Изобретение относится к электронным системам железнодорожных транспортных средств и может быть использовано в бортовой информационно-вычислительной системе транспортного средства.
Известен блок индикации локомотивный для транспортного средства на комбинированном ходу, содержащий плату управления, взаимодействующую посредством САN-интерфейса с системой безопасности, модуль светодиодной индикации и лицевую панель, соединенную с модулем светодиодной индикации и выполненную с возможностью отображения показаний светофора, фактической, целевой и допустимой скоростей в виде шкалы и в цифровом виде и с возможностью оповещения машиниста об изменении наиболее важных с точки зрения безопасности движения параметров световым и звуковым сигналами, модуль светодиодной индикации состоит из платы индикации подключаемой к плате управления, платы светофоров и модуля индикации скорости, соединенных с платой индикации и выполненных с возможностью отображения значений на лицевой панели; в блок введен модуль фильтров и источника питания, одним входом/выходом подключенный к плате управления, а другим к рукояткам бдительности машиниста, звуковой прибор подключают к плате управления с возможностью выхода звука через отверстия на задней панели блока, к плате управления подключают внешние устройства - кассету регистрации и блок ввода локомотивный (RU146494, B61L25/02, 10.10.14).
К недостаткам известного устройства следует отнести ограниченное количество ответственной информации с выводом на дисплей в виде шкалы и в цифровом виде, который находится в приборной панели и не позволяет осуществлять одновременное слежение за дорожной ситуацией, что снижает безопасность при движении специального средства передвижения. Плата управления не осуществляет диагностику и управление дисплеем и регулировку резкости изображения.
В качестве прототипа выбрано устройство локомотивной индикации, содержащее модуль кодирования и индикации, выполненный с возможностью ввода в него данных для безопасного ведения поезда и соединенный с модулем управления, кассету регистрации, соединенную с модулем кодирования и регистрации, соединенным с модулем управления, посредством системного интерфейса типа CAN взаимодействующим с локомотивными системами безопасности, и локомотивное табло индикации, соединенное с модулем кодирования и индикации и выполненное с возможностью отображения показания светофора, фактической, целевой и допустимой скорости движения поезда, направления движения, типа цели и расстояния до нее (RU2265539, B61L 3/12, 10.12.05).
Недостатками устройства является его относительная сложность, т.к. содержит значительное число аналоговых устройств, использование низкоскоростных шин RS-232, RS-485 и магистрали CAN-Bus, показание для скорости выводится в виде шкалы, остальные показания в цифровом виде достаточно небольшого размера. В нем нет средств определения препятствий и может реагировать только на замыкание рельсовых цепей. При необходимости внимательного изучения показаний прибора машинист полностью отвлекается от дороги, что понижает безопасность управления движением поезда. Кроме того, устройство не отображает такие показания как профиль пути, целостность состава, уровень сигнала канала связи, режим движения (разгон, выбег, торможение), наличие препятствия на пути с его отображением, наличие стрелок и их состояние, состояние машиниста.
Технический результат изобретения заключается в расширении функциональных возможностей бортовой информационной системы с обеспечением удобства ее использования при управлении транспортным средством, за счет отображения на лобовом стекле тягового подвижного состава важной информации, как о состоянии внутренних параметров транспортного средства, так и о внешней ситуации перед движущимся транспортным средством.
Технический результат достигается тем, что в бортовую информационную систему, содержащую подключенные к высокоскоростному CAN-Ethernet (CAN-E) - интерфейсу блоки локомотивного устройства безопасности, блок управления устройством визуализации и блок обработки информации с подключенным к его выходу устройством визуализации, согласно изобретению введены блок датчиков технического зрения, состоящий из модуля первичной обработки данных, к которому подключены, по крайней мере, одна видеокамера, один лидар и один тепловизор, и вычислительный блок, состоящий из вычислителя с подключенными к нему модулем комплексирования данных, нейросетью и блоком памяти, вход вычислителя соединен с выходом модуля первичной обработки данных, а его выход через блок принятия решений подключен к высокоскоростному CAN-E - интерфейсу, при этом блок управления устройством визуализации состоит из подключенных к высокоскоростному CAN-E - интерфейсу датчика освещенности, модуля состояния устройства визуализации с индикатором, датчика корректировки изображения и модуля выбора информации, а устройство визуализации выполнено в виде средства, обеспечивающего формирование визуальной информации на лобовом стекле кабины машиниста.
