Изобретение относится к области геофизических изысканий в инженерной геологии, геологоразведке, экологических изысканиях, выполняемых с целью выявления и локализации геологических структур, подповерхностных объектов природного и техногенного происхождения.
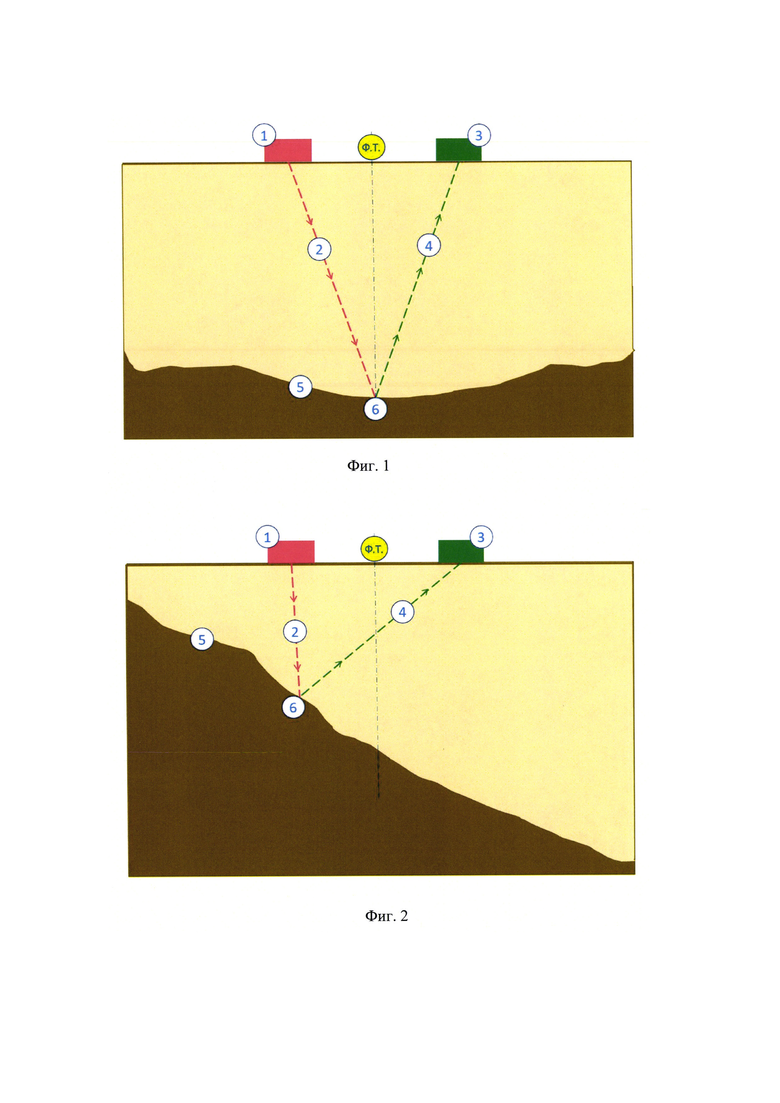
Физический принцип геофизических исследований подповерхностного пространства, осуществляемых с помощью электромагнитных волн (георадиолокация) и акустических волн (сейсморазведка), основан на известном явлении отражения сигнала волновой природы от разделов сред или аномалий в подповерхностном пространстве. При георадиолокационных исследованиях регистрируются отражения электромагнитных волн от разделов сред, имеющих различные электрофизические свойства, а при сейсморазведке регистрируются отражения акустических волн от разделов сред, имеющих разную плотность (Фиг. 1).
Отражения зондирующего сигнала идентифицируются по локальным максимумам амплитуды мощности или напряжения сигналов, регистрируемых приемным устройством в течение предварительно установленного временного интервала после генерации зондирующего сигнала.
Априорные данные по скорости распространения в различных средах применяемого в исследованиях сигнала волновой природы позволяют вычислить по Формуле 1 расстояние от устройства, генерирующего зондирующий сигнал, до точки его отражения в подповерхностном пространстве.
На основе получаемых таким образом исходных данных выстраивается геологический разрез обследуемого участка, локализуются подповерхностные аномалии и объекты.
Известен способ дискретной георадиолокации с регистрацией отраженных сигналов в отдельных точках на непрерывном георадарном профиле (RU 2248585, RU 2205424), лежащий в основе конструкции георадара торговой марки «ЛОЗА» ООО «ВНИИСМИ». Также известны аналогичные способы (RU 2244322 и RU 365698) георадиолокации, применяемые в георадрарах марки «ГРОТ» ООО «Таймер».
Недостатком всех указанных способов, а также иных известных способов геофизических изысканий с применением зондирующих сигналов волновой природы является высокая зашумленность регистрируемых отражений зондирующего сигнала, препятствующая достоверной локализации точек его отражения в подповерхностном пространстве из-за многочисленных отражений зондирующего сигнала от различных точек одного и того же раздела сред в подповерхностном пространстве. Несмотря на применение алгоритмических фильтров при обработке полученных данных измерений, такие шумы и отражения существенно затрудняют вычленение информационно значимых отражений, позволяющих достоверно локализовать точки отражений зондирующих сигналов. При крутопадающих в подповерхностном пространстве разделах сред за информационно значимые могут быть приняты отражения зондирующего сигнала, которые отражаются от точек, расположенных вне оси между генерирующим и приемным устройствами перпендикулярной плоскости поверхности обследуемого геологического пространства, что существенно снижает достоверность получаемых данных (Фиг. 2).
