Область техники, к которой относится изобретение
Изобретение относится к области радиотехники, в частности к модулям для автоматического регулирования положения навигационной антенны и может быть использована для создания электронных карт сельскохозяйственных угодий при их наземном объезде с помощью транспортных средств.
Уровень техники
Известно устройство для оцифровки сельскохозяйственных угодий фирмы Agricon, включающее в себя опорную станину, закрепляемую на открытой поверхности транспортного средства (капот, крыша), к которой жестко крепится штанга, ориентированная на 90° по направлению к движению транспортного средства, при чем ориентация в правую или левую сторону выполняется вручную поворотом станины перед началом выполнения работ, а на конце штанги расположена платформа для установки навигационной антенны (см.www.agrofys.ru).
Недостатками такого устройства является невозможность автоматического регулирования положения навигационной антенны в зависимости от постоянно изменяющейся границы оцифровываемых сельскохозяйственных угодий, что приводит к большой погрешности при выполнении работ, а также невозможность перевода навигационной антенны в рабочее положение из транспортного и обратно в процессе движения без остановки транспортного средства.
Известно опорно-поворотное устройство для автоматической корректировки положения GPS - антенны содержащее опорную станину с установленными в подшипниковых узлах и вращаемый электродвигателем поворотный диск, на котором размещена неподвижная штанга, внутри которой при помощи ходовой гайки и ходового винта, вращаемого электродвигателем неподвижной штанги, перемещается подвижная цельная штанга с закрепленной на её конце платформой с GPS-антенной и Laser-пилотом, соединенные проводами с контрольно-управляющим устройством, расположенным в транспортном средстве. (см. патент на полезную модель RU № 131240, МПК H01Q 3/08, опубл.10.08.2013, бюл.22).
Недостатками данного устройства является недостаточный вылет подвижной штанги с установленными на ее конце GPS - антенной и Laser - пилотом, ограниченной размерами неподвижной штанги, что приводит к необходимости располагать транспортное средство при движении в непосредственной близости к границе оцифровываемого участка, в результате чего возникает опасность столкновения с возможными препятствиями.
Наиболее близким по технической сущности и достигаемому положительному эффекту и принятое авторами за прототип является устройство для автоматического регулирования положения GPS-антенны, содержащее опорную станину, из продольных и поперечных балок жестко прикрепляемую, механизмом крепления, к транспортному средству и передвижную рамку из жестко закрепленных между собой верхней и нижней перемычек с вертикальными стойками, с установленной на верхней перемычке поворотной балки с электрическим линейным механизмом с выдвижным штоком и платформой для установки GPS-антенны и Laser-пилота, осуществляющая поворот при помощи электрического мотор-редуктора, закрепленного на нижней стороне верхней перемычки передвижной рамки, которая перемещается по штокам круглого сечения, установленным в упорах на верхних сторонах поперечных балок опорной станины и направляющих на внутренних частях вертикальных стоек передвижной рамки, которая перемещается при вращения зубчатого колеса электрического мотора - редуктора, расположенного на верхней части нижней перемычки передвижной рамки, находящегося в зацеплении с зубчатой планкой, закрепленной на внутренней верхней части поперечной балки опорной станины, электрические моторы - редукторы вращения зубчатого колеса и поворота поворотной балки, а также электрический линейный механизм с выдвижным штоком соединены с контрольно - управляющим устройством, расположенном в транспортном средстве (см. патент на изобретение RU №2725637, МПК H01Q 3/08, опубл. 03.07.2020, бюл. №19).
Недостатком данного устройства является высокие требования к точности изготовления и монтажа зубчатой передачи колесо - планка, невозможность плавности перемещения передвижной рамки при абразивном износе зубчатой передачи колесо - планка.
Раскрытие изобретения
Задачей предлагаемого изобретения является разработка устройства для автоматического перемещения навигационной антенны для оцифровки местности при выполнении рабочего процесса электронного картирования местности над границей оцифровываемого участка, обладающего возможностью автоматического перемещения положения навигационной антенны, надежности и стабильности выполнения рабочего процесса, увеличением точности оцифровки сельскохозяйственных угодий и скорости, как подготовки оборудования, так и непосредственно проведения работ без остановки движения транспортного средства.
Технический результат, который может быть достигнут с помощью предлагаемой полезной модели, сводится к возможности автоматического перемещения навигационной антенны, которая размещается над границей оцифровываемого участка независимо от перемещения транспортного средства, тем самым повышается точность оцифровки сельскохозяйственных угодий и скорость подготовки оборудования и проведения работ без остановки движения транспортного средства при выполнении рабочего процесса электронного картирования сельскохозяйственных угодий над границей оцифровываемого участка.
