ОБЛАСТЬ ТЕХНИКИ
[0001] Изобретение относится к области построения динамической огибающей линии электровоза, в частности к способу построения динамической огибающей линии шахтного электровоза.
ОПИСАНИЕ УРОВНЯ ТЕХНИКИ
[0002] Шахтные электровозы являются главным типом вспомогательного транспорта. В настоящее время управление шахтными электровозами полностью возложено на машинистов, и такие человеческие факторы как усталость машиниста может легко приводить к проблемам с безопасностью, таким как ненамеренное превышение скорости, проезд на красный свет и наезды сзади. По статистике, происшествия с вспомогательным транспортом являются одним из трех главных типов происшествий в шахтах. Число дорожно-транспортных происшествий насчитывает 42,14% от общего числа происшествий, и число пострадавших насчитывает 41,12%. Происшествия с участием электровозов занимают первое место в общем число дорожно-транспортных происшествий. Поэтому необходимо срочно разработать беспилотные электровозы, чтобы снизить число рабочих, повысить эффективность работы в угольных шахтах и улучшить безопасность эксплуатации оборудования. Для беспилотных электровозов необходимо построить динамическую огибающую, чтобы автоматически детектировать условия на колее в угольной шахте.
[0003] Однако, динамическая огибающая существующих шахтных локомотивов все еще имеет определенные дефекты в процессе построения: технология динамического формирования изображений ходовой колеи электровоза в угольной шахте нестабильная, модель колеи, создаваемая обычным способом, является основной проблемой, скорость обработки низкая, и функция движущейся огибающей не может быть разделена; в то же время, электровоз испытывает тряску на колее в угольной шахте из-за нестабильной работы, вызываемой падающими камнями и обломками шлака, что легко приводит, с одной стороны, к неточности получаемых данных и сформированных изображений, и, с другой стороны, к сходу электровоза с рельсов и возникновению определенных опасностей.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0004] Цель изобретения заключается в том, чтобы предложить способ построения динамической огибающей линии шахтного электровоза, который бы решил проблемы определенных дефектов в процессе построения динамической огибающей существующих электровозов: технология динамического формирования изображений ходовой колеи электровоза в угольной шахте нестабильная, модель колеи, создаваемая обычным способом, является основной проблемой, скорость обработки низкая, и функция движущейся огибающей не может быть разделена; в то же время, электровоз испытывает тряску на колее в угольной шахте из-за нестабильной работы, вызываемой падающими камнями и обломками шлака, что легко приводит, с одной стороны, к неточности получаемых данных и сформированных изображений, и, с другой стороны, к сходу электровоза с рельсов и возникновению определенных опасностей.
[0005] Цель изобретения может быть реализована посредством следующих технических решений:
[0006] способ построения динамической огибающей линии шахтного электровоза, причем способ построения включает следующие этапы:
[0007] этап S1: система детектирования на устройстве построения отслеживает информацию по окружающей среде посредством динамического сканирования;
[0008] этап S2: автоматический контроллер движения формирует изображение просканированной информации по окружающей среде;
[0009] этап S3: автоматический контроллер движения выполняет идентификацию колеи посредством динамического формирования изображения, размечает область безопасности для движения вперед, и предоставляет полную информацию обратно в блок управления электровоза;
[0010] этап S4: блок управления электровоза выполняет автоматическое движение согласно цели электровоза и передней огибающей линии области безопасности; причем:
[0011] устройство построения также включает корпус, кабину и механизм движения; кабина закреплена на верхней части корпуса, и корпус снабжен источником электропитания; система детектирования закреплена на кабине, и механизм движения закреплен в нижней части корпуса; система детектирования включает лидарный датчик, радар миллиметрового диапазона и модуль обработки, и модуль обработки электрически соединен с лидарным датчиком и радаром миллиметрового диапазона; корпус снабжен разбрасывателем песка, и на наружной стороне кабины установлен буфер.
[0012] Предпочтительно, когда наземное транспортное средство на этапе S1 выполняет отслеживание окружающей среды посредством лидарного датчика, стабильная модель облака дорожных точек формируется путем наложения непрерывных многокадровых данных по облакам точек, на этом основании определяется положение колеи, и, в конечном счете, детектируются препятствия рядом с колеей; по результатам детектирования размечается область безопасности для движения вперед, и механизм соответствующей реакции реализуется следующим образом:
[0013] этап 1: создание стабильной модели дорожного пути:
[0014] в установленном на электровозе автоматическом контроллере движения эта модель основана на системе ПЗУ, и данные в реальном времени по облаку точек от лазерного датчика получают посредством функции библиотеки PCL облаков точек; данные облака точек имеют свой атрибут временной метки; система определяет последовательность непрерывных многокадровых данных по облакам точек посредством этого атрибута; частота сканирования лазерного датчика составляет 10 Гц, и изображение облака точек может быть сформировано за 100 мс; наложение непрерывных изображений многокадровых облаков точек осуществляется для наложения множества изображений облака точек согласно порядку данных по облакам точек, чтобы сформировать изображение более плотного облака точек; лазерный датчик снабжен встроенным инерциальным IMU-датчиком; IMU (инерциальный измерительный блок) предоставляет информацию по относительному позиционированию, и его функция заключается в измерении пройденного пути относительно объекта исходной точки; главными предоставляемыми параметрами являются x, y, z, roll, pitch и yaw; по этим параметрам можно моделировать трехмерное пространство, составленное из облаков точек;
[0015] посредством способов связи, таких как шина CAN, лазерный датчик получает скорость движения электровоза в реальном времени; по скорости электровоза в определенный момент времени можно определить относительное отношение положений между предыдущим кадром и следующим кадром изображения облака точек, скорректировать изображение облака точек следующего кадра и наложить его на изображение облака точек предыдущего кадра, и так далее, чтобы совместить многочисленные непрерывные изображения облаков точек для формирования изображения относительно стабильного и плотного облака точек;
[0016] после наложения данных по облаку точек модель восстанавливает изображение облака точек дорожного пути более реалистично; если при движении электровоза часто встречаются столкновения и тряска, создается виртуальное трехмерное пространство, и плоскость этого трехмерного пространства z = 0 определяется как фактическая поверхность земли; метод наименьших квадратов используется для подгонки данных по облаку точек в вертикальной плоскости из одного кадра изображения облака точек дорожного пути, за счет этого получают наклон линии регрессии относительно виртуальной плоскости и точку пересечения в вертикальном направлении; все данные по облаку точек этого кадра корректируются по полученному наклону и пересечению так, чтобы они совпадали с виртуальной плоскостью, и затем осуществляется наложение скорректированных данных этого кадра, чтобы в конечном итоге получить стабильную и четкую модель дорожного пути;
[0017] сначала задают уравнение линии регрессии:
[0018] где k - наклон и b - пересечение с осью y; поскольку линия поверхности земли не может быть перпендикулярной к оси x, уравнение линии пересечения можно использовать как уравнение линии регрессии; точку, задаваемую на вертикальной плоскости одного кадра изображения облака точек, можно выразить как:

[0019] оценивают сумму квадратичных ошибок от всех точек до линии:
[0020] применяя теорию экстремальных значений, можно видеть, что экстремальное значение может быть получено, когда первая производная уравнения ошибок равна 0, так что ее получают в отношении k и b соответственно, и значения k и b определяют так, чтобы функция ошибки принимала минимальное значение; ее можно получить следующим образом:
[0021] после упорядочения можно получить:
[0022] где:  ,
,  ,
,  ,
,  ; после оценки значений k и b, осуществляется их подстановка в уравнение регрессии, чтобы получить подогнанное уравнение прямой линии; по наклону k корректируется угол этого кадра изображения облака точек, чтобы уравнять его с виртуальной плоскостью; по пересечению b изображение облака точек транслируется так, чтобы оно располагалось на одном уровне с виртуальной плоскостью; каждый кадр изображения облака точек, полученный таким образом, будет находиться на одном уровне, чтобы достичь максимального совмещения, и этим получают изображение непрерывного, совмещенного из многих кадров облака точек стабильного и чистого дорожного пути;
; после оценки значений k и b, осуществляется их подстановка в уравнение регрессии, чтобы получить подогнанное уравнение прямой линии; по наклону k корректируется угол этого кадра изображения облака точек, чтобы уравнять его с виртуальной плоскостью; по пересечению b изображение облака точек транслируется так, чтобы оно располагалось на одном уровне с виртуальной плоскостью; каждый кадр изображения облака точек, полученный таким образом, будет находиться на одном уровне, чтобы достичь максимального совмещения, и этим получают изображение непрерывного, совмещенного из многих кадров облака точек стабильного и чистого дорожного пути;
[0023] этап 2: создание модели извлечения признаков колеи
[0024] исходя из фактической ситуации, есть два заметных признака подземной колеи, одним является то, что высота колеи значительно выше чем поверхность земли на обеих сторонах колеи, и разница в высоте составляет 10 см; другим является то, что интенсивность отражения колеи значительно ниже, чем интенсивность отражения поверхности земли;
[0025] по этим двум признакам создают модель, и создают два двухмерных массива, соответствующих фактической поверхности земли, чтобы нанести сетку на плоскость трехмерного пространства z = 0; значение одного из этих двухмерных массивов gridCell является значением z облака точек, соответствующим высоте фактического положения; значение другого двухмерного массива gridintensity является значением кривизны облака точек, соответствующим интенсивности отражения фактического положения; разрешение сетки устанавливают на 8 см;
[0026] количество данных по наложенным облакам точек огромное, и ограничение диапазона детектирования может значительно улучшить скорость движения; поскольку ширина колеи составляет 0,6 м, и колея обычно находится в пределах определенного диапазона впереди колеи, ширину диапазона детектирования устанавливают на 0,8 м вокруг центра изображения облака точек, что соответствует 20 сеткам в центре ряда изображения; осуществляется анализ значений двух массивов из 20 сеток в центре ряда; положение сетки, соответствующее значению gridCell 0,1, считается положением колеи; соответствующее положение сетки там, где значение gridintensity массива значительно меньше чем значение прилегающего массива, считается положением колеи; осуществляется интегрирование результатов анализа этих двух массивов, чтобы получить положение колеи ряда сетки; и т.д., когда электровоз находится в движении, положение колеи для каждого ряда в сетке вычисляется циклично, и, в конечном итоге, идентифицируется колея на изображении облака точек;
[0027] этап 3: идентификация препятствий
[0028] посредством модели извлечения признаков колеи, после того как колея идентифицирована правильно, осуществляется детектирования препятствий в определенном диапазоне рядом с колеей; вблизи сетки, соответствующей колее, размечается определенный диапазон, и в нем осуществляется детектирование, имеет ли массив gridCell, соответствующий этому диапазону, значение z; если это значение z больше чем ширина колеи и меньше чем высота электровоза, то определяется препятствие; после этого, расстояние между препятствием и электровозом оценивается по значению x препятствия, и электровоз может применить реакцию торможения посредством сообщения с системой управления двигателем.