Также известен способ по патенту RU 2490671, согласно которому предлагается выполнение георадиолокационного зондирования с применением пары передатчик-приемник, которая в процессе выполнения исследования вращается на поверхности исследуемого подповерхностного пространства вокруг одной точки и снимает показания по азимутам. Получаемые по этой схеме данные усредняются и среднее значение принимается, как отраженное от точки, лежащей на оси вращения пары передатчик-приемник. Однако, при указанном усреднении также учитываются данные отражений от точек в подповерхностном пространстве, которые лежат вне указанной оси вращения пары приемник-передатчик. Это обстоятельство не позволяет, достоверно локализовать точку фактического отражения зондирующего сигнала.
Технический результат, на достижение которого направлено предлагаемое изобретение, заключается в повышении эффективности геофизических изысканий, проводимых с помощью зондирующих сигналов волновой природы.
Указанный технический результат достигается двумя вариантами способа зондирования подповерхностного пространства с помощью сигналов волновой природы. Упомянутые варианты способа представляют собой технические решения, связанные между собой настолько, что образуют единый общий изобретательский замысел.
Согласно первому варианту заявляемого способа осуществляют генерирование зондирующего сигнала, регистрацию сигнала, отраженного от подповерхностного раздела сред, последующую обработку результатов изысканий и определение выборкой параметров для расчета положения точки отражения зондирующего сигнала от раздела сред. При осуществлении данного варианта способа используют четыре устройства, одно из которых - передающее устройство, генерирующее зондирующий сигнал, а три других - приемные устройства, регистрирующие сигнал, отраженный от подповерхностного раздела сред. Все устройства размещают в вершинах условно формируемого на поверхности или над поверхностью исследуемого геологического пространства прямоугольника с центром в обследуемой физической точке. Расстояние до точки раздела сред от поверхности, с которой ведут исследования, определяют по отраженным сигналам, принятым всеми тремя приемными устройствами одновременно, как высоту условной прямой пирамиды, основанием которой является прямоугольник, условно сформированный передающим и тремя приемными устройствами, размещенными по его вершинам (в точках регистрации отражений зондирующего сигнала). При расчете высоты этой пирамиды, длину каждого из ребер этой пирамиды определяют как половину произведения скорости распространения используемого зондирующего сигнала и временного интервала между временем генерации зондирующего сигнала и временем регистрации его отражения от раздела сред в подповерхностном пространстве каждым из трех принимающих его отражение устройств.
При обработке полученных результатов измерений во время проведения геофизических изысканий устанавливают (определяют) временной интервал, в течение которого время регистрации отражений зондирующего сигнала на всех трех приемных устройствах, условно принимают одновременным, при этом для расчета положения точки отражения зондирующего сигнала от подповерхностных разделов сред используют усредненный результат измерений, выполненных всеми тремя приемными устройствами.
В каждой физической точке выполнения зондирования может генерироваться несколько последовательных импульсов зондирующего сигнала, при этом отбраковывают результаты, не удовлетворяющие условию одновременной регистрации отраженного сигнала всеми тремя приемными устройствами, а остальные результаты усредняют.
Также в каждой физической точке выполнения зондирования может генерироваться несколько последовательных импульсов зондирующего сигнала, отличающихся по физическим характеристикам, в том числе по мощности, по частоте, по продолжительности, по форме генерируемого импульса.
Согласно второму варианту заявляемого способа осуществляют генерирование зондирующего сигнала, регистрацию сигнала, отраженного от подповерхностного раздела сред, последующую обработку результатов изысканий и определение параметров для расчета положения точки отражения зондирующего сигнала от раздела сред. При осуществлении данного варианта способа используют одно передающее и одно приемное устройство. При этом генерирующее зондирующий сигнал передающее устройство устанавливают в одной из вершин прямоугольника, условно формируемого на поверхности или над поверхностью исследуемого геологического пространства, а одно приемное устройство регистрирующее сигнал, отраженный от подповерхностного раздела сред, поочередно устанавливают в каждой из других вершин этого прямоугольника, при этом генерацию зондирующего сигнала осуществляют каждый раз после установки приемного устройства в очередной вершине прямоугольника. Расстояние до точки раздела сред от поверхности, с которой ведут исследования, определяют по отраженным сигналам, принятым на каждой из трех позиций приемного устройства (в точках регистрации отражений зондирующего сигнала), как высоту условной прямой пирамиды, основанием которой является условно сформированный прямоугольник с позициями для передающего и приемного устройств по его вершинам. При расчете высоты пирамиды, длину каждого из ребер этой пирамиды определяют как половину произведения скорости распространения используемого зондирующего сигнала и временного интервала, условно равного для каждой из трех позиций приемного устройства, между временем генерации зондирующего сигнала и временем регистрации его отражения от раздела сред в подповерхностном пространстве.