Технический результат достигается с помощью устройства для автоматического перемещения навигационной антенны для оцифровки местности, включающего опорную станину из жестко соединенных между собой продольных и поперечных балок с механизмом крепления к транспортному средству и передвижную рамку из верхней и нижней перемычек, вертикальных стоек жестко закрепленными между собой, с установленной на верхней перемычке поворотной балки с электрическим линейным механизмом с выдвижным штоком и платформой для установки навигационной - антенны и Laser-пилота, осуществляющая поворот при помощи электрического мотора-редуктора, закрепленного на нижней стороне верхней перемычки передвижной рамки, которая перемещается по штокам круглого сечения, установленным в упорах на наружных сторонах поперечных балок опорной станины и направляющих на внутренних сторонах вертикальных стоек передвижной рамки и механизма ее перемещения, включающего мотор-редуктор с приводной звездочкой, расположенных вместе с направляющими звездочками на опорной пластине и цепи жестко закрепленной с одной стороны к опоре на верхней средней части продольной балке, а с другой присоединена также к опоре на верхней средней части противоположной продольной балки, через натяжную пружину, электрические моторы-редукторы вращения приводной звездочки и поворотной балки, а также электрический линейный механизм с выдвижным штоком соединены с контрольно - управляющим устройством, расположенном в транспортном средстве.
