Изобретение относится к области гидроакустики и может быть использовано для регистрации проходной характеристики морского объекта в мелководной акватории с повышенным уровнем гидроакустических помех.
Процедура регистрации проходной характеристики морского объекта в мелководной акватории заключается в фиксации текущих значений уровня сигнала шумоизлучения движущегося морского объекта и регистрации изменения этого уровня во времени.
Измерения производятся в условиях фоновых помех в мелководной акватории, что в реальных условиях затрудняет регистрацию проходной характеристики морского объекта, поскольку при высоком уровне помех характеристика прохода оказывается искаженной импульсными и шумовыми помехами. При этом, поскольку в мелководной акватории предполагается регистрация малоразмерных и малоинерционных объектов, необходим постоянный непрерывный контроль местоположения морского объекта с использованием импульсных систем позиционирования и элементов движения морского объекта. Эти системы создают дополнительную импульсную помеху, с которой необходимо бороться.
Существующие методы измерения проходной характеристики предполагают измерения при расположении измерительной системы в дальней зоне (Фраунгофера) акустического поля морского объекта, характерной для глубокого моря.
Эти измерения не дают адекватную картину шумоизлучения малошумных объектов в мелководных акваториях, где возможно ими выполнение поставленных задач. Поскольку в условиях мелководных акваторий наблюдается явление отражения сигнала шумоизлучения от границ акустического волновода (поверхности и дна моря) и возникновение мнимых источников шумоизлучения морского объекта. Это приводит к формированию развитой интерференционной структуры акустического поля в пределах зоны Френеля, которая может иметь существенные размеры. Известно, что уровень интерференционных максимумов в зоне Френеля с расстоянием практически не изменяется, т.е. является одинаковым.
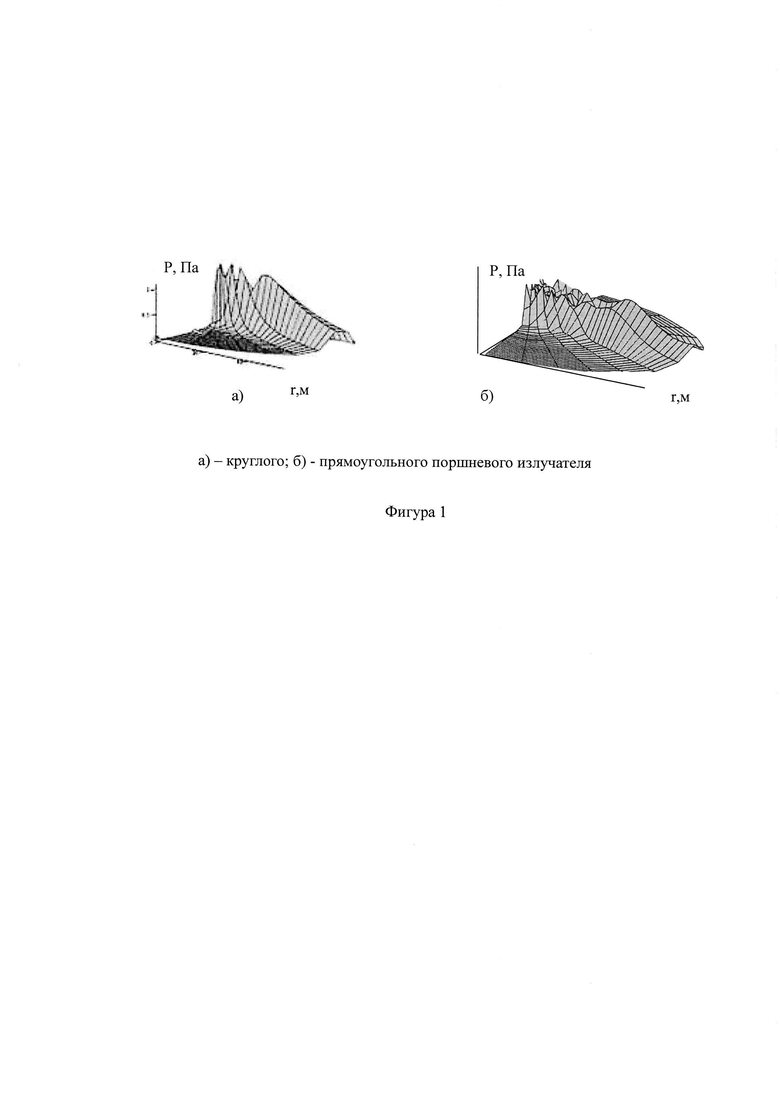
На фигуре 1 представлены результаты численного моделирования ближних зон Френеля гидроакустических излучателей различной формы: плоского круглого поршневого (1а) и плоского прямоугольного поршневого (1б).
