Область техники
Изобретение относится к системе позиционирования, в частности к способу автономного позиционирования для шахтного электровоза с взрывобезопасной аккумуляторной батареей.
Описание уровня техники
Электровозы являются главным видом вспомогательного транспорта в угольных шахтах и выполняют важные задачи транспортировки персонала, оборудования, материалов и т.д. В настоящее время управление электровозом полностью осуществляет машинист, и человеческие факторы, такие как усталость машиниста, могут легко влиять на проблемы с безопасностью, такие как ненамеренное превышение скорости, проезд на красный свет и наезды сзади.
В известном уровне техники шахтные электровозы используют главным образом радиочастотный способ совпадения фингерпринтов, чтобы задействовать позиционирование, который в основном применяется во внешней среде или во внутренних местах с хорошей окружающей средой; в отношении позиционирования в ограниченном пространстве, беспроводное позиционирование основано главным образом на таких технологиях как WiFi, Bluetooth или NFC. Точность позиционирования необходимо повышать, и точность позиционирования электровозов не является достаточно точной, что может легко приводить к несчастным случаям. Тормозная система электровоза также представляет собой одну из главных причин несчастных случаев, во время движения электровоз не может очищать мусор на колее, поэтому мусор накапливается в колее и влияет на нормальное использование колес и деталей тормозной системы; в сложных случаях электровоз может сойти с рельсов.
Раскрытие изобретения
Направленное на проблемы в уровне техники, изобретение предлагает способ автономного позиционирования для шахтного электровоза с взрывобезопасной аккумуляторной батареей.
Изобретение может быть осуществлено с применением следующих технических схем.
Способ автономного позиционирования для шахтного электровоза с взрывобезопасной аккумуляторной батареей включает следующие этапы:
этап S1, построение динамической карты подземной угольной шахты, сканирование окружающей среды лидаром на частоте выше 10 Гц и передача данных на бортовой контроллер, построение динамической карты бортовым контроллером по карте распределения облака точек;
этап S2, шахтный электровоз может быть точно позиционирован посредством применения режима статического точного позиционирования, режима динамического точного позиционирования и режима многоколейного поперечного позиционирования;
этап S3, посредством объединения множественных режимов динамического позиционирования, когда шахтные электровозы работают нормально, в большинстве случаев применяется лидарное позиционирование, и инерциальное позиционирование применяется на участке, где дорожные признаки не очевидны и где лидар не может осуществлять точное распознавание; пассивная калибровка по идентификационной карте с РЧ-меткой применяется в главных точках дорожного пути, и различные технологии динамического позиционирования объединены, чтобы осуществлять автономное позиционирование электровозов;
при этом
электровоз включает тормозной механизм, тормозной механизм включает колеса и тормозной диск, электровоз оснащен некоторым множеством колес на обеих сторонах нижней части, тормозной диск соединен с осью электровоза посредством стационарного вала, и колеса расположены на одном торце тормозного диска, дальнем от оси;
вставная плита расположена в нижней части электровоза на одном его конце, и две нажимные пластины, которые могут перемещаться по горизонтали, расположены на конце электровоза над вставной плитой, один конец нажимной пластины соединен с горизонтальным стержнем, и установочный паз расположен под внутренней частью электровоза, один конец горизонтального стержня заходит в установочный паз и соединен с внутренним концом установочного паза посредством некоторого множества пружин растяжения, внутренние стенки на обеих сторонах установочного паза снабжены направляющей в продольном направлении, обе стороны горизонтального стержня снабжены желобом, совпадающим с направляющей в продольном направлении, и направляющая может перемещаться по желобу, один конец горизонтального стержня, дальний от нажимной пластины, соединен с вертикальным стержнем на обеих сторонах нижней части, нижняя часть одной стороны вертикального стержня, дальней от нажимной пластины, снабжена, для обеспечения возможности поворота, роликом; и первый воздушный мешок расположен между одним концом внутреннего установочного паза рядом с нажимной пластиной и вертикальным стержнем, нижняя часть первого воздушного мешка соединена с некоторым множеством воздуходувных труб; дробящий стержень расположен с возможностью вращения на обеих сторонах нижней части электровоза, верхняя часть дробящего стержня проходит в установочный паз и соединена с зубчатым колесом внутри, и наружная стенка горизонтального стержня соединена с рейкой, которая входит в зацепление с зубчатым колесом;
некоторое множество опорных стержней соединены с наружной стороной неподвижного вала рядом с одним концом нажимной пластины по окружности, и торцевой молоток соединен с дальним концом опорного стержня от стационарного вала, причем торцевой молоток может находиться в контакте с роликом.
Предпочтительно, конкретными этапами построения динамической карты подземной угольной шахты на этапе S1 являются следующие:
① сканирование подземного дорожного пути лидаром и преобразование распределения трехмерных объектов в изображение облака точек;
② извлечение признаков окружающей среды:
бортовой контроллер обрабатывает изображение облака точек и извлекает признаки окружающей среды, такие как признаки ограждения дорожного пути, признаки колеи, специальные отметки и т.д.;
③ сопоставление и выверка признаков:
известная скорость электровоза сообщается бортовому контроллеру в реальном времени посредством связи по шине CAN; изображение облака точек, генерированное лидаром, содержит координаты объекта (x, y, z, roll, pitch, yaw), которые являются, соответственно, трехмерными координатами x, y, z, углом поворота по оси x, углом поворота по оси y, углом поворота по оси z;
при движении электровоза, когда извлечение признаков осуществляется в диапазоне сканирования лидара, необходимо сравнивать и сопоставлять различные положения путем объединения скорости электровоза и идентификационной карты с РЧ-меткой, и после этого создавать модель карты подземного дорожного пути в угольной шахте.
Точное статическое позиционирование на этапе S2 заключается в следующем:
UWB-позиционирование используется в двух следующих ситуациях: I: в неподвижном состоянии статическая ошибка UWB-позиционирования мала (меньше 30 см); II: электровоз только что включен, при включении электровоза также включается лидар, который не может точно определить свое положение, в это время используется UWB-позиционирование, и точное динамическое позиционирование используется, когда скорость движения электровоза увеличивается.
Предпочтительно, точное динамическое позиционирование на этапе S2 включает позиционирование, основанное на динамической карте лидара, инерциальное позиционировании и калибровку по пассивной идентификационной карте с РЧ-меткой; процесс позиционирования, основанный на динамической карте лидара, подобен процессу построения карты, где основными процессами являются следующие:
① сканирование подземного дорожного пути лидаром и преобразование распределения трехмерных объектов в изображение облака точек;
② извлечение признаков окружающей среды;
③ сопоставление и выверка признаков, сопоставление извлеченных признаков окружающей среды с созданной моделью карты, чтобы получить точное позиционирование; инерциальное позиционирование заключается в следующем: передача данных по скорости и направлению движения на автоматический контроллер по шине CAN, и контроллер может вычислять расстояние, пройденное электровозом по направлению движения и скорости движения.
Калибровка по пассивным идентификационным картам с РЧ-метками заключается в следующем: пассивная идентификационная карта с РЧ-меткой используется для позиционирования и калибровки там, где признаки дорожного пути не очевидны, или в главных положениях дорожного пути, таких как поворот дорожного пути, участок ограничения скорости, запретный участок и т.д.; пассивная идентификационная карта с РЧ-меткой расположена в середине колеи подземного дорожного пути, и шахтный искробезопасный картридер помещен в нижнюю часть электровоза, чтобы сканировать пассивную идентификационную карту с РЧ-меткой; каждая пассивная идентификационная карта с РЧ-меткой содержит уникальную адресную идентификационную информацию, карты с РЧ-метками размещены в главных точках дорожного пути согласно карте, созданной во время эксплуатации электровоза, карта с РЧ-меткой сканируется шахтным искробезопасным картридером, и встроенный адресный код радиочастотной метки передается в автоматический контроллер по протоколу TCP/IP, контроллер реверсивно анализирует положение электровоза, этим калибруя лидарное позиционирование, осуществляя лидарное позиционирование и позиционирование по радиочастотным меткам главных точек дорожного пути, чтобы повысить надежность автономной системы позиционирования;
многоколейное поперечное позиционирование применяет технологию пассивной идентификационной карты с РЧ-меткой; пассивные идентификационные карты с РЧ-метками, содержащими информацию по идентификации колеи, расположены с некоторым интервалом в середине каждой колеи, при движении электровоза бортовой картридер считывает РЧ-метки по очереди, и поэтому бортовой автоматический контроллер может оценивать эту конкретную колею и осуществлять горизонтальное позиционирование.
