Область техники, к которой относится изобретение
Изобретение относится к области радиотехники, в частности к устройству для автоматического регулирования положения GPS-антенны и может быть использовано при оцифровке местности транспортным средством.
Уровень техники
Известно опорное устройство GPS-антенны содержащее платформу, жестко закрепляемую на открытой поверхности транспортного средства посредством магнита, к которой крепится GPS-антенна. (см. www.trimbie.ru).
Недостатками такого устройства является постоянная необходимость маневрирования транспортным средством для обеспечения расположения GPS-антенны непосредственно на границе оцифровываемого участка местности, хотя это не всегда возможно выполнить из-за возникающих препятствий, что приводит к большим погрешностям при выполнении работ.
Известно опорное устройство GPS-антенны для оцифровки местности фирмы Agricon, включающее в себя опорную станину, закрепляемый на открытой поверхности транспортного средства (капот, крыша), к которой жестко крепится штанга, ориентированная на 90° по направлению к движению транспортного средства, при чем ориентация в правую или левую сторону выполняется вручную поворотом станины перед началом выполнения работ, а на конце штанги расположена платформа для установки GPS-антенны (см.www.agrofys.ru).
Недостатками такого устройства является невозможность автоматического регулирования положения GPS-антенны в зависимости от постоянно изменяющейся границы оцифровываемого участка местности, что приводит к большой погрешности при выполнении работ, а также невозможность перевода GPS-антенны в рабочее положение из транспортного и обратно в процессе движения без остановки транспортного средства.
Наиболее близким по технической сущности и достигаемому положительному эффекту и принятое авторами за прототип является опорно-поворотное устройство для автоматической корректировки положения GPS-антенны содержащее опорную станину с установленными в подшипниковых узлах и вращаемый электродвигателем поворотный диск, на котором размещена неподвижная штанга, внутри которой при помощи ходовой гайки и ходового винта, вращаемого электродвигателем неподвижной штанги, перемещается подвижная цельная штанга с закрепленной на ее конце платформой с GPS-антенной и Laser-пилотом, соединенные проводами с контрольно-управляющим устройством, расположенным в транспортном средстве, (см. патент на полезную модель RU №131240, МПК H01Q 3/08, опубл. 10.08.2013, бюл. 22).
Недостатками данного устройства является недостаточный вылет подвижной штанги с установленными на ее конце GPS-антенной и Laser-пилотом, ограниченной размерами неподвижной штанги, что приводит к необходимости располагать транспортное средство при движении в непосредственной близости к границе оцифровываемого участка, в результате чего возникает опасность столкновения с возможными препятствиями.
Раскрытие изобретения
Задачей предлагаемого изобретения является разработка устройства для автоматического регулирования положения GPS-антенны, обладающего возможностью корректировки положения антенны, повышением точности оцифровки местности и скорости, как при подготовке оборудования, так и при непосредственном проведении работ при осуществлении движения транспортного средства, оборудованного GPS-антенной и Laser-пилотом, при выполнении рабочего процесса электронного картирования местности на удалении от границы оцифровываемого участка.
Технический результат, который может быть достигнут с помощью предлагаемого изобретения, сводится к возможности корректировки положения антенны, повышению точности оцифровки местности и скорости, как при подготовке оборудования, так и при непосредственном проведении работ при осуществлении движения транспортного средства, оборудованного GPS-антенной и Laser-пилотом, при выполнении рабочего процесса электронного картирования местности на удалении от границы оцифровываемого участка.