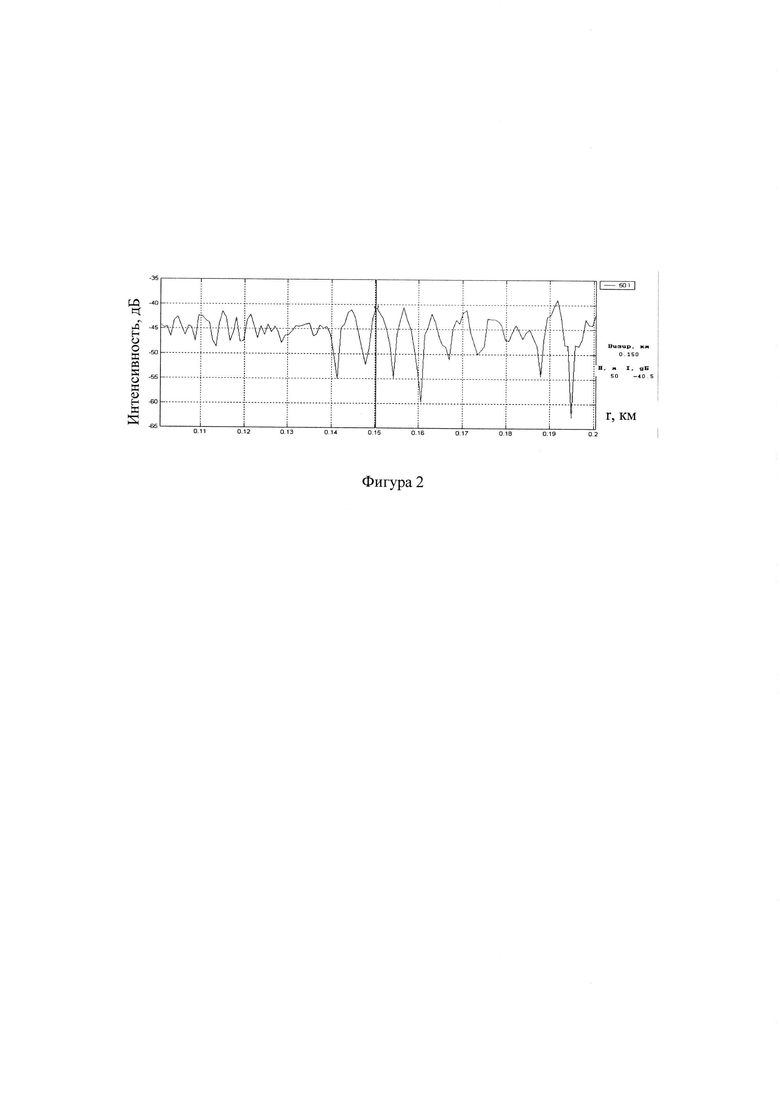
На фигуре 2 представлен расчет акустического поля от источника тонального сигнала в мелком море с использованием программы РПЗЭМС для расстояния до 200 м.
Как видно из фигур 1, 2 при изменении расстояния между излучателем и приемным гидрофоном в пределах зоны Френеля практически не происходит изменений максимальных значений звукового давления. Аналогичная картина будет наблюдаться и на других частотах.
Поэтому в условиях интерференционной структуры акустического поля мелководной акватории измерения проходной характеристики в виде временной диаграммы изменения уровня сигнала во времени на одиночный гидрофон малоэффективны.
Известен способ измерения шумоизлучения в мелком море при использовании разворачиваемой в акватории линейной решетки гидрофонов.
Комплекс для измерения уровня подводного шума - система измерения гидроакустического поля (СИ ГАП) «Нева - ИПФ» предназначен для измерения гидроакустических полей надводных и подводных кораблей на ходовых и стояночных режимах в условиях мелководных полигонов с глубинами до 300 метров. [Бармак А.С., Коротин П.И., Слижов А.Б., Турчин В.И, Чащин А.С. Комплекс для измерения параметров гидроакустического поля СИ ГАП «Нева-ИПФ» // Морская радиоэлектроника № 1, 2011 г.]
Целевое назначение комплекса СИГАП «Нева-ИПФ» - измерение уровня подводного шума кораблей на мелководных полигонах в присутствии шумов судоходства. СИГАП «Нева-ИПФ» использует разворачиваемую в акватории линейную решётку гидрофонов. Подавление помехи в СИГАП «Нева-ИПФ» осуществляется за счёт формирования характеристики направленности (ХН) линейной решёткой гидрофонов. [Руководство по эксплуатации комплекса СИ ГАП «Нева ИПФ» - Н. Новгород: ИПФ РАН, 2006].
Известно, что характеристика направленности (ХН) формируется в дальней зоне (Фраунгофера) антенны. При этом для формирования ХН на низких частотах размер антенны должен быть соизмерим с длиной волны, что требует больших её размеров.
Поэтому основной недостаток СИГАП заключается в том, что расстояние между антенной и морским объектом должно обеспечивать нахождение морского объекта в дальней зоне (Фраунгофера). Известно [Новиков А.К. Статистические измерения и обнаружение сигналов. - СПб.: ЦНИИ им. акад. А.Н. Крылова, 2006 г.], что граница дальнего поля источника и антенны определяется условием зоны Фраунгофера:

где Da - размер антенны;
Du - размер источника излучения;
λ - длина волны.
Следует отметить, что в мелководной акватории отражения сигнала шумоизлучения от границ акустического волновода (поверхности и дна моря) приводят к возникновению мнимых источников излучения. Это приводит к многократному увеличению размера источника излучения Du и как следствие к многократному увеличению зоны Френеля (интерференционной зоны акустического поля). В условиях мелкой акватории (глубина акватории от нескольких метров до десятка метров) и интерференционного поля (зоны Френеля) формирование ХН не будет происходить.
Поэтому недостатки этой системы заключаются в том, что:
- регистрация проходной характеристики малошумного и малоразмерного шумящего объекта в условиях мелководной акватории (глубина акватории от нескольких метров до десятка метров) в виде временной диаграммы изменения уровня сигнала во времени малоэффективна.
- низкая помехоустойчивость в условиях импульсных и пространственно коррелированных и флуктуационных шумовых помех.
Известен способ регистрации шумоизлучения малошумного морского объекта (Патент 2572052 Российской Федерации, МПК G01S 15/04. Способ регистрации малошумного морского объекта / Колмогоров B.C., Викторов Р.В., Шпак С.А., Омельченко А.В., Решетников Д.С.; патентообладатель Шпак С.А. - № 2014119095/28; заявл. 12.05.2014; опубл. 27.12.2015;
бюл. № 36).