Электровоз включает тормозной механизм, тормозной механизм включает колеса и тормозной диск, электровоз оснащен некоторым множеством колес на обеих сторонах нижней части, тормозной диск соединен с осью электровоза посредством неподвижного вала, и колеса расположены на одном торце тормозного диска дальнем от оси.
Предпочтительно, торцевой молоток сферический, и ролик расположен между торцевым молотком и нажимной пластиной, воздуходувная труба расположена под наклоном в нижней части первого воздушного мешка, и воздух из воздуходувной трубы обдувает колеса.
Предпочтительно, верхняя часть дробящего стержня соединена с возможностью вращения с электровозом посредством подшипника, и наружная стенка дробящего стержня соединена со спиральным дробящим ножом.
Предпочтительно, один конец нажимной пластины, направленный к электровозу, соединен с гильзой, гильза установлена снаружи на опорный стержень, другой конец опорного стержня жестко соединен с электровозом, и горизонтальный стержень проходит через опорный стержень.
Предпочтительно, в нижней части электровоза расположен загрузочный ящик, оба конца загрузочного ящика снабжены установочным стержнем, установочный стержень снабжен на внешней стороне некоторым множеством камер, и обе стороны электровоза снабжены боковой пластиной с возможностью поворота.
Предпочтительно, обе стороны верхней части боковой пластины соединены с первой стойкой, первая стойка соединена с возможностью поворота с боковой стенкой электровоза, гидроцилиндр расположен с возможностью поворота над одной стороной боковой пластины рядом с электровозом посредством второй стойки, другой конец гидроцилиндра соединен с электровозом, второй воздушный мешок также расположен ниже одной стороны боковой пластины рядом с электровозом, боковая пластина снабжена пазом для хранения на обеих сторонах второго воздушного мешка, и несущий стержень расположен с возможностью поворота в пазе для хранения, один конец несущего стержня, дальний от гидроцилиндра, соединен с возможностью поворота с боковой пластиной посредством пальца, другой конец несущего стержня магнитно прикреплен к магнитной пластине, и магнитная пластина жестко соединена с верхней частью внутренней поверхности паза для хранения.
Предпочтительно, тормозная колодка прижимается снаружи к тормозному диску, причем тормозная колодка жестко соединена с электровозом; и на одном конце верхней части электровоза расположен блок управления, в котором расположены электрические узлы и детали.
Преимущества изобретения:
1. За счет применения нажимной пластины и вставной плиты: при вращении колес торцевой молоток на конце опорного стержня находится в контакте с роликом, толкает ролик и затем заставляет вертикальный стержень и горизонтальный стержень перемещаться к одному концу вставной плиты, этим приводя в движение нажимную пластину. После отделения торцевого молотка от ролика пружины растяжения притягивают нажимную пластину к электровозу, при этом вертикальный стержень и горизонтальный стержень возвращаются в свои исходные положения. Движение нажимной пластины вперед и назад сталкивает мусор перед электровозом вниз, и затем вставная плита в нижней части электровоза удаляет мусор с колеи электровоза, в результате чего мусор не влияет на нормальную эксплуатацию электровоза.
2. За счет применения первого воздушного мешка: первый воздушный мешок сжимается, когда вертикальный стержень перемещается к дробящему стержню в установочном пазе, в результате чего газ внутри первого воздушного мешка выходит из воздуходувных труб и сдувает угольный и другой мусор с колеи, очищая ее, и колеса движутся по колее более стабильно и без тряски. Угольный мусор не накапливается на колее из-за выдавливания колесами, что устраняет необходимость последующей очистки колеи, и препятствует сходу электровоза с рельс во время эксплуатации, повышая безопасность и стабильность. Газ может свободно входить в первый воздушный мешок и выходить из него, что позволяет неоднократно использовать первый воздушный мешок.
3. За счет применения дробящего стержня, когда горизонтальный стержень движется в установочном пазе, дробящий стержень может вращаться. При вращении, дробящий стержень измельчает мусор на колее, и крупный мусор может быть измельчен на мелкие частицы, что облегчает их сдувание газом, выходящим из воздуходувных труб, и, в конечном счете, препятствует накапливанию остатков мусора на колее; колея поддерживается в чистоте, и электровоз идет по ней плавно. Процесс очистки колеи осуществляется одновременно с очисткой колес, и при вращении колес колея поддерживается в чистоте.
4. За счет применения боковой пластины: в случае неисправности, когда персонал должен выполнить техническое обслуживание на внутреннем дорожном пути для транспортировки угля, персонал может использовать гидроцилиндр для поддержки боковой пластины в процессе технического обслуживания, и боковая пластина своей верхней частью предотвращает падение объектов сверху и нанесения ими травм персоналу, особенно в случае обрушения угольной шахты персонал под боковой пластиной будет защищен от обвала, так как пространство под боковой пластиной послужит для него убежищем. Более того, хранение воды, пищи и других повседневно необходимых вещей в загрузочном ящике составляет хорошую гарантию выживания персонала, и для персонала существует гарантия высокого уровня безопасности при ремонте электровоза. После установки боковой пластины в рабочее положение можно заполнить газом второй воздушный мешок, который при использовании обеспечивает амортизирующий эффект, этим улучшая защитный эффект боковой пластины.
5. Изобретение применяет лидарное позиционирование и объединяет инерциальное позиционирование и позиционирование посредством идентификационных карт с РЧ-метками, что значительно повышает точность позиционирования системы (в пределах 30 см). Лидарное позиционирование используется для тех участков дорожного пути, где признаки окружающей среды легко различить; инерциальное позиционирование используется главным образом в областях, где признаки окружающей среды на дорожном пути не очевидны и участка с идентификационной картой с РЧ-меткой нет; позиционирование с применением пассивных идентификационных карт с РЧ-метками используется на главных участках дорожного пути (повороты, участки ограничения скорости, запретные участки и т.д.), для калибровки лидарного позиционирования и инерциального позиционирования. Органическое объединение трех способов позиционирования обеспечивает применимость, стабильность и надежность системы.
Эта технология точного позиционирования электровозов обеспечивает сильную техническую поддержку для реализации вспомогательного и автономного вождения электровозов в угольных шахтах и имеет большое значение для строительства умных шахт, сокращения численности рабочих и повышения эффективности угольных шахт, а также повышает характеристики безопасности вспомогательного транспорта.
