Изобретение относится к способу автоматического создания заданного призабойного пространства при работах очистного забоя, имеющего забойный конвейер, по меньшей мере одну очистную машину, а также гидравлическую щитовую механизированную крепь, в подземной разработке каменного угля.
Одна из проблем при автоматическом управлении работами в очистном забое, как в направлении выемки, так и в направлении подвигания забоя очистной машины, состоит, в частности, в том, чтобы, с одной стороны, создать призабойное пространство достаточного размера для обеспечения прохода забойного оборудования, например, без столкновений между очистной машиной и секциями щитовой механизированной крепи при прохождении очистной машины мимо них, а с другой стороны, обеспечить как можно меньший обвал горной породы при очистных работах, таким образом по возможности ограничить выполнение очистных работ горизонтом пласта без выемки слишком большого объема боковой породы. Имеющиеся главным образом перед очистными работами данные о месторождении, относящиеся к мощности пласта, почве и кровле пласта и наличии седловин и/или впадин, как в направлении выемки, так и в продольном направлении забойного оборудования, то есть в направлении подвигания забоя очистной машины, являются слишком неточными для их использования в качестве опорных для автоматизированного управления работой по очистке и установке крепи.
Поэтому в основе изобретения лежит задача разработки способа вышеуказанного типа, с помощью которого на основании данных, полученных от забойного оборудования, возможна автоматизация работы по очистке и установке крепи применительно к созданию заданного призабойного пространства.
Решение этой задачи, включая предпочтительные варианты осуществления и усовершенствования изобретения, следует из содержимого формулы изобретения, которая изложена после этого описания.
Основная идея изобретения предусматривает способ, предназначенный, прежде всего, для очистки врезанием с помощью очистного комбайна с барабанным исполнительным органом в качестве очистной машины, при котором посредством датчиков уклона, размещенных по меньшей мере на трех из четырех основных узлов каждой секции щитовой механизированной крепи, то есть опорном полозе, завальном щите, несущих шарнирных консолях и завальной области поддерживающего перекрытия, определяют уклон узлов крепи по отношению к горизонтали на основе измененных данных в вычислительном блоке путем сравнения с сохраненными в нем базовыми данными, определяющими геометрическую ориентацию узлов и их перемещение во время шагового перемещения, рассчитывают соответствующую перпендикулярную по отношению к падению пласта высоту секции щитовой механизированной крепи, при котором, кроме того, посредством установленных на очистной машине датчиков регистрируют высоту врезания очистной машины в качестве призабойного пространства, при этом соответствующие наборы данных сохраняют для каждого участка очистных работ, пройденного соответствующей секцией щитовой механизированной крепи, и синхронизируют в смысле синхронного анализа по местоположению на участке очистных работ высоту врезания очистной машины с высотой крепи секции щитовой механизированной крепи, когда перемещающаяся с временной задержкой секция щитовой механизированной крепи достигает того места, к которому относится высота врезания очистной машины, положенная в основу сравнения с высотой крепи.
С изобретением связано то преимущество, что, в первую очередь, на основании определяемой со сравнительно небольшими затратами высоты крепи получают параметр для системы управления забоем с достаточной точностью и надежностью. Другой получаемый согласно изобретению параметр состоит в регистрации направления врезания очистной машины благодаря определению ее абсолютной высоты врезания. Так как поддерживающее перекрытие соответствующей секции щитовой механизированной крепи достигает очищенную очистной машиной область при ее перемещении мимо секции щитовой механизированной крепи с задержкой по времени, то есть с так называемым запаздыванием крепи на один или два шага крепи, изобретение предусматривает, что соответствующие наборы данных сохраняют для каждого участка очистных работ, по которому прошла соответствующая секция щитовой механизированной крепи, и синхронизируются в смысле синхронного анализа по местоположению. Благодаря такой мере возможно получение сведений о том, соответствует ли освобожденная очистной машиной высота врезания также и последующей высоте крепи в этом месте или же возможная появляющаяся ложная кровля или происходящее сближение ведут к отклонениям высоты крепи вверх или вниз от высоты врезания, которые следует учитывать при следующем перемещении очистной машины посредством изменения или согласования ее высоты врезания. То же самое такое относится к прохождению впадин и/или седловин, так как в соответствующем изобретению способе используют, главным образом, полученную высоту крепи, чтобы с учетом высоты врезания очистной машины обеспечить цепь автоматического регулирования для управления работой по очистке и установке крепи, которая при применении этой цепи ведет к автоматическому соблюдению заданного призабойного пространства. При этом с учетом цели в качестве индикатора высоты забоя можно применять определяемую на переднем крае поддерживающего перекрытия перпендикулярную по отношению к падению пласта высоту крепи между верхним краем перекрытия и нижним краем опорного полоза. В качестве управляющей величины для управления высотой соответствующей секции щитовой механизированной крепи также подходит высота крепи в области верхней части щитовой крепи, так как в ином случае относительный угол между поддерживающим перекрытием и опорным полозом в отдельных фазах согласования высоты ведет к сильным изменениям высоты относительно края перекрытия. Поэтому может быть целесообразным определить высоту крепи между поддерживающим перекрытием и опорным полозом в любых местах и использовать для соответствующего способа наиболее целесообразное место для управления высотой.
Согласно одному примеру осуществления изобретения можно предусмотреть, что сохраненные наборы данных для высоты врезания и высоты крепи синхронизируют друг с другом в одинаковый момент времени в смысле синхронного по времени анализа для выбранного участка очистных работ. Даже если в момент синхронизации соответствующая секция щитовой механизированной крепи еще не достигла очищенной области, синхронный по времени анализ имеющихся наборов данных может использоваться для выполнения прогнозов относительно развития призабойного пространства и изменений уклона на секциях щитовой механизированной крепи во время последующего продвижения очистки, так что на основании соответствующим образом вычисленных тенденций в отношении призабойного пространства можно заблаговременно согласовать работу по очистке и установке крепи с точки зрения соблюдения предварительно заданного призабойного пространства.