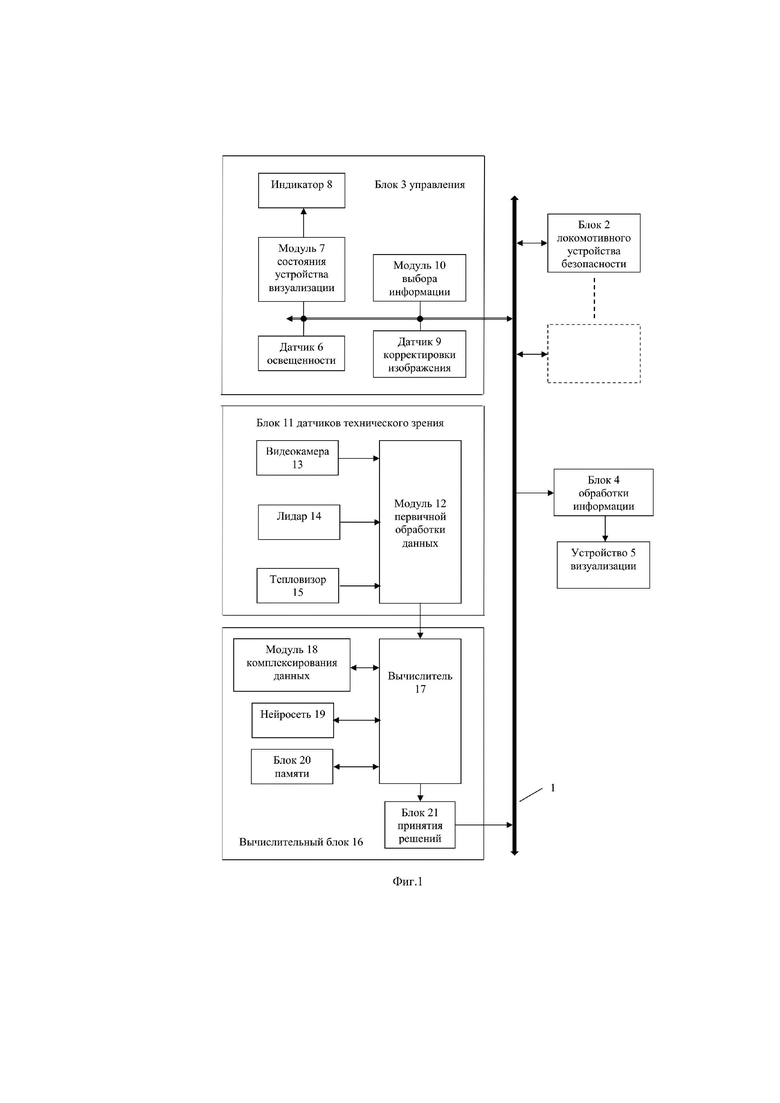
На чертеже (фиг.1) приведена функциональная схема бортовой информационной системы.
Бортовая информационная система содержит подключенные к высокоскоростному CAN-E – интерфейсу 1 блоки 2 локомотивного устройства безопасности, в частности, включающие средство контроля безопасности движения, средство диагностики и выявления неисправности, средство контроля бодрствования машиниста, датчики пути и скорости движения, устройство спутниковой навигации и электронный карты маршрутов, датчики давления тормозной магистрали, приемо-передатчик цифрового канала радиосвязи и систему передачи информации от электрической централизации, путевых и маневровых светофоров, блок 3 управления устройством визуализации и блок 4 обработки информации с подключенным к его выходу устройством 5 визуализации, которое выполнено в виде средства, обеспечивающего формирование визуальной информации на лобовом стекле кабины машиниста. Блок 3 управления устройством визуализации состоит из подключенных к высокоскоростному CAN-E - интерфейсу датчика 6 освещенности, модуля 7 состояния устройства визуализации с индикатором 8, датчика 9 корректировки изображения и модуля 10 выбора информации. Блок 11 датчиков технического зрения состоит из модуля 12 первичной обработки данных, к которому подключены, по крайней мере, одна видеокамера 13, один лидар 14 и один тепловизор 15. Вычислительный блок 16 состоит из вычислителя 17 с подключенными к нему модулем 18 комплексирования данных, нейросетью 19 и блоком 20 памяти, вход вычислителя 17 соединен с выходом модуля 12 первичной обработки данных, выход вычислителя 17 через блок 21 принятия решений подключен к высокоскоростному CAN-E – интерфейсу.