Краткое описание прилагаемых чертежей
Для облегчения понимания изобретения специалистами в данной области техники оно будет описано ниже со ссылками на прилагаемые чертежи, где:
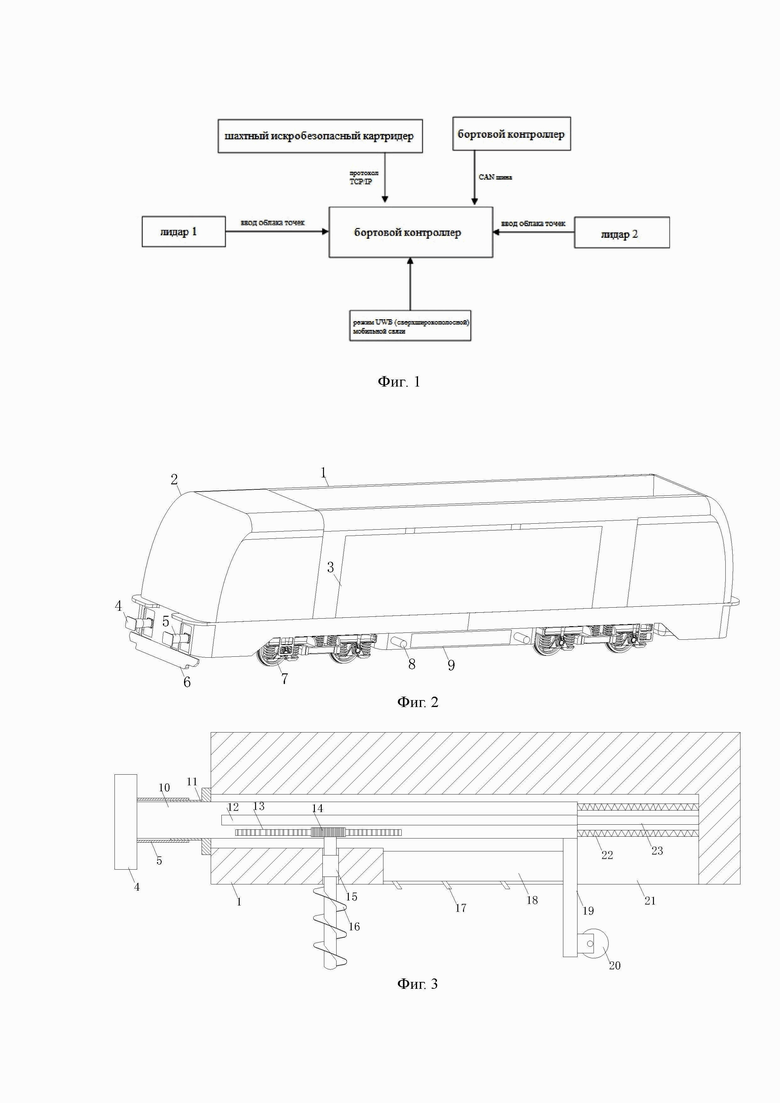
Фиг. 1 – блок-схема способа автономного позиционирования для шахтного электровоза согласно изобретению;
mine intrinsically safe card reader = шахтный искробезопасный картридер; vehicle controller = бортовой контроллер; laser radar = лидар; point cloud input = ввод облака точек; vehicle-mounted controller = бортовой контроллер; UWB mobile mode = режим UWB (сверхширокополосной) мобильной связи
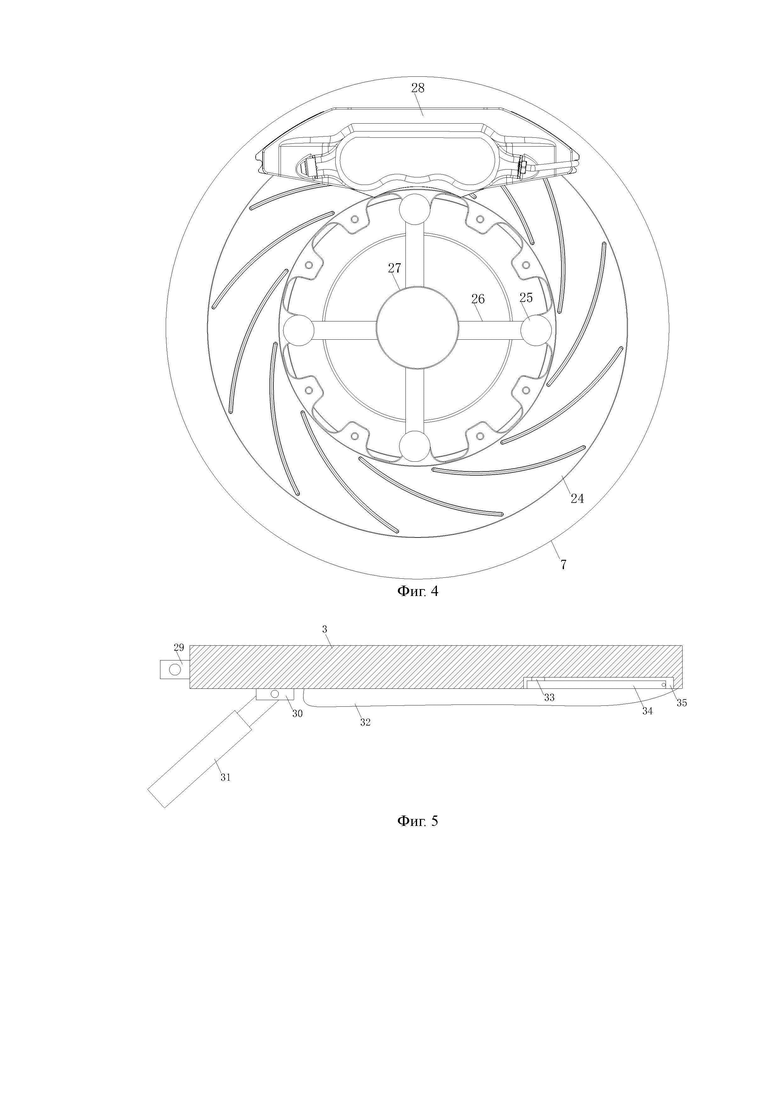
Фиг. 2 – общая схема электровоза согласно изобретению;
Фиг. 3 – схема установки нажимных пластин на электровозе согласно изобретению;
Фиг. 4 – схема установки опорных стержней согласно изобретению;
Фиг. 5 – конструкция боковой пластины согласно изобретению;
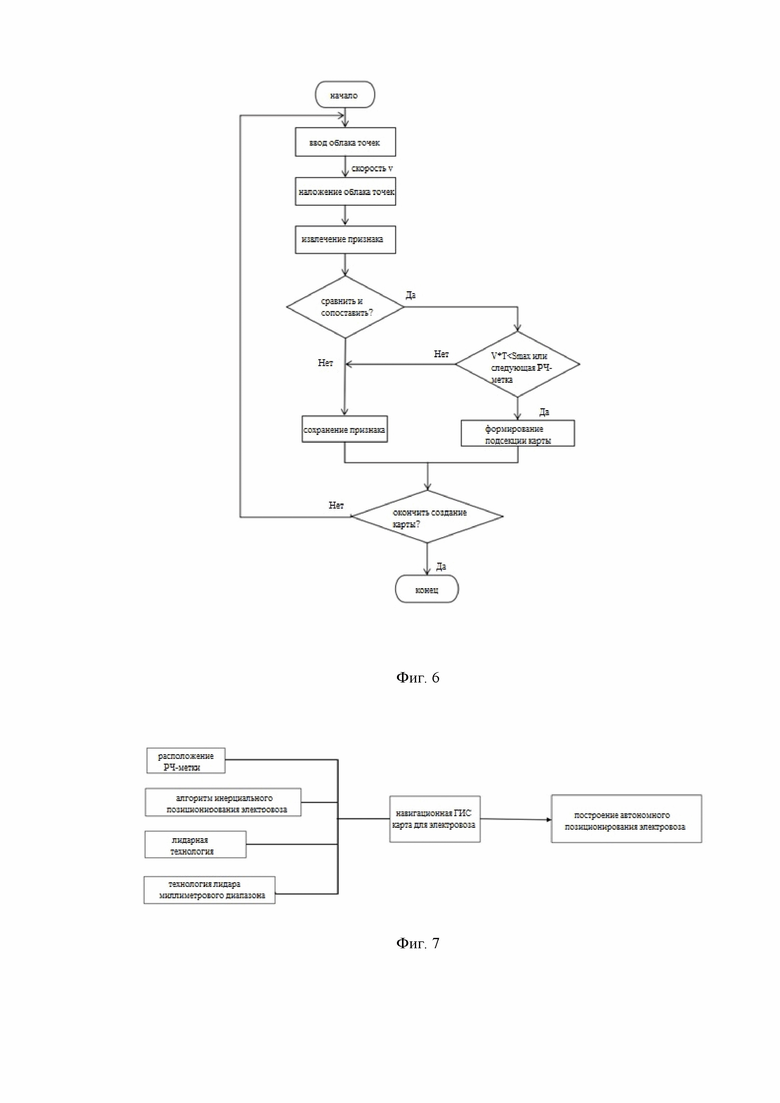
Фиг. 6 – процесс построения динамической карты согласно изобретению;
start = начало; point cloud input = ввод облака точек; speed = скорость; point cloud overlay = наложение облака точек; feature extraction = извлечение признака; compare and match? = сравнить и сопоставить?; Y = Да; N = Нет; OR New RFID = или следующая РЧ-метка; feature saving = сохранение признака; form map sub section = формирование подсекции карты; mapping end? = окончить создание карты; end = конец
Фиг. 7 – объединение разных способов динамического позиционирования согласно изобретению;
RFID position = расположение РЧ-метки; vehicle inertial positioning algorithm = алгоритм инерциального позиционирования электровоза; laser radar technology = лидарная технология; MMW laser radar technology = технология лидара миллиметрового диапазона; electric locomotive GIS navigation map = навигационная ГИС карта для электровоза; construct autonomous positioning of electric locomotive = построение автономного позиционирования электровоза
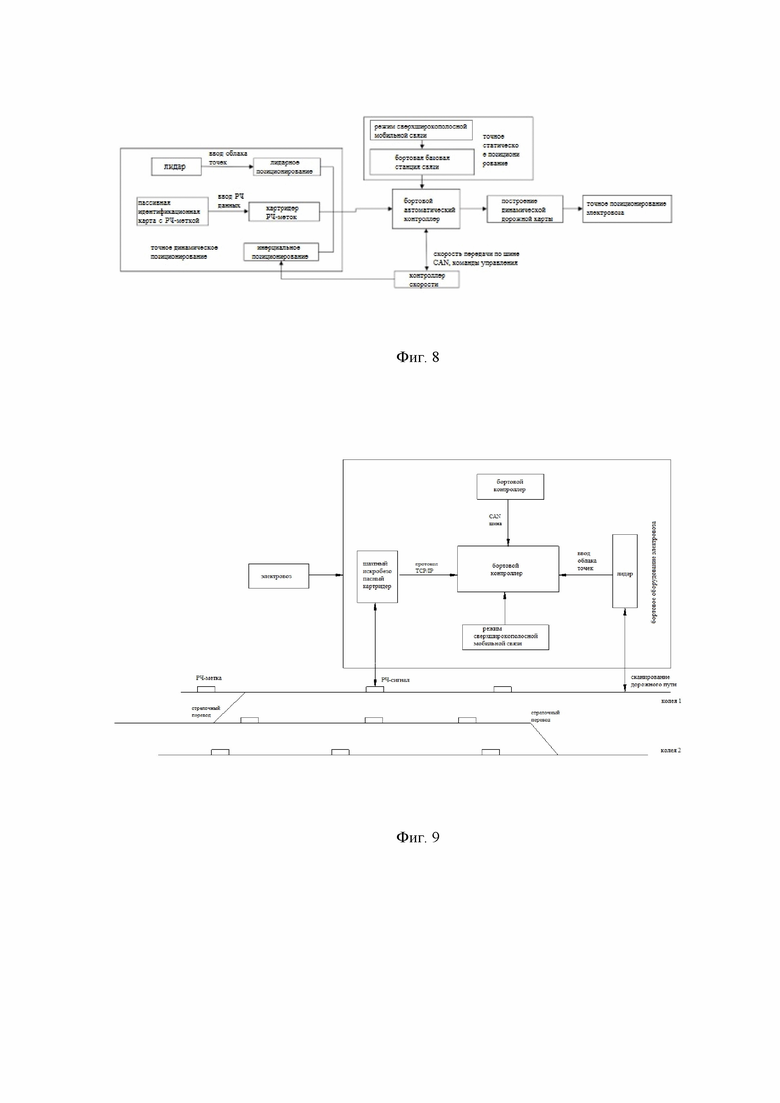
Фиг. 8 – блок-схема автономного позиционирования шахтного электровоза согласно изобретению.
laser radar = лидар; point cloud input = ввод облака точек; laser positioning = лидарное позиционирование; RFID passive identification card = пассивная идентификационная карта с РЧ-меткой; RF input = ввод РЧ данных; RFID card reader = картридер РЧ-меток; dynamic accurate positioning = точное динамическое позиционирование; inertial positioning = инерциальное позиционирование; UWB mobile