Технический результат достигается с помощью устройства для автоматического регулирования положения GPS-антенны, включающего опорную станину, жестко соединенную с помощью двух продольных балок с механизмом крепления к транспортному средству и с жестко закрепленными верхней и нижней перемычками, причем на верхней части последней закреплена пластина с установленным электрическим мотор - редуктором, поворотную балку, электрический линейный механизм с выдвижным штоком и платформой для установки GPS-антенны и Laser -пилота, при этом GPS-антенна и Laser -пилот, электрический мотор - редуктор, электрический линейный механизм с выдвижным штоком соединены с контрольно управляющим устройством, расположенном в транспортном средстве, причем, оно дополнительно снабжено передвижной рамкой, выполненной из верхней и нижней перемычек, установленной на опорной станине, вторым и третьим мотор - редукторами, при этом на нижней стороне верхней перемычки в средней части через распорные втулки установлен второй электрический мотор - редуктор, а электрический третий мотор - редуктор установлен на выдвижном штоке электрического линейного механизма закрепленного на поворотной балке, а передвижная рамка установлена с возможностью перемещения при помощи вращения зубчатого колеса электрического мотор-редуктора, расположенного на нижней перемычке, находящегося в зацеплении с зубчатой планкой, закрепленной на задней верхней части поперечной балки опорной станины.
Передвижная рамка установлена с возможностью перемещения по штоку круглого сечения, установленному в упорах на наружной стороне поперечных балок опорной станины и направляющих на стойках передвижной рамки, при этом на упорах на крайних наружных частях поперечной балки установлены концевые выключатели с возможностью ограничения перемещения передвижной рамки и отключения вращения электрического мотор - редуктора передвижной рамки