Краткое описание чертежей
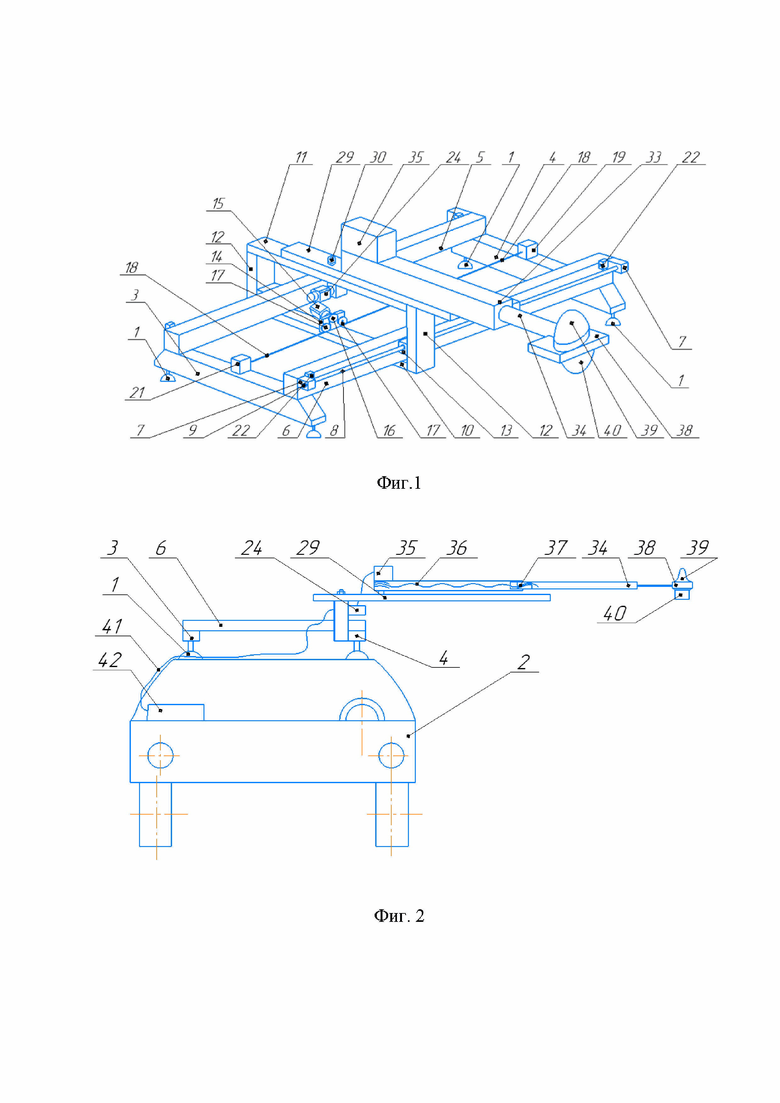
На фиг. 1 - дано устройство для автоматического перемещения навигационной антенны для оцифровки местности, общий вид;
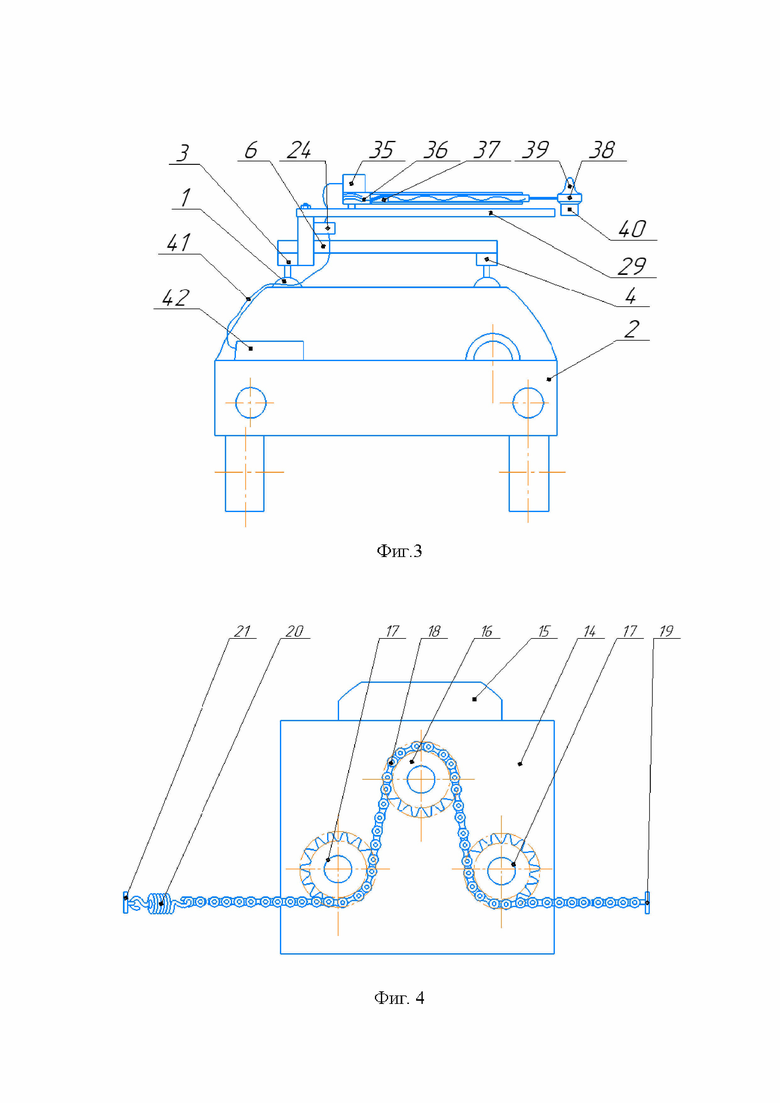
На фиг. 2 - то же общий вид в рабочем положении на транспортном средстве;
На фиг. 3 - то же общий вид в транспортном положении на транспортном средстве;
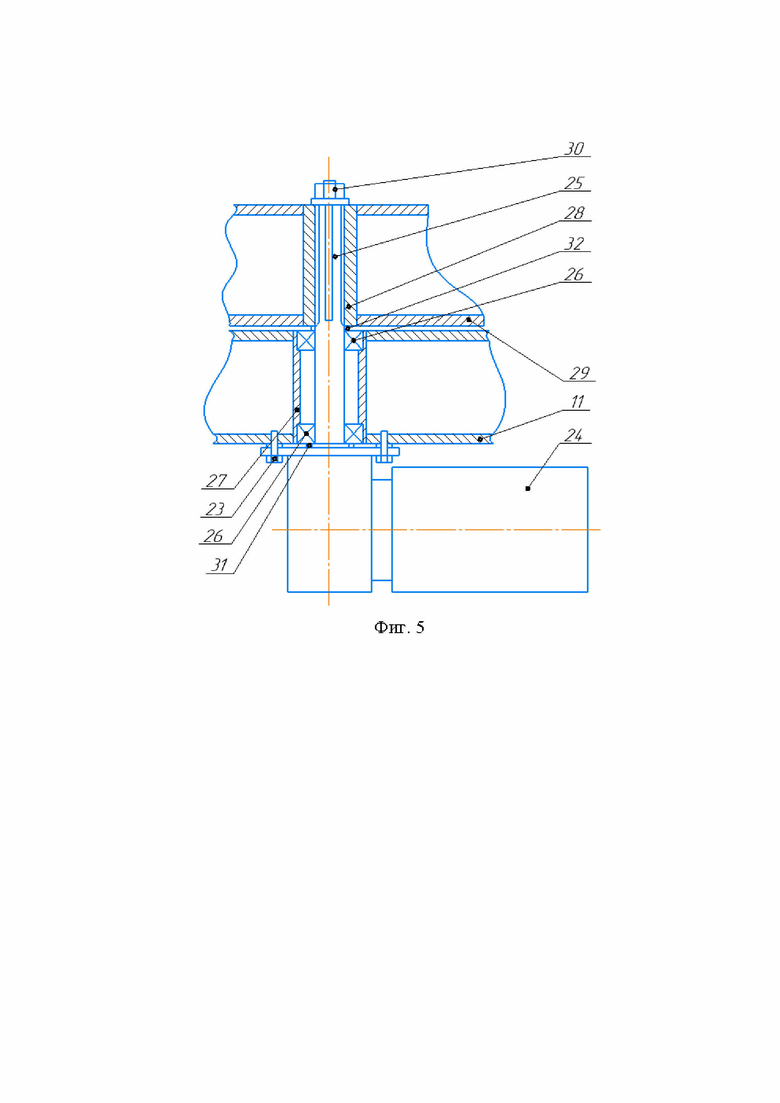
На фиг. 4 - то же механизм перемещения передвижной рамки;
На фиг. 5 - то же механизм вращения поворотной балки.
Осуществление изобретения
Устройство для автоматического перемещения навигационной антенны с помощью механизма крепления 1 устанавливается на транспортное средство 2 включает в себя опорную станину жестко соединенных между собой продольных 3, 4 и поперечных 5, 6 балок, на которых с наружной стороны по краям расположены упоры 7, между которыми установлен шток 8 круглого сечения, закрепленный с двух сторон гайками 9 и передвижную рамку (на фиг. не обозначена), выполненную из нижней и верхней перемычек 10 и 11 соответственно и стоек 12 жестко соединенных между собой, с внутренней стороны закрепленными направляющими 13, в которых предусмотрены сквозные отверстия (на фиг. не обозначено) круглого сечения для перемещения по штоку 8. На верхней части нижней перемычки 10 закреплена опорная станина 14, на которой закреплен мотор - редуктор 15 с приводной звездочкой 16 на валу ? и вращающиеся направляющие