Кроме того, в одном примере осуществления изобретение предусматривает, что действительные для отдельного очистного забоя на основании данных о месторождении, а также для используемого забойного оборудования машинные данные предварительно задают соответствующую требуемую призабойному пространству заданную высоту для высоты секций щитовой механизированной крепи и при отклонениях вычисленной фактической высоты крепи от заданной высоты крепи происходит автоматическое управление высотой врезания очистной машины для достижения заданной высоты крепи. Действительную для призабойного пространства заданную высоту крепи получают, с одной стороны, на основании структуры очищаемого пласта, при этом очистка должна регулярно регистрировать материал, имеющийся между жесткой кровлей и жесткой почвой пласта. Тем самым это при необходимости включает очистку находящейся между углем и жесткой кровлей влажной пачки ископаемого, а также находящегося между углем и жесткой почвой пласта разнородного слоя ископаемого. С другой стороны, особое внимание необходимо уделять данным секций щитовой механизированной крепи, прежде всего их рабочей области между опорой на жесткую почву пласта и подпиранием жесткой кровли, так что высота врезания не должна быть больше, чем рабочая область секций щитовой механизированной кровли. При этом заданную высоту врезания рассчитывают таким образом, чтобы был возможен проход очистной машины с предварительно заданной высотой врезания в пределах рабочий высоты секций щитовой механизированной кровли без столкновения. Так как во время работы жесткая кровля не должна захватываться очистной машиной, при определении высоты врезания при необходимости следует предусмотреть запланированную выемку почвы пласта, чтобы обеспечить требуемое призабойное пространство даже при малой мощности пласта.
На основании предусмотренного согласно изобретению постоянного контроля фактической высоты крепи можно от врезания к врезанию очистной машины проверять, соблюдается ли создаваемое очистной машиной призабойное пространство согласно заданной высоте щита или же появляются ли отклонения вверх или вниз. В соответствии с этими отклонениями можно осуществлять автоматическое управление очистной машиной, а именно либо посредством изменения верхнего врезания на опережающем барабане, который, однако, не должен захватывать жесткую кровлю, либо посредством изменения нижнего врезания на запаздывающем барабане. При этом выбор величины нижнего врезания или, при необходимости, величины верхнего врезания при необходимости регулируют при различных отклонениях фактической высоты крепи от заданной высоты крепи.
Благодаря этому внезапные изменения в уклоне поддерживающих перекрытий отдельных секций щитовой механизированной крепи на ограниченных участках очистного забоя в направлении более высокого призабойного пространства позволяют сделать вывод о наличии локально ограниченных обвалов, и их можно тем самым отличить от, возможно, неверно настроенной высоты врезания очистной машины.
Сравнение заданной высоты щита с фактической высотой щита может перекрываться из-за появления сближения, которое уменьшает очищенное призабойное пространство вопреки поддерживающему эффекту используемой щитовой механизированной крепи. Например, согласно одному примеру осуществления изобретения предусмотрено, что если значение высоты врезания становится меньше высоты щита, на основании этого определяют появление сближения и, например, компенсируют это сближение посредством увеличения нижнего врезания. Благодаря этому возможно целенаправленно компенсировать влияние сближения на высоту забоя. В одном особом примере осуществления изобретения предусмотрено, что в случае запланированных остановок работы призабойное пространство увеличивают на размер сближения, ожидаемого в течение остановки работы.
Так как образование призабойного пространства посредством подвигания очистного забоя также зависит от того, в каком положении относительного уклона находится очистная машина с ее барабанами относительно секций щитовой механизированной крепи, согласно одному примеру осуществления изобретения предусмотрено, что на забойном конвейере и/или на очистной машине соответственно установлен датчик уклона, и определяют угол уклона забойного конвейера и очистной машины в направлении очистки. При этом достаточно размещения одного датчика уклона на очистной машине. Хотя перемещающаяся на забойном конвейере и направляемая за ним очистная машина некоторым образом образует единое целое с забойным конвейером, для улучшения точности управления может быть целесообразным также обеспечить регистрацию уклона забойного конвейера посредством размещенного на нем датчика уклона. При необходимости для целей управления достаточно размещения датчика уклона только на забойном конвейере.
Регистрация поведения уклона очистной машины относительно положения секции очистной механизированной крепи дает возможность при относительных угловых положениях секций щитовой механизированной крепи и очистной машины относительно друг друга, с одной стороны, определять угол рассогласования опорного полоза секции щитовой механизированной крепи и очистной машины или забойного конвейера, а с другой стороны, угол рассогласования между поддерживающим перекрытием секции щитовой механизированной крепи и очистной машиной или забойным конвейером и учитывать соответствующий угол рассогласования в расчете создаваемого очистной машиной при очистных работах призабойного пространства. Например, может быть целесообразным регистрировать угол опорного полоза, измеренный в направлении очистки, имеющимся на опорном полозе секции щитовой механизированной крепи датчиком уклона, относительно горизонтали и использовать в качестве управляющей величины, так как полоз, как правило, перемещается не по естественной почве пласта, а вдоль очищенного ступенчатого контура следов врезания барабаном. Поэтому при установке секции щитовой механизированной крепи из-за высокого удельного давления опорного полоза с пиком давления, проявляющимся рядом с концом опорного полоза, зачастую происходит погружение в искусственно созданную почву пласта. При этом погружение опорного полоза происходит не параллельно положению, а из-за распределения давления на опорном полозе в большей степени у конца опорного полоза, так что опорный полоз выполняет некоторое вращательное движение. Для противодействия может использоваться так называемый «опорный подъемник», посредством которого опорный полоз отдельной секции щитовой механизированной крепи можно поднять по сравнению с поддерживающим перекрытием в рамках шагового перемещения. При использовании опорного подъемника опорные полозья соответствующей секции щитовой механизированной крепи поднимают перед шаговым перемещением, чтобы опорные полозья могли переместиться скользящим движением на почву пласта или на лежащий на ней навал отбитого ископаемого. Тем самым предотвращается более сильное погружение опорных полозьев. Также опорный подъемник подходит для полезного выравнивания секции щитовой механизированной крепи при перемещении вперед. В тех случаях, когда опорный полоз перемещается по почве пласта без больших проблем, достаточно управления секцией щитовой механизированной крепи с учетом зарегистрированного уклона опорного полоза; в этом отношении определение угла опорного полоза не требуется. Напротив, в случае поддерживающего перекрытия такой случай возникает редко, пока на кровле не появляется обрушение ложной кровли, так как поддерживающее перекрытие, как правило, перемещается вдоль естественного горизонта кровли. Тем самым, как правило, погружение поддерживающего перекрытия в кровлю не происходит. Однако в случае появления сближения возникает потеря высоты с наступающим тем самым угловым движением поддерживающего перекрытия, так что, как уже указано, относительные положения между очистной машиной и поддерживающим перекрытием позволяют сделать выводы об ожидаемом призабойном пространстве.