mode = режим сверхширокополосной мобильно связи; vehicle-mounted communication base station = бортовая базовая станция связи; static accurate positioning = точное статическое позиционирование; vehicle-mounted unmanned controller = бортовой автоматический контроллер; CAN communication transmit speed, control instructions = скорость передачи по шине CAN, команды управления; speed controller = контроллер скорости; roadway dynamic map construction = построение динамической дорожной карты; accurate positioning of electric locomotive = точное позиционирование электровоза
Фиг. 9 – система ходовой колеи электровоза согласно изобретению;
electric locomotive = электровоз; vehicle controller = бортовой контроллер; mine intrinsically safe card reader = шахтный искробезопасный картридер; vehicle-mounted controller = бортовой контроллер; UWB mobile mode = режим сверхширокополосной мобильной связи; point cloud input = ввод облака точек; laser radar = лидар; vehicle-mounted equipment for electric locomotive = бортовое оборудование электровоза; roadway scanning = сканирование дорожного пути; RFID = РЧ-метка; RF signal = РЧ-сигнал; track = колея; rail switch = стрелочный перевод
На прилагаемых чертежах: 1 - электровоз; 2 – блок управления; 3 – боковая пластина; 4 – нажимная пластина; 5 - гильза; 6 – вставная плита; 7 – колесо; 8 – установочный стержень; 9 – загрузочный ящик; 10 – горизонтальный стержень; 11 – опорный стержень; 12 – желоб; 13 – рейка; 14 – зубчатое колесо; 15 – подшипник; 16 – дробящий стержень; 17 - воздуходувная труба; 18 – первый воздушный мешок; 19 – вертикальный стержень; 20 – ролик; 21 – установочный паз; 22 – пружина растяжения; 23 – направляющая; 24 – тормозной диск; 25 – торцевой молоток; 26 – опорный стержень; 27 – неподвижный вал; 28 – тормозная колодка; 29 – первая стойка; 30 – вторая стойка; 31 – гидроцилиндр; 32 – второй воздушный мешок; 33 – магнитная пластина; 34 – несущий стержень; 35 – паз для хранения.
Конкретные варианты осуществления изобретения
Ниже будут четко и полностью описаны технические схемы изобретения со ссылками на варианты осуществления, причем очевидно, что описанные варианты осуществления являются только частью вариантов осуществления изобретения, а не всеми вариантами осуществления. На основе вариантов осуществления изобретения, все другие варианты осуществления, полученные средними специалистами в данной области техники без приложения творческих усилий, должны подпадать под объем охраны изобретения.