звездочки 17, связанные цепью 18, одним концом которая жестко прикреплена к стойке 19 на верхней средней части продольной балки 4, а вторым концом также закреплена через натяжную пружину 20, для исключения провисания цепи, на стойке 21 на противоположной продольной балке 3 в средней верхней части. На наружных частях поперечных передней и задней балок 5 и 6 соответственно прикреплены концевые выключатели 22.
На нижней стороне верхней перемычки 11 в средней части при помощи болтов 23 присоединен электрический мотор - редуктор 24, вал 25 которого проходит через подшипники 26, закрепленные во втулке 27, шлицевое окончание которого вставлено в шлицевую втулку 28 поворотной балки 29 и закреплен гайкой 30. Между мотором - редуктором 24 верхней перемычкой 11 и поворотной балкой 29 установлены шайбы 31 и 32.
На поворотной балке 29 закреплен электрический линейный механизм 33, с выдвижным штоком 34, приводящийся в движение при помощи электрического мотора - редуктора 35, вращающего винта 36 и гайки 37. На конце выдвижного штока 34 расположена платформа 38, на которой размещены навигационная антенна 39 и Laser-пилот (сонар) 40. Навигационная антенна 39, Laser-пилот (сонар) 40, электрические моторы-редукторы 15, 24 и 35 электрическими проводами 41 соединены с контрольно-управляющим устройством 42, располагающимся в кабине транспортного средства 2.
Устройство для автоматического регулирования положения навигационной антенны работает следующим образом.