Бортовая информационная система работает следующим образом.
При начале движения локомотива через высокоскоростной CAN-E – интерфейс 1 устройство 5 визуализации включается и контролируется блоком 3 управления устройством визуализации, которое диагностирует и управляет устройством 5 визуализации. Через блок 3 управления устройством визуализации возможно ручное включение/ выключение устройства 5 визуализации, коррекция яркости изображения, а также настройка визуализации и выбор той информации, которая необходима в данный момент машинисту. Блок 3 управления устройством визуализации имеет в своем составе датчик 6 освещенности, который осуществляет автоматическую коррекцию яркости изображения, но одновременно позволяет ручную настройку яркости в зависимости от желания машиниста, датчик 9 корректировки изображения, который контролирует четкость отображения информации устройством 5 визуализации, которое формирует визуальную информацию на лобовом стекле кабины машиниста, модуль 7 состояния устройства визуализации, осуществляющий диагностику состояния устройства 5 визуализации и в случае обнаружения неисправности выводит сообщение на индикатор 8. Модуль 10 выбора информации позволяет в ручном режиме осуществлять выбор данных и той информации, которая необходима в данный момент машинисту или в автоматическом режиме выводить информацию об аварийном режиме. При срабатывании аварийных режимов систем локомотива или при определении препятствия от блока 11 датчиков технического зрения блок 3 управления по высокоскоростному CAN- E интерфейсу 1 выводит изображение на устройство 5 визуализации в режиме мигания в красном цвете и одновременно выдает сигнал на звуковое оповещение машиниста для привлечения его внимания. В случае реагирования машиниста на аварийную ситуацию, блок 3 управления вначале отключает звуковой сигнал, а после устранения опасной ситуации переводит режим визуализации ответственной информации в состояние, которое было до срабатывания аварийного режима. В качестве средства, обеспечивающего формирование визуальной информации на лобовом стекле кабины машиниста, возможно использование средств индикации на лобовом стекле для отображения визуальной информации и ее калибровки известных, например, из патентов RU2705742, RU2704333. Средство отображения информации должно соответствовать необходимому и достаточному объему и качеству информации для функционального и психофизического состояния машиниста, эргономическим требованиям к рабочему месту машиниста с целью передачи достоверной визуальной и голосовой информации для исключения его загруженности и отвлечения от процесса управления локомотивом, а при повышении уровня автономности до GoA3 контроля за управлением. Отображаемая на лобовом стекле информация поступает от следующих источников: блока 11 датчиков технического зрения, блоков 2 локомотивного устройства безопасности, представляющих собой средство контроля безопасности движения, средство диагностики и выявления неисправности, средство контроля бодрствования машиниста, датчики пути и скорости движения, устройство спутниковой навигации и электронный карты маршрутов, датчики давления тормозной магистрали, приемо-передатчик цифрового канала радиосвязи и систему передачи информации от электрической централизации, путевых и маневровых светофоров и т.д.
Информация о ситуации перед движущимся транспортным средством, например, о нахождении препятствия на пути и/или объектах инфраструктуры вдоль пути в габарите транспортного средства поступает от блока 11 датчиков технического зрения, состоящего из одной или нескольких видеокамер 13, одного или нескольких лидаров 14 и одного или нескольких тепловизоров 15, сигналы которых обрабатываются в модуле 12 первичной обработки данных и передаются на вход вычислителя 17 вычислительного блока 16, на выходе которого формируется сигнал либо о наличии препятствия и тогда информация об идентифицированном объекте через блок 21 принятия решений передается в блок 4 обработки информации, с выхода которого обработанная информация с помощью устройства 5 визуализации визуализируется на лобовом стекле кабины машиниста и сопровождается звуковым сигналом для машиниста, либо формируется сигнал о наличии текущих объектов инфраструктуры, которые являются частью цифровой карты и могут отображаться как визуализация 3D объектов вдоль пути без подачи дополнительных сигналов машинисту.
