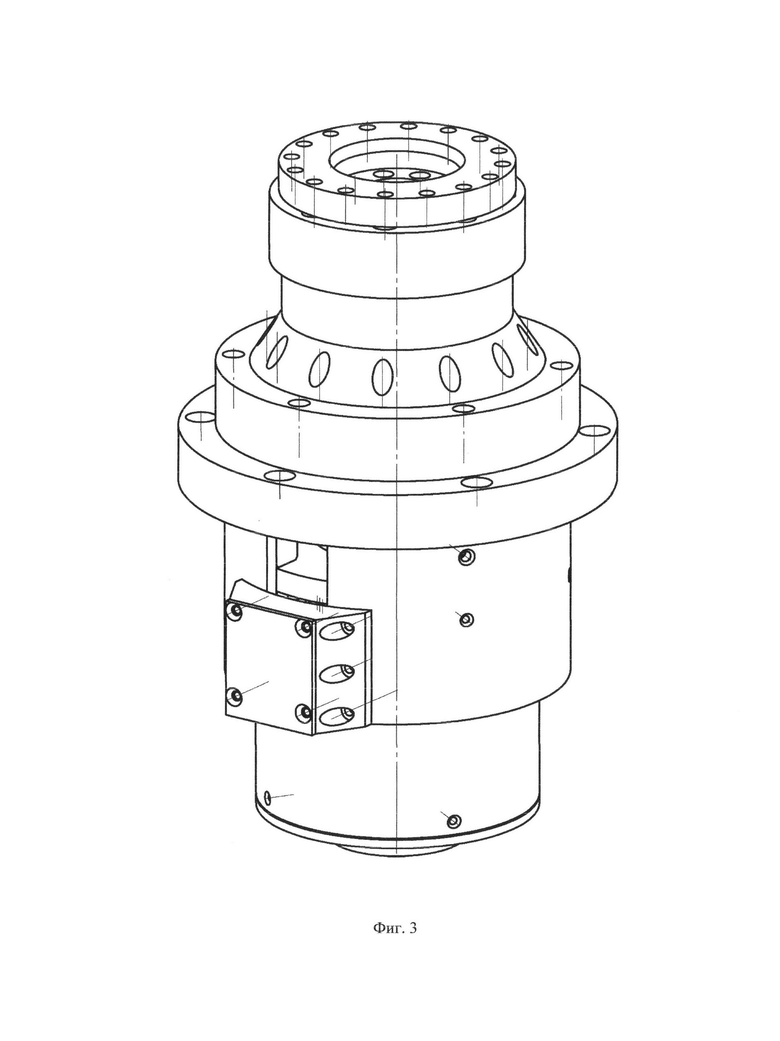
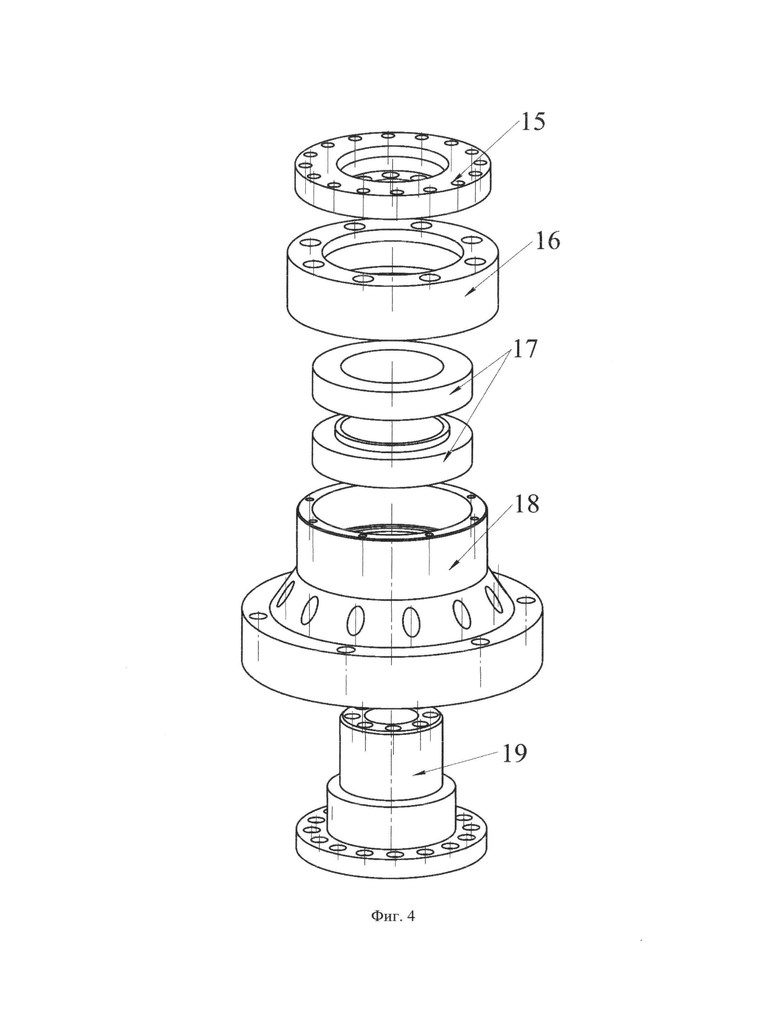
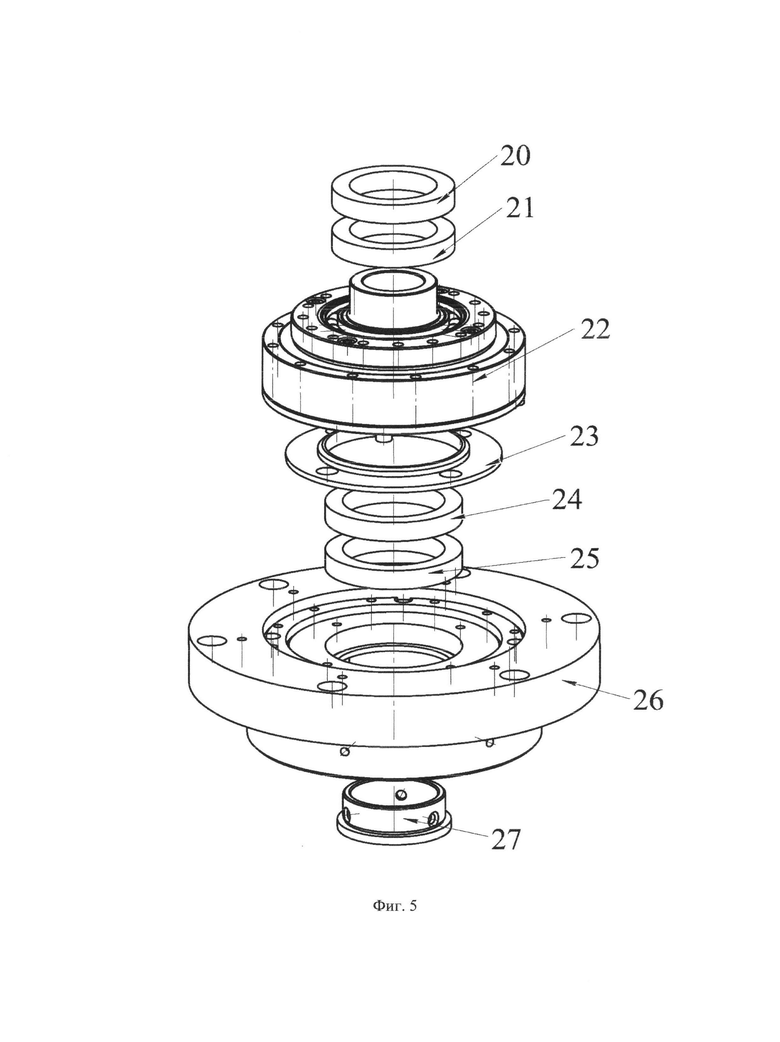
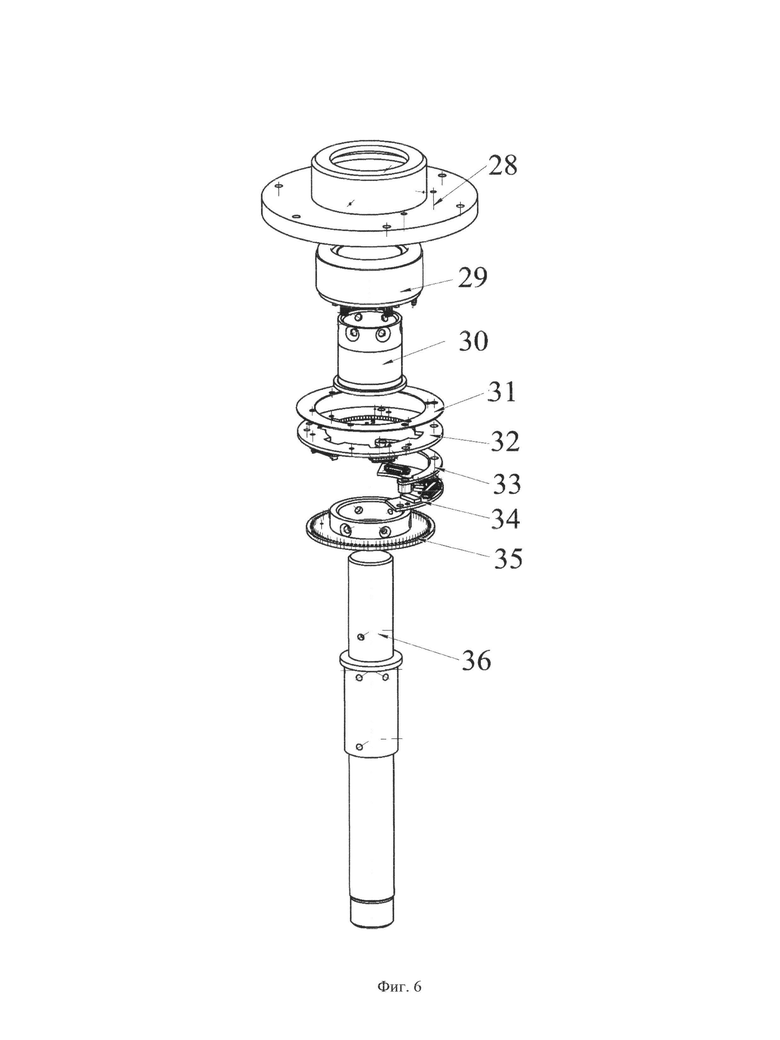
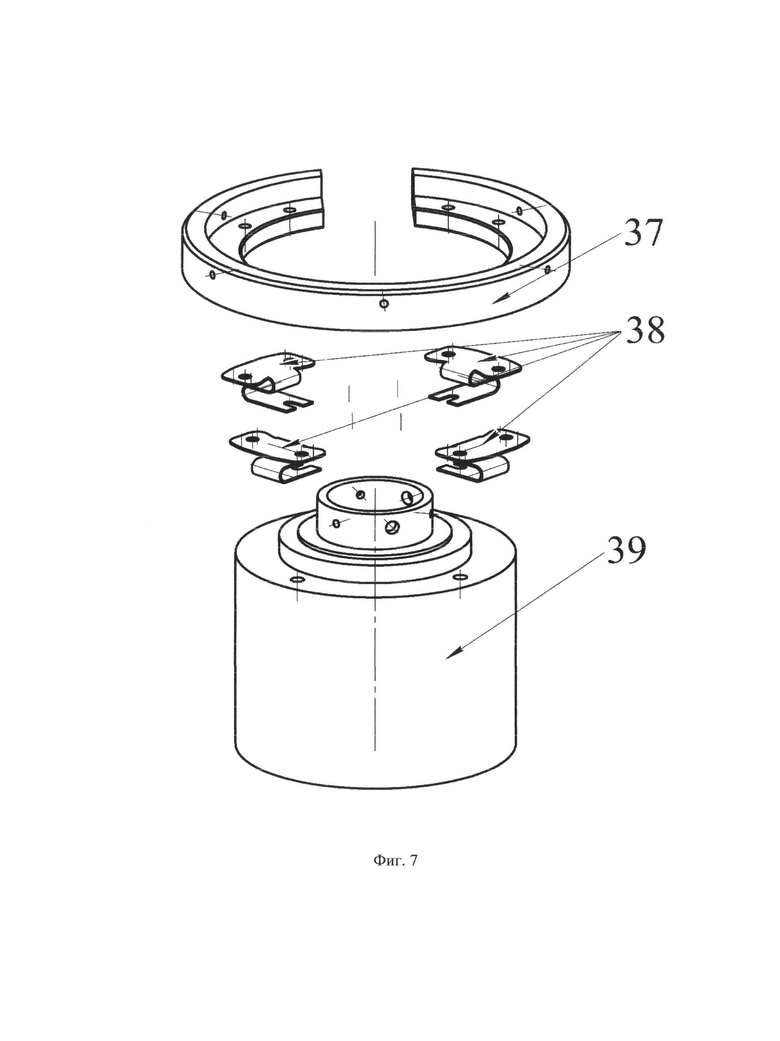
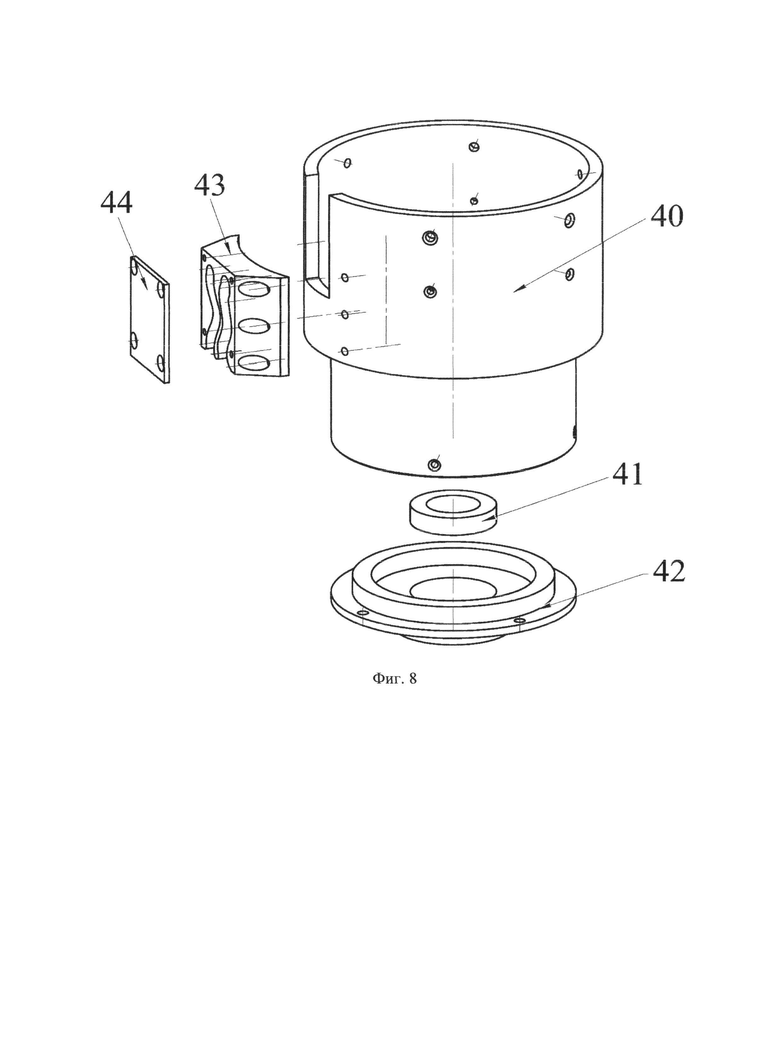
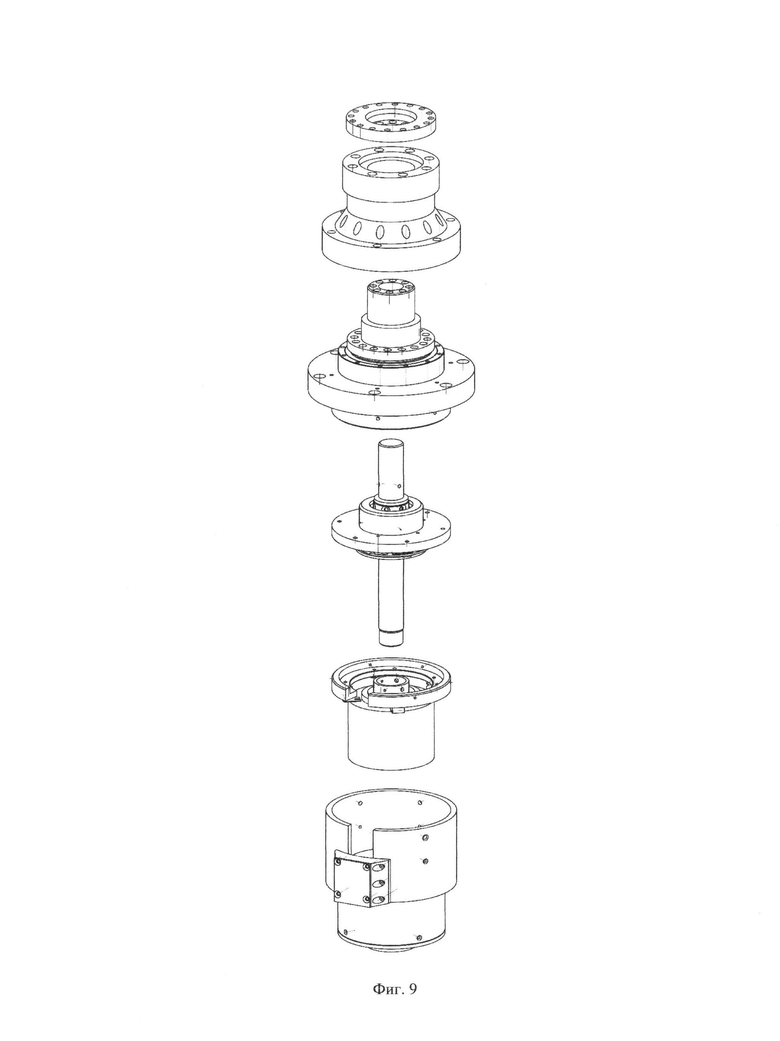
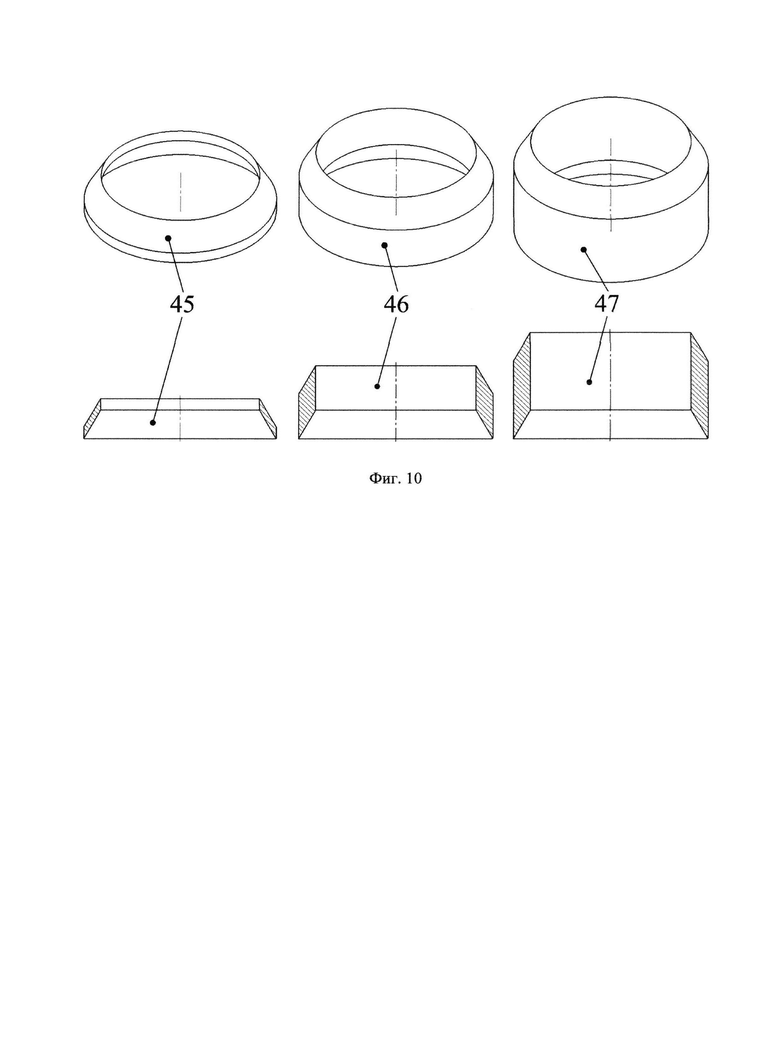
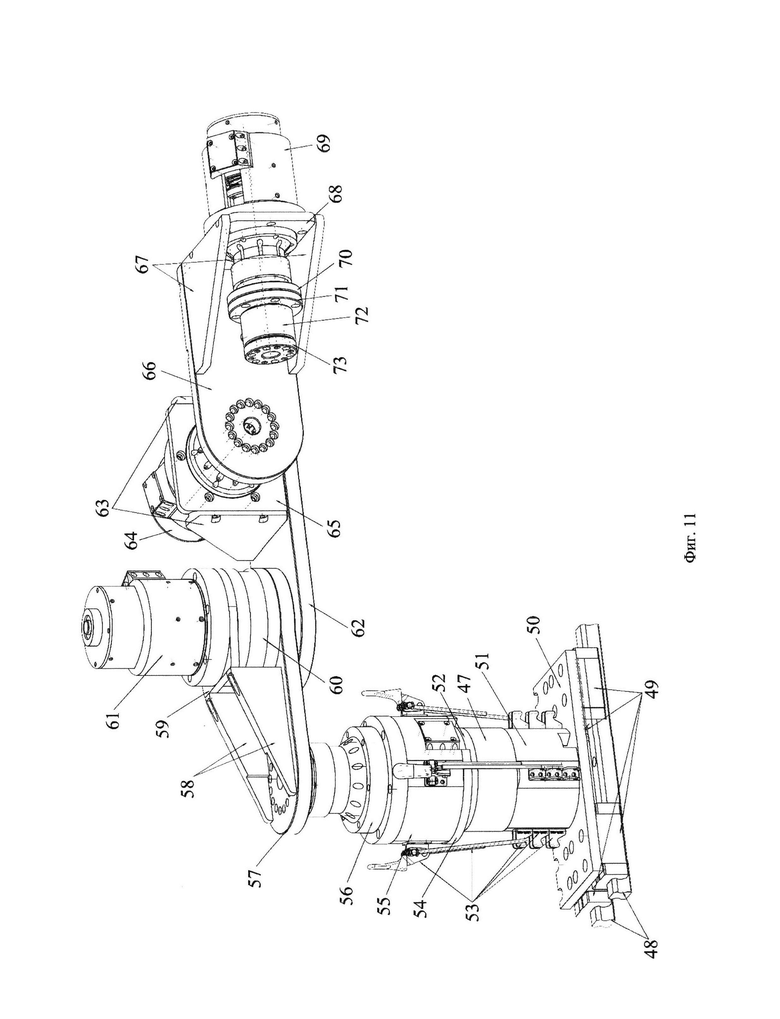
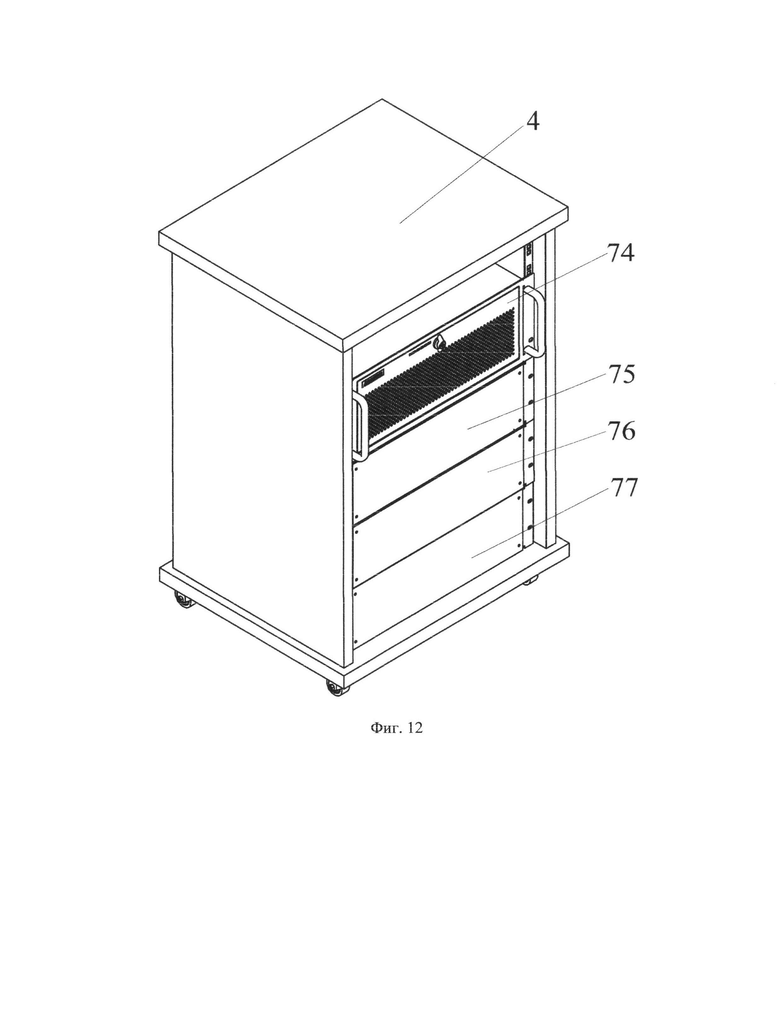
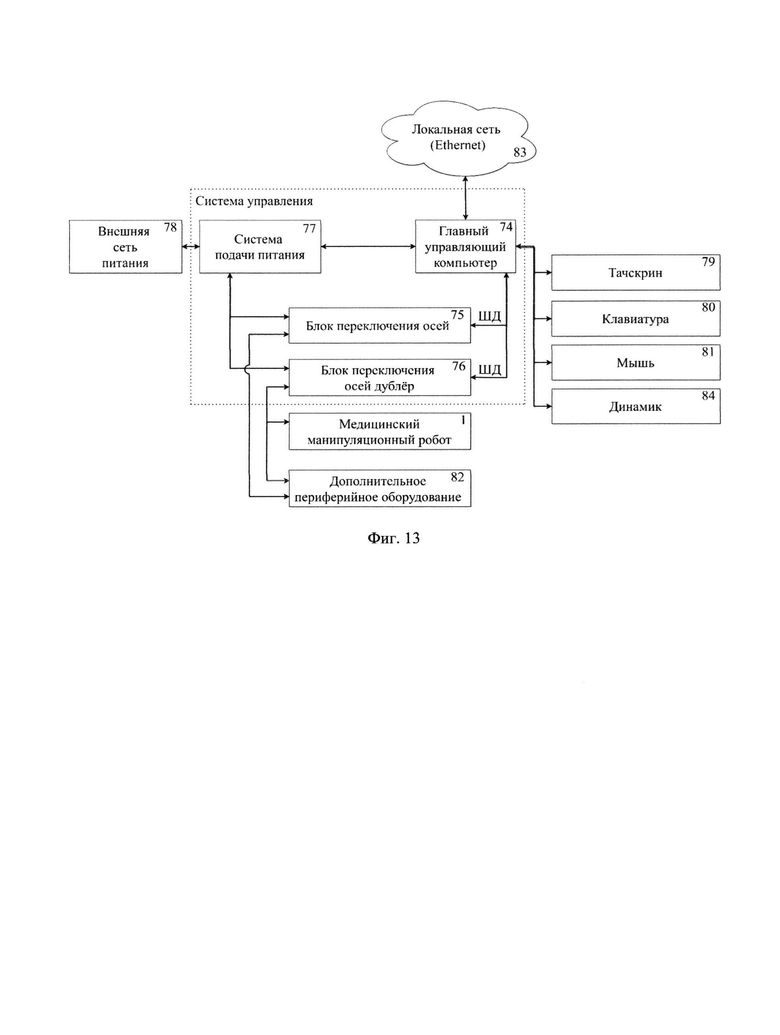
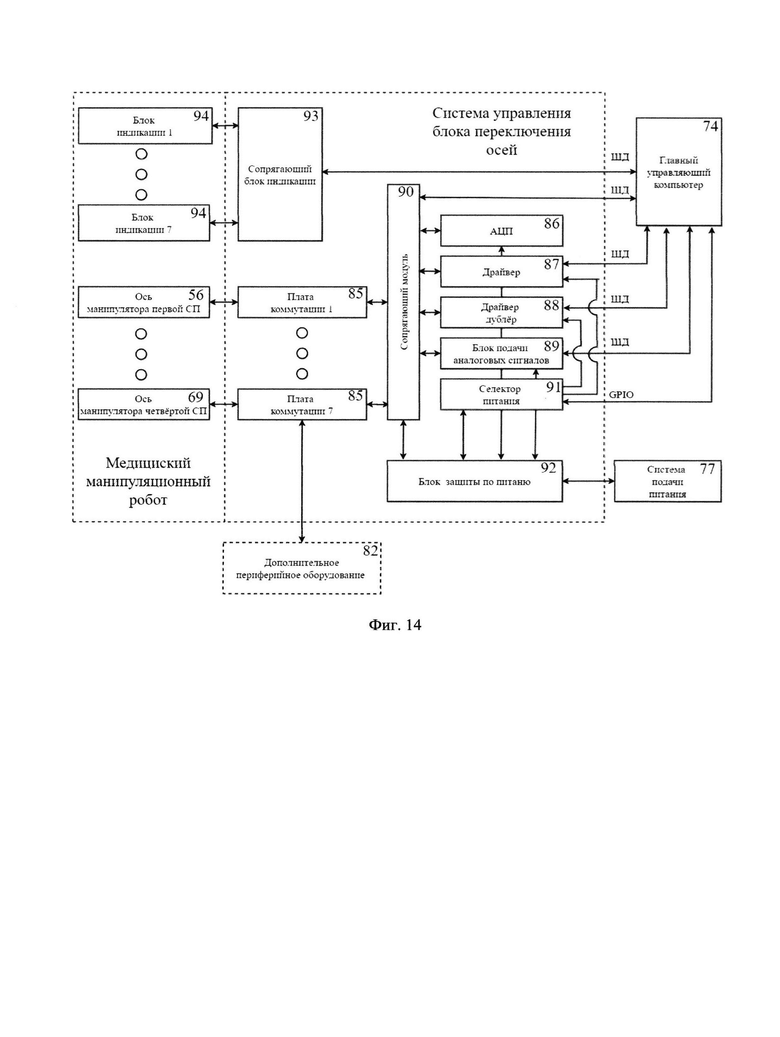
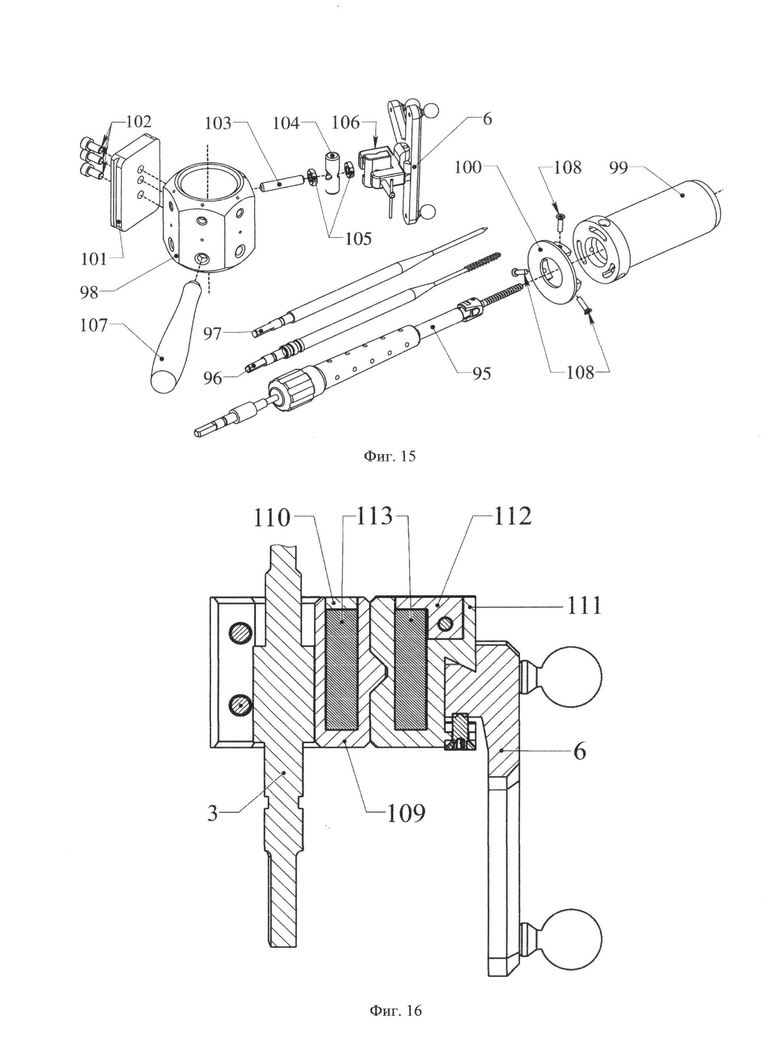
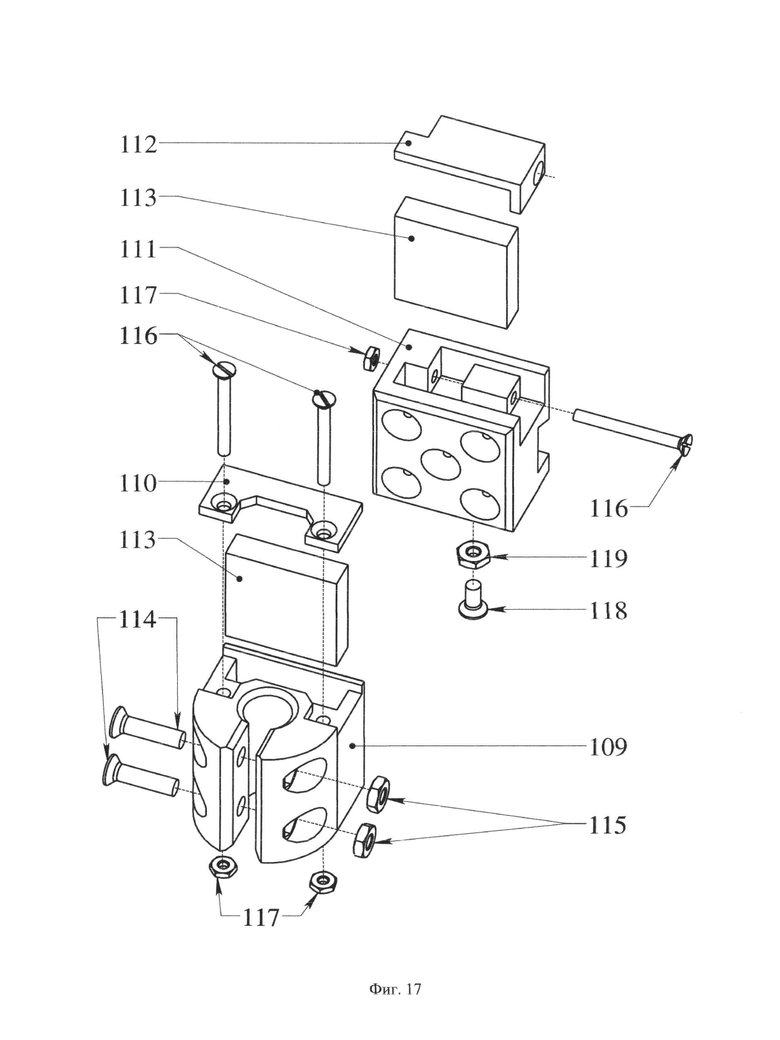
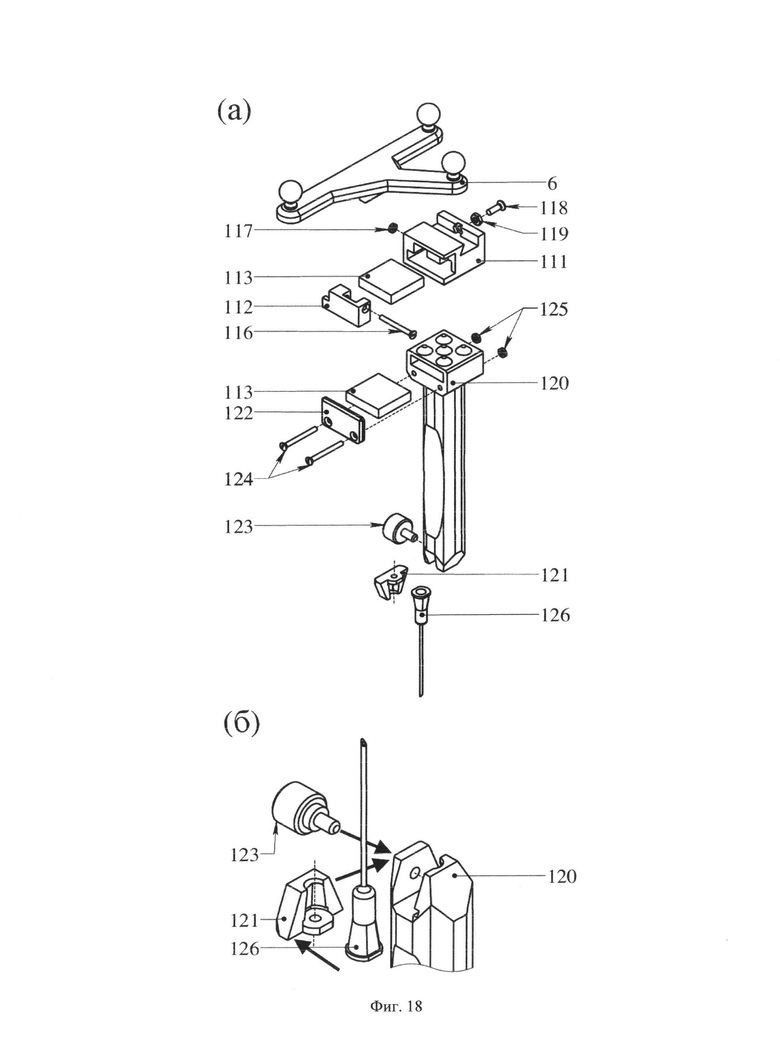
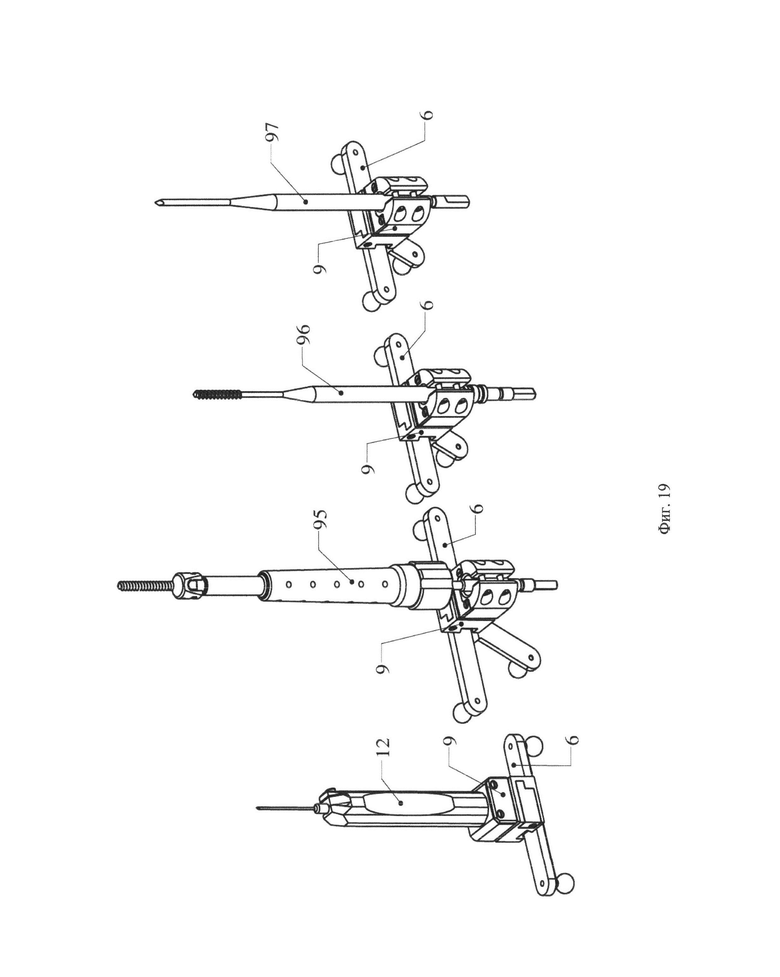
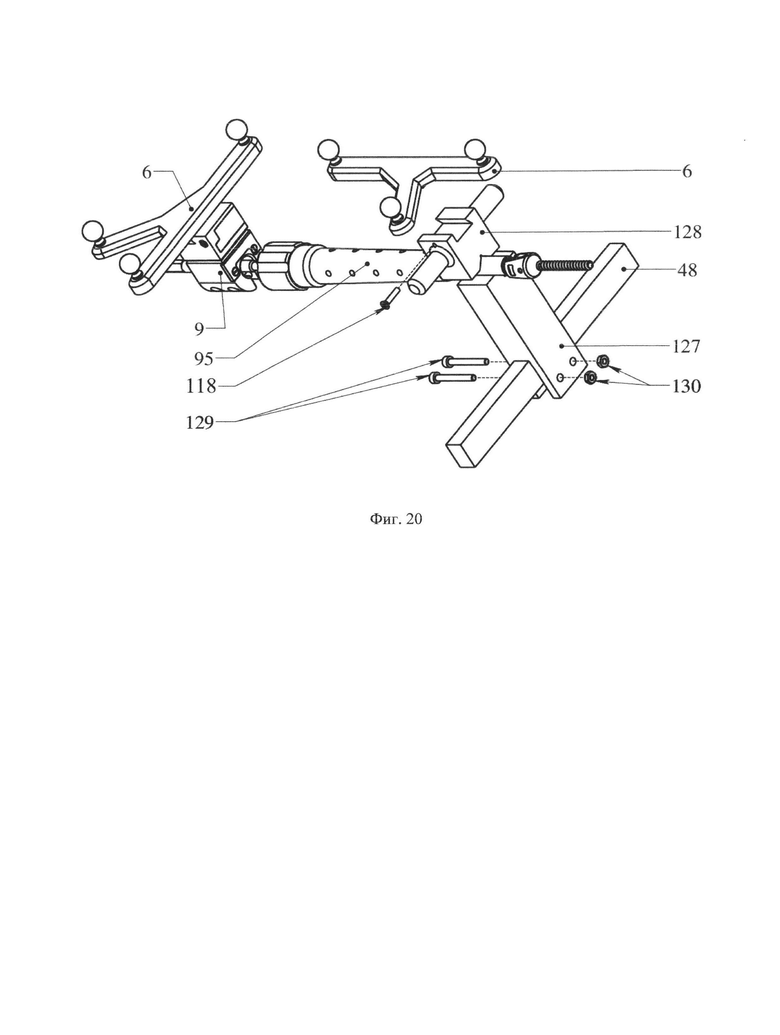
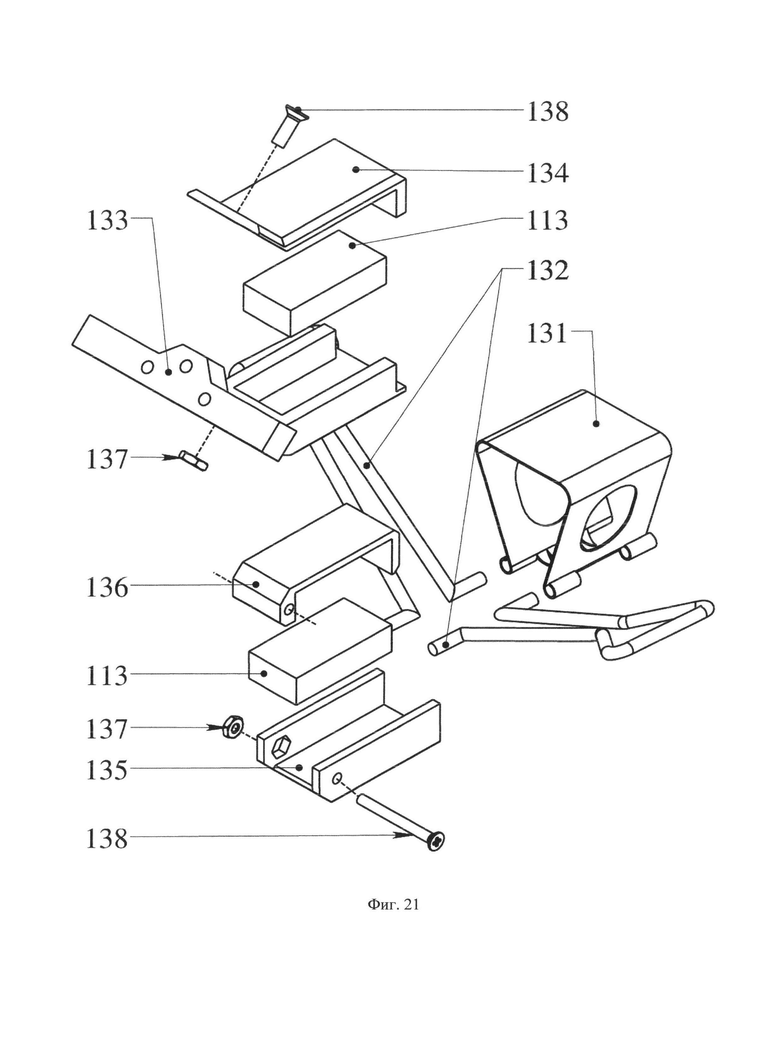
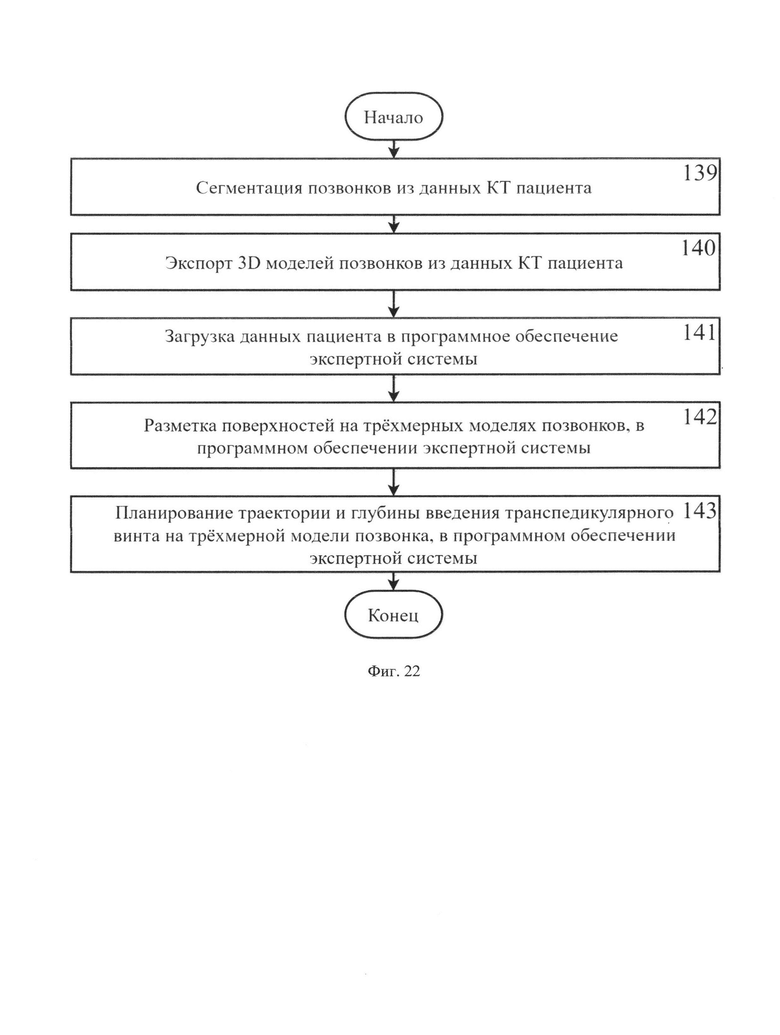
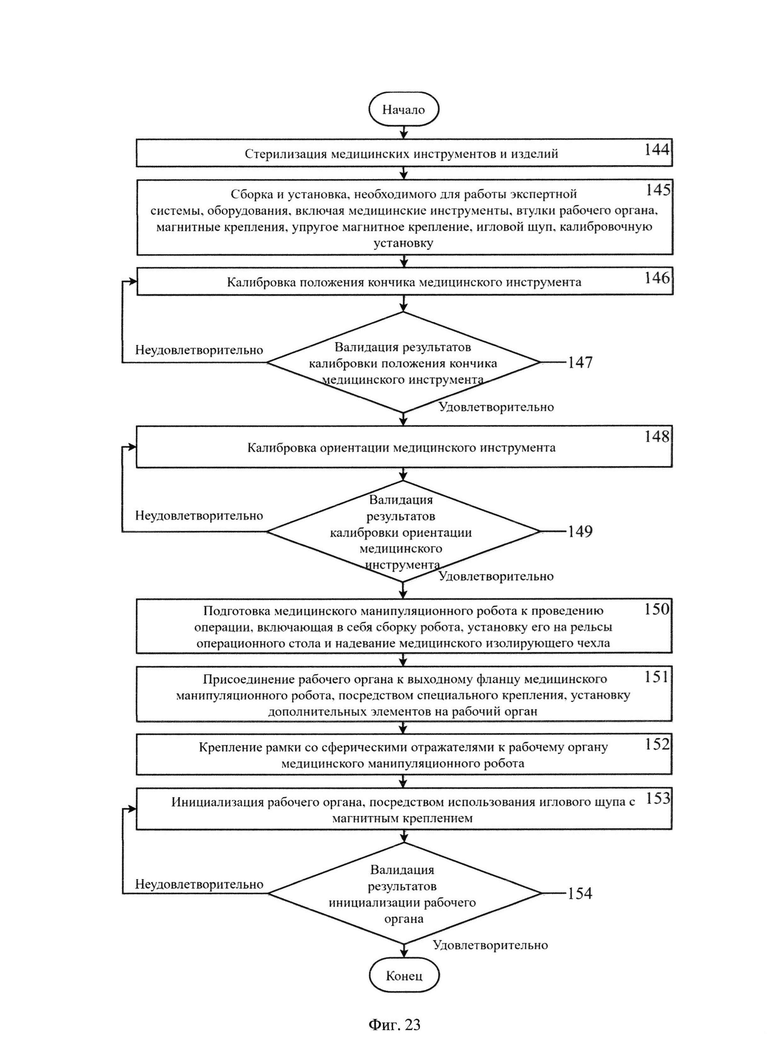
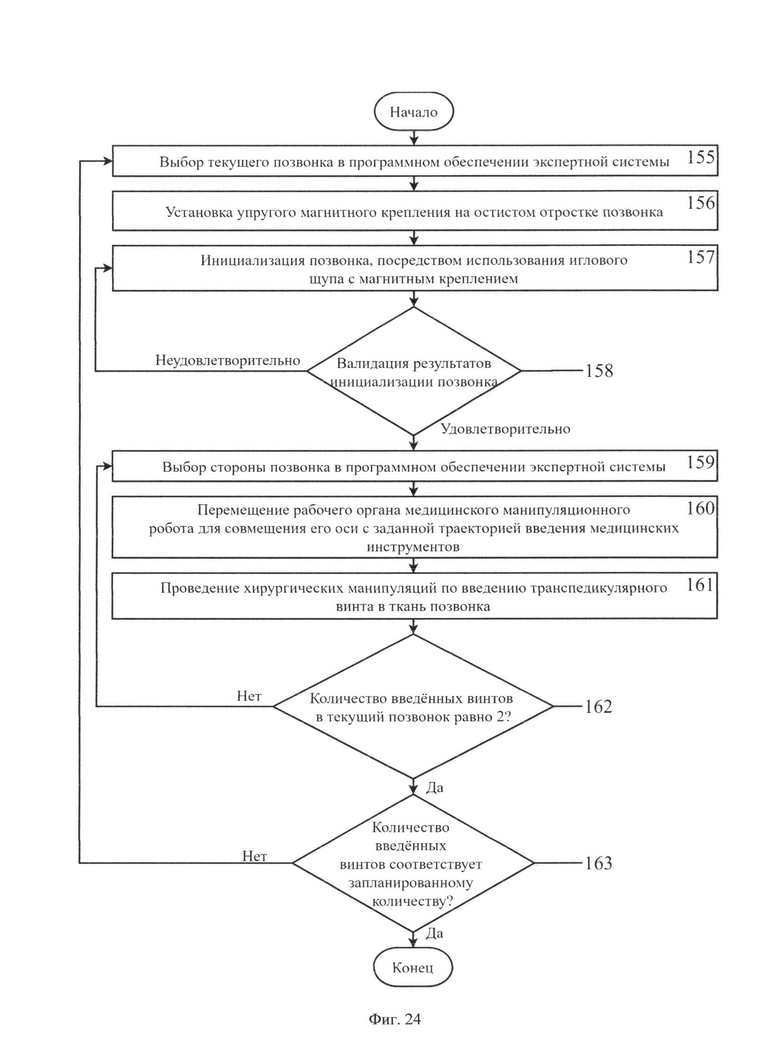
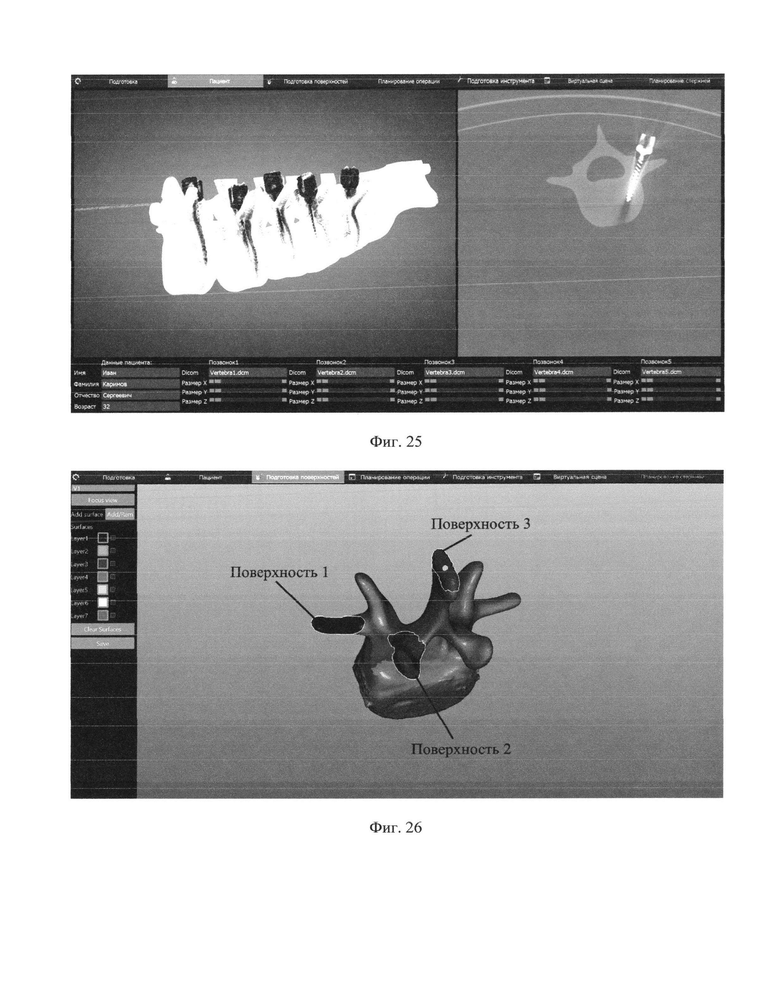
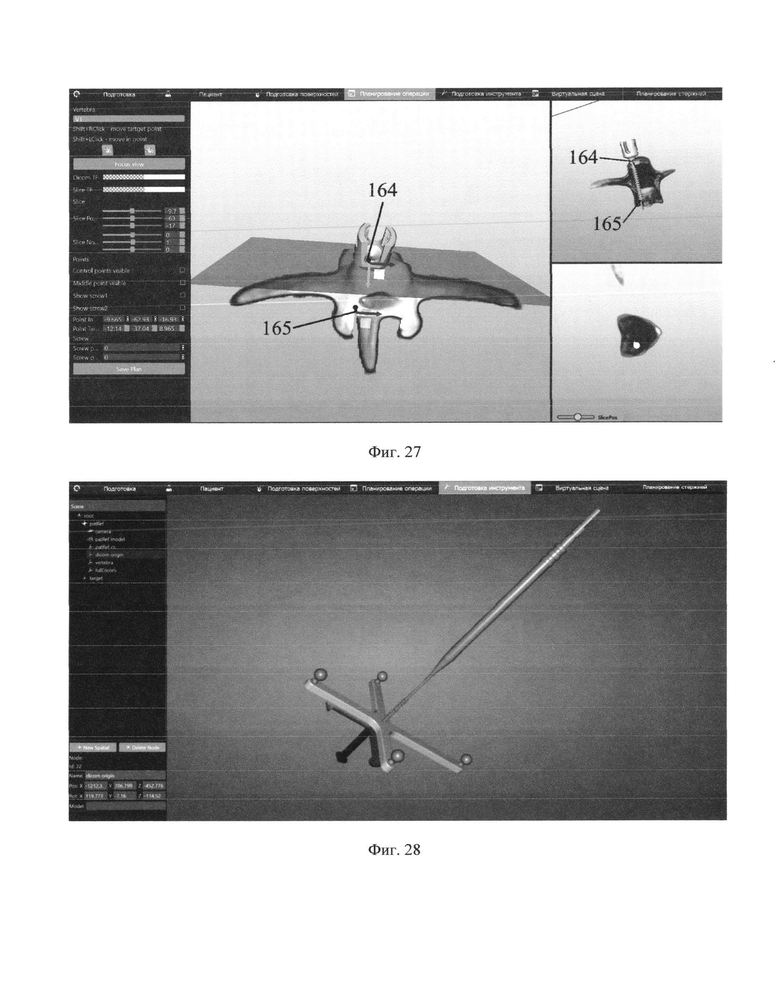
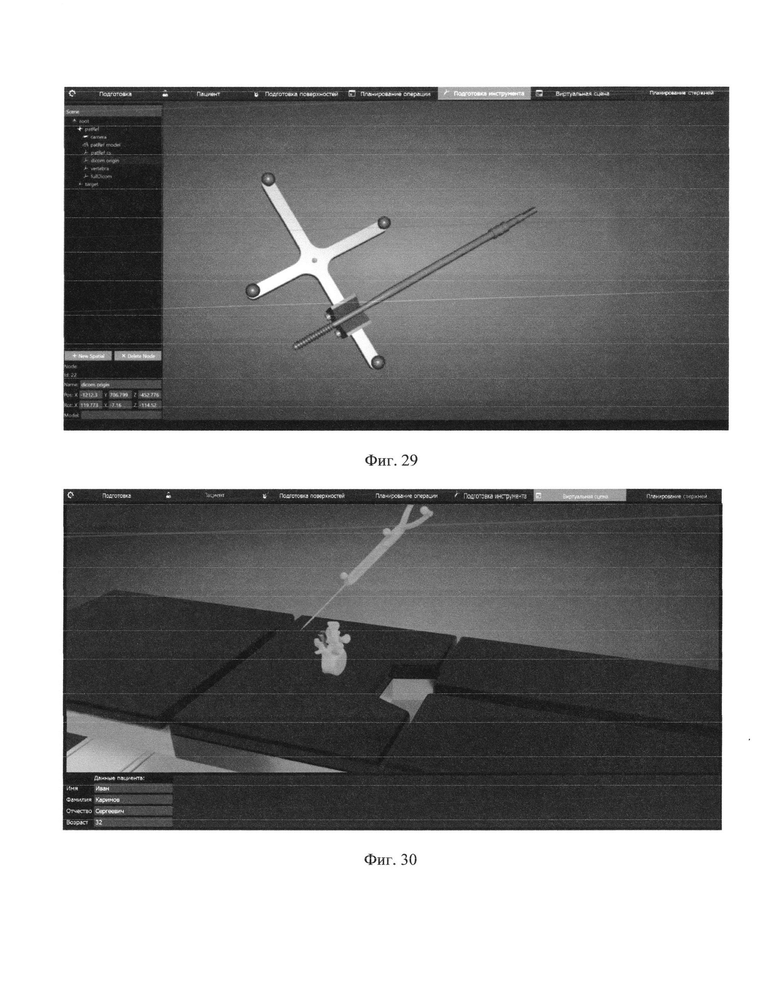
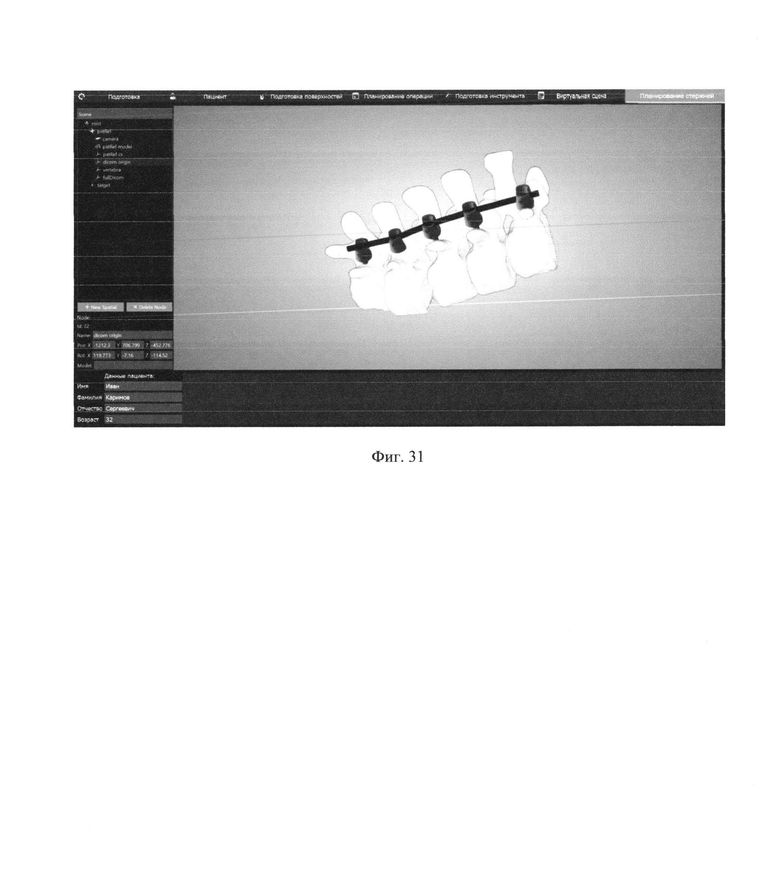
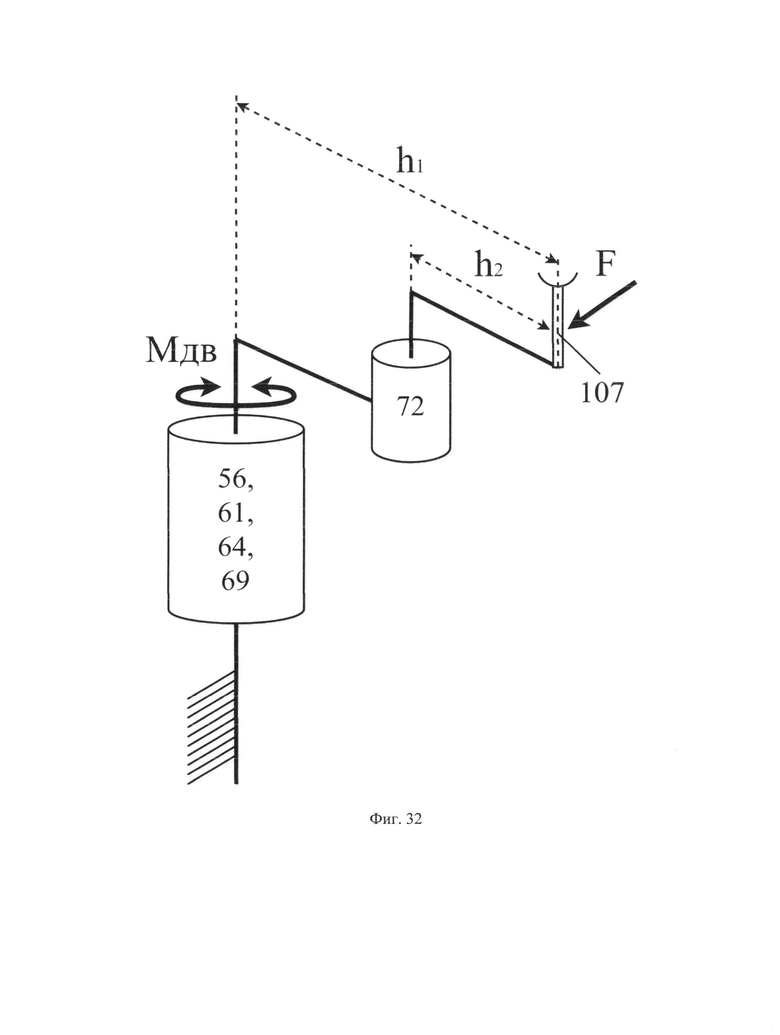
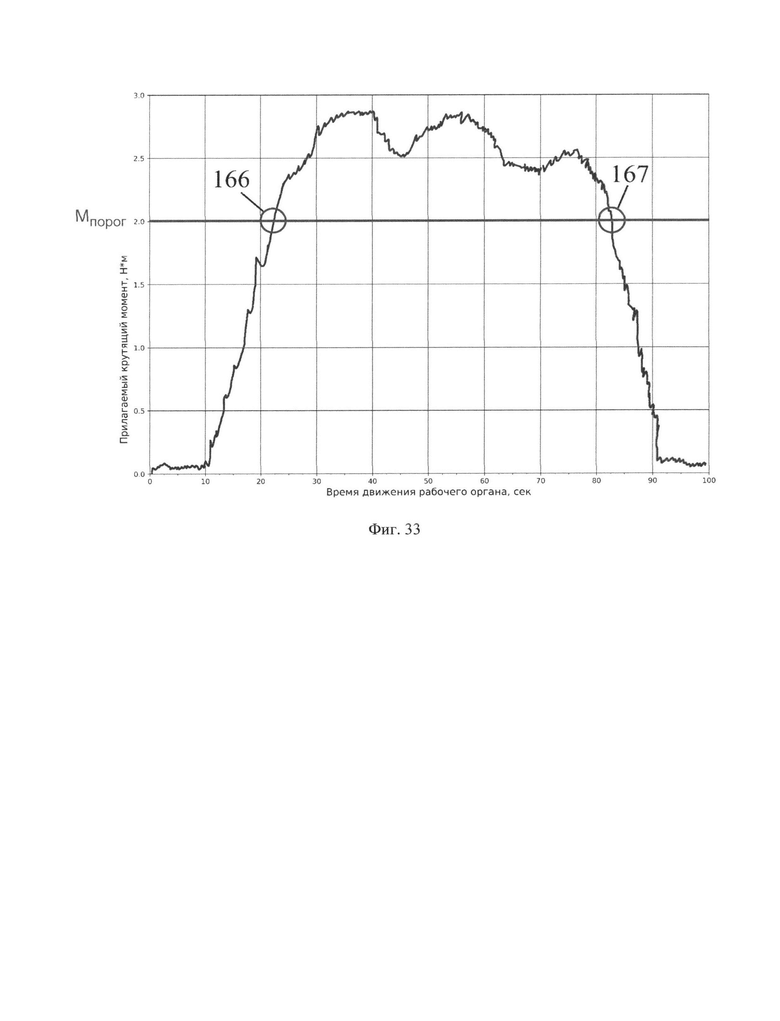
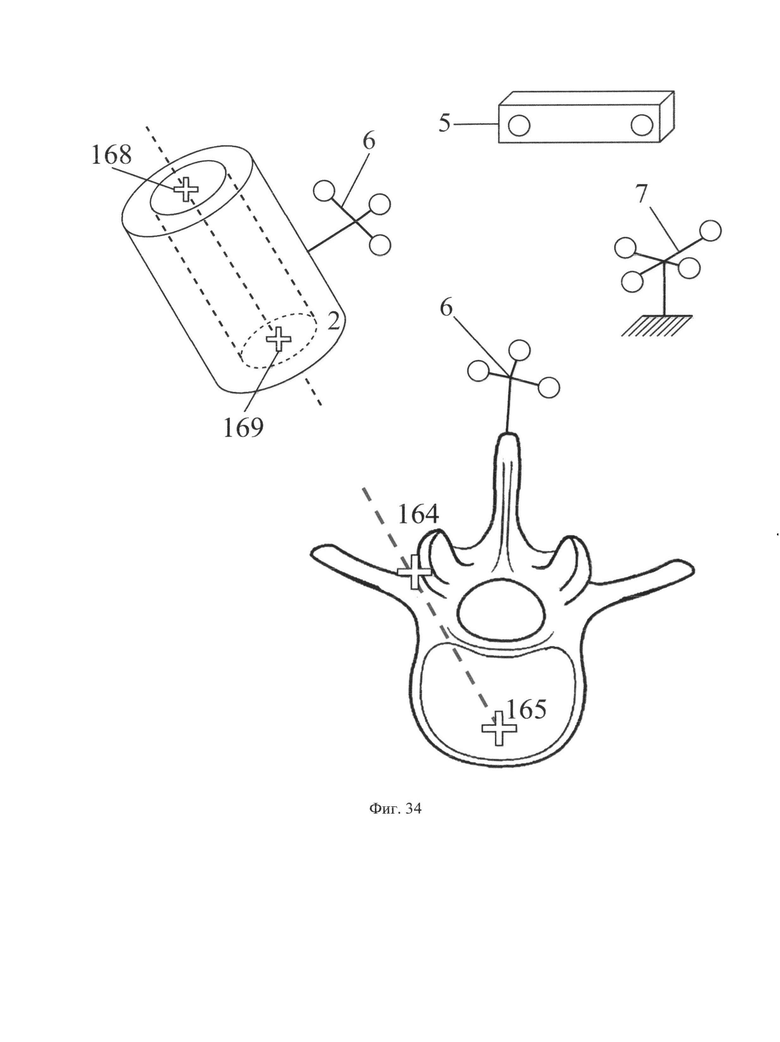
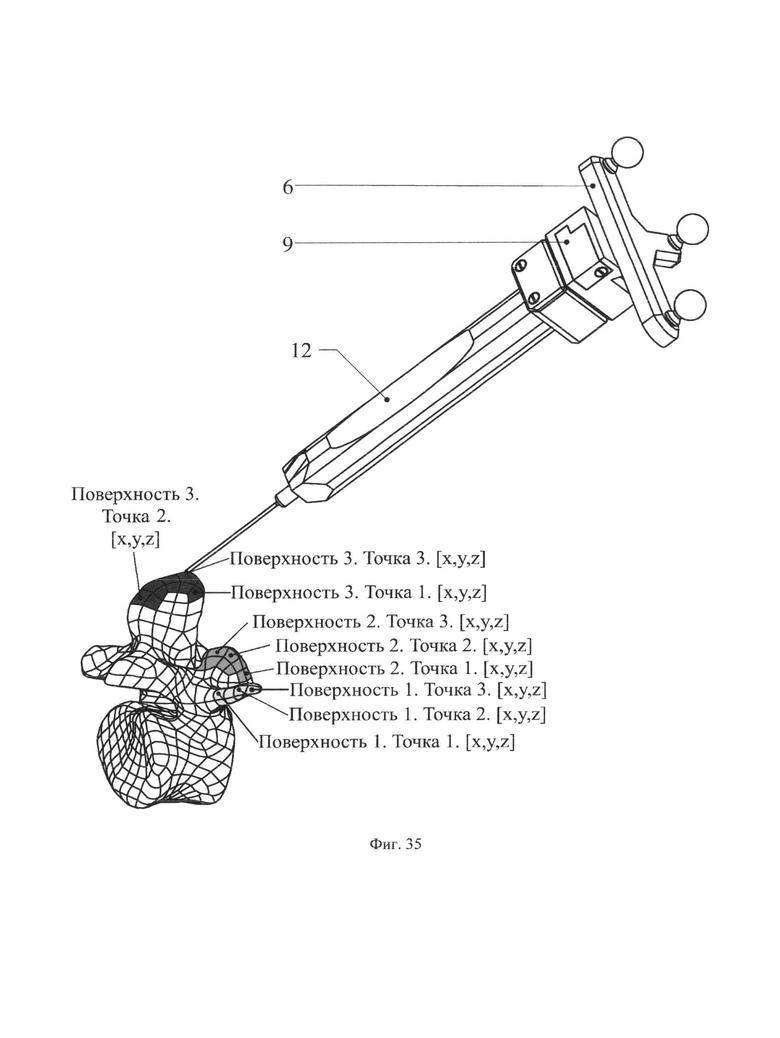
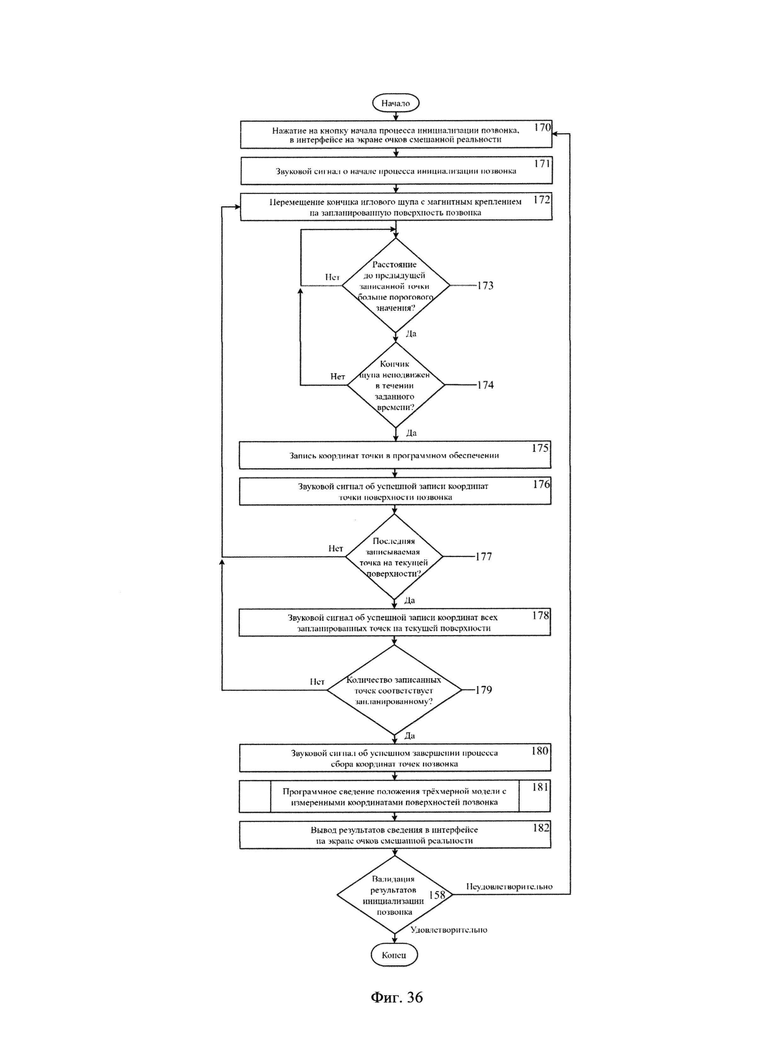
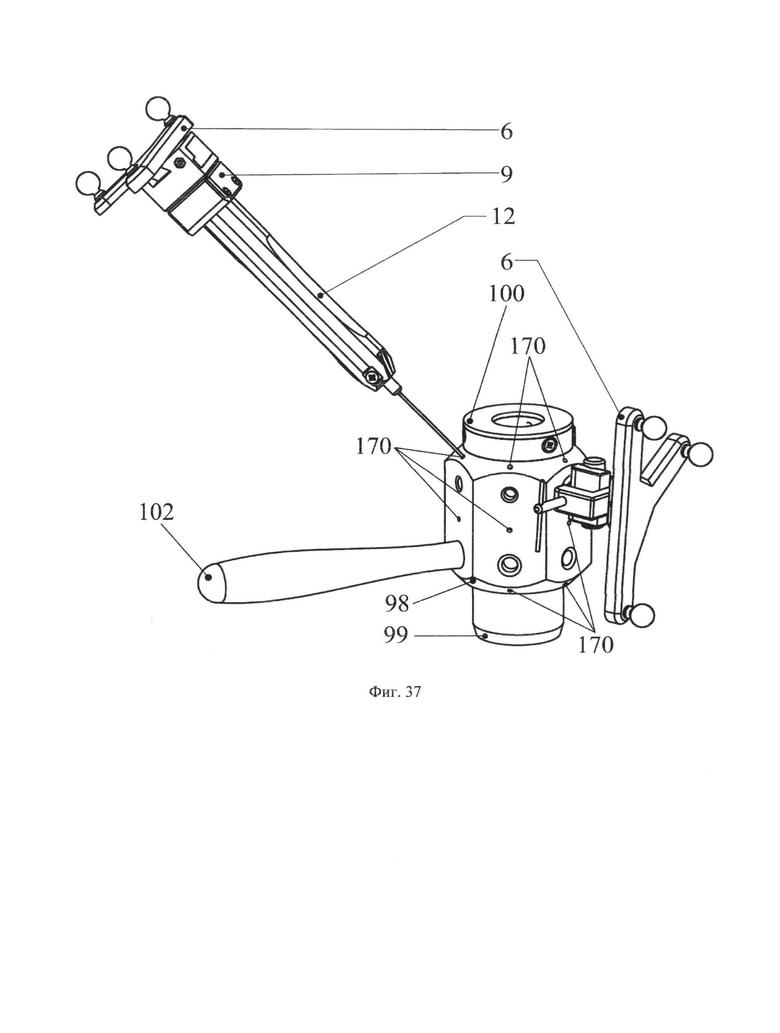
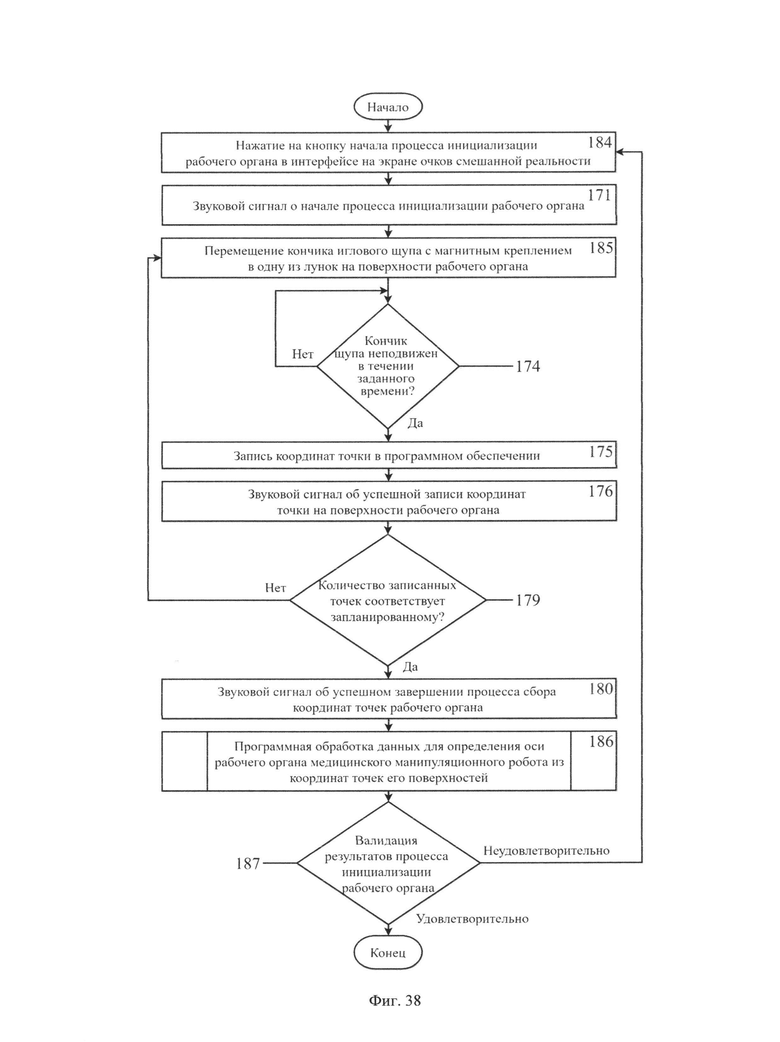
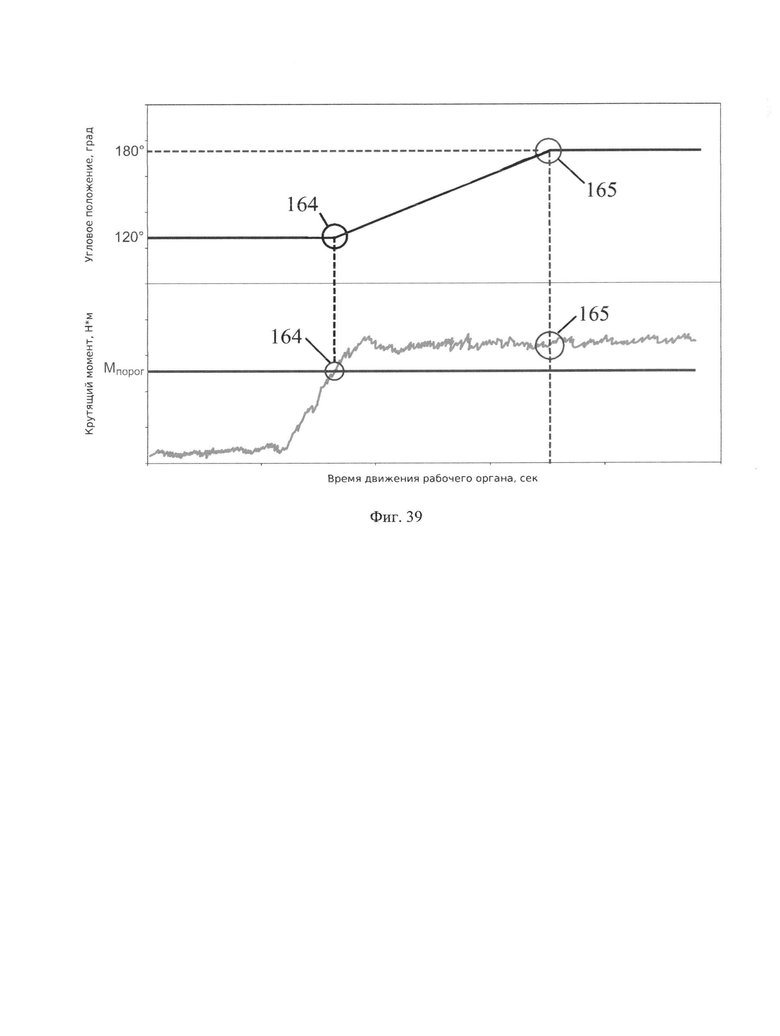