Перед началом выполнения работы, с помощью механизма крепления 1 продольных балок 3 и 4, скрепленная поперечными передней и задней балками 5 и 6 соответственно, опорная станина закрепляется на открытой поверхности транспортного средства 2. В зависимости от расположения границы оцифровываемого участка местности передвижная рамка из нижней, верхней перемычек 10 и 11 соответственно и стоек 12 перемещается вправо или влево в результате поступающего сигнала по электрическим проводам 41 из контрольно-управляющего устройства 42, расположенного в кабине транспортного средства 2 в зависимости от местонахождения границы оцифровываемого участка. В результате вращения приводной звездочки 16 на вале электрического мотора - редуктора 15, закрепленного на опорной станине 14, начинает перемещаться цепь 18, по вращающимся направляющим звездочкам 17, и в результате того, что цепь 18 одним концом закреплена на стойке 19 в средней верхней части продольной балки 4, а другим, через натяжную пружину 20, прикреплена к стойке 21 на противоположной продольной балке 3, в средней ее части, начинает перемещается передвижная рамка в одну или другую сторон. Передвижная рамка без перекосов равномерно перемещается по направляющим 13 вдоль штока 8, закрепленного в упорах 7 гайками 9. Достигнув крайнего положения, стойки 12 прижимают концевые выключатели 19, тем самым размыкая электрическую цепь и вращение вала электрического мотора - редуктора 15 прекращается, сигнал по электрическим проводам 41 подается на контрольно - управляющее устройство 42 и передвижная рамка останавливается, также по электрическим проводам 41 поступает сигнал из контрольно-управляющего устройства 42, расположенного в кабине транспортного средства 2 и вал 25 электрического мотор - редуктора 24, жестко прикрепленного через шайбы 31 и 32 болтами 23, поворачивается в подшипниках 26, расположенных в жестко закрепленных втулке 27 верхней перемычке 11, вместе со шлицевой втулкой 28 начинает вращаться поворотная балка 29, с жестко закрепленной в ней шлицевой втулкой 28, при помощи шлицевых соединений на вале 25 и прижатой гайкой 30. Достигнув угла 90 градусов вращение вала 25 электрического мотор - редуктора 24 прекращается и поворотная балка 29 занимает перпендикулярное положение по отношению к движению транспортного средства 2. Для дальнейшего увеличения вылета навигационной антенны 39 и Laser-пилота (сонара) 40, закрепленных на платформе 38 выдвижного штока 34, на электрический мотор-редуктор 35 электрического линейного механизма 33 также поступает сигнал по электрическим проводам 41 из контрольно - управляющего устройства 42, расположенного в кабине транспортного средства 2 и при помощи вращающегося винта 36 и гайки 37 выдвижной шток 34 выдвигается и занимает необходимое положение. В зависимости от наличия препятствий Laser-пилот (сонар) 40 получает отраженный сигнал, направляет его по электрическим проводам 41 в контрольно-управляющее устройство 42, там он обрабатывается и посылается сигнал на электрические мотор-редукторы 15, 24 и 35, которые вращаясь размещают навигационную антенну 39 над границей оцифровываемого участка избегая поломку от взаимодействия с препятствием.
После окончания работы поступают сигналы на электрические моторы - редукторы 15, 24 и 35, рабочие органы совершают обратное перемещение и устройство переводится в транспортное положение.
По сравнению с прототипом и другими техническими решениями полезная модель имеет преимущества:
- повышается плавность перемещения передвижной рамки, что отражается на стабильности и надежности выполнения рабочего процесса.
Таким образом, заявленное устройство для автоматического регулирования положения навигационной антенны для оцифровки местности обеспечивает повышение точности оцифровки сельскохозяйственных угодий, повышение надежности и стабильности выполнения рабочего процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РЕГУЛИРОВКИ МЕСТОПОЛОЖЕНИЯ НАВИГАЦИОННОЙ АНТЕННЫ | 2023 |
|
RU2810673C1 |
| Установка к транспортному средству для оцифровки сельскохозяйственных угодий | 2024 |
|
RU2841484C1 |