[0029] Предпочтительно, механизм движения включает нижнюю раму, четыре колеса и две боковые рамы; боковая рама закреплена на наружных стенках на обеих сторонах нижней рамы; колеса установлены в нижней части нижней рамы, и два соседних колеса соединены вращающимся валом; передаточный механизм установлен в середине двух вращающихся валов, и ведущее зубчатое колесо находится в зацеплении с одной стороной двух передаточных механизмов; передаточный вал пропущен через середину ведущего зубчатого колеса; оба конца передаточного вала соединены с нагнетательным вентилятором, закрепленным в нижней части нижней рамы, и передаточный вал соединен с внутренней частью вентилятора и с лопастями внутри вентилятора; приводной двигатель, закрепленный в нижней части нижней рамы расположен между двумя вентиляторами; выходной вал приводного двигателя соединен с главным ведущим зубчатым колесом; главное ведущее зубчатое колесо находится в зацеплении с зацепляющимся зубчатым колесом, установленным на передаточный вал.
[0030] Предпочтительно, колесо включает ободья и ступицу; ободья расположены на наружных стенках обеих сторон ступицы; наружные стенки ступицы снабжены некоторым числом равномерно распределенных воздушных отверстий, и боковая стенка обода рядом со ступицей снабжена некоторым числом равномерно распределенных боковых отверстий; внутри ступица имеет промежуточную полость, и на одной стороне промежуточной полости расположена полость, которая находится в ступице; полость сообщается с промежуточной полостью, и промежуточная полость сообщается с воздушными отверстиями; внутри каждого из боковых отверстий установлена пневматическая телескопическая трубка, и эта пневматическая телескопическая трубка сообщается с полостью; вентилятор соединен с промежуточной полостью трубопроводом.
[0031] Предпочтительно, верхняя часть каждой боковой рамы зафиксирована несколькими амортизирующими пружинами, и верхние части амортизирующих пружин соединены с нижней частью корпуса электровоза; каждая боковая рама снабжена боковой опорой, закрепленной на боковой стенке нижней рамы на обеих сторонах, и боковая стенка каждой боковой опоры снабжена соединительным стержнем; верхний конец соединительного стержня закреплен на боковой стенке нижней рамы; внутри каждой боковой опоры установлены несколько боковых пружин.
[0032] Предпочтительно, одна сторона каждого из колес снабжена тормозным диском, установленным на вращающийся вал, и одна сторона каждого из тормозных дисков снабжена пневматическим тормозом, который используется вместе с диском; пневматический тормоз соединен с пневмоцилиндром в нижней части нижней рамы трубопроводом.
[0033] Преимущества изобретения: благодаря установке вентилятора в нижней части нижней рамы и соединения передаточного вала внутри вентилятора с лопастями внутри вентилятора, вентилятор приводится в действие передаточным валом при эксплуатации, так что вентилятор может работать автоматически, когда работает механизм движения, т.е. отдельного источника электропитания не требуется.
[0034] Поскольку обод колеса снабжен боковыми отверстиями с пневматической телескопической трубкой внутри, и ступица колеса снабжена воздушными отверстиями, вентилятор может направлять газ в промежуточную полость при работе. Поскольку промежуточная полость соединена с полостью, газ, поступающий в промежуточную полость одновременно поступает в полость; газ, поступающий в промежуточную полость, выходит из воздушных отверстий, так что механизм движения может использовать газ, выходящий из колес, чтобы очищать колею при работе, поэтому можно удалять обломки, упавшие на колею, чтобы избежать неточной информации на изображении, получаемой системой детектирования из-за тряски; в то же время, газ, поступающий в полость, поступает в пневматическую телескопическую трубку и вызывает выталкивание пневматической телескопической трубки из боковых отверстий; поскольку боковые отверстия расположены на боковой стенке обода, и поскольку колея имеет T-образную конструкцию, пневматическая телескопическая трубка, выталкиваемая из бокового отверстия, может доходить до положения ниже верхней части колеи, образуя защитную конструкцию, которая предотвращает сход колеса с рельса, обеспечивая точность результатов тестовой системы; в то же время изобретение корректирует все данные по облаку точек одного кадра по наклону и пересечению, чтобы они совпадали с виртуальной плоскостью, и затем совмещает скорректированные данные кадра, чтобы в конечном итоге получить стабильную и четкую модель дорожного пути. Поэтому технология динамического формирования изображений ходовой колеи электровоза в угольной шахте более стабильная и эффективная, и рабочая огибающая может быть быстро разделена на функции.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0035] Для облегчения понимания специалистами в данной области, изобретение будет далее описано со ссылками на чертежи.
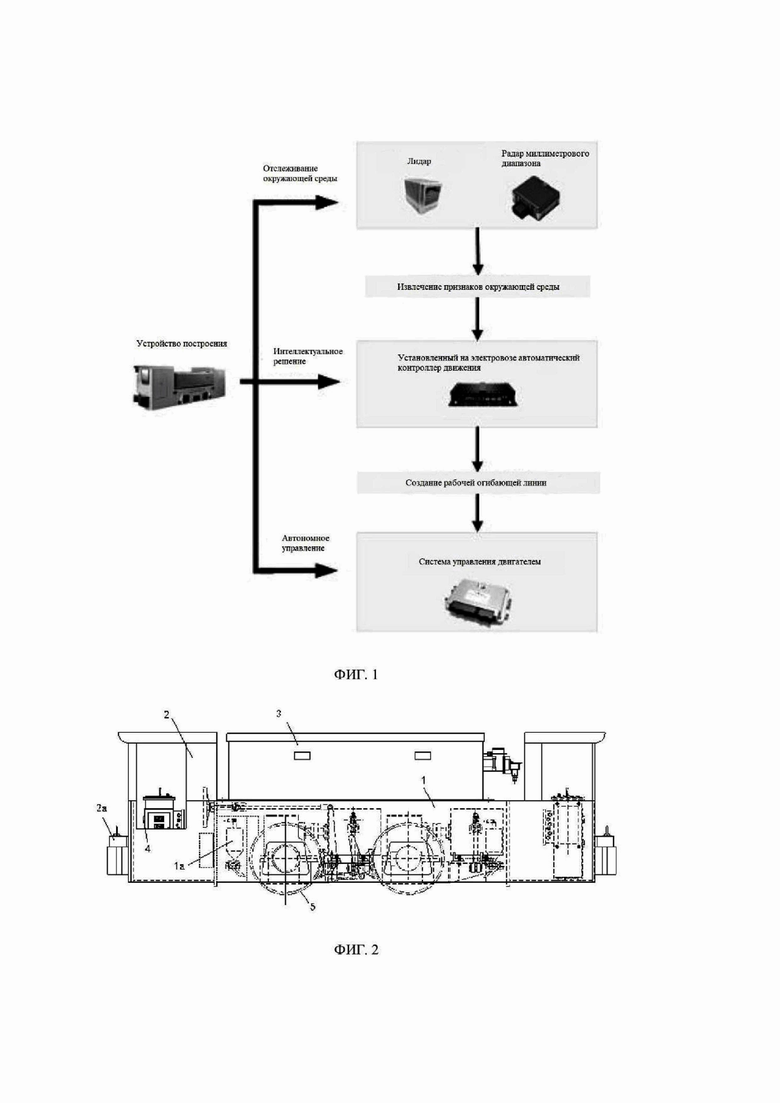
[0036] ФИГ. 1 – модульная схема согласно изобретению
Construction Device = устройство построения; Environmental Sensing = отслеживание окружающей среды; Intelligent Decision = интеллектуальное решение; Autonomous Control = автономное управление; LiDAR = лидар; Millimeter-Wave Radar = радар миллиметрового диапазона; Extract Environmental Features = извлечение признаков окружающей среды; Vehicle-Mounted Automatic Driving Controller = установленный на электровозе автоматический контроллер движения; Create an Operating Envelope Line = создание рабочей огибающей линии; Motor Drive System = система управления двигателем.