На Фиг. 1-9 показан способ автономного позиционирования для шахтного электровоза с взрывобезопасной аккумуляторной батареей, причем способ позиционирования включает следующие этапы:
этап S1, построение динамической карты подземной угольной шахты, сканирование окружающей среды лидаром на частоте выше 10 Гц и передача данных на бортовой контроллер, построение динамической карты бортовым контроллером по карте распределения облака точек;
этап S2, шахтный электровоз может быть точно позиционирован посредством применения режима статического точного позиционирования, режима динамического точного позиционирования и режима многоколейного поперечного позиционирования;
этап S3, посредством объединения множественных режимов динамического позиционирования, когда шахтные электровозы работают нормально, в большинстве случаев применяется лидарное позиционирование, и инерциальное позиционирование применяется на участке, где дорожные признаки не очевидны и где лидар не может осуществлять точное распознавание; калибровка по идентификационным картам радиочастотных меток применяется в главных точках дорожного пути, и различные технологии динамического позиционирования объединены, чтобы осуществлять автономное позиционирование электровозов;
при этом,
электровоз включает тормозной механизм, тормозной механизм включает колеса 7 и тормозной диск 24, электровоз 1 оснащен некоторым множеством колес 7 на обеих сторонах нижней части, тормозной диск 24 соединен с осью электровоза посредством неподвижного вала 27, колеса 7 расположены на одном торце тормозного диска 24, дальнем от оси;
вставная плита 6 расположена в нижней части на одном конце электровоза 1, и две нажимные пластины 4. которые могут перемещаться по горизонтали, расположены на конце электровоза 1 над вставной плитой 6, один конец нажимной пластины 4 соединен с горизонтальным стержнем, и установочный паз 21 расположен под внутренней частью электровоза 1, один конец горизонтального стержня 10 заходит в установочный паз 21 и соединен с внутренним концом установочного паза 21 посредством некоторого множества пружин растяжения 22, внутренние стенки на обеих сторонах установочного паза 21 снабжены направляющей в продольном направлении, обе стороны горизонтального стержня 10 снабжены желобом 12, совпадающим с направляющей 23 в продольном направлении, и направляющая 23 может перемещаться по желобу 12, один конец горизонтального стержня 10, дальний от нажимной пластины 4, соединен с вертикальным стержнем 19 на обеих сторонах нижней части, нижняя часть одной стороны вертикального стержня 19, дальней от нажимной пластины, снабжена, для обеспечения возможности поворота, роликом 20; и первый воздушный мешок 18 расположен между одним концом внутреннего установочного паза 21 рядом с нажимной пластиной 4 и вертикальным стержнем 19, нижняя часть первого воздушного мешка 18 соединена с некоторым множеством воздуходувных труб 17; дробящий стержень 16 расположен с возможностью вращения на обеих сторонах нижней части электровоза 1, верхняя часть дробящего стержня 16 проходит в установочный паз 21 и соединена с зубчатым колесом 14 внутри, и наружная стенка горизонтального стержня 10 соединена с рейкой 13, которая входит в зацепление с зубчатым колесом 14.
Некоторое множество опорных стержней 26 соединены с наружной поверхностью неподвижного вала 27 рядом с одним концом нажимной пластины 4 по окружности, и торцевой молоток 25 соединен с концом опорного стержня 26, дальним от неподвижного вала 27, причем торцевой молоток 25 может находиться в контакте с роликом 20.
В качестве схемы технической оптимизации изобретения, торцевой молоток 25 сферический, и ролик 20 расположен между торцевым молотком 25 и нажимной пластиной 4, воздуходувная труба 17 расположена под наклоном в нижней части первого воздушного мешка 18, и воздух из воздуходувной трубы 17 обдувает колеса 7, газ из первого воздушного мешка 18 выходит по воздуходувным трубам 17 и сдувает угольный и другой мусор с колеи, очищая ее, и колес 7, которые движутся по колее более стабильно и без тряски.
В качестве схемы технической оптимизации изобретения, в которой верхняя часть дробящего стержня 16 соединена с возможностью вращения с электровозом 1 посредством подшипника 15, и наружная стенка ниже дробящего стержня (16) соединена со спиральным дробящим ножом.
В качестве схемы технической оптимизации изобретения, один конец нажимной пластины 4 в направлении электровоза 1 соединен с гильзой 5, гильза 5 установлена снаружи на опорный стержень 11, другой конец опорного стержня 11 жестко соединен с электровозом 1, и горизонтальный стержень 10 проходит через опорный стержень 11, гильза 5 обеспечивает прочность горизонтального стержня 10, когда гильза 5 перемещается снаружи опорного стержня 11, в результате чего горизонтальный стержень 10 не может быть легко деформирован силой, действующей на него.
В качестве схемы технической оптимизации изобретения, в нижней части электровоза 1 расположен загрузочный ящик 9, оба конца загрузочного ящика 9 снабжены установочным стержнем 8, установочный стержень 8 снабжен на внешней стороне некоторым множеством камер, и обе стороны электровоза 1 снабжены боковой пластиной 3, в загрузочном ящике 9 можно хранить повседневные вещи персонала и некоторые используемые инструменты. Камеры могут проверять нижнюю часть электровоза 1, и посредством камеры можно проверить, что произошло в конкретной ситуации.
В качестве схемы технической оптимизации изобретения, обе стороны верхней части боковой пластины 3 соединены с первой стойкой 29, первая стойка 29 соединена с возможностью поворота с боковой стенкой электровоза 1, гидроцилиндр 31 расположен с возможностью поворота над одной стороной боковой пластины 3 рядом с электровозом посредством второй стойки 30, другой конец гидроцилиндра 31 соединен с электровозом 1, второй воздушный мешок 32 также расположен ниже одной стороны боковой пластины 3 рядом с электровозом 1, боковая пластина 3 снабжена пазом 35 для хранения на обеих сторонах второго воздушного мешка 32, и несущий стержень 34 расположен с возможностью поворота в пазе 35 для хранения, один конец несущего стержня 34, дальний от гидроцилиндра 31, соединен с возможностью поворота с боковой пластиной 3 посредством пальца, другой конец несущего стержня 34 магнитно прикреплен к магнитной пластине 33, магнитная пластина 33 жестко соединена с верхней частью внутренней поверхности паза 35 для хранения, и боковая пластина 3 предназначена для защиты персонала.
В качестве схемы технической оптимизации изобретения, тормозная колодка 28 прижимается снаружи к тормозному диску 24, причем тормозная колодка 28 жестко соединена с электровозом 1; и на одном конце верхней части электровоза 1 расположен блок 2 управления, в котором расположены электрические узлы и детали.
Когда изобретение используется, колеса 7 под электровозом 1 размещены на колее дорожного пути в угольной шахте, и аккумуляторная батарея электровоза 1 подает электропитание на двигатель, и тогда двигатель может вращать колеса на колее посредством оси, в результате чего электровоз 1 может двигаться по дорожному пути в угольной шахте. Во время вращения колес 7 вместе с ними вращается опорный стержень 26. При повороте опорного стержня 26 торцевой молоток 25 на его конце контактирует с роликом 20, толкая ролик 20 и вызывая перемещение вертикального стержня 19 и горизонтального стержня 10 к одному концу вставной плиты 6, этим перемещая нажимную пластину 4. После отделения торцевого молотка 25 от ролика 20 пружины растяжения 22 притягивают нажимную пластину 4 в направлении к электровозу 1, и вертикальный стержень 19 и горизонтальный стержень 10 возвращаются в свои исходные положения. Движение нажимной пластины 4 вперед и назад сталкивает мусор перед электровозом 1 вниз, и затем вставная плита 6 в нижней части электровоза 1 удаляет мусор с колеи электровоза 1, в результате чего мусор не влияет на нормальную эксплуатацию электровоза 1.
Первый воздушный мешок 18 сжимается, когда вертикальный стержень 19 перемещается к дробящему стержню 16 в установочном пазе 21, в результате чего газ из первого воздушного мешка 18 выходит по воздуходувным трубам 17 и сдувает угольный и другой мусор с колеи, очищая ее, и колеса 7 движутся по колее более стабильно и без тряски. Угольный мусор не накапливается на колее из-за выдавливания колесами 7, что устраняет необходимость последующей очистки колеи, и препятствует сходу электровоза с рельс во время эксплуатации, повышая безопасность и стабильность. После возвращения вертикального стержня 19 в исходное положение первый воздушный мешок 18 вытягивается и расширяется, и газ извне поступает в первый воздушный мешок 18 по воздуходувным трубам 17, в результате чего газ может свободно входить в первый воздушный мешок и выходить из него, что позволяет неоднократно использовать первый воздушный мешок.