Краткое описание чертежей
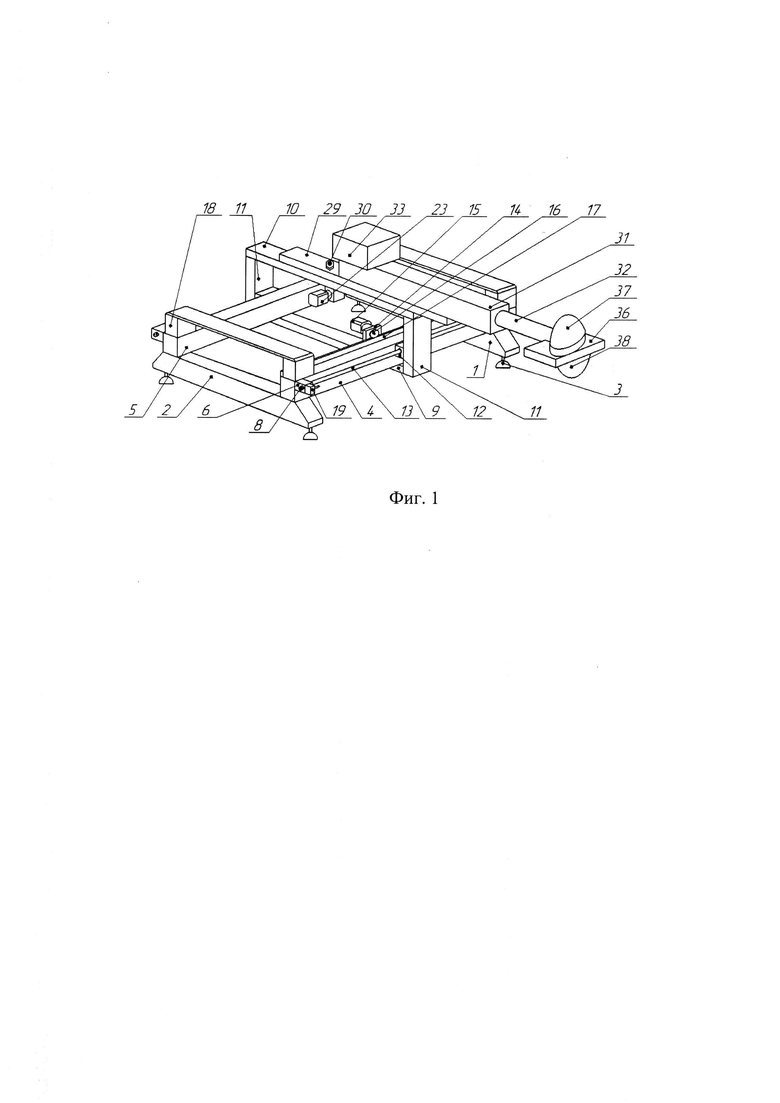
На фиг. 1 - дано устройство для автоматического регулирования положения GPS-антенны, общий вид;
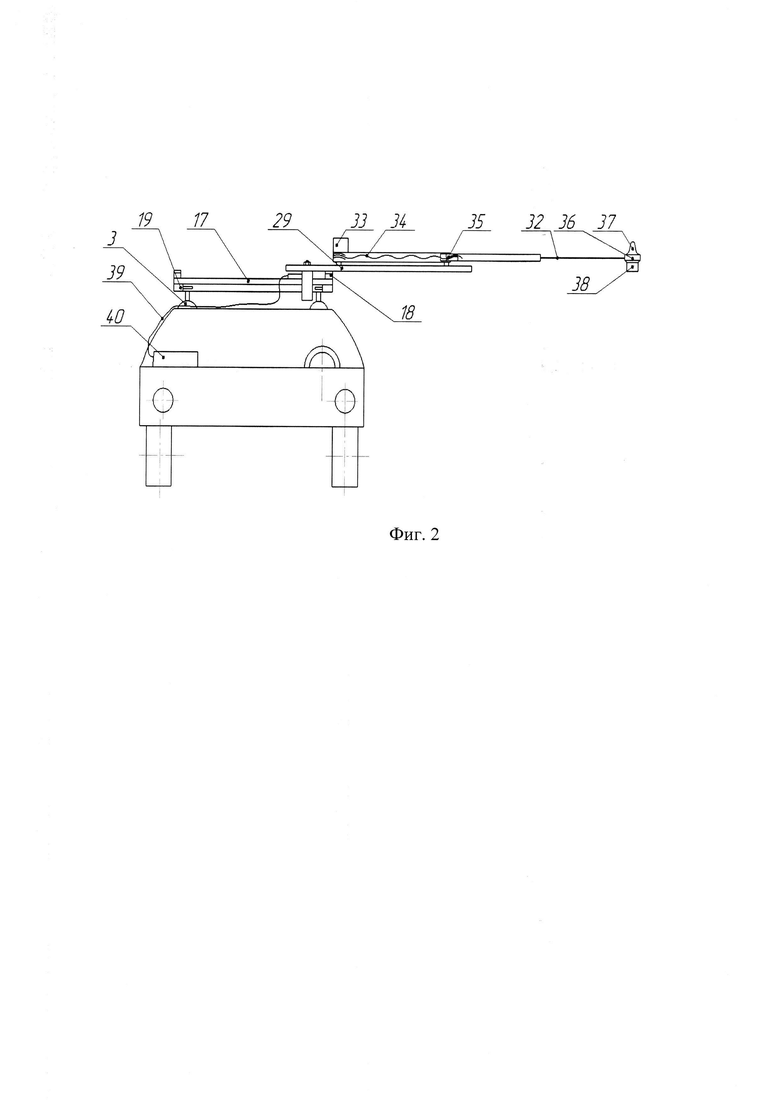
На фиг. 2 - то же общий вид в рабочем положении на транспортном средстве;
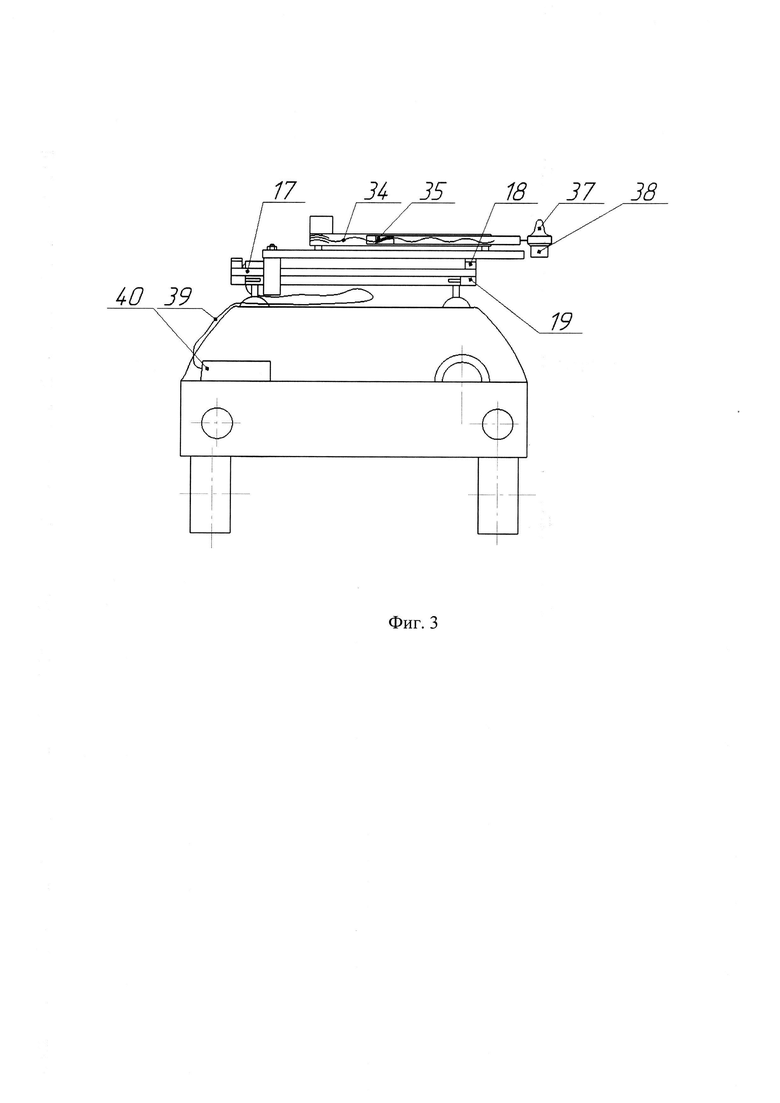
На фиг. 3 - то же общий вид в транспортном положении на транспортном средстве;
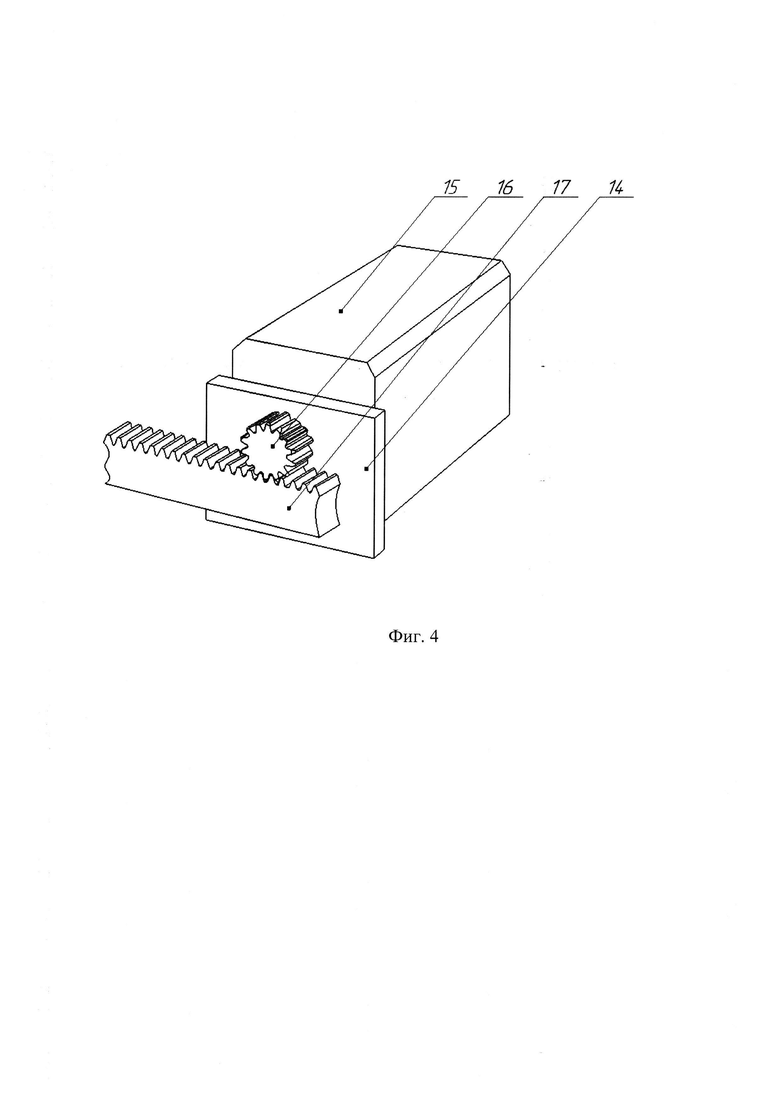
На фиг. 4 - то же передвижная рамка;
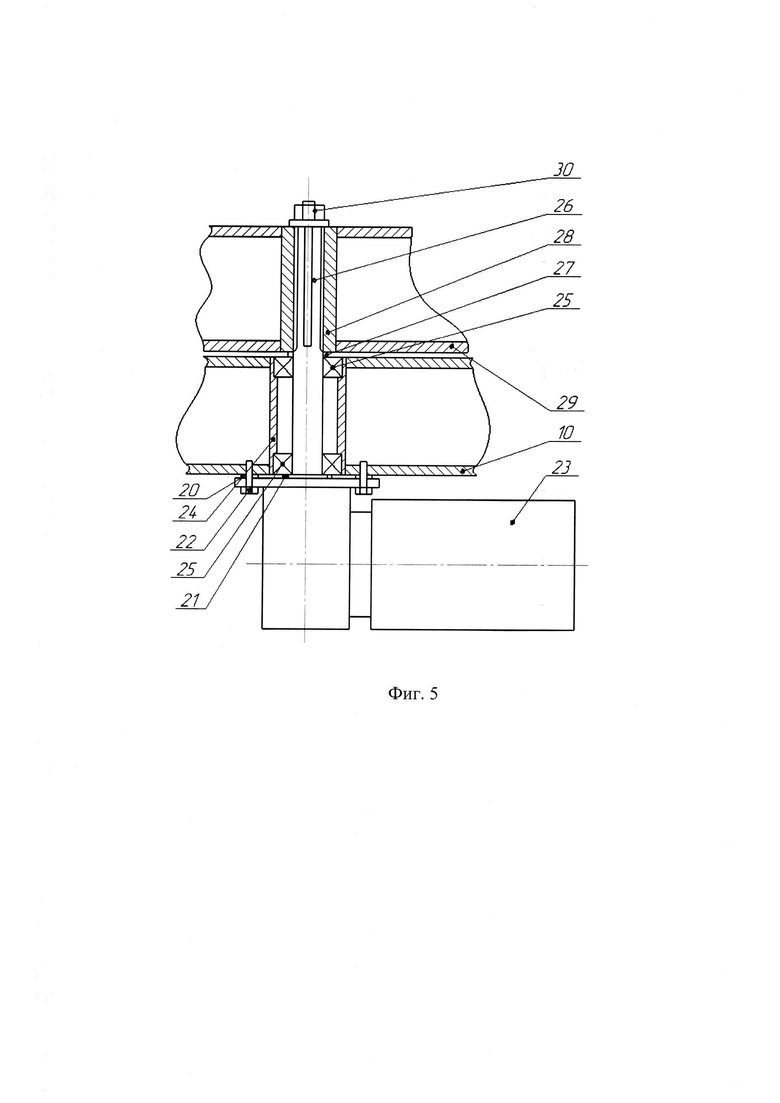
На фиг. 5 - то же поворотная балка.