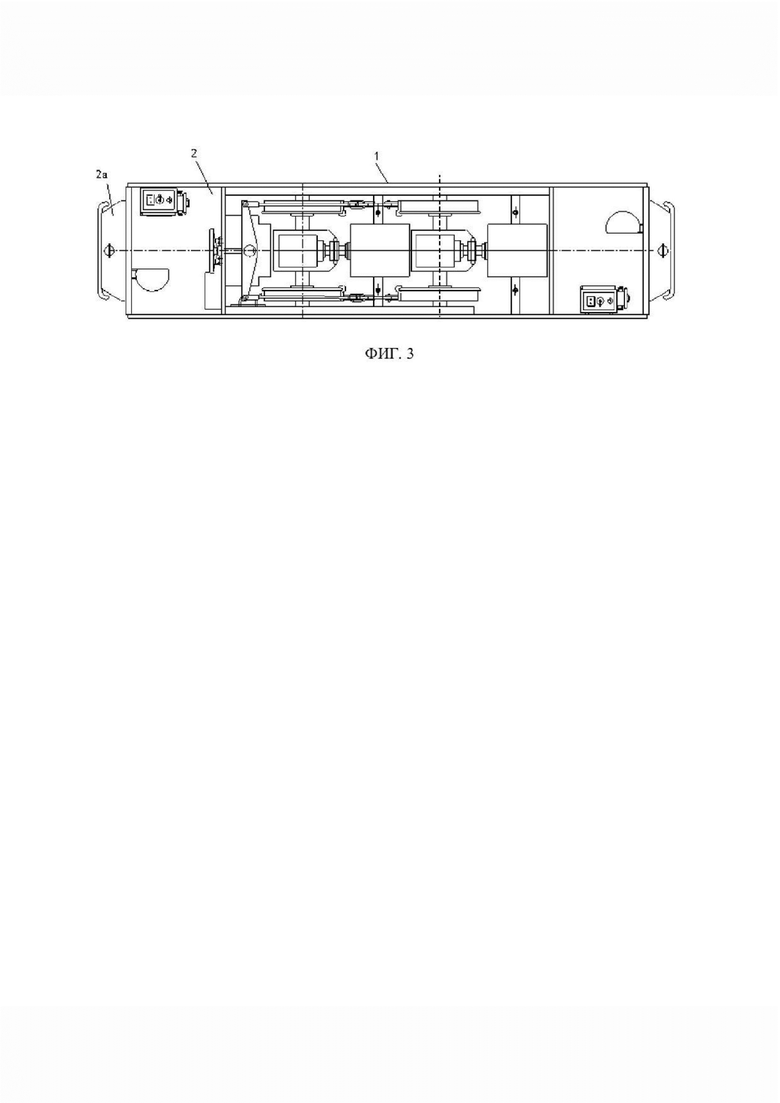
[0037] фиг. 2 – вид спереди общей конструкции устройства построения согласно изобретению.
[0038] фиг. 3 – вид сверху общей конструкции устройства построения согласно изобретению.
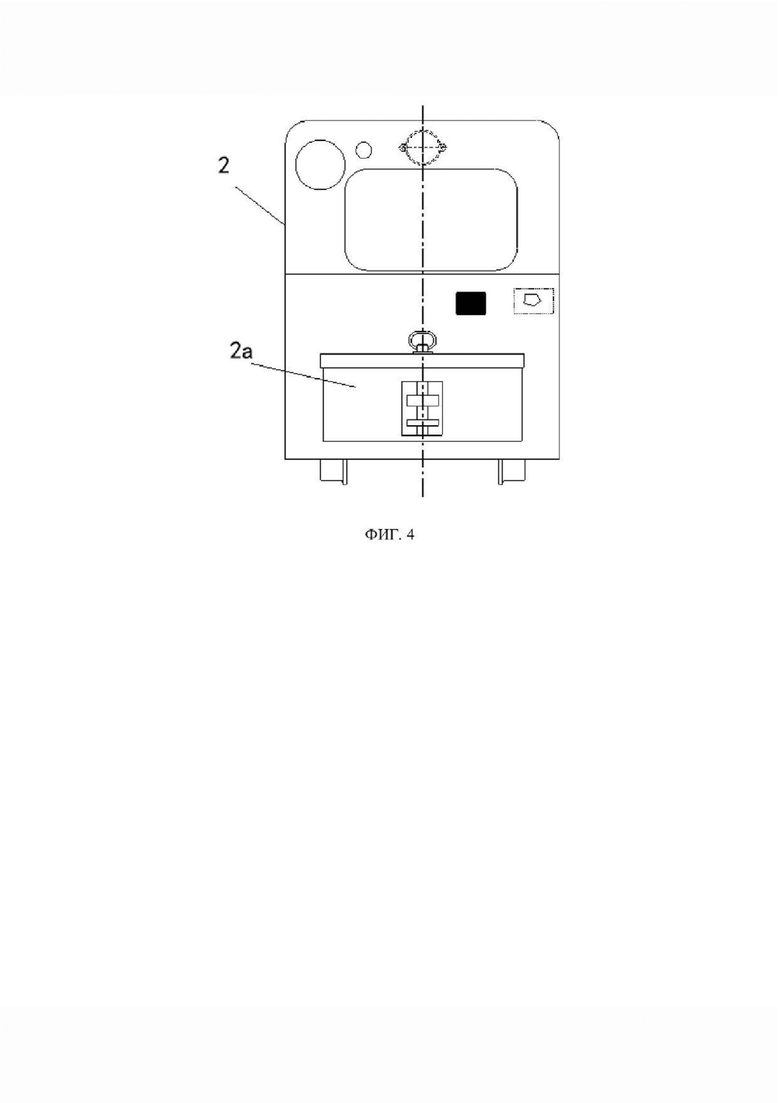
[0039] фиг. 4 – вид слева общей конструкции устройства построения согласно изобретению.
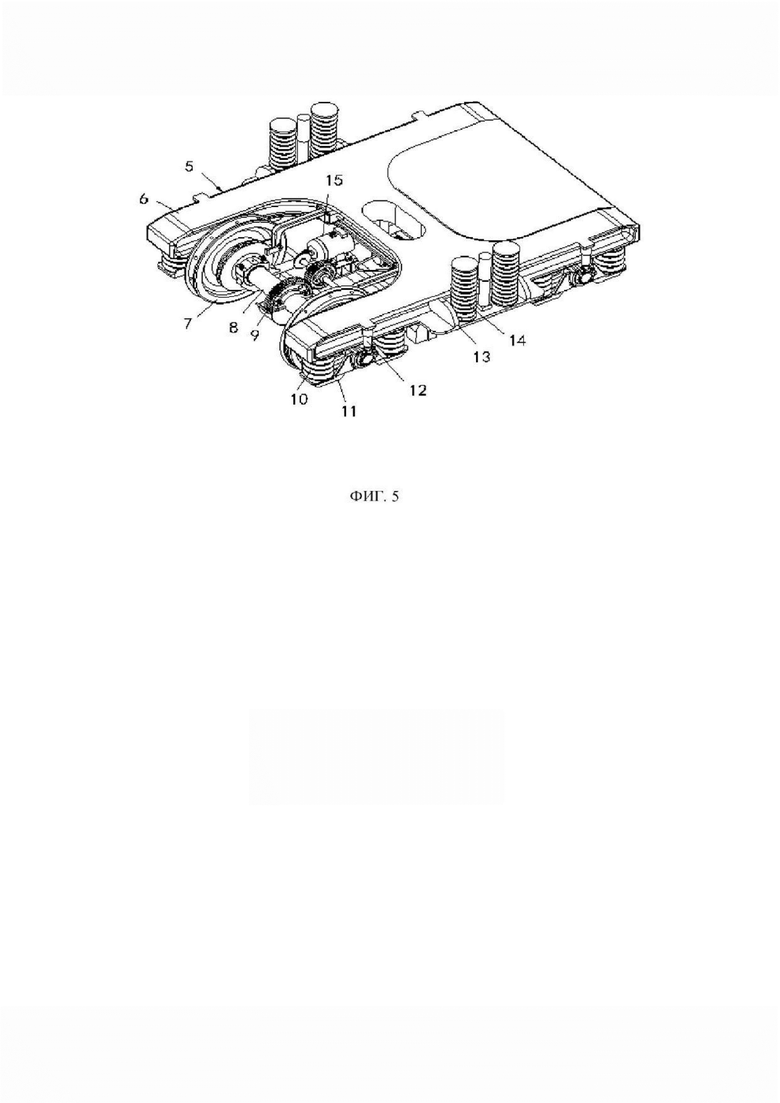
[0040] фиг. 5 – схема конструкции механизма движения согласно изобретению.