Выбранный в качестве аналога способ устраняет существенный недостаток методов, описанных выше, а именно малую помехоустойчивость при применении в условиях нестационарности помехи в пределах времени регистрации прохода морского объекта.
При этом аналог обладает существенными недостатками:
- невозможность регистрации проходной характеристики в виде временной диаграммы изменения уровня сигнала во времени при использовании одиночного ненаправленного гидрофона в интерференционном поле мелководной акватории;
- снижение помехоустойчивости при применении в условиях помех импульсного характера и наличии случайных флуктуаций в тракте обработки сигналов.
Подавление импульсной помехи устранено другим известным способом регистрации малошумного морского объекта с использованием медианной фильтрации (Патент 2616357 Российской Федерации, МПК G01S 15/04. Способ регистрации малошумного морского объекта с использованием медианной фильтрации / Пономарев М.О., Колмогоров В.С., Шпак С.А., Викторов Р.В. - № 2016107561; заявл. 01.03.2016; опубл. 14.04.2017; бюл. № 11), который принят за прототип.
Способ регистрации малошумного морского объекта с использованием медианной фильтрации заключается в том, что сначала регистрируют в приемных устройствах «опорную» амплитудно-частотную характеристику (АЧХ) шумового поля водного пространства. После чего выполняют ее фильтрацию и аналого-цифровое преобразование в блоке первичной обработки сигналов, а затем используют в блоке расчета взаимно корреляционной функции и принятия решения блока вторичной обработки сигналов с целью определения, и выбора пары приемных устройств с максимальным значением коэффициентов взаимной корреляции между первым и вторым, первым и третьим, первым и N-м приемными устройствами. Затем «опорную» АЧХ подают на соответствующие входы адаптивного фильтра блока вторичной обработки сигналов, где вырабатывают «нормированную» АЧХ шумового поля охраняемого водного пространства. Далее при появлении малошумного морского объекта в охраняемом водном пространстве в области расположения приемных устройств формируют «рабочую» АЧХ водного пространства, которую через ранее выбранный первый приемный канал подают на первый вход блока расчета взаимно корреляционной функции и принятия решения, и первый вход адаптивного фильтра блока вторичной обработки сигналов. В случае превышения амплитуды «рабочей» АЧХ водного пространства над выработанным порогом «нормированной» АЧХ регистрируют АЧХ малошумного морского объекта. При этом в первом, втором и N-м приемных каналах блока первичной обработки сигналов после выполнения аналого-цифрового преобразования дополнительно осуществляют медианную фильтрацию посредством использования соответствующих медианных фильтров.
Данный способ обладает существенным недостатками:
- малоэффективен при регистрации проходной характеристики в виде временной диаграммы изменения уровня сигнала во времени при использовании одиночного ненаправленного гидрофона в интерференционном поле мелководной акватории (зоне Френеля);
- снижение помехоустойчивости при применении в условиях помех в виде случайных некоррелированных флуктуаций в тракте обработки сигналов.
На устранение описанных недостатков направлено заявленное изобретение, технической задачей которого является создание нового способа регистрации проходной характеристики морского объекта в условиях мелководной акватории и наличия импульсных, пространственно коррелированных и некоррелированных шумовых помех.
Регистрация проходной характеристики в предложенном способе производится при фиксированной кривизне базы вертикальной многоканальной антенной решетки (ВМАР). При этом в схеме обработки (при помощи адаптивного сумматора) в каждом канале ВМАР устанавливается задержка сигнала, соответствующая предполагаемой траверзной дистанции от морского объекта до каждого электроакустического приемника (измерительного гидрофона) ВМАР, т.е. создается база под определенную кривизну фронта принимаемой волны от измеряемого объекта. После прохода морского объекта отклик антенны уточняется по фактическому траверзному расстоянию ВМАР от морского объекта путем процедуры оптимизации и нахождения максимума целевой функции, т.е. суммы от всех приемников.
С целью проверки возможности формирования отклика антенны в виде характеристики направленности (ХН) в ближней зоне гидроакустической антенны было произведено имитационное моделирование с использованием программной среды С++.
На фигуре 3 показаны результаты имитационного моделирования многоэлементной антенны.
На фигуре 3а представлен расчет ХН (в декартовой и в полярной системах координат) и базы антенны при расположении источника звука в зоне Фраунгофера (дальней зоне). Поскольку фронт волны плоский и база антенны тоже плоская, то ХН формируется. При помещении источника звука в зону Френеля, происходит развал ХН (фигура 3б).
Как видно на фигуре 3в, использование процедуры оптимизации позволяет согласовать базу антенны и фронт волны (сфокусировать на источник сигнала) и сформировать ХН при нахождении источника звука в зоне Френеля.
Для процедуры оптимизации, к примеру, математический пакет программ в среде "Mathcad" предлагает две функции - «Maximize» и «Minimize».
С помощью функции «Maximize» (F, р1, р2, …, pn), где F - функция цели; р1, р2, …, pn - варьируемые параметры объекта оптимизации (уровни звукового давления с отдельных измерительных гидрофонов ВМАР) осуществляется поиск параметров, соответствующих максимуму функции F.
Для реализации алгоритма поиска максимального значения суммы сигналов от отдельных приемных электроакустических преобразователей, при которых значение отклика антенны будет максимальным, используется встроенная функция Maximize. При этом результат будет представлен в виде вектора значений, при которых целевая функция достигает максимума.