Осуществление изобретения
Устройство для автоматического регулирования положения GPS-антенны включает в себя опорную станину жестко соединенную из продольных балок 1 и 2 с механизмом крепления 3 к транспортному средству (на фиг. не обозначен) в нижней части поперечных передней и задней балок 4 и 5,соответственно, на которых с наружной стороны по краям расположены упоры 6, между которыми установлен шток 7 круглого сечения, закрепленный с двух сторон гайками 8 и передвижную рамку (на фиг. не обозначена), выполненную из нижней и верхней перемычек 9 10, соответственно и стоек 11, с внутренней стороны закрепленными направляющими 12 в которых предусмотрены сквозные отверстия (на фиг. не обозначено) круглого сечения для перемещения по штоку 13. На верхней части нижней перемычки 9 закреплена пластина 14 с прикрепленным на ее внутренней части электрическим мотор-редуктором 15, да валу (на фиг. не обозначен) которого закреплено зубчатое колесо 16 находящееся в зацеплении с зубчатой планкой 17 прикрепленной на верхней задней части поперечной передней балки 4. На верхних крайних частях поперечных передней и задней балок 4 и 5 соответственно прикреплены стойки 18, а на упорах 6 прикреплены концевые выключатели 19.
На нижней стороне верхней перемычки 10 в средней части через распорные втулки 20 и 21, при помощи болтов 22 присоединен второй электрический мотор-редуктор 23. В верхней перемычке 10 закреплена втулка 24 с подшипниками 25 сквозь которые проходит вал 26 шлицевое окончание которого через распорную втулку 27, втулка 28 с аналогичным шлицевым соединением закрепленная в поворотной балке 29 и прижатая гайкой 30.
На поворотной балке 29 закреплен электрический линейный механизм 31, с выдвижным штоком 32, приводящийся в движение при помощи третьего электрического мотор - редуктора 33, вращающего винта 34 и гайки 35. На конце выдвижного штока 32 расположена платформа 36, на которой размещены GPS-антенна 37 и Laser-пилот 38. GPS-антенна 37, Laser-пилот 38, электрические мотор-редукторы 15 и 23 электрическими проводами 39 соединены с контрольно-управляющим устройством 40, располагающимся в кабине транспортного средства.
Устройство для автоматического регулирования положения GPS-антенны работает следующим образом.
Перед началом выполнения работы, с помощью механизма крепления 3 продольных балок 1 и 2, скрепленные поперечными передней и задней балками 4 и 5 соответственно опорная станина закрепляется на открытой поверхности транспортного средства. В зависимости от расположения границы оцифровываемого участка местности передвижная рамка из нижней, верхней перемычек 9 и 10 соответственно и стоек 11 перемещается вправо или влево в результате поступающего сигнала по электрическим проводам 39 из контрольно-управляющего устройства 40, расположенного в кабине транспортного средства. В результате вращения вала электрического мотор-редуктора 15, расположенное на планке 14, зубчатое колесо 16 поворачивается и перемещает зубчатую планку 17 в одну или другую сторону, а по достижении крайнего перемещения стойки 11 прижимают концевые выключатели 19, тем самым размыкают цепь и вращение вала электрического мотор-редуктора 15 прекращается. Для исключения перекосов и равномерности перемещения передвижной рамки, стойки 11 по направляющим 12 передвигаются вдоль штока 7, закрепленного в упорах 6 гайками 8. Достигнув крайнего положения на электрический мотор-редуктор 23 также поступает сигнал по электрическим проводам 39 из контрольно-управляющего устройства 40, расположенного в кабане транспортного средства и вал 26 второго электрического мотор - редуктора 23, жестко прикрепленного через распорные втулки 20 и 21 болтами 22, поворачивается в подшипниках 25, расположенных в жестко закрепленных втулке 24 и верхней перемычке 10 начинает вращаться и тем самым поворачивает поворотную балку 29, закрепленную при помощи шлицевых соединений на валу 26 и втулке 28, через распорную втулку 27 прижатую гайкой 30. Достигнув угла 90 градусов вращение вала 26 второго электрического мотор - редуктора 23 прекращается и поворотная балка 29, для исключения провисания, опирается на стойки 18 и занимает перпендикулярное положение по отношению к движению транспортного средства. Для дальнейшего увеличения вылета GPS-антенны 37 и Laser-пилота 38, закрепленных на платформе 36 выдвижного штока 32, на третий электрический мотор - редуктор 33 электрического линейного механизма 31 также поступает сигнал по электрическим проводам 39 из контрольно-управляющего устройства 40, расположенного в кабине транспортного средства и при помощи вращающегося винта 34 и гайки 35 выдвижной шток 32 выдвигается и занимает необходимое положение. В зависимости от наличия препятствий Laser лазер-пилот 38 получает отраженный сигнал, направляет его по электрическим проводам 39 в контрольно-управляющее устройство 40, там оно обрабатывается и посылается сигнал на электрические мотор-редукторы 15, 23 и 33, которые вращаясь размещают GPS-антенну 37 над границей оцифровываемого участка избегая поломку от взаимодействия с препятствием.