Кроме того, регистрируемый посредством контроля уклона на очистной машине подъем в гору очистной машины в направлении очистки ведет к уменьшению призабойного пространства с опасностью столкновений очистной машины с секциями щитовой механизированной кровли, в то время как перемещение очистной машины под гору ведет к увеличению призабойного пространства, которое при известных условиях превышает максимальную рабочую область секций щитовой механизированной крепи. Это необходимо учитывать путем согласования высоты врезания на очистной машине.
Такое перемещение очистной машины в гору или под гору неизбежно происходит при перемещении через впадины и/или седловины в направлении очистки. Так, например, вход в седловину распознают посредством зарегистрированного изменения уклона прилегающего к кровле поддерживающего перекрытия секции щитовой механизированной крепи. На основании величины изменения уклона между двумя шаговыми перемещениями щитовой механизированной крепи вперед можно вычислить изменение высоты в смысле уменьшения высоты для каждого последующего шагового перемещения соответствующей секции щитовой механизированной крепи. Для удержания призабойного пространства на настроенном заданном уровне и предотвращения уменьшения призабойного пространства очистная машина должна выполнить управляющее движение для уменьшения нижнего врезания. Далее перед превышением верхней точки седловины может быть обнаружено изменение уклона поддерживающего перекрытия относительно горизонтали. Эти данные используют для заблаговременного управления врезанием посредством управления возвращением пройденного участка уменьшенной высоты к исходному положению, чтобы