При многопараметрической оптимизации в основу решения заложен принцип градиентных численных методов, который состоит в последовательном приближении к экстремуму (максимальному значению суммы сигналов от отдельных измерительных гидрофонов ВМАР) с помощью нахождения градиента ∇F(p) непрерывно дифференцируемой целевой функции F(p). Он направлен в сторону наибольшего возрастания функции в данной точке. К примеру, Mathcad позволяет выбрать один из трех алгоритмов решения: сопряженных градиентов, квазиньютоновский или Левенберга-Маркарда.
Для компенсации помех в способе используются:
- медианные фильтры (подавление импульсных помех);
- фильтры скользящего среднего (подавление некоррелированных шумовых помех);
- адаптивный фильтр (компенсация пространственно коррелированных помех);
Перед компенсацией пространственно коррелированных помех производится подавление импульсных помех с использованием медианного фильтра и подавление некоррелированных шумовых помех с использованием фильтра скользящего среднего, как в блоке первичной обработки сигналов, так и в приемном канале опорных гидрофонов.
Для компенсации коррелированных помех производится прием сигнал + помеха на ВМАР и производится прием помехи на опорные гидрофоны опорных приемных каналов, расположенные на таком расстоянии, чтобы не принимать сигнал. На первый вход адаптивного фильтра поступает смесь сигнал + помеха с ВМАР, сфокусированной на источник шумоизлучения; на другой канал поступает помеха с одного из опорных гидрофонов. Перед подачей сигналов с ВМАР и опорного гидрофона производится процедура нормировки и центровки сигналов с целью выравнивания их по уровню.
Выбор опорного гидрофона из набора опорных гидрофонов для более эффективной компенсации коррелированной помехи производится по критерию максимума взаимно корреляционной функции по помехе между ВМАР и опорными гидрофонами (ВМАР и первым опорным гидрофоном, … ВМАР и K-м опорным гидрофоном) Вычисление взаимно-корреляционной функции по помехе между измерительным гидрофоном ВМАР и опорными гидрофонами производится в блоке расчета взаимно-корреляционной функции и принятия решения.
После медианной фильтрации, усреднения в фильтрах скользящего среднего и адаптивной фильтрации сигнал от ВМАР поступает на регистрирующее устройство, где происходит регистрация:
- проходной характеристики (уровня сигнала во времени);
- спектрограммы прохода (спектральной плотности сигнала во времени);
- спектрограммы амплитудной огибающей (уровня и частот дискретных составляющих вольно-лопастного звукоряда шумоизлучения морского объекта после амплитудного детектирования во времени).
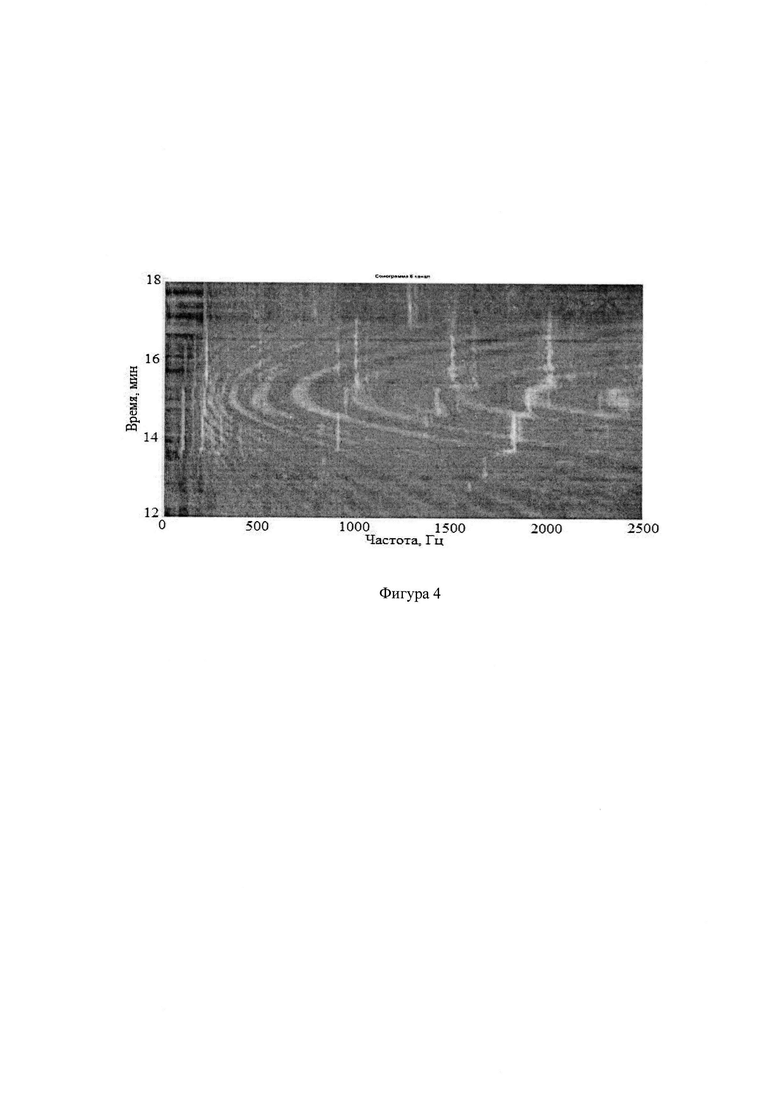
Регистрация спектрограммы прохода (спектральной плотности сигнала во времени) производится от одиночного измерительного гидрофона ВМАР. Пример регистрации проходной характеристики морского объекта в мелководной акватории в виде спектрограммы показан на
фигуре 4.
Из фигуры 4 видно, что в мелководной акватории наблюдается пространственная частотная интерференция, и уровни спектральных максимумов имеют одинаковые значения в пределах зоны интерференции
В качестве регистрирующего устройства может выступать комплекс регистрации и анализа сигналов типа «Кряква», который позволяет производить регистрацию перечисленных характеристик прохода морского объекта одновременно.