После окончания работы поступают сигналы на электрические мотор-редукторы 15, 23 и 33 и устройство переводится в транспортное положение.
По сравнению с прототипом и другими техническими решениями изобретение имеет преимущества:
- возможность располагать транспортное средство при движении на удаленном расстоянии от границы оцифровываемого участка, в результате чего устраняется опасность столкновения с возможными препятствиями;
- возможность изменения ориентации GPS-антенны относительно транспортного средства в ту или иную сторону непосредственно при движении транспортного средства;
- возможность изменения расстояния от GPS-антенны до транспортного средства непосредственно при движении транспортного средства;
- регулировка положения GPS-антенны в автоматическом режиме.
Таким образом, заявленное устройства для автоматического регулирования положения GPS-антенны обеспечивает повышение точности оцифровки местности, повышение скорости и удобства, как при непосредственном проведении работ, так и при подготовке оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПЕРЕМЕЩЕНИЯ НАВИГАЦИОННОЙ АНТЕННЫ ДЛЯ ОЦИФРОВКИ МЕСТНОСТИ | 2023 |
|
RU2809941C1 |
| УСТРОЙСТВО РЕГУЛИРОВКИ МЕСТОПОЛОЖЕНИЯ НАВИГАЦИОННОЙ АНТЕННЫ | 2023 |
|
RU2810673C1 |
| Установка к транспортному средству для оцифровки сельскохозяйственных угодий | 2024 |
|
RU2841484C1 |
| Установка к транспортному средству для электронного картирования полей сельскохозяйственного назначения в геоинформационных агротехнологиях | 2024 |
|
RU2841050C1 |
| СПАСАТЕЛЬНАЯ МАШИНА ДЛЯ ЭВАКУАЦИИ ЛЮДЕЙ С ВЫСОТНЫХ ЗДАНИЙ | 2012 |
|
RU2506101C1 |
| РОБОТИЗИРОВАННЫЙ ВЕЗДЕХОДНЫЙ КОМПЛЕКС ДЛЯ ХРАНЕНИЯ И ОТПУСКА ПРОДУКЦИИ | 2022 |
|
RU2787095C1 |
| УНИВЕРСАЛЬНЫЙ АВТОЖИР | 2013 |
|
RU2543471C2 |
| МАЧТОВОЕ УСТРОЙСТВО | 2012 |
|
RU2496193C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2001 |
|
RU2230699C2 |
Изобретение относится к области радиотехники, в частности к устройству для автоматического регулирования положения GPS-антенны, и может быть использовано при оцифровке местности транспортным средством. Технический результат, который может быть достигнут с помощью предлагаемого изобретения, сводится к возможности корректировки положения антенны, повышению точности и скорости оцифровки местности. Изобретение содержит опорную станину, жестко соединенную с помощью двух продольных балок с механизмом крепления к транспортному средству и с жестко закрепленными верхней и нижней перемычками, причем на верхней части последней закреплена пластина с установленным электрическим мотор-редуктором, поворотную балку, электрический линейный механизм с выдвижным штоком и платформой для установки GPS-антенны и Laser–пилота (сонара). 2 з.п. флы, 5 ил.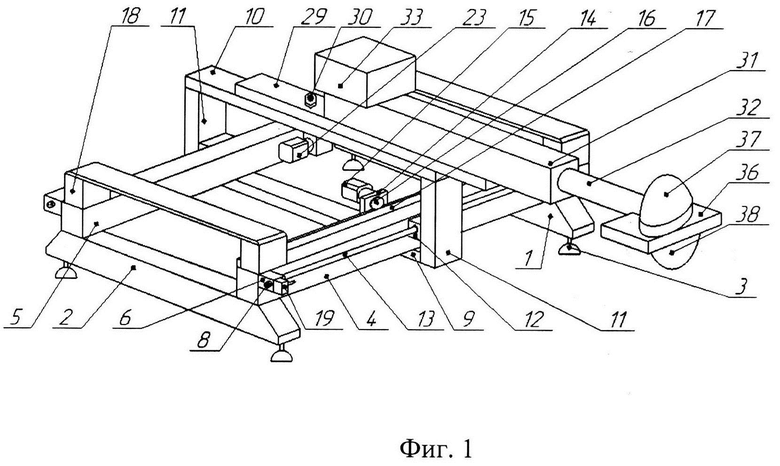