Блок 11 датчиков технического зрения обеспечивает определение и идентификацию объектов-препятствий и рельсовой колеи для формирования виртуального габарита приближения строений и препятствий, путем обнаружения пересечений с зоной виртуального габарита приближения строений, и других объектов, сформированных вычислительным блоком 16 на основе комплексирования данных с помощью модуля 18 комплексирования данных, нейросети 19 и блока 20 памяти, где находятся шаблоны объектов и цифровая карта рельсовых путей. Важное значение имеет также определение места транспортного средства в трехмерном пространстве относительно других объектов, обнаруженных блоком 11 датчиков технического зрения, с отображением полученной информации устройством 5 визуализации. Алгоритм функционирования блока 11 следующий: при включении бортовой системы первичные данные от откалиброванных датчиков (одной или нескольких видеокамер 13, одного или нескольких лидаров 14, одного или нескольких тепловизоров 15) в виде массива данных отличительного для каждого вида датчиков передаются в модуль 12 первичной обработки данных, который с помощью программного обеспечения и методов и алгоритмов по улучшению и восстановлению изображений производит предварительную обработку данных, производит фильтрацию от шумов, реконструирует и сегментирует изображение для получения объектов датчиков и передает их в вычислительный блок 16, где с помощью вычислителя 17, модуля 18 комплексирования данных, посредством высокоуровневых алгоритмов комплексирования данных, глубокой нейросети 19 формирует общие кластеры, позволяющие определить глобальный объект. Далее, полученный глобальный объект сравнивается с объектами в блоке 20 памяти нейросети, обученной оператором. При совпадении с заданной вероятностью с образцом на выходе с вычислителя 17 формирует готовый образ объекта. В случае определения и идентификации объекта, который находится в зоне виртуального габарита поезда и приближения объекта, вычислитель 17 передает сигнал на блок 21 принятия решения, который формирует управляющий сигнал, передаваемый на блок 3 управления устройством визуализации, который в свою очередь формирует аварийный сигнал на устройстве 5 визуализации, описанный выше.
На устройстве 5 визуализации отображается информация от блоков 2 локомотивного устройства безопасности.
Средство диагностики и выявления неисправности производит постоянную диагностику оборудования и позволяет выявлять неисправности тягового и вспомогательного оборудования локомотива, железнодорожного пути и устройств интервального регулирования. В случае обнаружения неисправности оно выдает предупредительный сигнал на вход блока 4 обработки информации с его дальнейшим отображением на лобовом стекле кабины машиниста с конкретным видом пиктограммы о неисправной системе (оборудования) с подачей звукового сигнала машинисту.
Средство контроля бодрствования машиниста определяет уровень бодрствования машиниста и в случае понижения этого уровня до предкритической величины перед инициацией служебного торможения (например, за 1 минуту) подает сигнал на вход блока 4 обработки информации с его дальнейшим отображением на лобовом стекле кабины машиниста с подачей звукового сигнала машинисту с максимально возможной громкостью, что позволит предотвратить служебное торможение.
Информация о скорости и положении пути поступает от датчиков пути и скорости движения, которая в свою очередь сравнивается с информацией в подсистеме контроля безопасности движения, и в случае превышения скорости на данном участке передает ее в блок 4 обработки информации для отображения на лобовом стекле кабины машиниста красным цветом текущую скорость движения и дополнительно информирует об этом звуковым сигналом машиниста.
Также информация от датчиков пути и скорости движения поступает в устройство спутниковой навигации и электронный карты маршрутов (на чертеже не показано), где сравнивается пройденный путь с момента начала движения и производится координатная привязка к данным электронной карты и определяется текущая координата, которая отображается на устройстве 5 визуализации через сигнал, проходящий по высокоскоростному CAN-E - интерфейсу 1 на вход блока 4 обработки информации с визуализацией в виде цифровой информации или в виде стрелки на карте местности на лобовом стекле кабины машиниста.