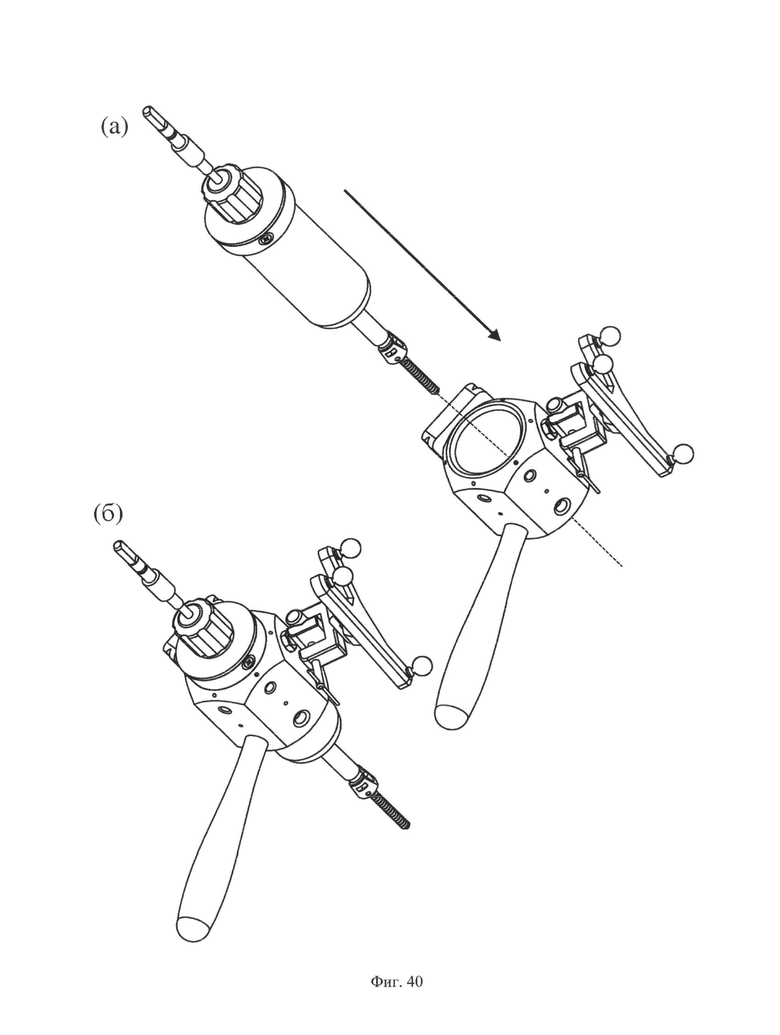
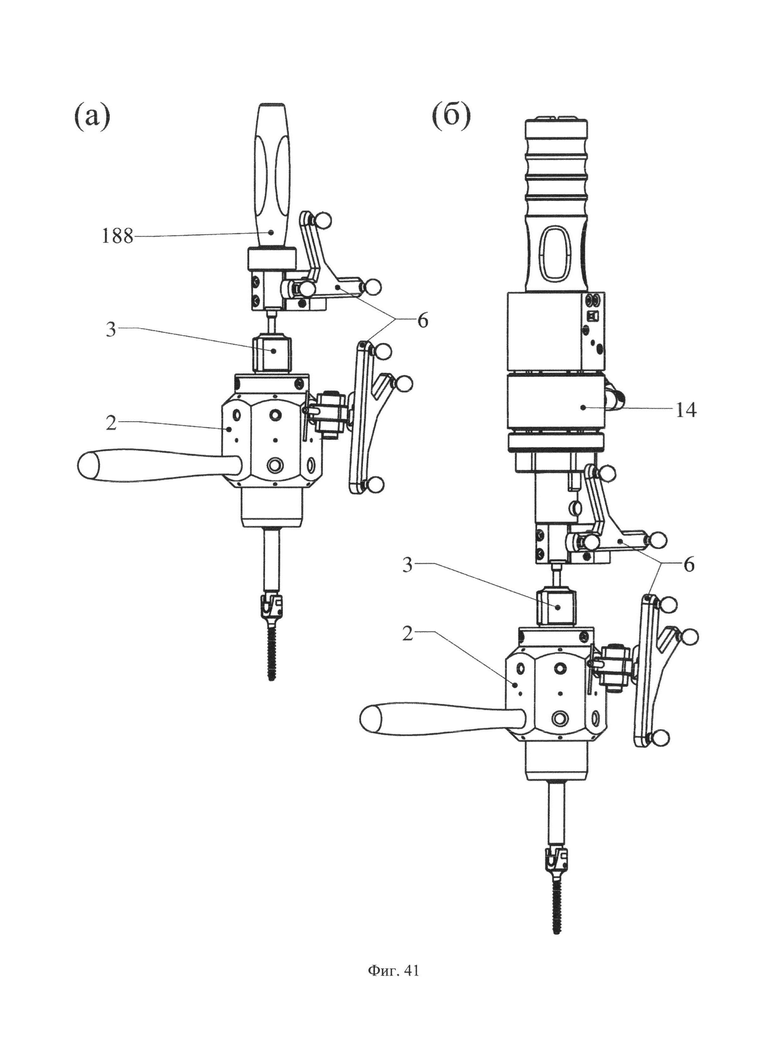
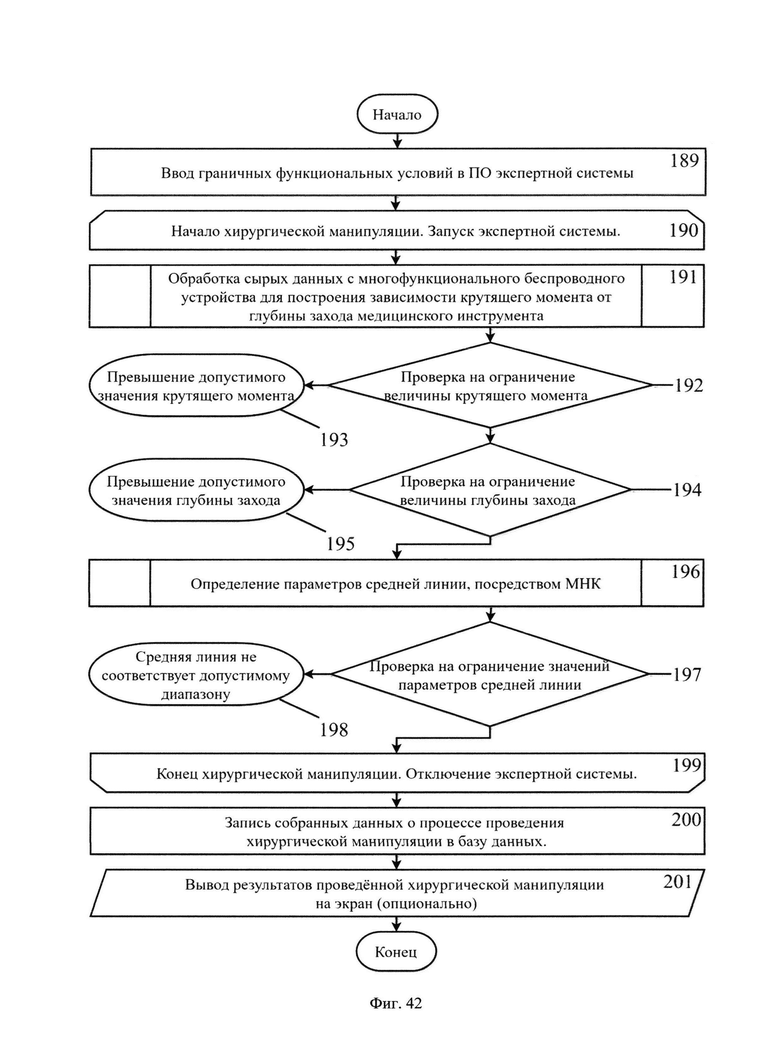
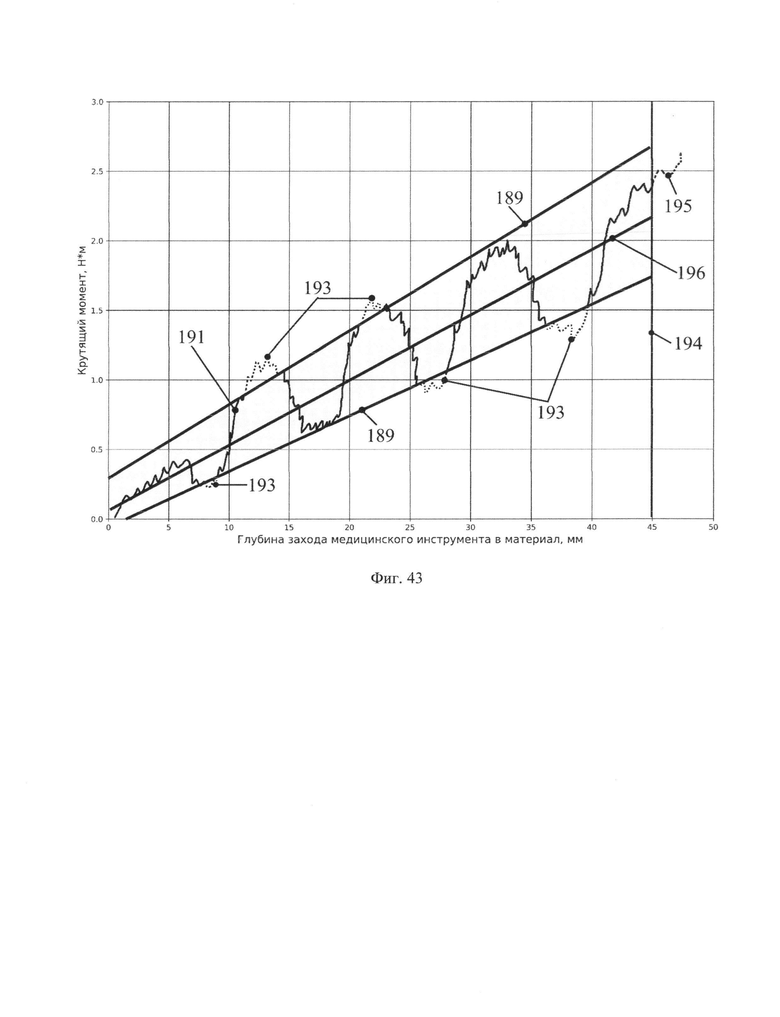
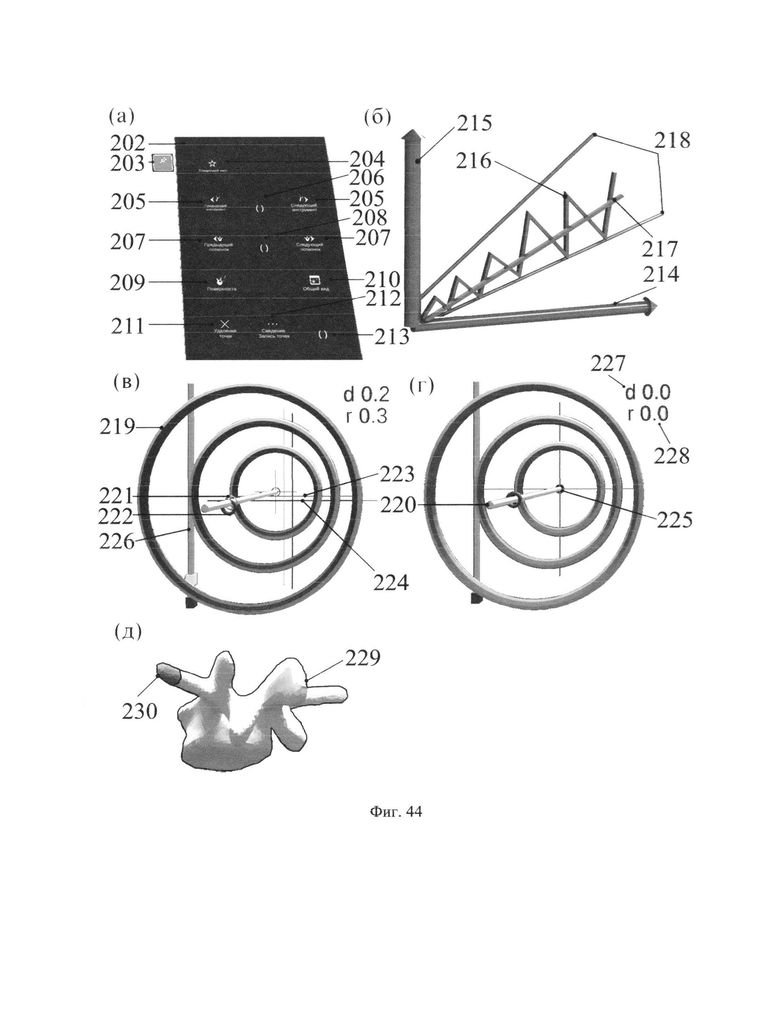


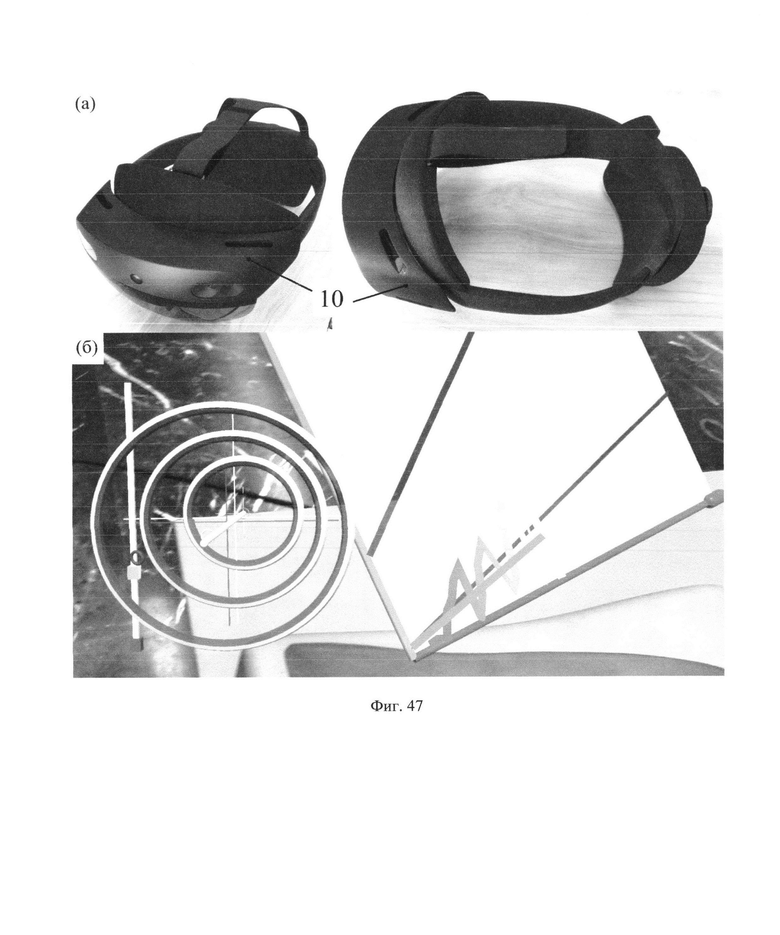
Группа изобретений относится к медицинской технике и может быть использована для экспертного контроля за ходом выполнения хирургических манипуляций по положению, ориентации и силомоментным данным. Система состоит из медицинского манипуляционного робота и рабочего органа с двухсоставной втулкой, навигационной стереофотограмметрической системы, набора медицинских инструментов с магнитными креплениями, многофункционального беспроводного устройства и очков смешанной реальности. Взаимосвязь элементов экспертной системы обеспечивают способы их применения и программное обеспечение. Способ навигации медицинских инструментов включает последовательное перемещение осей робота по сигналам силомоментного датчика, планирование траектории введения транспедикулярного винта на трехмерной модели позвонка, инициализацию позвонка посредством использования иглового щупа для сопоставления положения трехмерной модели и реального позвонка в стереофотограмметрической системе и инициализацию рабочего органа в стереофотограмметрической системе для определения положения и ориентации его оси