заданная высота призабойного пространства также соблюдалась при прохождении седловины. Соответственно процесс управления, однако в обратном направлении, настраивается при прохождении впадины, при котором с принципиальной точки зрения доминирует идентичный ход изменения направления.
Расположенные на секциях щитовой механизированной крепи датчики уклона также указывают величину уклона секций щитовой механизированной крепи поперек к направлению очистки, так как и в направлении подвигания забоя очистной машины в забое могут иметься седловины и впадины. Так линию кровли и почвы пласта в продольном направлении забоя можно вывести из поперечного наклона секций щитовой механизированной крепи, существует возможность таким образом управлять опережающим барабаном и запаздывающим барабаном очистной машины в ходе постоянного шагового перемещения для того, чтобы исключить появление нежелательного участка кровли или, возможно, выходящего за пределы настроенной величины выемки почвы пласта, благодаря чему предотвращают излишний захват пустой породы или оставление угля под кровлей, или появление узких мест между очистной машиной и щитовой механизированной крепью.
Согласно одному примеру осуществления изобретения предусмотрено, что в качестве датчиков уклона используются датчики ускорения, которые на основании отклонения от ускорения силы тяжести регистрируют угловое положение датчика ускорения в пространстве. Тем самым физически определяется угол относительно вертикали, который пересчитывают в угол уклона для уклона узлов крепи относительно горизонтали.