Информация от датчиков давления тормозной магистрали в случае определения пониженного давления поступает на вход блока 4 обработки информации с его дальнейшим отображением пиктограммы на лобовом стекле кабины машиниста и подачей звукового сигнала машинисту, для привлечения внимания к данной проблеме.
Приемо-передатчик цифрового канала радиосвязи определяет уровень сигнала в каналах приема и передачи радиосигнала и формирует сигнал на вход блока 4 обработки информации с его дальнейшим отображением на лобовом стекле кабины машиниста в виде пиктограммы с максимальным количеством уровня сигнала (5 элементов пиктограммы для максимального уровня сигнала, 1 элемент – для минимального уровня сигнала, 0 элементов- отсутствие сигнала).
Система передачи информации от электрической централизации, путевых и маневровых светофоров позволяет определить неисправность централизации, а также значение сигнала от путевых и маневровых светофоров. Данная информация в виде сигнала поступает на вход блока 4 обработки информации с его дальнейшим отображением на лобовом стекле кабины машиниста с конкретным видом пиктограммы о сигнале светофора (зеленый цвет- информирование на стекле без звукового сигнала, желтый цвет – с кратким звуковым сигналом, красный цвет с продолжительным звуковым сигналом) для информирования машиниста.
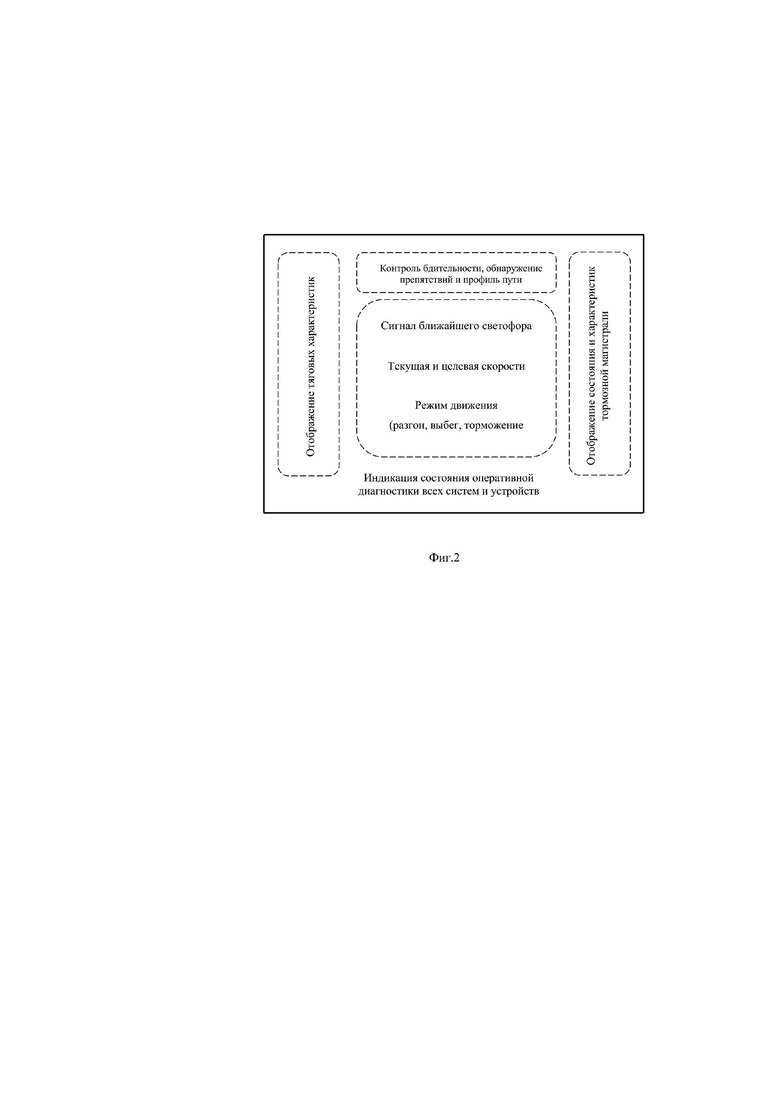
Шаблон визуализации ответственной информации на лобовом стекле кабины машиниста показан на фиг.2. Он содержит области (границы) отображения данных на HUD. Условное деление области визуализации информации следующая:
• Левая часть — это тяговые характеристики;
• Центральная часть – сигнал ближайшего светофора, текущая и целевые скорости, режим движения (разгон, выбег, торможение);
• Правая часть – тормозная магистраль и ее характеристики (расчетный тормозной путь);
• Верхняя часть – контроль бдительности, обнаружение препятствий и профиль пути;
• Нижняя часть – оперативная диагностика всех систем и устройств тягового подвижного состава.