и безопасного останова. Многофункциональное беспроводное устройство применяют в рамках экспертной функции для ограничения хода медицинских инструментов по силомоментным данным с выводом результатов на экран очков смешанной реальности. 5 н.п. ф-лы, 47 ил.
1. Экспертная система, применяемая для проведения операций по транспедикулярной фиксации позвоночника, включающая медицинский манипуляционный робот, состоящий из основания с варьируемой высотой подъема, четырех последовательно установленных друг за другом вращательных осей, системы управления, имеющей в своем составе блок переключения осей с наличием в нем драйвера дублера, рабочего органа, обеспечивающего перемещение медицинского инструмента за счет двухсоставной втулки, имеющего пять резьбовых отверстий на каждой поверхности рабочего органа, с шагом 60 градусов и общим углом обхвата в 300 градусов, и имеющего 17 конусообразных лунок на поверхности рабочего органа,
причем ось медицинского манипуляционного робота состоит из синхронного электродвигателя с постоянными магнитами и полым валом, волнового редуктора с полым валом, датчика положения с постоянными магнитами и полым валом и нормально замкнутого тормоза с полым валом и переменным моментом торможения на базе порошков, магнитореологических жидкостей или фрикционных элементов, объединяемых с помощью единого вала и упругих зажимов, которые установлены между нормально замкнутым тормозом и двигателем; навигационную стереофотограмметрическую систему, набор медицинских инструментов с магнитными креплениями, включающими
удерживающие рамки со сферическими отражателями стереофотограмметрической системы относительно медицинского инструмента, в которых установлены постоянные магниты, состоящие из двух частей, в одной из которых расположены конические базирующие отверстия, а во второй расположены ответные базирующие конусы; упругое магнитное крепление;
очки смешанной реальности для визуального получения хирургом навигационной информации о ходе проведения операции, транслируемой на экран очков в виде значений экспертной функции, представляемой мишенью для навигации по положению и силомоментными данными, возникающими во время закручивания транспедикулярных винтов и хирургических метчиков в графической форме, и программное обеспечение по транспедикулярной фиксации,
и обладающая безопасностью за счет навигации медицинских инструментов одновременно по положению и по силомоментным данным, использующая экспертную функцию для ограничения хода медицинских инструментов по силомоментным данным и контроля над ходом выполнения хирургической манипуляции по закручиванию транспедикулярных винтов и хирургических метчиков, имеющая возможность ввода граничных