Реализация поставленной технической задачи позволяет добиться следующего технического результата:
- создан способ для регистрации проходной характеристики морского объекта в условиях мелководной акватории, с использованием ВМАР, что позволяет повысить помехоустойчивость при регистрации шумоизлучения морского объекта в условиях мелководной акватории и повышенного уровня импульсных помех от работы систем позиционирования морских объектов и фоновых шумовых помех (коррелированных и не коррелированных).
Способ регистрации проходной характеристики морского объекта в мелководной акватории, заключающийся в том, что сначала производят запись уровня шумоизлучения морского объекта и фоновых помех акватории при помощи приемных устройств, входящих в состав блока приема, с целью регистрации «опорного» и «измерительного» сигнала. После этого выполняют полосовую фильтрацию, аналогово-цифровое преобразование, медианную фильтрацию в блоке первичной обработки сигналов, а затем используют в блоке расчета взаимно корреляционной функции и принятия решения блока вторичной обработки сигналов, где определяют пару приемных каналов с максимальным значением коэффициента взаимной корреляции между измерительным приемным каналом и первым опорным приемным каналом, … измерительным приемным каналом и К-ым опорным приемным каналом. Затем выбранную пару каналов блока первичной обработки сигналов используют для подачи «измерительного» и «опорного» сигналов на соответствующие входы адаптивного фильтра блока вторичной обработки сигналов. После выполнения адаптивной фильтрации полученный сигнал используют в регистрирующем устройстве для регистрации проходной характеристики морского объекта, а также в амплитудном детекторе для выделения и дальнейшей регистрации дискретных составляющих вально-лопастного звукоряда морского объекта.
Принципиальным отличием заявленного способа от прототипа является то, что в качестве приемного устройства блока приема измерительного канала применяют вертикальную многоканальную антенную решетку (ВМАР) состоящую из N-измерительных гидрофонов, сигналы с которых параллельно поступают на дополнительно введенный адаптивный сумматор для суммирования и расчета максимума целевой функции (суммы сигналов), согласования и изменения фаз акустических сигналов ВМАР. Также после медианной фильтрации в блоке первичной обработки сигналов выполняют усредняющую фильтрацию «измерительного» и «опорных» сигналов посредством дополнительно введенных фильтров скользящего среднего.
Отличительный признак, применение ВМАР, позволяет использовать принципы пространственной фильтрации принятых сигналов в результате подстройки антенной решетки (ВМАР) под фронт принимаемых волн, возникающих в результате прохода движущегося морского объекта. Подстройка ВМАР осуществляется в результате применения адаптивного сумматора, служащего для адаптивной оптимизации путем расчета максимума целевой функции (суммы сигналов), согласования и изменения фаз акустических сигналов. Результатом применения ВМАР с адаптивным сумматором является возможность произвести регистрацию проходной характеристики морского объекта в условиях мелководной акватории.
Отличительный признак, дополнительное применение фильтров скользящего среднего после соответствующих медианных фильтров в блоке первичной обработки сигналов для выполнения усредняющей фильтрации «измерительного» и «опорных» сигналов, позволяет нивелировать воздействие некоррелированных помех при регистрации проходной характеристики морского объекта в условиях мелкого моря.
На фигуре 1 представлены результаты численного моделирования ближних зон Френеля гидроакустических излучателей различной формы: плоского круглого поршневого (1а) и плоского прямоугольного поршневого (1б).
На фигуре 2 представлен расчет акустического поля от источника тонального сигнала в мелком море с использованием программы РПЗЭМС для расстояния до 200 м.
На фигуре 3 показаны результаты имитационного моделирования многоэлементной антенны.
На фигуре 4 показан пример регистрации проходной характеристики морского объекта в мелководной акватории в виде спектрограммы.
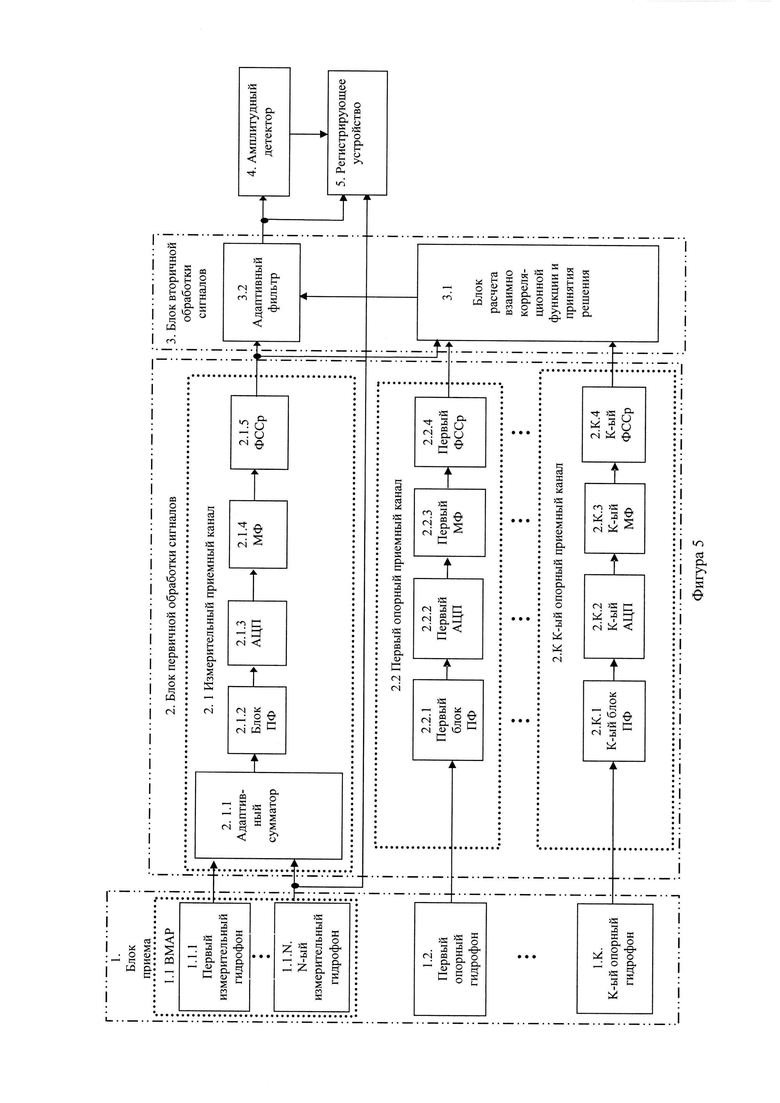
Предложенный способ реализуется в устройстве для регистрации проходной характеристики морского объекта в мелководной акватории с использованием вертикальной многоканальной антенной решетки. Схема устройства приведена на фигуре 5.