Предлагаемая бортовая информационная система ответственной информации применима для помощи машинисту и создает комфортные условия для управления движением поезда и слежения о текущем состоянии, как самого локомотива, так и информационной ситуации вокруг него с минимизацией отвлечения от дорожной обстановки. При движении локомотива устройство представляет важную информацию путем проецирования её на лобовое стекло и позволяет считывать необходимые данные быстро и без перемещения зрения водителя (машиниста), чем сокращает время для принятия решения и правильной оценки управляющего воздействия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бортовая система технического зрения рельсового транспортного средства | 2023 |
|
RU2804565C1 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2013 |
|
RU2554912C2 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| Устройство для управления движением поезда | 2021 |
|
RU2765515C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| Устройство бортовой аппаратуры автоматической локомотивной сигнализации | 2017 |
|
RU2653667C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2508218C1 |
| УСТРОЙСТВО ЛОКОМОТИВНОЙ ИНДИКАЦИИ | 2004 |
|
RU2265539C2 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ СПЕЦИАЛЬНОГО САМОХОДНОГО ПОДВИЖНОГО СОСТАВА НА КОМБИНИРОВАННОМ ХОДУ (ССПС КХ) | 2013 |
|
RU2544044C2 |
Изобретение относится к средствам информирования машинистов поездов. Система содержит подключенные к высокоскоростному CAN-E – интерфейсу блоки локомотивного устройства безопасности, в частности, включающие средство контроля безопасности движения, средство диагностики и выявления неисправности, средство контроля бодрствования машиниста, датчики пути и скорости движения, устройство спутниковой навигации и электронный карты маршрутов, датчики давления тормозной магистрали, приемопередатчик цифрового канала радиосвязи и систему передачи информации от электрической централизации, путевых и маневровых светофоров, блок управления устройством визуализации и блок обработки информации с подключенным к его выходу устройством визуализации, которое выполнено в виде средства, обеспечивающего формирование визуальной информации на лобовом стекле кабины машиниста. Блок управления устройством визуализации состоит из подключенных к высокоскоростному CAN-E - интерфейсу датчика освещенности, модуля состояния устройства