| Установка к транспортному средству для электронного картирования полей сельскохозяйственного назначения в геоинформационных агротехнологиях | 2024 |
|
RU2841050C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ GPS-АНТЕННЫ | 2020 |
|
RU2725637C1 |
| СПАСАТЕЛЬНАЯ МАШИНА ДЛЯ ЭВАКУАЦИИ ЛЮДЕЙ С ВЫСОТНЫХ ЗДАНИЙ | 2012 |
|
RU2506101C1 |
| РОБОТИЗИРОВАННЫЙ ВЕЗДЕХОДНЫЙ КОМПЛЕКС ДЛЯ ХРАНЕНИЯ И ОТПУСКА ПРОДУКЦИИ | 2022 |
|
RU2787095C1 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| УНИВЕРСАЛЬНЫЙ АВТОЖИР | 2013 |
|
RU2543471C2 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2001 |
|
RU2200359C1 |
| Передвижной стенд для ремонта думпкаров | 1989 |
|
SU1673239A1 |
Изобретение относится к информационно-измерительным системам и может быть использовано для дистанционного мониторинга параметров хранения зерна в зерновой насыпи в складах напольного хранения и автоматизации управления параметрами хранения зерна. Сущность заявленного решения заключается в том, что устройство для автоматического перемещения навигационной антенны для оцифровки местности содержит опорную станину с механизмом крепления к транспортному средству, передвижную рамку с поворотной балкой, электрический линейный механизм с выдвижным штоком и платформой для установки навигационной антенны и Laser - пилота, контрольно-управляющее устройство, механизм перемещения подвижной рамки из электрического мотора–редуктора на пластине с зубчатым колесом и зубчатой планки под ним, закрепленной на внутренней верхней части поперечной балки опорной станины, при этом механизм перемещения подвижной рамки состоит из мотора–редуктора со звездочкой на валу, установленного на опорной пластине, с направляющими вращающимися звездочками, которые связаны цепью, закрепленной с опорами на продольных балках. Техническим результатом при реализации заявленного решения является автоматическое перемещение навигационной антенны, которая размещается над границей оцифровываемого участка независимо от перемещения транспортного средства, тем самым повышается точность оцифровки сельскохозяйственных угодий и скорость подготовки оборудования и проведения работ без остановки движения транспортного средства при выполнении рабочего процесса электронного картирования сельскохозяйственных угодий над границей оцифровываемого участка. 2 з.п. ф-лы, 5 ил.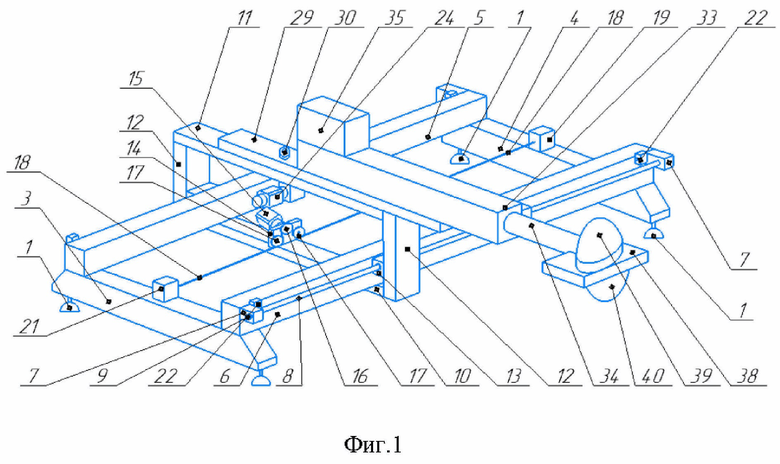
1. Устройство для автоматического перемещения навигационной антенны для оцифровки местности, содержащее опорную станину с механизмом крепления к транспортному средству, передвижную рамку с поворотной балкой, электрический линейный механизм с выдвижным штоком и платформой для установки навигационной антенны и Laser-пилота, контрольно-управляющее устройство, механизм перемещения подвижной рамки из электрического мотора–редуктора на пластине с зубчатым колесом и зубчатой планки под ним, закрепленной на внутренней верхней части поперечной балки опорной станины, отличающееся тем, что, механизм перемещения подвижной рамки состоит из мотора–редуктора со звездочкой на валу, установленного на опорной пластине, с направляющими вращающимися звездочками, которые связаны цепью, закрепленной с опорами на продольных балках.
2. Устройство для автоматического регулирования положения навигационной антенны для оцифровки местности по п. 1, отличающееся тем, что опорная пластина установлена в центральной части нижней перемычки подвижной рамки, опоры для крепления цепи установлены в центральной верхней части продольных балок.
3. Устройство для автоматического регулирования положения навигационной антенны для оцифровки местности по п. 1, отличающееся тем, что цепь одним концом жестко прикреплена к опоре, расположенной на продольной балке, а другим концом прикреплена к опоре, находящейся на противоположной балке через натяжную пружину.
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ GPS-АНТЕННЫ | 2020 |
|
RU2725637C1 |
| Приспособление для заточки лезвий лап культиваторов, лемехов плугов и т.п. непосредственно на почвообрабатывающей машине | 1960 |
|
SU131240A1 |
| CN 114257297 B, 14.06 | |||
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |
| CN 210430121 U, 28.04.2020. | |||