На схеме представлено:
1. Блок приема
1. 1 Вертикальная многоканальная антенная решетка (ВМАР)
1.1.1 Первый измерительный гидрофон
1.1.N. N-й измерительный гидрофон
1.2. Первый опорный гидрофон
1.К. К-ый опорный гидрофон
2. Блок первичной обработки сигналов
2.1 Измерительный приемный канал
2.1.1 Адаптивный сумматор
2.1.2 Блок полосовых фильтров (ПФ)
2.1.3 Аналогово-цифровой преобразователь (АЦП)
2.1.4 Медианный фильтр (МФ)
2.1.5 Фильтр скользящего среднего (ФССр)
2.2 Первый опорный приемный канал
2.2.1 Первый блок полосовых фильтров (ПФ)
2.2.2 Первый аналогово-цифровой преобразователь (АЦП)
2.2.3 Первый медианный фильтр (МФ)
2.2.4 Первый фильтр скользящего среднего (ФССр)
2.K. К-й опорный приемный канал
2.K.1 К-й блок полосовых фильтров (ПФ)
2.K.2 К-й аналогово-цифровой преобразователь (АЦП)
2.К.3 K-й медианный фильтр (МФ)
2.K.4 K-й фильтр скользящего среднего (ФССр)
3. Блок вторичной обработки сигналов
3.1 Блок расчета взаимно-корреляционной функции и принятия решения
3.2 Адаптивный фильтр
4. Амплитудный детектор
5. Регистрирующее устройство
Все конструктивные элементы в блоке приема 1, в блоке первичной обработки сигналов 2, в блоке вторичной обработки сигналов 3, а также амплитудный детектор 4, регистрирующее устройство 5 соединены электрическими связями.
В вертикальной многоканальной антенной решетке 1.1 используются идентичные измерительные гидрофоны 1.1…1.N, выход каждого из которых параллельно соединен с входом адаптивного сумматора 2.1.1, осуществляющего передачу принятого сигнала на вход блока полосовых фильтров 2.1.2 и затем на вход аналогово-цифрового преобразователя 2.1.3, выход которого поступает на вход медианного фильтра 2.1.4, с выхода медианного фильтра 2.1.4 на фильтр скользящего среднего 2.1.5, с последующей передачей на первый вход адаптивного фильтра 3.2 и на вход блока расчета взаимно-корреляционной функции и принятия решения 3.1 блока вторичной обработки сигналов 3.
Измерительный гидрофон 1.N из состава ВМАР (максимально близкий к глубине прохода морского объекта) соединен с входом регистрирующего устройства 5.
Выход каждого соответствующего идентичного опорного гидрофона 1.2…1.К блока приема 1 последовательно соединен с входом соответствующего блока полосовых фильтров 2.2.1...2.К.1, выход которого соединен с входом соответствующего аналогово-цифрового преобразователя 2.2.2...2.К.2, его выход последовательно соединен с соответствующим входом медианного фильтра 2.2.3…2.К.3, выходы соответствующих медианных фильтров последовательно соединены с входом соответствующего фильтра скользящего среднего 2.2.4…2.К.4 . Затем сигнал с выхода каждого фильтра скользящего среднего 2.2.4…2.К.4 поступает на соответствующие входы блока расчета взаимно-корреляционной функции и принятия решения 3.1 блока вторичной обработки сигналов 3.
Выход блока расчета взаимно корреляционной функции и принятия решения 3.1. последовательно подключается ко второму входу адаптивного фильтра 3.2, выход адаптивного фильтра 3.2 параллельно соединен с входом амплитудного детектора 4 и затем с входом регистрирующего устройства 5. Выход амплитудного детектора 4 в свою очередь соединен с входом регистрирующего устройства 5.
Осуществление способа
Для осуществления заявленного способа устройство регистрации проходной характеристики морского объекта в мелководной акватории снабжено общепринятым переносным или стационарным источником питания, расположенным на береговом посту или плавучем носителе.
В вертикальной многоканальной антенной решетке 1.1 используются идентичные измерительные гидрофоны 1.1.1…1.1.N с возможностью приема акустических сигналов в водной среде, выход каждого из которых параллельно соединен с входом адаптивного сумматора 2.1.1, служащего для расчета максимума целевой функции (суммы сигналов) согласования и изменения фаз акустических сигналов для последующей передачи на вход блока полосовых фильтров 2.1.2 для возможности пропускания передающегося электрического сигнала оптимальной полосы частот и передачи на вход аналогово-цифрового преобразователя 2.1.3 для преобразования сигнала из аналогового в цифровой вид, выход которого соединен с входом медианного фильтра 2.1.4 для исключения импульсной помехи, который в свою очередь соединен с фильтром скользящего среднего 2.1.5, используемого для снижения уровня флуктуаций за счет сглаживания некогерентной помехи, затем соединен с первым входом адаптивного фильтра 3.1. Перед подачей сигнала с измерительного приемного канала производится процедура нормировки и центровки сигналов с целью выравнивания их по уровню.