При этом с целью исключения погрешностей, вызванных колебаниями используемых узлов, может быть предусмотрено, что определенные датчиками ускорения значения измерения проверяют и исправляют посредством соответствующего метода затухания.
На чертежах представлены примеры осуществления изобретения
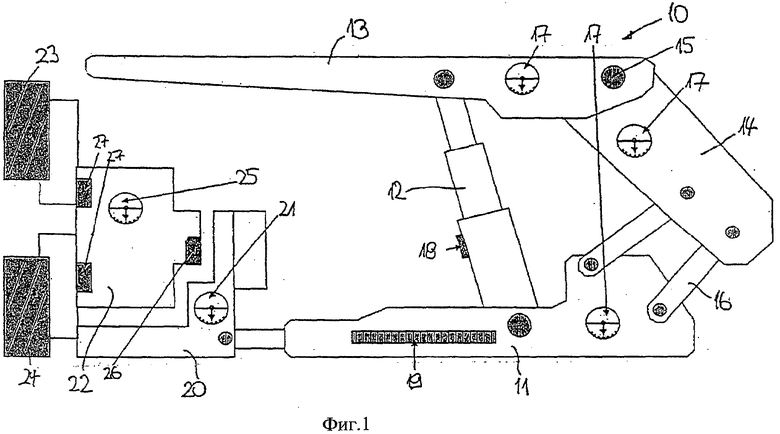
Фиг.1 представляет секцию щитовой механизированной крепи с размещенными на ней датчиками уклона в комбинации с забойным конвейером и применяемым в качестве очистной машины очистным комбайном с барабанным исполнительным органом в схематическом виде сбоку,
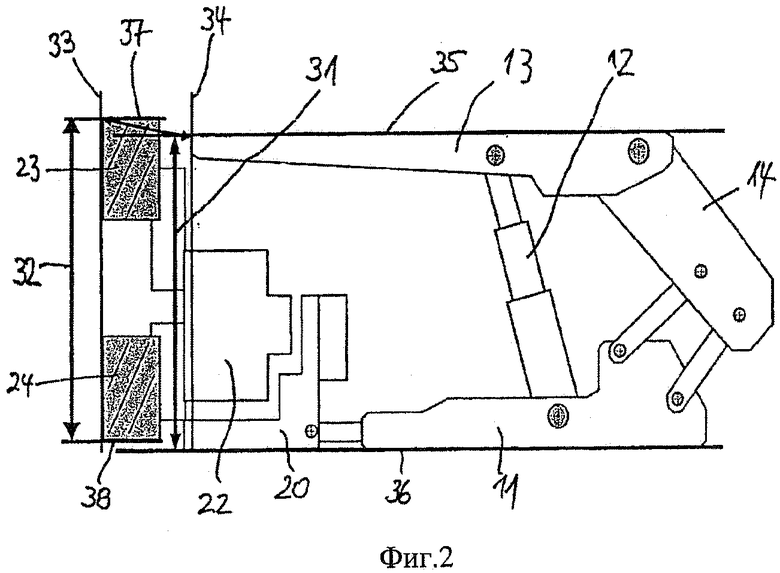
Фиг.2 - забойное оборудование согласно фиг.1 с использованием синхронного анализа по местоположению,
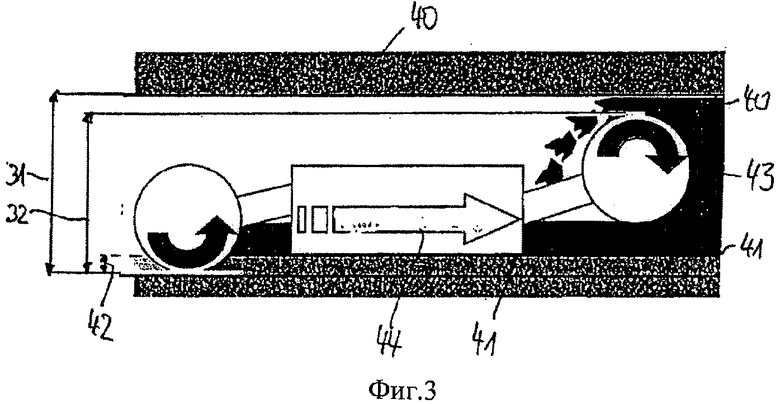
Фиг.3 - забойное оборудование согласно фиг.1 при очистной работе в схематическом представлении,
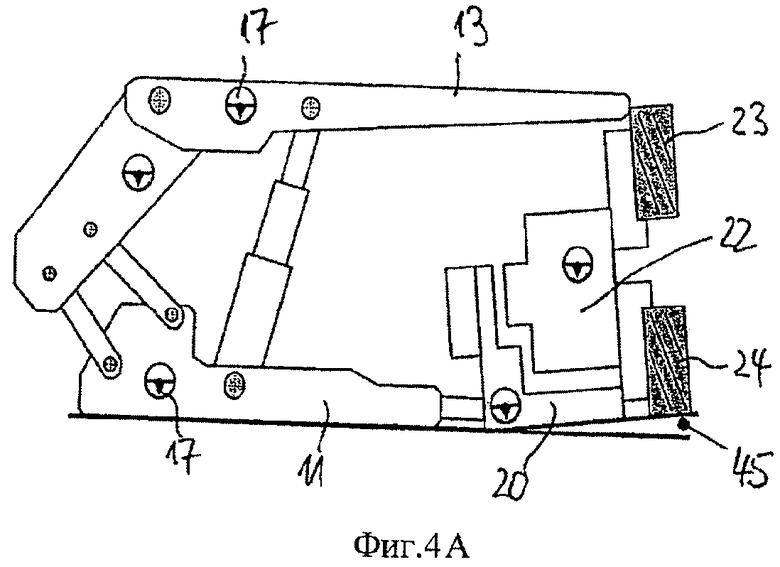
Фиг.4а - забойное оборудование согласно фиг.1 при уклоне очистной машины в гору,
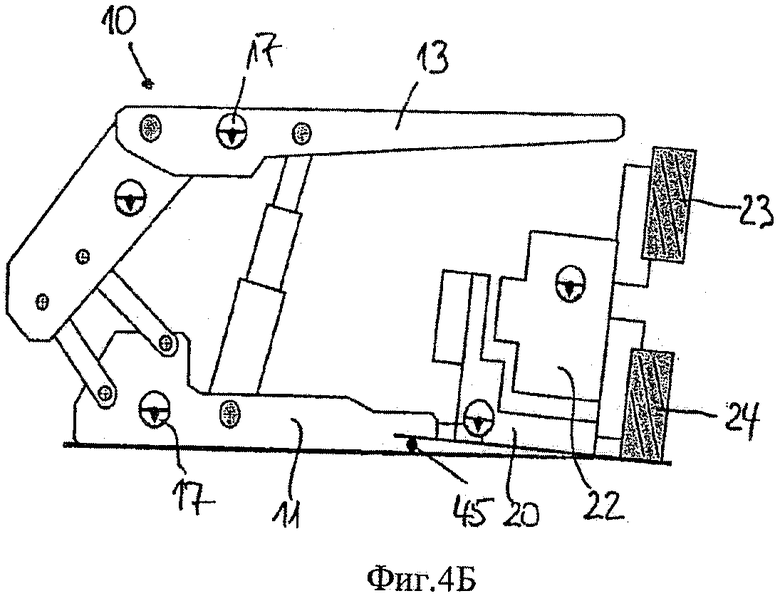
Фиг.4б - забойное оборудование согласно фиг.1 при уклоне очистной машины под гору,
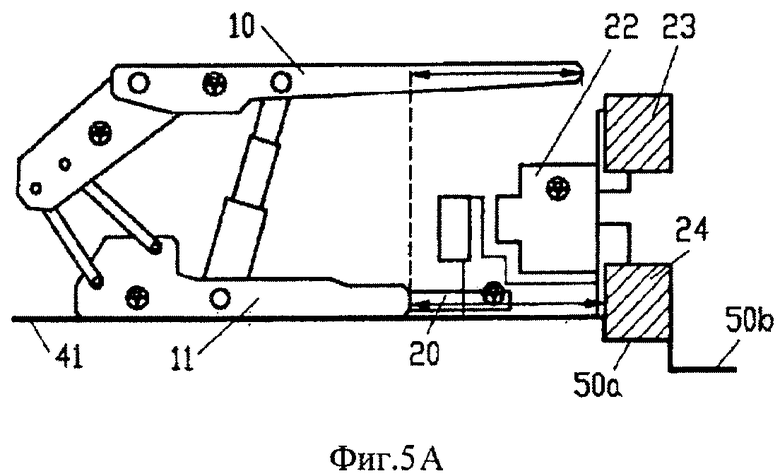
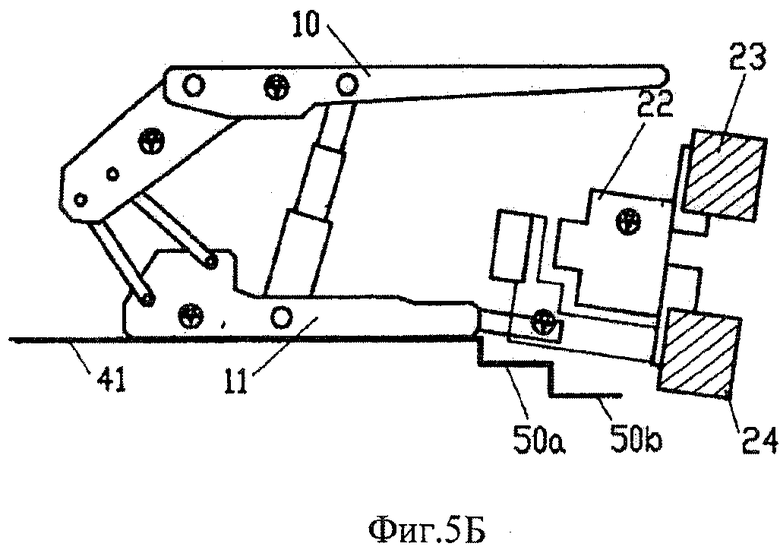
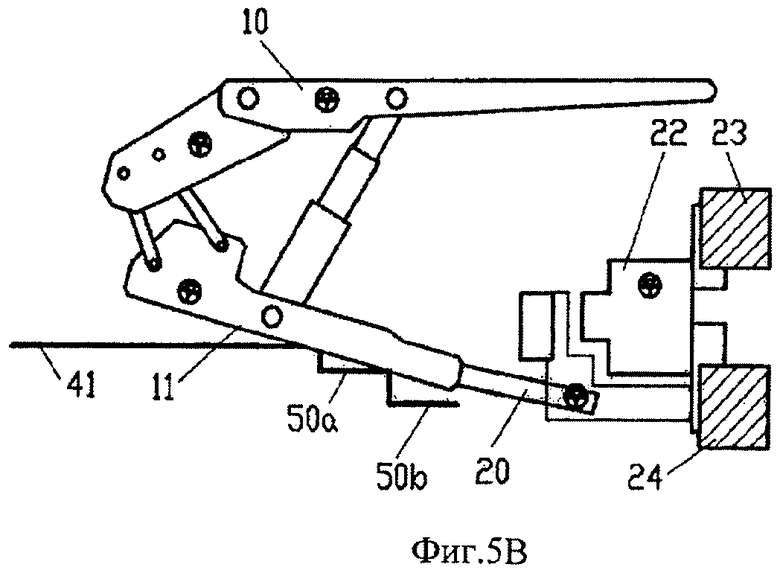
Фиг.5а-в - в схематическом представлении смещенное по времени перемещение секции щитовой механизированной кровли вслед за подвиганием очистной машины,
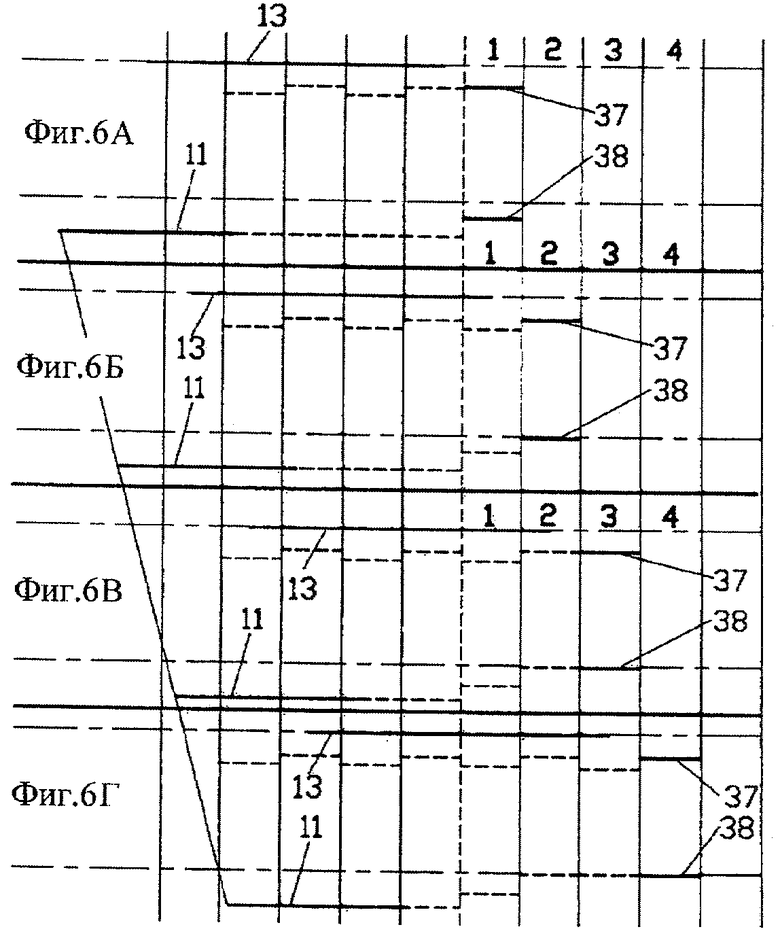
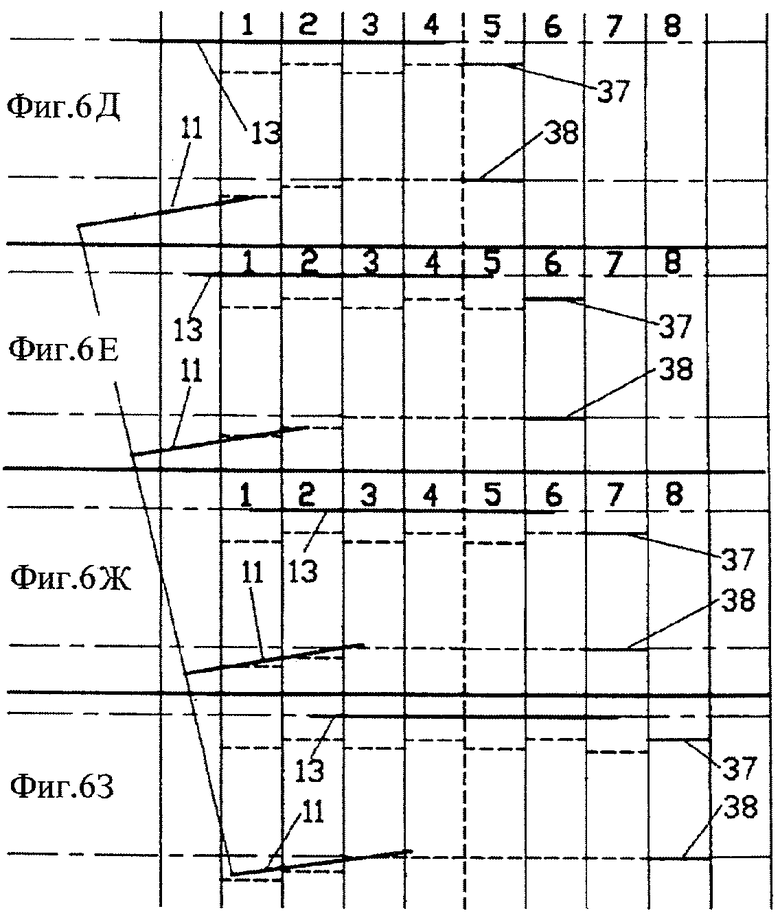
Фиг.6а-6з - в схематическом представлении регулирование для достижения предварительно заданного призабойного пространства исходя из начальной слишком большой высоты крепи.
На основании приводимых ниже пояснений к фигурам объясняются основные положения способа согласно изобретению.