При перемещении горизонтального стержня 10 в установочном пазе 21 рейка 13 перемещается вместе с ним, вращая зубчатое колесо 14 во время движения и дробящий стержень 16. Когда дробящий стержень 16 вращается, он измельчает мусор на колее, измельчая крупный мусор на мелкие частицы, которые могут быть сдуты газом, поступающим по воздуходувным трубам 17, и, в конечном счете, препятствует накапливанию остатков мусора на колее; колея поддерживается в чистоте, и электровоз 1 идет по ней плавно.
Если электровоз 1 тормозит, колесо 7 больше не вращается, горизонтальный стержень 10, вертикальный стержень 19 и дробящий стержень 16 прекращают движение, процесс очистки колеи осуществляется одновременно с вращением колес 7, и после прохождения колес 7 колея остается чистой.
После остановки электровоза в случае неисправности персоналу необходимо получить доступ к электровозу на шахтном дорожном пути для проведения технического обслуживания, для этого персонал может использовать гидроцилиндр 31, чтобы поддерживать боковую пластину 3 во время технического обслуживания; после того, как боковая пластина 3 будет разложена в шахте, несущий стержень 34 вытягивают из паза 35 для хранения, чтобы несущий стержень 34 находился в контакте со стенкой дорожного пути и опирался на конец боковой пластины 3, в результате чего боковая пластина 3 приобретает хорошую устойчивость после раскладывания. Боковая пластина 3 своей верхней частью предотвращает падение объектов сверху, которые могут нанести травму персоналу, особенно при обрушении угольной шахты, боковая пластина 3 своей верхней частью предотвращает падение объектов сверху и нанесения ими травм персоналу, особенно в случае обрушения угольной шахты персонал под боковой пластиной будет защищен от обвала, так как пространство под боковой пластиной послужит для него убежищем. Более того, хранение воды, пищи и других повседневно необходимых вещей в загрузочном ящике составляет хорошую гарантию выживания персонала, и для персонала существует гарантия высокого уровня безопасности при ремонте электровоза 1. После установки боковой пластины 3 в рабочее положение можно заполнить газом второй воздушный мешок 32, который при использовании обеспечивает амортизирующий эффект, этим улучшая защитный эффект боковой пластины 3.
При эксплуатации электровоза 1 необходимо знать его положение на колее в реальном времени, чтобы вовремя принять меры для устранения неисправности. Для определения местонахождения электровоза 1 необходимо создать дорожную карту области эксплуатации шахтного электровоза и затем осуществить точное статическое и динамическое позиционирование на основе этой дорожной карты. Точное статическое и динамическое позиционирование осуществляется посредством точного статического позиционирования, точного динамического позиционирования и многоколейного поперечного позиционирования. Конкретные операции следующие:
1. построение динамической карты подземной угольной шахты
сканирование окружающей среды лидаром на частоте выше 10 Гц, и передача данных на бортовой контроллер, построение динамической карты бортовым контроллером по карте распределения облака точек. Этот этап заключается в следующем:
① сканирование подземного дорожного пути лидаром, и преобразование распределения трехмерных объектов в изображение облака точек;
② извлечение признаков окружающей среды;
бортовой контроллер обрабатывает изображение облака точек и извлекает признаки окружающей среды, такие как признаки ограждения дорожного пути, признаки колеи, специальные отметки и т.д.
③ сопоставление и выверка признаков:
известная скорость электровоза сообщается бортовому контроллеру в реальном времени посредством связи по шине CAN; изображение облака точек, генерированное лидаром, содержит координаты объекта (x, y, z, roll, pitch, yaw), которые являются, соответственно, трехмерными координатами x, y, z, углом поворота по оси x, углом поворота по оси y, углом поворота по оси z.
В отличие от наземного построения, в подземной угольной шахте, когда электровоз движется, очевидных признаков нет, поэтому извлечение признаков осуществляется в диапазоне сканирования лидара, и необходимо сравнивать и сопоставлять различные положения путем объединения скорости электровоза и идентификационных карт с РЧ-метками и после этого создавать модель карты подземного дорожного пути в угольной шахте. На Фиг. 6 показан процесс построения динамической карты.
2. Точное позиционирование шахтного электровоза
2.1 Точное статическое позиционирование
UWB-позиционирование используется в двух следующих ситуациях:
2.1.1 – электровоз находится в неподвижном состоянии:
статическая ошибка UWB-позиционирования мала (меньше 30 см); UWB-позиционирование соответствует системным требованиям;
2.1.2: электровоз только что включен
при включении электровоза также включается лидар, который не может точно определить свое положение, в это время используется UWB-позиционирование, и точное динамическое позиционирование используется, когда скорость движения электровоза увеличивается.
2.2 Точное динамическое позиционирование
2.2.1 – процесс позиционирования основан на динамической карте лидара
Процесс позиционирования основанный на динамической карте лидара подобен процессу построения дорожной карты, и основные процессы следующие:
① сканирование подземного дорожного пути лидаром, и преобразование распределения трехмерных объектов в изображение облака точек;
② извлечение признаков окружающей среды;
③ сопоставление и выверка признаков, сопоставление извлеченных признаков окружающей среды с созданной моделью карты для получения точного позиционирования.
2.2.2. Инерциальное позиционирование
Известна скорость движения электровоза; данные по скорости и направлению движения передаются автоматическому контроллеру по шине CAN, и контроллер может вычислять расстояние, пройденное электровозом по направлению движения и скорости движения; скорость передачи данных по шине CAN и период передачи в непрерывном режиме составляют 500 кбит/с и 20 мс, т.е. преимущества заключаются в высокой производительности в реальном времени и в надежном позиционировании; этот тип позиционирования используется главным образом на участке с РЧ-меткой без пассивной идентификационной карты и в сочетании с лидарным позиционированием.
2.2.3. Калибровка по пассивной идентификационной карте с РЧ-меткой
Пассивная идентификационная карта с РЧ-меткой используется для позиционирования и калибровки там, где признаки дорожного пути неочевидны или в главных точках дорожного пути (таких как повороты дорожного пути, участок ограничения скорости, запретный участок и т.д.).
Пассивная идентификационная карта с РЧ-меткой расположена в середине колеи подземного дорожного пути, и шахтный искробезопасный картридер помещен в нижнюю часть электровоза, чтобы сканировать РЧ-метки пассивных идентификационных карт. Каждая пассивная идентификационная карта с РЧ-меткой содержит уникальную адресную идентификационную информацию, карты с РЧ-метками размещены в главных точках дорожного пути согласно созданной дорожной карте, во время эксплуатации электровоза карта с РЧ-меткой сканируется шахтным искробезопасным картридером, и встроенный адресный код радиочастотной метки передается автоматическому контроллеру по протоколу TCP/IP, контроллер реверсивно анализирует положение электровоза, этим калибруя лидарное позиционирование, осуществляя двойное позиционирование (лидарное позиционирование и позиционирование по радиочастотным меткам) в главных точках дорожного пути, чтобы повысить надежность автономной системы позиционирования.
2.3 Многоколейное поперечное позиционирование
Для многоколейного поперечного позиционирования применяется технология пассивной идентификационной карты с РЧ-меткой; пассивные идентификационные с карты с РЧ-метками с информацией по идентификации колеи расположены с некоторым интервалом в середине каждой колеи, при движении электровоза бортовой картридер считывает РЧ-метки по очереди, и поэтому бортовой автоматический контроллер может оценивать эту конкретную колею и осуществлять горизонтальное позиционирование.