Один из измерительных гидрофонов 1.1.N из состава ВМАР (максимально близкий к глубине прохода морского объекта) соединен с входом регистрирующего устройства 5 для отображения спектральной плотности шумоизлучения (спектрограммы прохода) морского объекта.
Выход каждого соответствующего идентичного опорного гидрофона 1.2…1.К блока приема 1 последовательно соединен с входом соответствующего блока полосовых фильтров 2.2.1…2.К.1 для возможности пропускания передающегося электрического сигнала оптимальной полосы частот, выход которого в свою очередь соединен с входом аналогово-цифрового преобразователя 2.2.2…2.К.2, выходы которых соединены с входами медианных фильтров 2.2.3…2.К.3, для исключения импульсной помехи, выходы указанных медианных фильтров последовательно соединены с входом соответствующего фильтра скользящего среднего 2.2.4…2.К.4 для снижения уровня флуктуаций за счет сглаживания некогерентной помехи. Затем выход каждого фильтра скользящего среднего 2.2.4…2.К.4, параллельно соединен с соответствующими входами блока расчета взаимно-корреляционной функции и принятия решения 3.1 блока вторичной обработки сигналов 3. Перед подачей сигналов с опорных приемных каналов производится процедура нормировки и центровки сигналов с целью выравнивания их по уровню.
В блоке расчета взаимно корреляционной функции и принятия решения 3.1 производится вычисление и определение пары приемных каналов (измерительного и опорного) с максимальным значением коэффициентов корреляции между измерительным каналом и первым опорным приемным каналом, … измерительным каналом и К-м опорным приемным каналом. В зависимости от вычисленного значения соответствующий выход фильтра скользящего среднего опорного приемного канала 2.2.4…2.К.4 последовательно подключается через блок расчета взаимно-корреляционной функции и принятия решения 3.1 ко второму входу адаптивного фильтра 3.2, на выходе адаптивного фильтра 3.2 формируется проходная характеристика морского объекта, которая параллельно подается на вход регистрирующего устройства 5 для отображения временной диаграммы прохода и на вход амплитудного детектора 4, с целью выделения амплитудной модуляции огибающей проходной характеристики морского объекта. Выход амплитудного детектора 4 в свою очередь последовательно соединен с входом регистрирующего устройства 5 для отображения дискретных составляющих, возникших при проходе морского объекта.
Заявленный способ представляет значительный интерес для народного хозяйства, так как реализуемое данным способом устройство обеспечивает охрану биологических морских объектов. Заявленное решение не оказывает отрицательного воздействия на экологическое состояние окружающей среды.
Таким образом, заявленный «Способ регистрации проходной характеристики морского объекта в мелководной акватории» с использованием ВМАР является способом для оценки шумоизлучения морских объектов и для обеспечения поддержания акустического качества морских объектов в условиях мелководных акваторий с высоким уровнем промышленного и естественного фона помех.
Заявленный способ обладает следующими достоинствами:
- возможность регистрации проходной характеристики морского объекта в условиях интерференционной зоны Френеля;
- повышение помехоустойчивости средств регистрации проходной характеристики морского объекта за счет повышения уровня сигнала при использовании ВМАР и подавления импульсных, коррелированных и некоррелированных помех;
- контроль уровня дискретных составляющих ВЛЗР и динамики изменения их частоты.
Заявленный способ промышленно применим, так как для его осуществления используются широко распространенные компоненты и изделия радиотехнической промышленности и вычислительной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регистрации малошумного морского объекта с использованием медианной фильтрации | 2016 |
|
RU2616357C1 |
| Способ регистрации проходной характеристики морского объекта | 2021 |
|
RU2774731C1 |
| Способ регистрации уровня шумоизлучения морского объекта | 2017 |
|
RU2659186C1 |
| СПОСОБ РЕГИСТРАЦИИ МАЛОШУМНОГО МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2572052C2 |
| Интерференционный обнаружитель движущегося подводного морского объекта с медианной фильтрацией сигнала | 2023 |
|
RU2809350C1 |
| Обнаружитель движущихся подводных объектов на фоне биологического шума мелководной акватории, где обитают раки-щелкуны | 2021 |
|
RU2779380C1 |
| Многоэлементный интерференционный обнаружитель движущегося подводного объекта | 2024 |
|
RU2837998C1 |
| Способ регистрации шумоизлучения морского объекта | 2020 |
|
RU2746342C1 |
| Способ регистрации шумоизлучения морского подводного объекта | 2020 |
|
RU2746312C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ ОБНАРУЖИТЕЛЬ ДВИЖУЩЕГОСЯ МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2563140C1 |