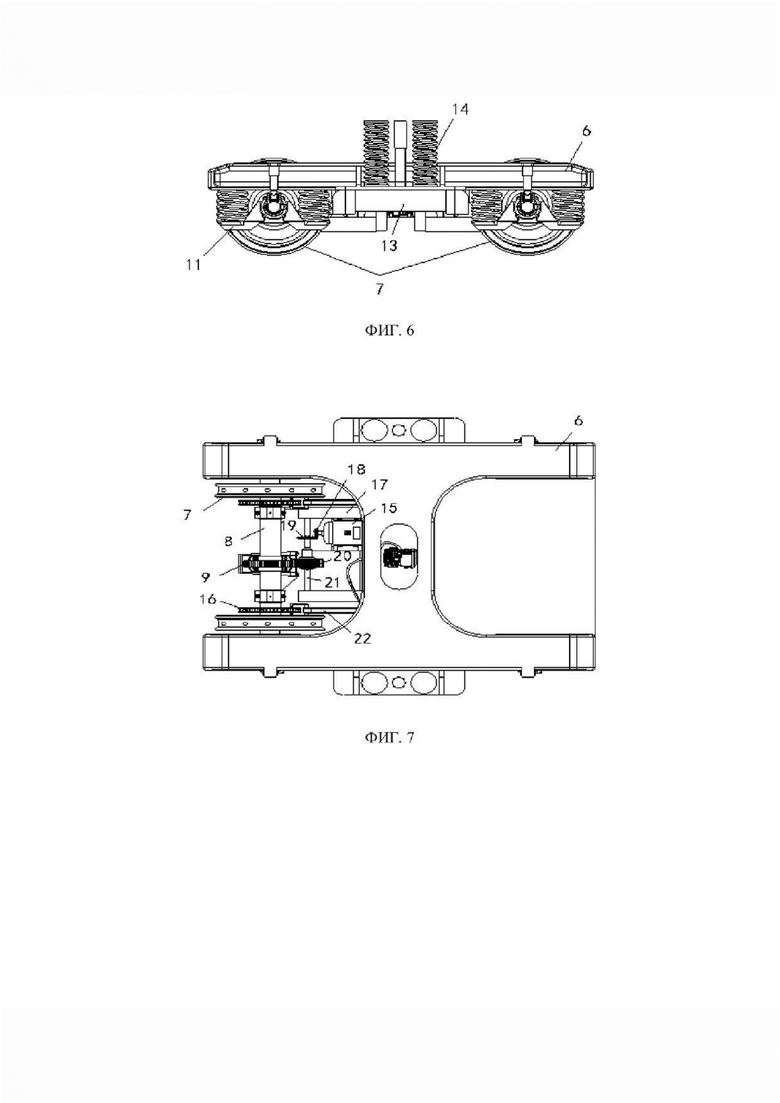
[0041] фиг. 6 – вид сбоку механизма движения согласно изобретению.
[0042] фиг. 7 – вид сверху механизма движения согласно изобретению.
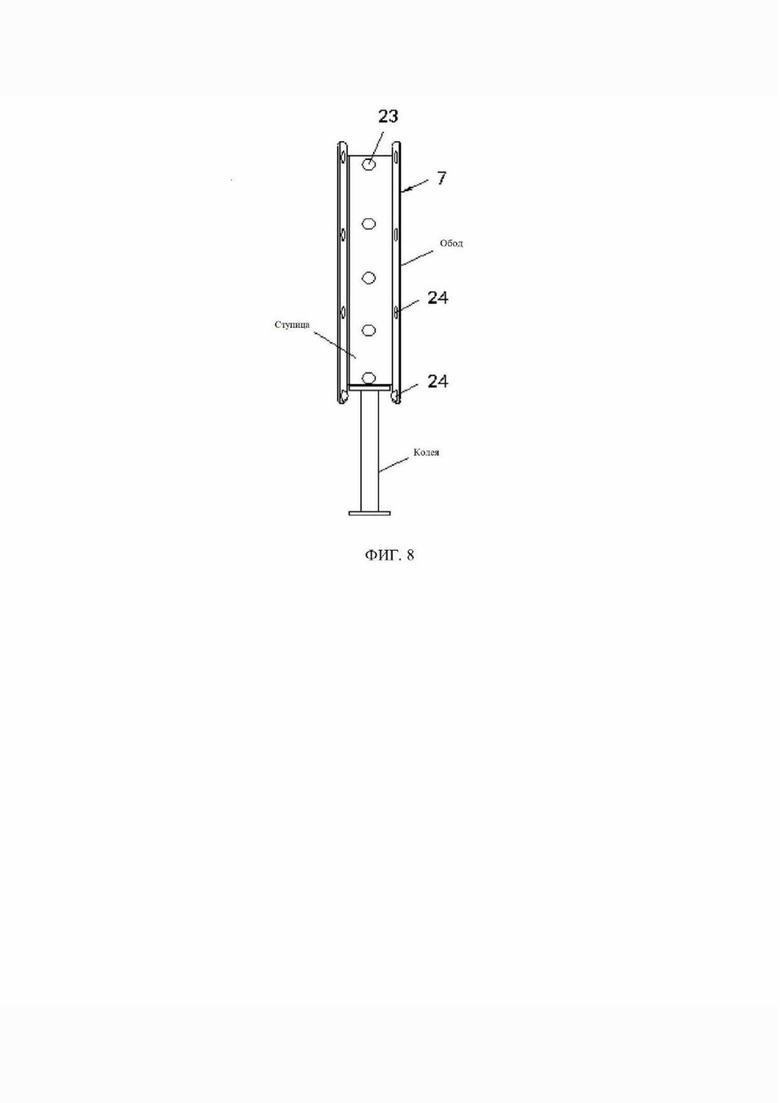
[0043] фиг. 8 – вид сбоку колеса согласно изобретению
Hub Body = ступица; Rim = обод; Track = колея.
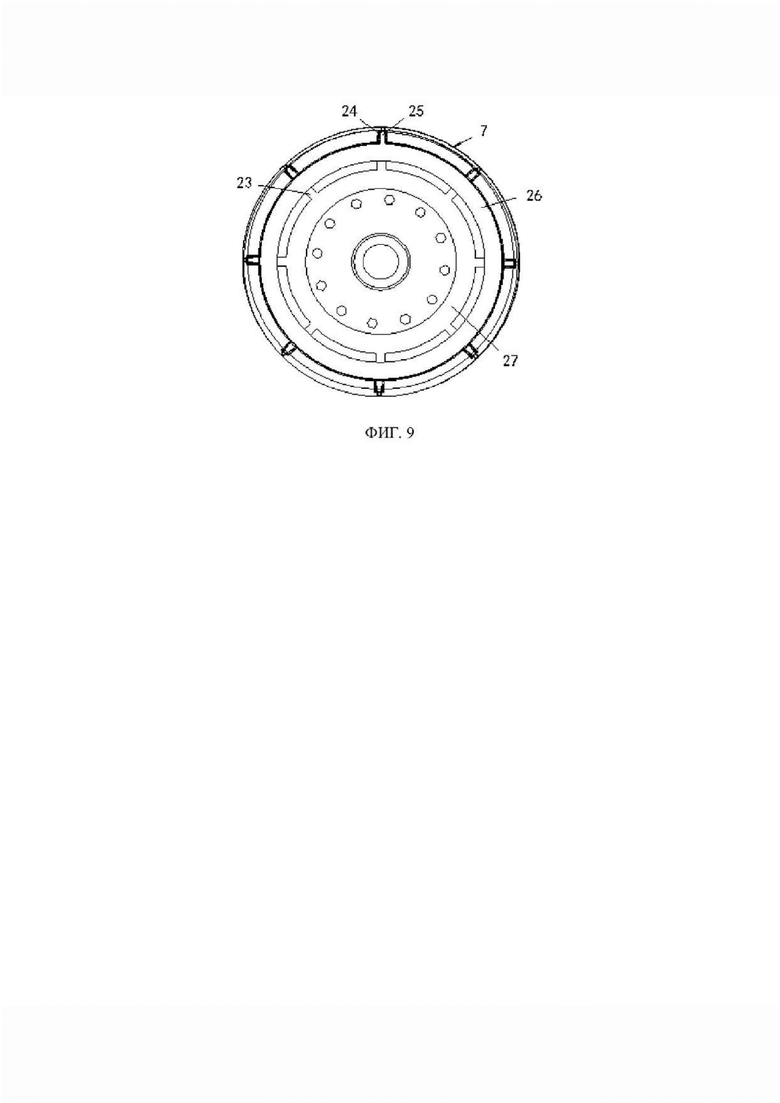
[0044] фиг. 9 – схема внутренней конструкции колеса согласно изобретению.