2.4 Объединение множественных режимов динамического позиционирования
Когда шахтные электровозы работают нормально, в большинстве случаев применяется лидарное позиционирование, и инерциальное позиционирование применяется на участке, где дорожные признаки не очевидны и где лидар не может осуществлять точное распознавание. Пассивная калибровка по радиочастотной метке идентификационной карты применяется в главных точках дорожного пути, и для повышение точности позиционирования и надежности системы в применении к разным промышленным и горнодобывающим средам объединяют разные технологии динамического позиционирования.
Предпочтительные варианты осуществления изобретения, раскрытые выше, использованы только для объяснения изобретения. Предпочтительные варианты осуществления не описывают все детали изобретения и не ограничивают изобретение конкретными вариантами осуществления, описанными выше. Очевидно, что, исходя из содержания настоящего описания изобретения, могут быть внесены многие модификации и изменения. Цель выбора и описания вариантов осуществления в настоящем описании изобретения заключается в том, чтобы лучше объяснить принцип и практическое применение изобретения, посредством чего специалисты в данной области техники смогут лучше понять и использовать изобретение. Изобретение ограничено только пунктами формулы изобретения и их эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСТРОЕНИЯ ДИНАМИЧЕСКОЙ ОГИБАЮЩЕЙ ЛИНИИ ШАХТНОГО ЭЛЕКТРОВОЗА | 2022 |
|
RU2818602C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| СПОСОБ И СЕРВЕР ДЛЯ ОБНОВЛЕНИЯ ПРЕДСТАВЛЕНИЯ КАРТЫ | 2024 |
|
RU2836391C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СТЕПЕНИ УХУДШЕНИЯ ЛИДАРНЫХ ДАННЫХ | 2021 |
|
RU2826476C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОБУЧЕНИЯ АЛГОРИТМА МАШИННОГО ОБУЧЕНИЯ С ЦЕЛЬЮ ОБНАРУЖЕНИЯ ОБЪЕКТОВ НА РАССТОЯНИИ | 2020 |
|
RU2775817C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОПРЕДЕЛЕНИЯ КОМПЬЮТЕРОМ НАЛИЧИЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2019 |
|
RU2767955C1 |
| Способ управления бортовыми системами беспилотных транспортных средств при помощи нейронных сетей на основе архитектуры трансформеров | 2024 |
|
RU2841111C1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ПРИСУТСТВИЯ ОБЪЕКТОВ | 2019 |
|
RU2769921C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ВЫБОРОЧНЫМ СКАНИРОВАНИЕМ | 2020 |
|
RU2792951C2 |
| СКАНЕР ДЛЯ ЛИДАРНОЙ СИСТЕМЫ, ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ИСПОЛЬЗОВАНИЕМ СКАНЕРА | 2020 |
|
RU2781619C2 |
Изобретение относится к определению местоположения подвижного состава. Способ автономного позиционирования для шахтного электровоза с взрывобезопасной аккумуляторной батареей заключается в том, что сканируют окружающую среду лидаром, передают данные на бортовой контроллер и строят динамическую карту подземной угольной шахты. При этом шахтный электровоз может быть точно позиционирован посредством применения режима статического точного позиционирования, режима динамического точного позиционирования и режима многоколейного поперечного позиционирования. Применяется лидарное позиционирование и инерциальное позиционирование. Калибровка по пассивной идентификационной карте с радиочастотной меткой применяется в главных точках дорожного пути. На конце электровоза расположены две нажимные пластины, которые могут перемещаться по горизонтали. Нажимная пластина соединена с горизонтальным стержнем, который соединен с вертикальным стержнем, нижняя часть которого соединена с роликом. На каждой стороне в нижней части электровоза расположен дробящий стержень, верхняя часть которого соединена с зубчатым колесом, которое входит в зацепление с рейкой горизонтального стержня. Технический результат заключается в повышении точности позиционирования электровозов. 8 з.п. ф-лы, 9 ил.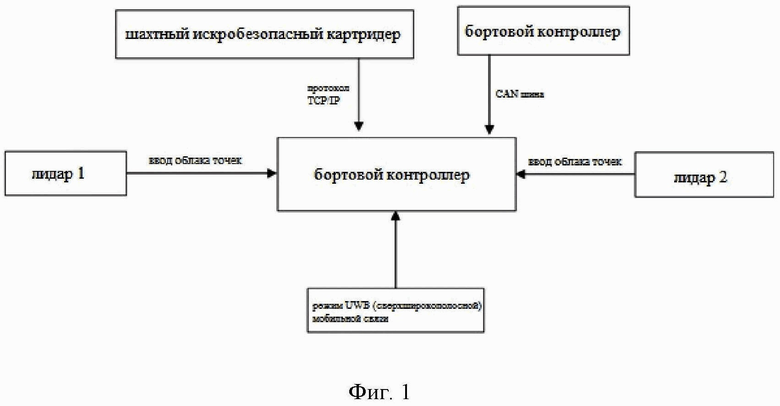
1. Способ автономного позиционирования для шахтного электровоза с взрывобезопасной аккумуляторной батареей, включающий следующие этапы:
этап S1 - построение динамической карты подземной угольной шахты, сканирование окружающей среды лидаром на частоте выше 10 Гц и передача данных на бортовой контроллер, построение динамической карты бортовым контроллером по карте распределения облака точек;
этап S2 - шахтный электровоз может быть точно позиционирован посредством применения режима статического точного позиционирования, режима динамического точного позиционирования и режима многоколейного поперечного позиционирования;
этап S3 - посредством объединения множественных режимов динамического позиционирования, когда шахтные электровозы работают нормально, в большинстве случаев применяется лидарное позиционирование, и инерциальное позиционирование применяется на участке, где дорожные признаки не очевидны и где лидар не может осуществлять точное распознавание; калибровка по пассивной идентификационной карте с радиочастотной (РЧ) меткой применяется в главных точках дорожного пути, и различные технологии динамического позиционирования объединены, чтобы осуществлять автономное позиционирование электровозов;
при этом электровоз включает тормозной механизм, тормозной механизм включает колеса (7) и тормозной диск (24), электровоз (1) оснащен некоторым множеством колес (7) на обеих сторонах нижней части, тормозной диск (24) соединен с осью электровоза посредством неподвижного вала (27), колеса (7) расположены на одном торце тормозного диска (24), дальнем от оси;
вставная плита (6) расположена в нижней части электровоза (1) на одном его конце, и две нажимные пластины (4), которые могут перемещаться по горизонтали, расположены на конце электровоза (1) над вставной плитой (6), нажимная пластина (4) на одной ее стороне соединена с горизонтальным стержнем (10), и установочный паз (21) расположен под внутренней частью электровоза (1), один конец горизонтального стержня (10) заходит в установочный паз (21) и соединен с внутренним концом установочного паза (21) посредством некоторого множества пружин растяжения (22), внутренние стенки на обеих сторонах установочного паза (21) снабжены направляющей (23) в продольном направлении, обе стороны горизонтального стержня (10) снабжены желобом (12), совпадающим с направляющей (23) в продольном направлении, и направляющая (23) расположена с возможностью перемещения в желобе (12), один конец горизонтального стержня (10), дальний от нажимной пластины (4), соединен с вертикальным стержнем (19) на обеих сторонах нижней части, нижняя часть одной стороны вертикального стержня (19), дальней от нажимной пластины (4), снабжена, для обеспечения возможности поворота, роликом (20); и первый воздушный мешок (18) расположен между одним концом внутреннего установочного паза (21) рядом с нажимной пластиной (4) и вертикальным стержнем (19), нижняя часть первого воздушного мешка (18) соединена с некоторым множеством воздуходувных труб (17); дробящий стержень (16) расположен с возможностью вращения на обеих сторонах нижней части электровоза (1), верхняя часть дробящего стержня (16) проходит в установочный паз (21) и соединена с зубчатым колесом (14) внутри, и наружная стенка горизонтального стержня (10) соединена с рейкой (13), которая входит в зацепление с зубчатым колесом (14);
некоторое множество опорных стержней (26) соединены с наружной стороной неподвижного вала (27) рядом с одним концом нажимной пластины (4) по окружности, и торцевой молоток (25) соединен с дальним концом опорного стержня (26) от неподвижного вала (27), причем торцевой молоток (25) может находиться в контакте с роликом (20).