Представленное на фигуре 1 забойное оборудование включает в себя, в первую очередь, секцию 10 щитовой механизированной крепи с опорным полозом 11, на котором параллельно размещены две стойки 12, из которых в фигуре 1 видна только одна стойка, и у которых на их верхнем конце расположено поддерживающее перекрытие 13. В то время как поддерживающее перекрытие 13 своим передним (левым) концом направлено к описанной далее очистной машине, на заднем (правом) конце поддерживающего перекрытия 13 посредством шарнира 15 шарнирно расположен завальный щит 14, при этом завальный щит поддерживается в виде сбоку двумя расположенными на опорном полозе 11 несущими шарнирными консолями 16. В изображенном примере осуществления на секции 10 щитовой механизированной крепи установлены три датчика 17 уклона, а именно: датчик 17 уклона на опорном полозе 11, датчик 17 уклона в задней части поддерживающего перекрытия 13 рядом с шарниром 15 и датчик 17 уклона на завальном щите 14. Как не представлено более подробно, на четвертом подвижном узле секции 10 щитовой механизированной крепи, несущих шарнирных консолях 16, также может быть предусмотрен датчик уклона, при этом из четырех возможных датчиков 17 уклона следует установить три датчика уклона для того, чтобы с помощью полученных ими значений уклона определять положение секции щитовой механизированной крепи в очистном пространстве. Таким образом, изобретение не ограничено точно изображенным на фигуре 1 расположением датчиков уклона, а включает в себя все возможные комбинации трех датчиков уклона на четырех подвижных узлах секции щитовой механизированной крепи.
Представленная на фигуре 1 секция 10 щитовой механизированной крепи прикреплена к забойному транспортеру 20, который также имеет датчик 21 уклона, благодаря чему с точки зрения управления забойным оборудованием также и здесь, в принципе, возможно получение данных о положении конвейера. На конвейере 20 расположена очистная машина в виде очистного комбайна 22 с барабанным исполнительным органом, имеющая верхний (режущий) барабан 23 и нижний (режущий) барабан 24, при этом в области очистного комбайна 22 с барабанным исполнительным органом расположен датчик 25 уклона, кроме того, датчик 26 для регистрации соответствующего местоположения очистного комбайна 22 с барабанным исполнительным органом в забое, а также измерительные стержни 27 для измерения высоты врезания очистного комбайна 22 с барабанным исполнительным органом. Механическое оснащение забойного оборудования дополняется установкой датчиков 18 на стойках 12, посредством которых возможно изменение положения поддерживающего перекрытия 13 по высоте за счет установления высоты выдвижения стойки 12. Помимо этого, на опорном полозе 11 установлена система 19 измерения пути, посредством которой определяется соответствующий ход шага секции 10 щитовой механизированной крепи по отношению к забойному конвейеру 20. Как уже указано, при этом нет настоятельной необходимости в размещении датчика 21 уклона на забойном транспортере 20, если на очистном комбайне 22 с барабанным исполнительным органом установлен датчик 25 уклона. В таком случае датчик 21 уклона может быть предусмотрен дополнительно для улучшения точности измерений.
Как видно на фигуре 2, для управления работой по очистке и установке крепи используется высота 31 крепи, а также высота 32 врезания очистной машины 22. При этом высота 31 крепи определяется между верхним краем 35 поддерживающего перекрытия 13 и нижним краем 36 опорного полоза 11 на основании значений, полученных от датчиков 17 уклона. При этом в качестве индикатора для высоты забоя используется высота, вычисленная для конца поддерживающего перекрытия 13. В качестве управляющей величины для управления высотой секции щитовой механизированной крепи особенно подходит высота крепи в области верхней части щитовой крепи, так как в ином случае относительный угол между поддерживающим перекрытием и опорным полозом в фазах согласования высоты ведет к сильным изменениям высоты относительно поддерживающего перекрытия. Поэтому предложено определять высоту щита в любом месте между поддерживающим перекрытием и опорным полозом в области секции щитовой механизированной крепи и использовать для соответствующего способа наиболее целесообразное положение для управления высотой.
Высота 32 щита определяется с помощью измерительных стержней 27 между верхним краем 37 верхнего барабана 23 и нижним краем 38 нижнего барабана 24. Как видно на фигуре 2, определение высоты 32 врезания производится по первой координате 33, в то время как высота 31 щита определяется по находящейся позади координаты 33 координате 34. Причина этого состоит в том, что секция 10 щитовой механизированной крепи перемещается к координате 33 с задержкой по времени только после прохождения очистной машины 22, так что находящийся сначала при определении высоты 32 врезания на координате 34 передний край поддерживающего перекрытия 13 перемещается к координате 33 в более поздний момент времени. Тем самым синхронный анализ полученных данных по местоположению означает, что синхронизация высоты 32 врезания и высоты 31 щита производится только тогда, когда запаздывающая с задержкой по времени секция 10 щитовой механизированной крепи достигнет координаты 33, на которой базируется положенная в основу сравнения с высотой 31 крепи высота 32 врезания очистной машины 22. Синхронный анализ по времени исходит из соответствующих значений для высоты 31 щита и высоты 32 врезания, вычисленных в текущий момент на координате 33 или координате 34 соответственно, в одинаковый момент времени.
При работе забойного оборудования появляется рабочая ситуация, представленная в виде примера на фигуре 3. Горизонт 43 пласта, расположенный между кровлей 40 и почвой 41 пласта, очищается очистной машиной 22, при этом высота 32 врезания перемещающейся в направлении 44 подвигания забоя очистной машины 22 настроена таким образом, чтобы выемка 42 почвы пласта выполнялась нижним барабаном 24. Передний верхний барабан 23 настроен при этом таким образом, чтобы он оставлял под кровлей 40 узкую угольную пачку, которая вследствие врезания сама отделяется от кровли. Таким образом, на фигуре 3 показана настроенная высота 32 врезания. Как видно, в этом случае высота 31 крепи настроена на большую величину, чем высота 32 врезания, так чтобы обеспечить прохождение очистной машины 22 мимо секции 10 щитовой механизированной крепи без столкновений.
На фигуре 4а и 4б представлены состояния, появляющиеся в том случае, когда очистная машина 22 имеет уклон в гору относительно секции 10 щитовой механизированной крепи (фигура 4а), который выражается в образовании угла 45 рассогласования между опорным полозом 11 и нижним барабаном 24 очистной машины 22. Как видно на фиг.4а, в таком случае увеличивается опасность столкновения между очистной машиной 22 и секцией 10 щитовой механизированной крепи, и этот риск может быть уменьшен посредством изменения высоты врезания. То же самое относится к ситуации, представленной на фигуре 4б, в которой очистная машина 22 имеет уклон под гору. Также и здесь появляется соответствующий угол 45 рассогласования, который может быть пределен на основании зарегистрированных датчиками 17 уклона или 25 и 21 положений очистной машины 22 и секции 10 щитовой механизированной крепи, а соответствующий появившийся угол 45 рассогласования следует учитывать при управлении забоем.