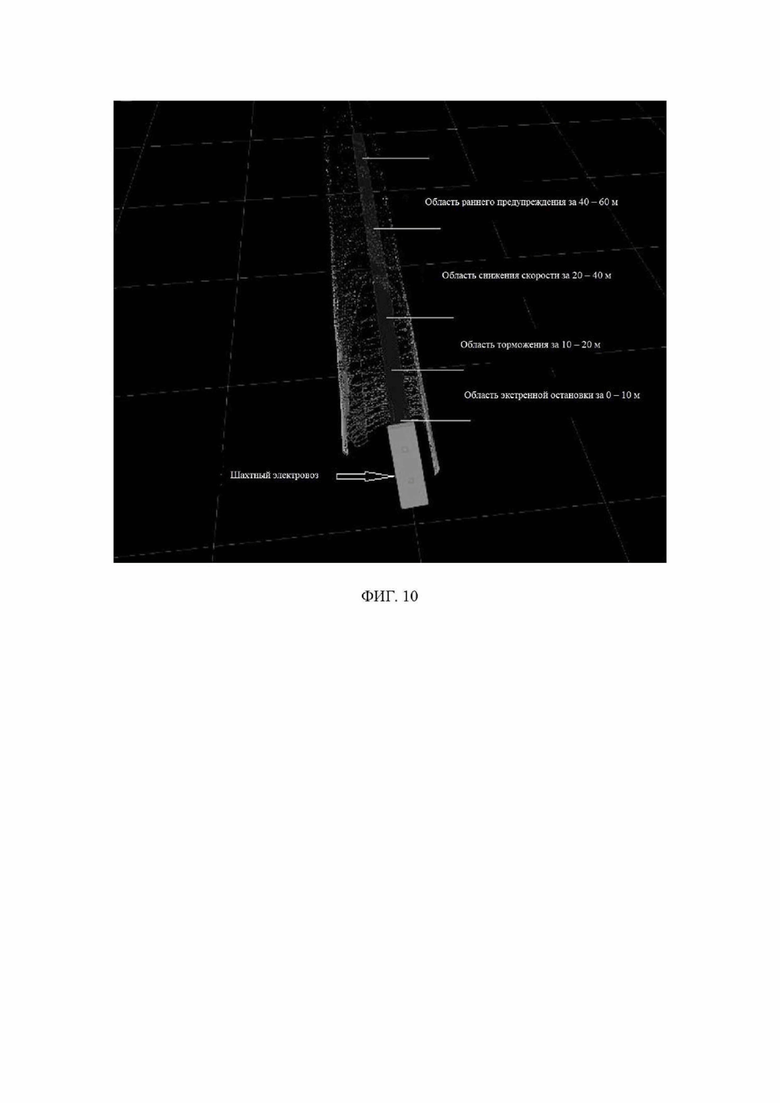
[0045] фиг. 10 – схема области огибающей линии безопасного движения, построенной согласно изобретению
Mining Rail Electric Locomotive = шахтный электровоз; 40-60m Early Warning Area = Область раннего предупреждения за 40 – 60 м; 20-40m Deceleration Area = область снижения скорости за 20 – 40 м; 10-20m Braking Area = область торможения за 10 – 20 м; 0-10m Emergency Stopping Area = область экстренной остановки за 0 – 10 м.
[0046] На чертежах: 1 – корпус электровоза; 1a – разбрасыватель песка; 2 – кабина; 2a – буфер; 3 – источник электропитания; 4 – система детектирования; 5 – механизм движения; 6 – нижняя рама; 7 – колесо; 8 – вращающийся вал; 9 – передаточный механизм; 10 – боковая пружина; 11 – боковая опора; 12 – соединительный стержень; 13 – боковая рама; 14 – амортизирующая пружина; 15 – приводной двигатель; 16 – тормозной диск; 17 – вентилятор; 18 – главное ведущее зубчатое колесо; 19 – зацепляющееся зубчатое колесо; 20 – ведущее зубчатое колесо; 21 – передаточный вал; 22 – пневматический тормоз; 23 – воздушное отверстие; 24 – боковое отверстие; 25 – пневматическая телескопическая трубка; 26 – полость; 27 – промежуточная полость.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0047] Ниже будут четко и полно описаны технические решения изобретения со ссылками на варианты осуществления. Очевидно, что описанные варианты осуществления являются только частью вариантов осуществления изобретения, а не всеми вариантами осуществления. На основе этих вариантов осуществления изобретения все другие варианты осуществления, полученные средними специалистами в данной области техники без приложения творческих усилий, должны подпадать под объем охраны изобретения.
[0048] Со ссылками на фиг. 1-10, предложен способ построения динамической огибающей линии шахтного электровоза, причем способ построения включает следующие этапы:
[0049] этап S1: система детектирования на устройстве построения отслеживает информацию по окружающей среде посредством динамического сканирования;
[0050] этап S2: автоматический контроллер движения формирует изображение просканированной информации по окружающей среде;
[0051] этап S3: автоматический контроллер движения выполняет идентификацию колеи посредством динамического формирования изображения, размечает область безопасности для движения вперед и предоставляет полную информацию обратно в блок управления электровоза;
[0052] этап S4: блок управления электровоза выполняет автоматическое движение согласно цели электровоза и передней огибающей линии области безопасности; причем:
[0053] когда огибающая линия безопасного движения построена согласно изобретению, исходя из характеристики, что максимальное безопасное расстояние торможения шахтного электровоза составляет 40 м, размечается рабочая область огибающей линии 60 м перед электровозом;
[0054] (1) область в пределах 40-60 м вперед является областью раннего предупреждения; если в этой области присутствуют пешеходы или препятствия, автоматический контроллер выдаст сообщение раннего предупреждения, электровоз совершит приготовления к замедлению хода, скорость движения получит команду на снижение, и скорость электровоза не должна быть выше 3 м/с;
[0055] (2) область в пределах 20-40 м вперед является областью снижения скорости; если в этой области присутствуют пешеходы или препятствия, автоматический контроллер выдаст команду на снижение скорости, и скорость электровоза не должна быть выше 1 м/с;
[0056] (3) область в пределах 10-20 м вперед является областью торможения; если в этой области присутствуют пешеходы или препятствия, автоматический контроллер выдаст команду на торможение, и электровоз должен снизить скорость до 0;
[0057] (4) область в пределах 0-10 м вперед является областью экстренной остановки; если в этой области присутствуют пешеходы или препятствия, автоматический контроллер выдаст команду на экстренное торможение, и электровоз должен немедленно остановиться;
[0058] устройство построения также включает корпус 1 электровоза, кабину 2 и механизм движения 5; кабина 2 закреплена на верхней части корпуса 1, и корпус 1 снабжен источником электропитания 3; система детектирования 4 закреплена на кабине 2, и механизм движения 5 закреплен в нижней части корпуса 1; система детектирования 4 включает лидарный датчик, радар миллиметрового диапазона, и модуль обработки, и модуль обработки электрически соединен с лидарным датчиком и радаром миллиметрового диапазона; корпус 1 снабжен разбрасывателем 1a песка, и на наружной поверхности кабины 2 установлен буфер 2a.
[0059] Конкретно, когда наземное транспортное средство на этапе S1 выполняет отслеживание окружающей среды посредством лидарного датчика, стабильная модель облака дорожных точек формируется путем наложения непрерывных многокадровых данных по облакам точек, на этом основании определяется положение колеи, и, в конечном счете, детектируются препятствия рядом с колеей; по результатам детектирования размечается область безопасности для движения вперед, и механизм соответствующей реакции реализуется следующим образом:
[0060] этап 1: создание стабильной модели дорожного пути
[0061] в установленном на электровозе автоматическом контроллере движения эта модель основана на системе ПЗУ, и данные в реальном времени по облаку точек от лазерного датчика получают посредством функции библиотеки PCL облаков точек; данные облака точек имеют свой атрибут временной метки; система определяет последовательность непрерывных многокадровых данных по облакам точек посредством этого атрибута; частота сканирования лазерного датчика составляет 10 Гц, и изображение облака точек может быть сформировано за 100 мс; наложение непрерывных изображений многокадровых облаков точек осуществляется для наложения множества изображений облака точек согласно порядку данных по облакам точек, чтобы сформировать изображение более плотного облака точек; лазерный датчик снабжен встроенным инерциальным IMU-датчиком; IMU (инерциальный измерительный блок) предоставляет информацию по относительному позиционированию, и его функция заключается в измерении пройденного пути относительно объекта исходной точки; главными предоставляемыми параметрами являются x, y, z, roll, pitch и yaw; по этим параметрам можно моделировать трехмерное пространство, составленное из облаков точек;
[0062] посредством способов связи, таких как шина CAN, лазерный датчик получает скорость движения электровоза в реальном времени; по скорости электровоза в определенный момент времени можно определить относительное отношение положений между предыдущим кадром и следующим кадром изображения облака точек, скорректировать изображение облака точек следующего кадра и наложить его на изображение облака точек предыдущего кадра, и так далее, чтобы совместить многочисленные непрерывные изображения облаков точек для формирования изображения относительно стабильного и плотного облака точек;
[0063] после наложения данных по облаку точек модель восстанавливает изображение облака точек дорожного пути более реалистично; если при движении электровоза часто встречаются столкновения и тряска, создается виртуальное трехмерное пространство, и плоскость этого трехмерного пространства z = 0 определяется как фактическая поверхность земли; метод наименьших квадратов используется для подгонки данных по облаку точек в вертикальной плоскости из одного кадра изображения облака точек дорожного пути, за счет этого получают наклон линии регрессии относительно виртуальной плоскости и точку пересечения в вертикальном направлении; все данные по облаку точек этого кадра корректируются по полученному наклону и пересечению так, чтобы они совпадали с виртуальной плоскостью, и затем осуществляется наложение скорректированных данных этого кадра, чтобы в конечном итоге получить стабильную и четкую модель дорожного пути;
[0064] сначала задают уравнение линии регрессии:
[0065] где k - наклон и b - пересечение с осью y; поскольку линия поверхности земли не может быть перпендикулярной к оси x, уравнение линии пересечения можно использовать как уравнение линии регрессии; точку, задаваемую на вертикальной плоскости одного кадра изображения облака точек, можно выразить как:
[0066] оценивают сумму квадратичных ошибок от всех точек до линии:
[0067] применяя теорию экстремальных значений, можно видеть, что экстремальное значение может быть получено, когда первая производная уравнения ошибок равна 0, так что ее получают в отношении k и b соответственно, и значения k и b определяют так, чтобы функция ошибки принимала минимальное значение; ее можно получить следующим образом:
[0068] после упорядочения можно получить:
[0069] где: , , , ; после оценки значений k и b, осуществляется их подстановка в уравнение регрессии, чтобы получить подогнанное уравнение прямой линии; по наклону k корректируется угол этого кадра изображения облака точек, чтобы уравнять его с виртуальной плоскостью; по пересечению b изображение облака точек транслируется так, чтобы оно располагалось на одном уровне с виртуальной плоскостью; каждый кадр изображения облака точек, полученный таким образом, будет находиться на одном уровне, чтобы достичь максимального совмещения, и этим получают изображение непрерывного, совмещенного из многих кадров облака точек стабильного и чистого дорожного пути;
[0070] этап 2: создание модели извлечения признаков колеи
[0071] исходя из фактической ситуации, есть два заметных признака подземной колеи, одним является то, что высота колеи значительно выше чем поверхность земли на обеих сторонах колеи, и разница в высоте составляет 10 см; другим является то, что интенсивность отражения колеи значительно ниже, чем интенсивность отражения поверхности земли;
[0072] по этим двум признакам создают модель, и создают два двухмерных массива, соответствующих фактической поверхности земли, чтобы нанести сетку на плоскость трехмерного пространства z = 0; значение одного из этих двухмерных массивов gridCell является значением z облака точек, соответствующим высоте фактического положения; значение другого двухмерного массива gridintensity является значением кривизны облака точек, соответствующим интенсивности отражения фактического положения; разрешение сетки устанавливают на 8 см;
[0073] количество данных по наложенным облакам точек огромное, и ограничение диапазона детектирования может значительно улучшить скорость движения; поскольку ширина колеи составляет 0,6 м, и колея обычно находится в пределах определенного диапазона впереди колеи, ширину диапазона детектирования устанавливают на 0,8 м вокруг центра изображения облака точек, что соответствует 20 сеткам в центре ряда изображения; осуществляется анализ значений двух массивов из 20 сеток в центре ряда; положение сетки, соответствующее значению gridCell 0,1, считается положением колеи; соответствующее положение сетки там, где значение gridintensity массива значительно меньше чем значение прилегающего массива, считается положением колеи; осуществляется интегрирование результатов анализа этих двух массивов, чтобы получить положение колеи ряда сетки; и т.д., когда электровоз находится в движении, положение колеи для каждого ряда в сетке вычисляется циклично, и, в конечном итоге, идентифицируется колея на изображении облака точек;
[0074] этап 3: идентификация препятствий
[0075] посредством модели извлечения признаков колеи, после того как колея идентифицирована правильно, осуществляется детектирования препятствий в определенном диапазоне рядом с колеей; вблизи сетки, соответствующей колее, размечается определенный диапазон, и в нем осуществляется детектирование, имеет ли массив gridCell, соответствующий этому диапазону, значение z; если это значение z больше чем ширина колеи и меньше чем высота электровоза, то определяется препятствие; после этого, расстояние между препятствием и электровозом оценивается по значению x препятствия, и электровоз может применить реакцию торможения посредством сообщения с системой управления двигателем.