2. Способ автономного позиционирования для шахтного электровоза с взрывобезопасной аккумуляторной батареей по п. 1, в котором конкретными этапами построения динамической карты подземной угольной шахты на этапе S1 являются следующие:
 сканирование подземного дорожного пути лидаром и преобразование распределения трехмерных объектов в изображение облака точек;
сканирование подземного дорожного пути лидаром и преобразование распределения трехмерных объектов в изображение облака точек;
 извлечение признаков окружающей среды;
извлечение признаков окружающей среды;
бортовой контроллер обрабатывает изображение облака точек и извлекает признаки окружающей среды, такие как признаки ограждения дорожного пути, признаки колеи, специальные отметки и т.д.;
 сопоставление и выверка признаков:
сопоставление и выверка признаков:
известная скорость электровоза сообщается бортовому контроллеру в реальном времени посредством связи по шине CAN; изображение облака точек, генерированное лидаром, содержит координаты объекта (x, y, z, roll, pitch, yaw), которые являются соответственно трехмерными координатами x, y, z, углом поворота по оси x, углом поворота по оси y, углом поворота по оси z;
при движении электровоза, когда извлечение признаков осуществляется в диапазоне сканирования лидара, необходимо сравнивать и сопоставлять различные положения путем объединения скорости электровоза и идентификационной карты с РЧ-меткой, и после этого создавать модель карты подземного дорожного пути в угольной шахте,
точное статическое позиционирование на этапе S2 заключается в следующем:
UWB-позиционирование используется в двух следующих ситуациях: I: в неподвижном состоянии статическая ошибка UWB-позиционирования мала (меньше 30 см); II: электровоз только что включен, при включении электровоза также включается лидар, который не может точно определить свое положение, в это время используется UWB-позиционирование, и точное динамическое позиционирование используется, когда скорость движения электровоза увеличивается.
3. Способ автономного позиционирования для шахтного электровоза с взрывобезопасной аккумуляторной батареей по п. 1, в котором точное динамическое позиционирование на этапе S2 включает позиционирование, основанное на динамической карте лидара, инерциальное позиционирование и калибровку по пассивной идентификационной карте с РЧ-меткой; процесс позиционирования, основанный на динамической карте лидара, подобен процессу построения карты и включает следующие основные процессы:
сканирование подземного дорожного пути лидаром и преобразование распределения трехмерных объектов в изображение облака точек;
извлечение признаков окружающей среды;
сопоставление и выверка признаков, сопоставление излеченных признаков окружающей среды с созданной моделью карты для получения точного позиционирования; инерциальное позиционирование заключается в следующем: сообщение скорости и направления движения на автоматический контроллер по шине CAN, и контроллер может вычислять расстояние, пройденное электровозом по направлению движения и скорости движения;
калибровка по пассивным идентификационным картам с РЧ-метками заключается в следующем: пассивная идентификационная карта с РЧ-меткой используется для позиционирования и калибровки там, где признаки дорожного пути не очевидны, или в главных точках дорожного пути, таких как поворот дорожного пути, участок ограничения скорости, запретный участок и т.д.; пассивная идентификационная карта с РЧ-меткой расположена в середине колеи подземного дорожного пути, и шахтный искробезопасный картридер помещен в нижнюю часть электровоза, чтобы сканировать пассивную идентификационную карту с РЧ-меткой; каждая пассивная идентификационная карта с РЧ-меткой содержит уникальную адресную идентификационную информацию, карты с РЧ-метками размещены в главных точках дорожного пути согласно карте, созданной во время эксплуатации электровоза, карта с РЧ-меткой сканируется шахтным искробезопасным картридером, и встроенный адресный код радиочастотной метки направляется в автоматический контроллер по протоколу TCP/IP, контроллер реверсивно анализирует положение электровоза, этим калибруя лидарное позиционирование, и осуществляет лидарное позиционирование и позиционирование по радиочастотным меткам в главных точках дорожного пути, чтобы повысить надежность автономной системы позиционирования;
многоколейное поперечное позиционирование применяет технологию пассивной идентификационной карты с РЧ-меткой; пассивные идентификационные карты с РЧ-метками, содержащими информацию по идентификации колеи, расположены с некоторым интервалом в середине каждой колеи, при движении электровоза бортовой картридер считывает РЧ-метки по очереди, и поэтому бортовой автоматический контроллер может оценивать эту конкретную колею и осуществлять горизонтальное позиционирование.
4. Способ автономного позиционирования для шахтного электровоза с взрывобезопасной аккумуляторной батареей по п. 1, в котором торцевой молоток (25) сферический и ролик (20) расположен между торцевым молотком (25) и нажимной пластиной (4), воздуходувная труба (17) расположена под наклоном в нижней части первого воздушного мешка (18) и воздух из воздуходувной трубы (17) обдувает колеса (7).
5. Способ автономного позиционирования для шахтного электровоза с взрывобезопасной аккумуляторной батареей по п. 4, в котором верхняя часть дробящего стержня (16) соединена с возможностью вращения с электровозом (1) посредством подшипника (15), и наружная стенка ниже дробящего стержня (16) соединена со спиральным дробящим ножом.
6. Способ автономного позиционирования для шахтного электровоза с взрывобезопасной аккумуляторной батареей по п. 5, в котором один конец нажимной пластины (4) в направлении электровоза (1) соединен с гильзой (5), гильза (5) установлена снаружи на опорный стержень (11), другой конец опорного стержня (11) жестко соединен с электровозом (1) и горизонтальный стержень (10) проходит через опорный стержень (11).
7. Способ автономного позиционирования для шахтного электровоза с взрывобезопасной аккумуляторной батареей по п. 6, в котором в нижней части электровоза (1) расположен загрузочный ящик (9), оба конца загрузочного ящика (9) снабжены установочным стержнем (8), установочный стержень (8) снабжен на внешней стороне некоторым множеством камер и обе стороны электровоза (1) снабжены боковой пластиной (3) с возможностью поворота.
8. Способ автономного позиционирования для шахтного электровоза с взрывобезопасной аккумуляторной батареей по п. 7, в котором обе стороны верхней части боковой пластины (3) соединены с первой стойкой (29), первая стойка (29) соединена с возможностью поворота с боковой стенкой электровоза (1), гидроцилиндр (31) расположен с возможностью поворота над одной стороной боковой пластины (3) рядом с электровозом (1) посредством второй стойки (30), другой конец гидроцилиндра (31) соединен с электровозом (1), второй воздушный мешок (32) также расположен ниже одной стороны боковой пластины (3) рядом с электровозом (1), боковая пластина (3) снабжена пазом (35) для хранения на обеих сторонах второго воздушного мешка (32) и несущий стержень (34) расположен с возможностью поворота в пазу (35) для хранения, один конец несущего стержня (34), дальний от гидроцилиндра (31), соединен с возможностью поворота с боковой пластиной (3) посредством пальца, другой конец несущего стержня (34) магнитно прикреплен к магнитной пластине (33) и магнитная пластина (33) жестко соединена с верхней частью внутренней поверхности паза (35) для хранения.
9. Способ автономного позиционирования для шахтного электровоза с взрывобезопасной аккумуляторной батареей по п. 8, в котором тормозная колодка (28) прижимается снаружи к тормозному диску (24), причем тормозная колодка (28) жестко соединена с электровозом (1); и на одном конце верхней части электровоза (1) расположен блок управления (2), в котором расположены электрические узлы и детали.
| CN 110514225 А, 29.11.2019 | |||
| CN 207228035 U, 13.04.2018 | |||
| CN 102053249 A, 11.05.2011 | |||
| Бортовая информационная система | 2020 |
|
RU2742960C1 |