функциональных условий, которые определяются хирургом в экспертной системе путем ввода значений перед началом проведения операции, позволяющих не превышать и не занижать момент вкручивания транспедикулярных винтов и хирургических метчиков в зависимости от глубины введения медицинских инструментов, а также имеющая взаимосвязь этих граничных функциональных условий с визуальной и звуковой индикацией состояния процесса проведения хирургической операции.
2. Медицинский манипуляционный робот, состоящий из основания с варьируемой высотой подъема за счет замены посадочных цилиндров переменной высоты, четырех последовательно установленных друг за другом вращательных осей, системы управления, имеющей в своем составе блок переключения осей, предназначенный для переключения питания и управляющих команд на выбранную ось медицинского манипуляционного робота для ее перемещения с наличием в нем драйвера дублера, позволяющего дублировать функцию основного драйвера при наступлении нештатной ситуации, и дополнительный блок переключения осей, выполненный с возможностью применения для включения внешних периферийных устройств и обеспечения перемещения дополнительных рабочих органов, с драйвером-дублером, при этом вместе блок переключения осей и дополнительный блок переключения осей выполнены с возможностью осуществления одновременного управления двумя осями медицинского манипуляционного робота или двумя осями периферийного оборудования, и рабочего органа, обеспечивающего перемещение медицинского инструмента за счет двухсоставной втулки из пары материалов с коэффициентом трения скольжения по отношению друг к другу, имеющего пять резьбовых отверстий на каждой поверхности рабочего органа, с шагом 60 градусов и общим углом обхвата в 300 градусов для крепления опорной ручки и рамки со сферическими отражателями стереофотограмметрической системы, имеющего 17 конусообразных лунок на поверхности рабочего органа для проведения инициализации положения и ориентации оси рабочего органа в стереофотограмметрической системе.
3. Ось медицинского манипуляционного робота, состоящая из синхронного электродвигателя с постоянными магнитами и полым валом, волнового редуктора с полым валом, датчика положения с постоянными магнитами и полым валом и нормально замкнутого тормоза с полым валом и переменным моментом торможения на базе порошков, магнитореологических жидкостей или фрикционных элементов, выполненного с возможностью при управлении движением оси медицинского манипуляционного робота осуществлять управляемый останов с безопасностью дублируя останов при помощи двигателя, объединяемых с помощью единого вала и упругих зажимов, которые установлены между нормально замкнутым тормозом и двигателем для обеспечения нивелирования внутренних биений конструкции.