На фигурах 5а-5в схематически представлено, что воздействие управляющего движения, настроенного на очистной машине посредством изменения ее высоты врезания или положения врезания, например в виде нижнего врезания, проявляется на секции щитовой механизированной крепи только с задержкой в виде нескольких последующих пошаговых перемещений секции щитовой механизированной крепи.
Так, в первую очередь, на фигуре 5а видно, что очистная машина 22 должна выполнить относительно почвы 41 пласта, на которой стоит секция 10 щитовой механизированной крепи, направленное перемещение вниз через два обозначенных как 50а и 50b горизонта врезания, для чего выполняют два запланированных врезания в почву пласта. Как видно на фигуре 56, секция 10 щитовой механизированной крепи все еще находится на почве 41 пласта, в то время как очистная машина 22 уже достигла новый горизонт 50b врезания в качестве новой почвы пласта. Таким образом, во время двух очистных перемещений очистной машины 22 вначале только очистная машина 22 и забойный конвейер 20 реагируют на предварительно заданные управляющие импульсы. Только в фазе работы, представленной на фигуре 5в, секция 10 щитовой механизированной крепи следует по направлению за движением под гору очистной машины 22, при этом на фигурах 5б и 5в показано, что уже во время опускания очистной машины 22 и забойного конвейера 20 относительно первоначальной почвы пласта 41 высотой врезания очистной машины 22 следует управлять таким образом, чтобы при последующих шаговых перемещениях щитовой механизированной крепи в фазе работы, представленной на фигуре 5в, не возникла избыточная высота крепи. В этом отношении на фигуре 5в видно, что там высота врезания очистной машины 22 уменьшилась по сравнению с фигурами 5а и 5б, чтобы избежать слишком большого призабойного пространства. Пока секция 10 щитовой механизированной крепи находится в представленном на фигуре 5в положении уклона с переходом к новому горизонту 50b почвы пласта, приходится пойти на соответствующее увеличение высоты призабойного пространства.
С принципиальной точки зрения должна обеспечиваться свободная настройка параметров управления. При этом скорость согласования регулировки по высоте следует настраивать посредством максимальной высоты ступени со свободной установкой параметров. При этом важно не выбирать слишком большие отдельные ступени при движениях вверх для того, чтобы забойный конвейер при подвигании не оказался в подвешенном состоянии на одной из ступеней, и забойный конвейер надо поднимать или же имеющаяся система управления должна наклонять забойный конвейер.
Теперь со ссылкой на фигуры 6а-6з необходимо подробнее описать управление процессом при регулировании призабойного пространства исходя из имеющегося вначале слишком высокого призабойного пространства. При этом отдельные полосы врезания очистной машины 22 в направлении очистки обозначены по порядку арабскими цифрами 1…8. Верхняя линия врезания верхнего барабана показана сплошной линией 37, соответственно нижняя линия врезания нижнего барабана показана сплошной линией 38. Поддерживающее перекрытие 13 и опорный полоз 11 соответствующей секции 10 щитовой механизированной кровли также показаны в форме сплошных линий и обозначены соответственными опорными символами.
Как в первую очередь видно на фигуре 6а, предыдущее выполнение врезания представлено в указанных без цифр участках врезания слева от первой полосы 1 врезания, для которого линия 38 врезания нижнего барабана задает уровень для скользящего перемещения опорного полоза 11. Как видно, верхняя линия 37 врезания немного отклоняется от полосы врезания к полосе врезания, однако поддерживающее перекрытие 13 явно находится выше верхней линии 37 врезания, так что высота щита больше, чем высота врезания. Можно предположить, что исходная высота для высоты 31 щита составляет 3,0 м, в то время как должна соблюдаться заданная высота призабойного пространства в размере только 2,30 м. По представленной на фигуре 6а полосе 1 врезания видно, что для достижения цели регулирования настроено и выполнено верхнее врезание для нижнего барабана, так что нижняя линия 38 врезания поднялась относительно исходного состояния. Верхняя линия 37 врезания не изменилась. В представленной на фигуре 6б полосе 2 врезания система инициировала выполнение еще дополнительного верхнего врезания на нижнем барабане (линия 38 врезания). Одновременно видно, что опорный полоз 11 еще не изменил своего положения, так как опорный полоз 13 все еще перемещается по первоначально созданной почве пласта.
В случае основной для фигуры 6в полосы 3 врезания система определила, что теперь полученная высота врезания соответствует заданной высоте для призабойного пространства, так что в полосе 3 врезания выполняется нейтральное врезания с не измененной высотой врезания. Это соответствующим образом также относится к представленным на фигурах 6г-6з полосам 4-8 врезания. Относительно реакции секции 10 щитовой механизированной крепи следует заметить, что опорный полоз 11 достигает вырезанную в полосе 1 врезания ступень только при подвигании полосы 5 врезания и, тем самым, начинает движение в гору, которое продолжается до полосы 8 врезания. В полосе 8 врезания передний край опорного полоза 11 достиг нового уровня почвы пласта и теперь выходит посредством шагового перемещения по последующим полосам врезания на заданную высоту. Вышеописанный процесс может наблюдаться и управляться путем контроля положения уклона очистной машины и ее высоты врезания, а также положения уклона узлов секции 10 щитовой механизированной крепи.
Сравнимый процесс перемещения происходит, если требуется увеличить призабойное пространство, исходя из сначала слишком низкой высоты щита. Также и в этом случае управление начинается с увеличения высоты врезания очистной машины посредством уменьшения врезания у нижнего барабана, так что опорный полоз секции щитовой механизированной крепи при удерживаемом на одинаковом уровне поддерживающем перекрытии выполняет перемещение вниз в предварительно заданной очистной машиной выемке почвы пласта, пока не будет достигнут новый уровень врезания для шаговых перемещений щитовой механизированной крепи.
Раскрытые в вышестоящем описании, формуле изобретения, резюме и чертеже признаки предмета данной документации, как по отдельности, так и в любых комбинациях друг с другом, могут иметь существенное значение для осуществления изобретения в его различных конструктивных формах осуществления.