визуализации с индикатором, датчика корректировки изображения и модуля выбора информации. Блок датчиков технического зрения состоит из модуля первичной обработки данных, к которому подключены по крайней мере одна видеокамера, один лидар и один тепловизор. Вычислительный блок состоит из вычислителя с подключенными к нему модулем комплексирования данных, нейросетью и блоком памяти, вход вычислителя соединен с выходом модуля первичной обработки данных, выход вычислителя через блок принятия решений подключен к высокоскоростному CAN-E – интерфейсу. Достигается расширение функциональных возможностей бортовой информационной системы информирования. 2 ил.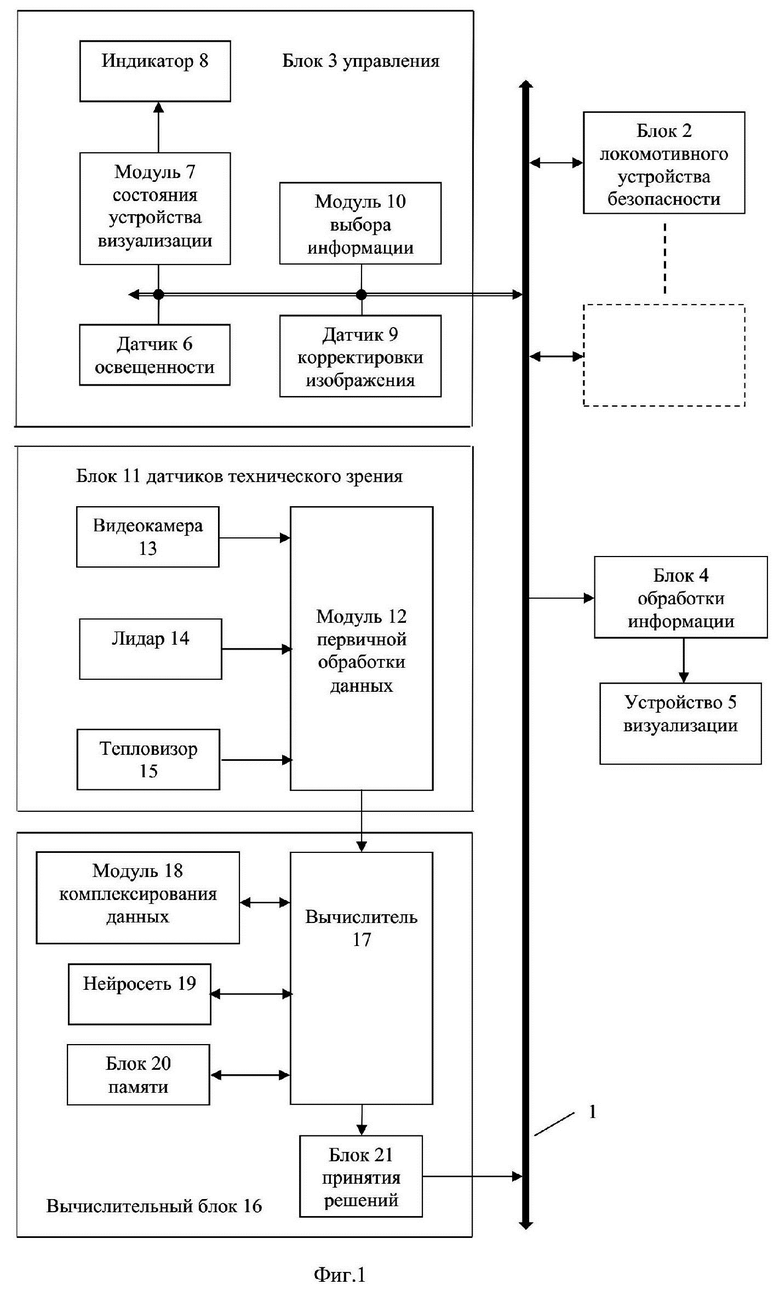
Бортовая информационная система, содержащая подключенные к высокоскоростному CAN-E - интерфейсу блоки локомотивного устройства безопасности, блок управления устройством визуализации и блок обработки информации с подключенным к его выходу устройством визуализации, отличающаяся тем, что в нее введены блок датчиков технического зрения, состоящий из модуля первичной обработки данных, к которому подключены по крайней мере одна видеокамера, один лидар и один тепловизор, и вычислительный блок, состоящий из вычислителя с подключенными к нему модулем комплексирования данных, нейросетью и блоком памяти, вход вычислителя соединен с выходом модуля первичной обработки данных, а его выход через блок принятия решений подключен к высокоскоростному CAN-E - интерфейсу, при этом блок управления устройством визуализации состоит из подключенных к высокоскоростному CAN-E - интерфейсу датчика освещенности, модуля состояния устройства визуализации с индикатором, датчика корректировки изображения и модуля выбора информации, а устройство визуализации выполнено в виде средства, обеспечивающего формирование визуальной информации на лобовом стекле кабины машиниста.
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2508218C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ УНИФИЦИРОВАННОЕ (КЛУБ-У) | 2003 |
|
RU2248899C1 |
| УСТРОЙСТВО ЛОКОМОТИВНОЙ ИНДИКАЦИИ | 2004 |
|
RU2265539C2 |
| СПОСОБ, УСТРОЙСТВО И ЖЕЛЕЗНОДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО, В ЧАСТНОСТИ РЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО, ДЛЯ РАСПОЗНАВАНИЯ ПРЕПЯТСТВИЙ В ЖЕЛЕЗНОДОРОЖНОМ СООБЩЕНИИ, В ЧАСТНОСТИ В РЕЛЬСОВОМ СООБЩЕНИИ | 2017 |
|
RU2719499C1 |
| EP 2993105 A2, 09.03.2016. | |||