4. Магнитные крепления для медицинских инструментов, удерживающие рамки со сферическими отражателями стереофотограмметрической системы относительно медицинского инструмента, в которых установлены постоянные магниты, состоящие из двух частей, в одной из которых расположены конические базирующие отверстия, а во второй расположены ответные базирующие конусы; упругое магнитное крепление для удержания рамки со сферическими отражателями стереофотограмметрической системы на позвонках пациентов, при этом фиксация упругого крепления на остистом отростке позвонка обеспечена упругостью материала крепления для ограничения силы зажатия и исключения возможности повреждения остистого отростка позвонка, функционирующая посредством раздвижения губок крепления пальцами.
5. Способ навигации экспертной системы по п. 1, включающей медицинский манипуляционный робот по п. 2, оси медицинского манипуляционного робота по п. 3, навигационную стереофотограмметрическую систему, набор медицинских инструментов с магнитными креплениями по п. 4 и очки смешанной реальности;
состоящий из последовательного перемещения осей медицинского манипуляционного робота по сигналам с шестикомпонентного силомоментного датчика, планирования траектории и глубины введения транспедикулярного винта в педикулу позвонка пациента, инициализации позвонка посредством использования иглового щупа с магнитными креплениями после его калибровки для сопоставления поверхностей трехмерной модели позвонка и положения реального позвонка в навигационной стереофотограмметрической системе, инициализации рабочего органа медицинского манипуляционного робота посредством использования иглового щупа с магнитными креплениями для определения положения и ориентации оси рабочего органа медицинского манипуляционного робота в навигационной стереофотограмметрической системе, безопасного останова рабочего органа медицинского манипуляционного робота при помощи подачи управляющих сигналов с блока переключения осей на выбранную ось медицинского манипуляционного робота и применения многофункционального беспроводного устройства в составе рабочего органа медицинского манипуляционного робота и медицинских инструментов в рамках экспертной функции для ограничения хода медицинских инструментов по силомоментным данным и контроля над ходом выполнения хирургической манипуляции по закручиванию транспедикулярных винтов и хирургических метчиков.
| US 10856946 B2, 8.12.2020 | |||
| US 20220151704 A1, 19.05.2022 | |||
| US 20200289230 A1, 17.09.2020 | |||
| US 11490967 B2, 8.11.2022 | |||
| CN 106456145 A, 22.02.2017 | |||
| US 11013559 B2, 25.05.2021. |