Изобретение относится к горному делу, в частности к системам для контроля габаритов сечения горной выработки при ее проходке очистным комплексом с механизированной крепью. Способ автоматического создания заданного призабойного пространства осуществляют при работе очистного комплекса, имеющего забойный конвейер, по меньшей мере, одну очистную машину, а также гидравлическую щитовую механизированную крепь. В подземной разработке каменного угля посредством датчиков уклона определяют уклон узлов крепи по отношению к горизонтали. В вычислительном блоке рассчитывают соответствующую перпендикулярную по отношению к падению пласта высоту секции щитовой механизированной крепи. Кроме того, регистрируют высоту врезания очистной машины в качестве призабойного пространства и синхронизируют высоту врезания очистной машины с высотой секции щитовой механизированной крепи. Причем датчики уклона размещают, по меньшей мере, на трех из четырех основных узлов крепи, а именно: опорном полозе, завальном щите, несущих шарнирных консолях и завальной части поддерживающего перекрытия. Предложенный способ обеспечивает автоматизированную корректировку положения рабочего оборудования комплекса для контроля и создания заданного призабойного пространства. 13 з.п. ф-лы, 16 ил.
1. Способ автоматического создания заданного призабойного пространства при работах очистного забоя, имеющего забойный конвейер (20), по меньшей мере, одну очистную машину (22), а также гидравлическую щитовую механизированную крепь, в подземной разработке каменного угля, в котором: посредством датчиков (17) уклона, размещенных, по меньшей мере, на трех из четырех основных узлов каждой секции (10) щитовой механизированной крепи, то есть опорном полозе (11), завальном щите (14), несущих шарнирных консолях (16) и завальной области поддерживающего перекрытия (13), определяют уклон узлов крепи по отношению к горизонтали, и на основе измененных данных в вычислительном блоке путем сравнения с сохраненными в нем базовыми данными, определяющими геометрическую ориентацию узлов и их перемещение во время шагового перемещения, рассчитывают соответствующую перпендикулярную по отношению к падению пласта высоту (31) секции (10) щитовой механизированной крепи, и в котором, кроме того, посредством установленных на очистной машине (22) датчиков (27) регистрируют высоту (32) врезания очистной машины (22) в качестве призабойного пространства, при этом соответствующие наборы данных сохраняют для каждого участка очистных работ, пройденного соответствующей секцией (10) щитовой механизированной крепи, и синхронизируют в смысле синхронного анализа по местоположению на участке очистных работ высоту (32) врезания очистной машины (22) с высотой (31) крепи секции (10) щитовой механизированной крепи, когда перемещающаяся с временной задержкой секция (10) щитовой механизированной крепи достигает того места, к которому относится положенная в основу сравнения с высотой (31) крепи высота (32) врезания очистной машины (22).
2. Способ по п.1, в котором сохраненные наборы данных для высоты врезания (32) и высоты щита (31) синхронизируют между собой в одинаковый момент времени в смысле синхронного по времени анализа для участка очистных работ.
3. Способ по п.1 или 2, в котором для отдельной работы по очистке на основании данных о месторождении, а также машинных данных используемого забойного оборудования предварительно указывают заданную высоту для высоты (31) щита секции (10) щитовой механизированной крепи, а при отклонениях вычисленной фактической высоты крепи от заданной высоты крепи выполняют автоматическое управление высотой (32) врезания очистной машины (22) для достижения заданной высоты крепи.
4. Способ по п.3, в котором высоту (32) врезания очистной машины (22) устанавливают посредством изменения верхнего врезания на одном из барабанов (23, 24).
5. Способ по п.3, в котором высоту (32) врезания очистной машины (22) устанавливают посредством изменения нижнего врезания на одном из барабанов (23, 24).
6. Способ по п.3, в котором при уменьшении значения высоты (32) врезания менее высоты (31) щита вычисляют появляющееся сближение и компенсируют это сближение посредством увеличения нижнего врезания.
7. Способ по п.6, в котором в случае запланированных остановок работы призабойное пространство увеличивают на размер сближения, ожидаемого в течение остановки работы.
8. Способ по п.1, в котором на забойном конвейере и/или на очистной машине соответственно установлен датчик уклона и определяют угол уклона забойного конвейера и очистной машины в направлении очистки.
9. Способ по п.8, в котором рассчитанный на основании измеренного в направлении очистки угла уклона забойного конвейера и очистной машины угол рассогласования между опорным полозом секции щитовой механизированной крепи и конвейером или очистной машиной учитывают в расчете вырезаемого очистной машиной призабойного пространства.
10. Способ по п.8, в котором рассчитанный на основании измеренного в направлении очистки угла уклона забойного конвейера (20) и/или очистной машины (22) угол (45) рассогласования между поддерживающим перекрытием (13) секции (10) щитовой механизированной крепи и конвейером (20) или очистной машиной (22) учитывают в расчете вырезаемого очистной машиной (22) призабойного пространства.
11. Способ по п.1 или 8, в котором посредством определения уклона поддерживающего перекрытия (13) секции (10) щитовой механизированной крепи в направлении очистки определяют направление впадин и/или седловин в направлении очистки и путем обнаруженных изменений уклона поддерживающего перекрытия (13) в течение предварительно заданного периода времени заранее рассчитывают изменение призабойного пространства и соответственно настраивают управление врезанием очистной машины (22).
12. Способ по п.1 или 8, в котором посредством определения уклона отдельных секций (10) щитовой механизированной крепи поперек к направлению очистки определяют направление впадин и/или седловин в направлении подвигания забоя очистной машины (22) и управляют врезанием очистной машины (22) таким образом, что барабаны (23, 24) следуют по обнаруженному направлению впадин и/или седловин.
13. Способ по п.8, в котором в качестве датчиков (17) уклона используют датчики ускорения, которые на основании отклонения от ускорения силы тяжести регистрируют угловое положение датчика ускорения в пространстве.
14. Способ по п.13, в котором для исключения вызванных колебаниями используемых узлов погрешностей определенные датчиками ускорения значения измерения проверяют и исправляют посредством соответствующего метода затухания.
| Способ оценки эффективности лечения хронического катарального гингивита у детей | 2019 |
|
RU2714506C1 |
| 0 |
|
SU184222A1 | |
| Способ управления механизированным комплексом в профильной плоскости пласта в направлении движения | 1978 |
|
SU775334A1 |
| Способ управления очистным комплексом | 1988 |
|
SU1523661A1 |
| Система программного управления очистным комбайном в профиле калийного пласта | 1989 |
|
SU1810534A1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛЕДОБЫВАЮЩИМИ КОМПЛЕКСАМИ И АГРЕГАТАМИ ПО ГИПСОМЕТРИИ И В ПЛОСКОСТИ ПЛАСТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2130119C1 |
| US 4634186 A, 06.01.1987. | |||