[0076] Механизм движения 5 включает нижнюю раму 6, четыре колеса 7 и две боковые рамы 13; боковая рама 13 закреплена на наружных стенках на обеих сторонах нижней рамы 6; колеса 7 установлены в нижней части нижней рамы 6, и два соседних колеса 7 соединены вращающимся валом 8; передаточный механизм 9 установлен в середине двух вращающихся валов 8, и ведущее зубчатое колесо 20 находится в зацеплении с одной стороной двух передаточных механизмов 9; передаточный вал 21 пропущен через середину ведущего зубчатого колеса 20; оба конца передаточного вала 21 соединены с нагнетательным вентилятором 17, закрепленным в нижней части нижней рамы 6, и передаточный вал 21 соединен с внутренней частью вентилятора и с лопастями внутри вентилятора 17; приводной двигатель 15, закрепленный в нижней части нижней рамы расположен между двумя вентиляторами 17; выходной вал приводного двигателя 15 соединен с главным ведущим зубчатым колесом 18; главное ведущее зубчатое колесо 18 находится в зацеплении с зацепляющимся зубчатым колесом 19, установленным на передаточный вал 21.
[0077] Колесо 7 включает ободья и ступицу; ободья расположены на наружных стенках обеих сторон ступицы; наружные стенки ступицы снабжены некоторым числом равномерно распределенных воздушных отверстий 23, и боковая стенка обода рядом со ступицей снабжена некоторым числом равномерно распределенных боковых отверстий 24; внутри ступица имеет промежуточную полость 27, и на одной стороне промежуточной полости 27 расположена полость 26, которая находится в ступице; полость 26 сообщается с промежуточной полостью 27, и промежуточная полость 27 сообщается с воздушными отверстиями 23; внутри каждого из боковых отверстий 24 установлена пневматическая телескопическая трубка 25, и эта пневматическая телескопическая трубка 25 сообщается с полостью 26; вентилятор 17 соединен с промежуточной полостью 27 трубопроводом.
[0078] Верхняя часть каждой боковой рамы 13 зафиксирована несколькими амортизирующими пружинами 14, и верхние части амортизирующих пружин 14 соединены с нижней частью корпуса 1 электровоза; каждая боковая рама 13 снабжена боковой опорой 11, закрепленной на боковой стенке нижней рамы 6 на обеих сторонах, и боковая стенка каждой боковой опоры 11 снабжена соединительным стержнем 12; верхний конец соединительного стержня 12 закреплен на боковой стенке нижней рамы 6; внутри каждой боковой опоры 11 установлены несколько боковых пружин 10.
[0079] Одна сторона каждого из колес 7 снабжена тормозным диском 16, установленным на вращающийся вал 8, и одна сторона каждого из тормозных дисков 16 снабжена пневматическим тормозом 22, который используется вместе с диском; пневматический тормоз 22 соединен с пневмоцилиндром в нижней части нижней рамы 6 трубопроводом.
[0080] Этапы эксплуатации устройства построения согласно изобретению следующие:
[0081] этап 1: после запуска всего устройства работают оба приводных двигателя 15 в механизме 5 движения, и приводной двигатель 15 используется для вращения главного ведущего зубчатого колеса 18; главное ведущее зубчатое колесо 18 использует зацепляющееся зубчатое колесо 19 для вращения передаточного вала 21 в процессе вращения, и передаточный вал 21 использует ведущее зубчатое колесо 20 для вращения передаточного механизма 9 в процессе вращения, этим вращая колеса 7, что реализует перемещение положения механизма движения 5; механизм движения 5 обеспечивает перемещение всего устройства по шахтной колее вместе с перемещением положения; при вращении передаточного вала 21, поскольку оба конца передаточного вала 21 соединены с вентилятором 17, закрепленным в нижней части нижней рамы 6, и передаточный вал 21 соединен с внутренней частью вентилятора 17 и с лопастями вентилятора 17, вентилятор 17 работает от передаточного вала 21; вентилятор 17 направляет газ в промежуточную полость 27 при работе; газ, поступающий в промежуточную полость 27, одновременно поступает в полость 26; газ, поступающий в промежуточную полость 27, выходит из воздушных отверстий 23, так что механизм движения может использовать газ, выходящий из колес, чтобы очищать колею при работе, поэтому можно удалять обломки, упавшие на колею; в то же время, газ, поступающий в полость 26, поступает в пневматическую телескопическую трубку 25 и вызывает выталкивание пневматической телескопической трубки из боковых отверстий 24; при работе механизма движения 5, корпус 1 электровоза движется вперед; в это время система детектирования 4 активируется, чтобы детектировать окружающую среду в шахтном туннеле;
[0082] этап 2: использование лидарного датчика и радара миллиметрового диапазона для отслеживания информации по окружающей среде посредством динамического сканирования; автоматический контроллер движения в модуле обработки формирует изображение информации по окружающей среде, просканированной лидаром и радаром миллиметрового диапазона; когда отслеживание окружающей среды осуществляет лидарный датчик, сегментация облака точек выполняется на проходимой области и непроходимой области, чтобы планировать путь движения и детектировать препятствия; подземная колея угольной шахты отличается от наземной дороги; электровоз движется по фиксированной колее, и проблемы детектировать путь не существует; необходимо только детектировать препятствия рядом с колеей, чтобы разметить область безопасности для движения вперед; автоматический контроллер движения выполняет идентификацию колеи на динамически формируемом изображении, размечает область безопасности для движения вперед, то есть, область огибающей линии безопасности, и отправляет обратно полную информацию в контроллер электровоза в кабине 2, чтобы завершить построение; после завершения построения контроллер электровоза объединяет цель движения электровоза и переднюю огибающую линию области безопасности, чтобы осуществлять автоматическое движение.