Использование: изобретение относится к области гидроакустики, а именно к способу регистрации проходной характеристики морского объекта в мелководной акватории в широкой полосе частот, и может быть использовано при измерении первичного гидроакустического поля морских объектов в условиях нестационарности помех в пределах времени регистрации прохода морского объекта и повышенного уровня случайных выбросов фоновых шумов мелководной морской акватории. Сущность: в способе регистрации проходной характеристики морского объекта в мелководной акватории сначала производят запись уровня шумоизлучения морского объекта и фоновых помех акватории при помощи приемных устройств, входящих в состав блока приема с целью регистрации «опорного» и «измерительного» сигналов. После этого выполняют полосовую фильтрацию, аналого-цифровое преобразование, медианную фильтрацию в блоке первичной обработки сигналов, а затем используют в блоке расчета взаимно корреляционной функции и принятия решения блока вторичной обработки сигналов, где определяют пару приемных каналов с максимальным значением коэффициента взаимной корреляции между измерительным приемным каналом и первым опорным приемным каналом, … измерительным приемным каналом и К-м опорным приемным каналом. Затем выбранную пару каналов блока первичной обработки сигналов используют для подачи «измерительного» и «опорного» сигналов на соответствующие входы адаптивного фильтра блока вторичной обработки сигналов. После выполнения адаптивной фильтрации полученный сигнал используют в регистрирующем устройстве для регистрации проходной характеристики морского объекта, а также в амплитудном детекторе для выделения и дальнейшей регистрации дискретных составляющих вально-лопастного звукоряда морского объекта. При этом в качестве приемного устройства блока приема для измерительного канала применяют вертикальную многоканальную антенную решетку (ВМАР), состоящую из N измерительных гидрофонов, сигналы с которых параллельно поступают на дополнительно введенный адаптивный сумматор, служащий для подстройки ВМАР путем расчета максимума целевой функции (суммы сигналов), согласования и изменения фаз акустических сигналов. Также после медианной фильтрации в блоке первичной обработки сигналов выполняют усредняющую фильтрацию «измерительного» и «опорных» сигналов посредством дополнительно введенных фильтров скользящего среднего. Технический результат: возможность регистрации проходной характеристики морского объекта в условиях мелководной акватории, повышение помехоустойчивости при регистрации шумоизлучения морского объекта и одновременное подавление как импульсных помех, пространственно-коррелированных помех, так и некогерентных составляющих случайной помехи, присутствующих в мелководной акватории. 5 ил.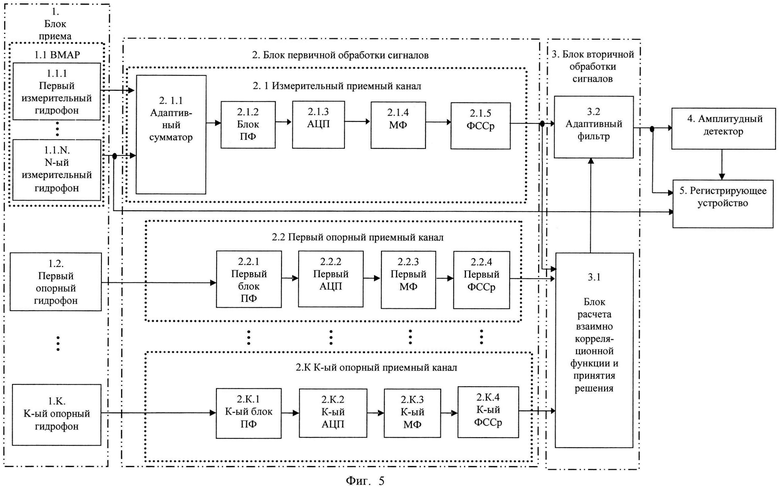
Способ регистрации проходной характеристики морского объекта в мелководной акватории, заключающийся в том, что сначала производят запись уровня шумоизлучения морского объекта и фоновых помех акватории при помощи приемных устройств, входящих в состав блока приема, с целью регистрации «опорного» и «измерительного» сигналов, после этого выполняют полосовую фильтрацию, аналого-цифровое преобразование, медианную фильтрацию в блоке первичной обработки сигналов, а затем используют в блоке расчета взаимно корреляционной функции и принятия решения блока вторичной обработки сигналов, где определяют пару приемных каналов с максимальным значением коэффициента взаимной корреляции между измерительным приемным каналом и первым опорным приемным каналом, … измерительным приемным каналом и К-м опорным приемным каналом; затем выбранную пару каналов блока первичной обработки сигналов используют для подачи «измерительного» и «опорного» сигналов на соответствующие входы адаптивного фильтра блока вторичной обработки сигналов, после выполнения адаптивной фильтрации полученный сигнал используют в регистрирующем устройстве для регистрации проходной характеристики морского объекта, а также в амплитудном детекторе для выделения и дальнейшей регистрации дискретных составляющих вально-лопастного звукоряда морского объекта, отличающийся тем, что в качестве приемного устройства блока приема для измерительного канала применяют вертикальную многоканальную антенную решетку (ВМАР), состоящую из N измерительных гидрофонов, сигналы с которых параллельно поступают на дополнительно введенный адаптивный сумматор, служащий для расчета максимума целевой функции (суммы сигналов), согласования и изменения фаз акустических сигналов ВМАР, а также после медианной фильтрации в блоке первичной обработки сигналов выполняют усредняющую фильтрацию «измерительного» и «опорных» сигналов посредством дополнительно введенных фильтров скользящего среднего.
| Способ регистрации уровня шумоизлучения морского объекта | 2017 |
|
RU2659186C1 |
| СПОСОБ РЕГИСТРАЦИИ МАЛОШУМНОГО МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2572052C2 |
| Способ регистрации малошумного морского объекта с использованием медианной фильтрации | 2016 |
|
RU2616357C1 |
| Способ обнаружения шумящих в море объектов | 2018 |
|
RU2694782C1 |
| Haru Matsumoto, D | |||
| R | |||
| Bohnenstiehl, A vertical hydrophone array coupled via inductive modem for detecting deep-ocean seismic and volcanic sources, Conference Paper, Conference: OCEANS 2010, October 2010, Source: IEEE Xplore. | |||