1. Устройство для автоматического регулирования положения GPS-антенны, содержащее опорную станину, жестко соединенную с помощью двух продольных балок с механизмом крепления к транспортному средству и с жестко закрепленными верхней и нижней перемычками, причем на верхней части последней закреплена пластина с установленным электрическим мотор-редуктором, поворотную балку, электрический линейный механизм с выдвижным штоком и платформой для установки GPS-антенны и Laser-пилота, при этом GPS-антенна и Laser-пилот, электрический мотор-редуктор, электрический линейный механизм с выдвижным штоком соединены с контрольно-управляющим устройством, расположенным в транспортном средстве, отличающееся тем, что оно дополнительно снабжено передвижной рамкой, выполненной из верхней и нижней перемычек, установленной на опорной станине, вторым и третьим мотор-редукторами, при этом на нижней стороне верхней перемычки в средней части через распорные втулки установлен второй электрический мотор-редуктор, а электрический третий мотор-редуктор установлен на выдвижном штоке электрического линейного механизма, закрепленного на поворотной балке, а передвижная рамка установлена с возможностью перемещения при помощи вращения зубчатого колеса электрического мотор-редуктора, расположенного на нижней перемычке, находящегося в зацеплении с зубчатой планкой, закрепленной на задней верхней части поперечной балки опорной станины.
2. Устройство для автоматического регулирования положения GPS-антенны по п. 1, отличающееся тем, что передвижная рамка установлена с возможностью перемещения по штоку круглого сечения, установленному в упорах на наружной стороне поперечных балок опорной станины и направляющих на стойках передвижной рамки.
3. Устройство для автоматического регулирования положения GPS-антенны по п. 1, отличающееся тем, что на упорах на крайних наружных частях поперечной балки установлены концевые выключатели с возможностью ограничения перемещения передвижной рамки и отключения вращения электрического мотор-редуктора передвижной рамки.
| Приспособление для заточки лезвий лап культиваторов, лемехов плугов и т.п. непосредственно на почвообрабатывающей машине | 1960 |
|
SU131240A1 |
| Отделитель сусла из виноградной мезги | 1952 |
|
SU96292A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 2008 |
|
RU2359372C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО АНТЕННЫ С ОГРАНИЧЕННЫМ СЕКТОРОМ НАВЕДЕНИЯ | 2003 |
|
RU2242826C1 |
| CN 102013573 B, 01.05.2013. | |||