[0083] При использовании изобретения, после запуска всего устройства работают оба приводных двигателя 15 в механизме 5 движения, и приводной двигатель 15 используется для вращения главного ведущего зубчатого колеса 18; главное ведущее зубчатое колесо 18 использует зацепляющееся зубчатое колесо 19 для вращения передаточного вала 21 в процессе вращения, и передаточный вал 21 использует ведущее зубчатое колесо 20 для вращения передаточного механизма 9 в процессе вращения, этим вращая колеса 7, что реализует перемещение положения механизма движения 5; механизм движения 5 обеспечивает перемещение всего устройства по шахтной колее вместе с перемещением положения; при вращении передаточного вала 21, поскольку оба конца передаточного вала 21 соединены с вентилятором 17, закрепленным в нижней части нижней рамы 6, и передаточный вал 21 соединен с внутренней частью вентилятора 17 и с лопастями вентилятора 17, вентилятор 17 работает от передаточного вала 21; поскольку вентилятор 17 соединен с промежуточной полостью 27 трубопроводом, вентилятор 17 может направлять газ в промежуточную полость 27 при работе; поскольку промежуточная полость 27 соединена с полостью 26, газ, поступающий в промежуточную полость 27, одновременно поступает в полость 26; газ, поступающий в промежуточную полость 27, выходит из воздушных отверстий 23, так что механизм движения может использовать газ, выходящий из колес, чтобы очищать колею при работе, поэтому можно удалять обломки, упавшие на колею; чтобы избежать неточного отображения информации, детектируемой системой детектирования 4, из-за тряски; в то же время, газ, поступающий в полость 26, поступает в пневматическую телескопическую трубку 25 и вызывает выталкивание пневматической телескопической трубки из боковых отверстий 24; поскольку боковые отверстия 24 расположены на боковой стенке обода, и поскольку колея имеет T-образную конструкцию, пневматическая телескопическая трубка 25, выталкиваемая из бокового отверстия 24, может доходить до положения ниже верхней части колеи, образуя защитную конструкцию, которая предотвращает сход колеса с рельса; при работе механизма движения 5, корпус 1 электровоза движется вперед; в это время система детектирования 4 активируется, чтобы детектировать окружающую среду в шахтном туннеле; лидарный датчик и радар миллиметрового диапазона используются для отслеживания информации по окружающей среде посредством динамического сканирования; автоматический контроллер движения в модуле обработки формирует изображение информации по окружающей среде, просканированной лидаром и радаром миллиметрового диапазона; автоматический контроллер движения выполняет идентификацию колеи на динамически формируемом изображении, размечает область безопасности для движения вперед, то есть, область огибающей линии безопасности, и отправляет обратно полную информацию в контроллер электровоза в кабине 2, чтобы завершить построение; после завершения построения контроллер электровоза объединяет цель движения электровоза и переднюю огибающую линию области безопасности, чтобы осуществлять автоматическое движение.
[0084] Предпочтительные варианты осуществления изобретения, раскрытые выше, представлены только для помощи в иллюстрации изобретения. Эти предпочтительные варианты осуществления не отражают все детали и не ограничивают изобретение только описанными вариантами осуществления. Очевидно, что в свете содержания настоящего описания возможны многие модификации и изменения. Эти варианты осуществления выбраны и конкретно изложены в описании изобретения, чтобы лучше объяснить принципы и варианты практического применения изобретения, так что специалисты в данной области техники смогут лучше понять и использовать изобретение. Изобретение ограничено только пунктами формулы изобретения, их полным объемом и эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автономного позиционирования для шахтного электровоза с взрывобезопасной аккумуляторной батареей | 2022 |
|
RU2810800C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЗИМНИХ АВТОДОРОГ | 2023 |
|
RU2809950C1 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2021 |
|
RU2824434C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЫЯВЛЕНИЯ НАЛИЧИЯ КОЛЕИ НА ТЕКУЩЕЙ МЕСТНОСТИ | 2020 |
|
RU2757037C1 |
| СПОСОБ И СЕРВЕР ДЛЯ ОБНОВЛЕНИЯ ПРЕДСТАВЛЕНИЯ КАРТЫ | 2024 |
|
RU2836391C1 |
| Устройство для охлаждения электродвигателя | 1982 |
|
SU1032547A2 |
| СКАНЕР ДЛЯ ЛИДАРНОЙ СИСТЕМЫ, ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ИСПОЛЬЗОВАНИЕМ СКАНЕРА | 2020 |
|
RU2781619C2 |
| Лидарная система и способ с когерентным детектированием | 2020 |
|
RU2792949C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СТЕПЕНИ УХУДШЕНИЯ ЛИДАРНЫХ ДАННЫХ | 2021 |
|
RU2826476C1 |
| ФОРМИРОВАНИЕ МОДЕЛИРОВАННЫХ ДАННЫХ ДАТЧИКОВ ДЛЯ ОБУЧЕНИЯ И ПРОВЕРКИ ДОСТОВЕРНОСТИ МОДЕЛЕЙ ОБНАРУЖЕНИЯ | 2017 |
|
RU2694154C2 |
Изобретение относится к определению положения и управлению положением транспортного средства. Способ управления движением шахтного электровоза заключается в том, что система детектирования на устройстве построения отслеживает информацию по окружающей среде посредством динамического сканирования, автоматический контроллер движения формирует изображение просканированной информации по окружающей среде, автоматический контроллер движения выполняет идентификацию колеи посредством динамического формирования изображения, размечает область безопасности для движения вперед и предоставляет полную информацию обратно в блок управления электровоза, блок управления электровоза выполняет автоматическое движение согласно цели электровоза и передней огибающей линии области безопасности. При этом электровоз содержит корпус, кабину и механизм движения. Система детектирования включает лидарный датчик, радар миллиметрового диапазона и модуль обработки. Корпус электровоза оснащен разбрасывателем песка и на наружной части кабины установлен буфер. Технический результат заключается в повышении стабильности и точности определения дефектов в процессе построения динамической огибающей линии электровозов. 3 з.п. ф-лы, 10 ил.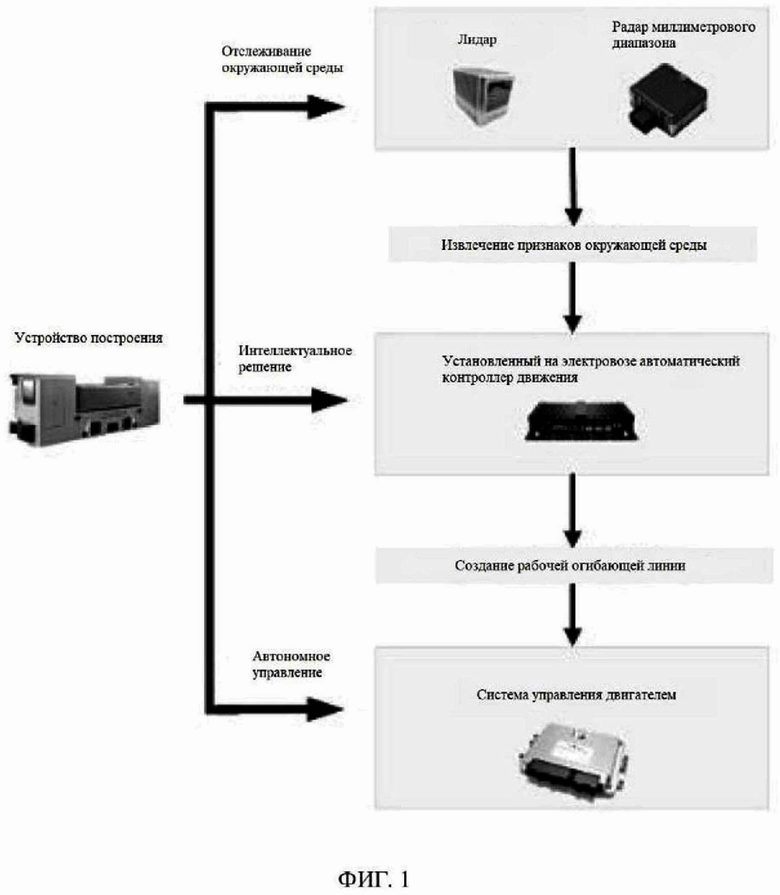
1. Способ управления движением шахтного электровоза, содержащего корпус (1) электровоза, кабину (2) и механизм движения (5), при этом кабина (2) закреплена на верхней части корпуса (1) электровоза, и корпус (1) электровоза снабжен источником (3) электропитания, система (4) детектирования закреплена на кабине (2), и механизм движения (5) закреплен на нижней части корпуса (1) электровоза, система (4) детектирования включает лидарный датчик, радар миллиметрового диапазона и модуль обработки, который электрически соединен с лидарным датчиком и радаром миллиметрового диапазона, корпус (1) электровоза оснащен разбрасывателем (1a) песка, и на наружной части кабины (2) установлен буфер (2a), причем способ управления включает следующие этапы:
этап S1: система (4) детектирования на устройстве построения отслеживает информацию по окружающей среде посредством динамического сканирования;
этап S2: автоматический контроллер движения формирует изображение просканированной информации по окружающей среде;
этап S3: автоматический контроллер движения выполняет идентификацию колеи посредством динамического формирования изображения, размечает область безопасности для движения вперед и предоставляет полную информацию обратно в блок управления электровоза;
этап S4: блок управления электровоза выполняет автоматическое движение согласно цели электровоза и передней огибающей линии области безопасности, при этом,
когда наземное транспортное средство на этапе S1 выполняет отслеживание окружающей среды посредством лидарного датчика, стабильная модель облака дорожных точек формируется путем наложения непрерывных многокадровых данных по облакам точек, на этом основании определяется положение колеи, и, в конечном счете, детектируются препятствия рядом с колеей; по результатам детектирования размечается область безопасности для движения вперед, и механизм соответствующей реакции реализуется следующим образом:
этап 1: создание стабильной модели дорожного пути:
в установленном на электровозе автоматическом контроллере движения эта модель основана на системе ПЗУ, и данные в реальном времени по облаку точек от лазерного датчика получают посредством функции библиотеки PCL облаков точек; данные облака точек имеют свой атрибут временной метки; система определяет последовательность непрерывных многокадровых данных по облакам точек посредством этого атрибута; частота сканирования лазерного датчика составляет 10 Гц, и изображение облака точек может быть сформировано за 100 мс; наложение непрерывных изображений многокадровых облаков точек осуществляется для наложения множества изображений облака точек согласно порядку данных по облакам точек, чтобы сформировать изображение более плотного облака точек; лазерный датчик снабжен встроенным инерциальным IMU-датчиком; IMU (инерциальный измерительный блок) предоставляет информацию по относительному позиционированию, и его функция заключается в измерении пройденного пути относительно объекта исходной точки; главными предоставляемыми параметрами являются x, y, z, roll, pitch и yaw; по этим параметрам можно моделировать трехмерное пространство, составленное из облаков точек;
посредством способов связи, таких как шина CAN, лазерный датчик получает скорость движения электровоза в реальном времени; по скорости электровоза в определенный момент времени можно определить относительное отношение положений между предыдущим кадром и следующим кадром изображения облака точек, скорректировать изображение облака точек следующего кадра и наложить его на изображение облака точек предыдущего кадра, и так далее, чтобы совместить многочисленные непрерывные изображения облаков точек для формирования изображения относительно стабильного и плотного облака точек;
после наложения данных по облаку точек модель восстанавливает изображение облака точек дорожного пути более реалистично; если при движении электровоза часто встречаются столкновения и тряска, создается виртуальное трехмерное пространство, и плоскость этого трехмерного пространства z = 0 определяется как фактическая поверхность земли; метод наименьших квадратов используется для подгонки данных по облаку точек в вертикальной плоскости из одного кадра изображения облака точек дорожного пути, за счет этого получают наклон линии регрессии относительно виртуальной плоскости и точку пересечения в вертикальном направлении; все данные по облаку точек этого кадра корректируются по полученному наклону и пересечению так, чтобы они совпадали с виртуальной плоскостью, и затем осуществляется наложение скорректированных данных этого кадра, чтобы в конечном итоге получить стабильную и четкую модель дорожного пути;
сначала задают уравнение линии регрессии:
где k - наклон и b – пересечение с осью y; поскольку линия поверхности земли не может быть перпендикулярной к оси x, уравнение линии пересечения можно использовать как уравнение линии регрессии; точку, задаваемую на вертикальной плоскости одного кадра изображения облака точек, можно выразить как:

оценивают сумму квадратичных ошибок от всех точек до линии:
применяя теорию экстремальных значений, можно видеть, что экстремальное значение может быть получено, когда первая производная уравнения ошибок равна 0, так что ее получают в отношении k и b, соответственно, и значения k и b определяют так, чтобы функция ошибки принимала минимальное значение; ее можно получить следующим образом:
после упорядочения можно получить:
где:  ,
,  ,
,  ,
,  ; после оценки значений k и b осуществляется их подстановка в уравнение регрессии, чтобы получить подогнанное уравнение прямой линии; по наклону k корректируется угол этого кадра изображения облака точек, чтобы уравнять его с виртуальной плоскостью; по пересечению b изображение облака точек транслируется так, чтобы оно располагалось на одном уровне с виртуальной плоскостью; каждый кадр изображения облака точек, полученный таким образом, будет находиться на одном уровне, чтобы достичь максимального совмещения, и этим получают изображение непрерывного, совмещенного из многих кадров облака точек стабильного и чистого дорожного пути;
; после оценки значений k и b осуществляется их подстановка в уравнение регрессии, чтобы получить подогнанное уравнение прямой линии; по наклону k корректируется угол этого кадра изображения облака точек, чтобы уравнять его с виртуальной плоскостью; по пересечению b изображение облака точек транслируется так, чтобы оно располагалось на одном уровне с виртуальной плоскостью; каждый кадр изображения облака точек, полученный таким образом, будет находиться на одном уровне, чтобы достичь максимального совмещения, и этим получают изображение непрерывного, совмещенного из многих кадров облака точек стабильного и чистого дорожного пути;
этап 2: создание модели извлечения признаков колеи
исходя из фактической ситуации, есть два заметных признака подземной колеи, одним является то, что высота колеи значительно выше, чем поверхность земли на обеих сторонах колеи, и разница в высоте составляет 10 см; другим является то, что интенсивность отражения колеи значительно ниже, чем интенсивность отражения поверхности земли;
по этим двум признакам создают модель, и создают два двухмерных массива, соответствующих фактической поверхности земли, чтобы нанести сетку на плоскость трехмерного пространства z = 0; значение одного из этих двухмерных массивов gridCell является значением z облака точек, соответствующим высоте фактического положения; значение другого двухмерного массива gridintensity является значением кривизны облака точек, соответствующим интенсивности отражения фактического положения; разрешение сетки устанавливают на 8 см;
количество данных по наложенным облакам точек огромное, и ограничение диапазона детектирования может значительно улучшить скорость движения; поскольку ширина колеи составляет 0,6 м и колея обычно находится в пределах определенного диапазона впереди колеи, ширину диапазона детектирования устанавливают на 0,8 м вокруг центра изображения облака точек, что соответствует 20 сеткам в центре ряда изображения; осуществляется анализ значений двух массивов из 20 сеток в центре ряда; положение сетки, соответствующее значению gridCell 0,1, считается положением колеи; соответствующее положение сетки там, где значение gridintensity массива значительно меньше, чем значение прилегающего массива, считается положением колеи; осуществляется интегрирование результатов анализа этих двух массивов, чтобы получить положение колеи ряда сетки; и т.д., когда электровоз находится в движении, положение колеи для каждого ряда в сетке вычисляется циклично, и, в конечном итоге, идентифицируется колея на изображении облака точек;
этап 3: идентификация препятствий
посредством модели извлечения признаков колеи, после того как колея идентифицирована правильно, осуществляется детектирование препятствий в определенном диапазоне рядом с колеей; вблизи сетки, соответствующей колее, размечается определенный диапазон и в нем осуществляется детектирование, имеет ли массив gridCell, соответствующий этому диапазону, значение z; если это значение z больше, чем ширина колеи и меньше, чем высота электровоза, то определяется препятствие; после этого расстояние между препятствием и электровозом оценивается по значению x препятствия, и электровоз может применить реакцию торможения посредством сообщения с системой управления двигателем, при этом
механизм (5) движения включает нижнюю раму (6), четыре колеса (7) и две боковых рамы (13); боковая рама (13) закреплена на наружных стенках на обеих сторонах нижней рамы (6); колеса (7) установлены в нижней части нижней рамы (6), и два соседних колеса (7) соединены вращающимся валом (8); передаточный механизм (9) установлен в середине двух вращающихся валов (8), и ведущее зубчатое колесо (20) находится в зацеплении с одной стороной двух передаточных механизмов (9); передаточный вал (21) пропущен через середину ведущего зубчатого колеса (20); оба конца передаточного вала (21) соединены с нагнетательным вентилятором (17), закрепленным в нижней части нижней рамы (6), и передаточный вал (21) соединен с внутренней частью вентилятора (17) и с лопастями внутри вентилятора (17); приводной двигатель (15), закрепленный в нижней части нижней рамы (6), расположен между двумя вентиляторами (17); выходной вал приводного двигателя (15) соединен с главным ведущим зубчатым колесом (18); главное ведущее зубчатое колесо (18) находится в зацеплении с зацепляющимся зубчатым колесом (19), установленным на передаточный вал (21).
2. Способ управления движением шахтного электровоза по п. 1, в котором колесо (7) включает ободья и ступицу; ободья расположены на наружных стенках обеих сторон ступицы; наружные стенки ступицы снабжены некоторым числом равномерно распределенных воздушных отверстий (23), и боковая стенка обода рядом со ступицей снабжена некоторым числом равномерно распределенных боковых отверстий (24); внутри ступица имеет промежуточную полость (27), и на одной стороне промежуточной полости (27) расположена полость (26), которая находится в ступице; полость (26) сообщается с промежуточной полостью (27), и промежуточная полость (27) сообщается с воздушными отверстиями (23); внутри каждого из боковых отверстий (24) установлена пневматическая телескопическая трубка (25), и эта пневматическая телескопическая трубка (25) сообщается с полостью (26); вентилятор (17) соединен с промежуточной полостью (27) трубопроводом.
3. Способ управления движением шахтного электровоза по п. 2, в котором верхняя часть каждой боковой рамы (13) зафиксирована несколькими амортизирующими пружинами (14), и верхние части амортизирующих пружин (14) соединены с нижней частью корпуса (1) электровоза; каждая боковая рама (13) снабжена боковой опорой (11), закрепленной на боковой стенке нижней рамы (6) на обеих сторонах, и боковая стенка каждой боковой опоры (11) снабжена соединительным стержнем (12); верхний конец соединительного стержня (12) закреплен на боковой стенке нижней рамы (6); внутри каждой боковой опоры (11) установлены несколько боковых пружин (10).
4. Способ управления движением шахтного электровоза по п. 3, в котором одна сторона каждого из колес (7) снабжена тормозным диском (16), установленным на вращающийся вал (8), и одна сторона каждого из тормозных дисков (16) снабжена пневматическим тормозом (22), который используется вместе с диском; пневматический тормоз (22) соединен с пневмоцилиндром в нижней части нижней рамы (6) трубопроводом.
| CN 111427348 A, 17.07.2020 | |||
| CN 103318189 A, 25.09.2013 | |||
| ТЕЛЕЖКА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2010 |
|
RU2438897C1 |
| CN 100450845 C, 14.01.2009 | |||
| CN 110531376 A, 03.12.2019 | |||
| Бортовая информационная система | 2020 |
|
RU2742960C1 |