При обработке полученных результатов измерений во время проведения геофизических изысканий устанавливают временной интервал, в течение которого время регистрации отражений зондирующего сигнала на каждой из трех позиций приемного устройства условно принимают одновременным, при этом для расчета положения точки отражения зондирующего сигнала от подповерхностных разделов сред, результат измерений, выполненных на всех трех позициях приемного устройства, усредняют.
В каждой физической точке выполнения зондирования может генерироваться несколько импульсов зондирующего сигнала, при этом отбраковывают результаты, не удовлетворяющие условию одновременного приема отраженного сигнала на каждой из трех позиций приемного устройства, а остальные результаты усредняют.
Также в каждой физической точке выполнения зондирования может генерироваться несколько последовательных импульсов зондирующего сигнала, отличающихся по физическим характеристикам, в том числе по мощности, по частоте, по продолжительности, по форме генерируемого импульса.
В обоих вариантах осуществления заявляемого способа измерения с помощью комплекта устройств (одно передающее и три приемных устройства или одно передающее и одно приемное устройство) поочередно производят в каждой физической точке выполнения зондирования.
Автоматизированная обработка полученных результатов измерений может осуществляться в режиме реального времени непосредственно на месте проведения испытаний или же в режиме камеральной обработки после получения всех результатов измерений по обследуемому геологическому пространству.
Заявленное техническое решение (варианты) проиллюстрировано графическими материалами, где:
на Фиг. 1 представлена иллюстрация физического принципа геофизических исследований подповерхностного пространства, осуществляемых с помощью зондирующих сигналов волновой природы;
на Фиг. 2 - то же при крутопадающих в подповерхностном пространстве разделах
сред;
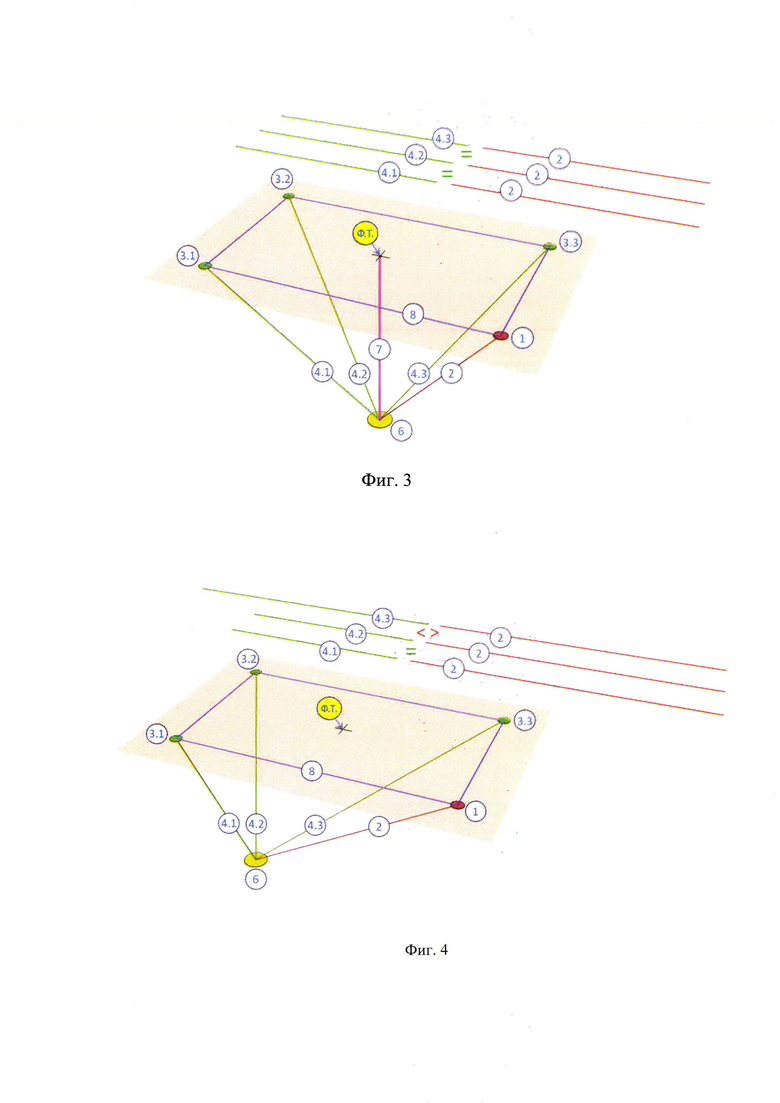
на Фиг. 3 - условно изображены сигналы, принимаемые к дальнейшей обработке (отражения зондирующего сигнала, принятые во всех трех точках регистрации его отражений через одинаковые промежутки времени после его генерации;
на Фиг. 4 - условно изображены сигналы, данные о которых игнорируются в процессе обработки, т.е. те, которые не образуют между собой тройку равных по времени их регистрации на позициях размещения приемных устройств.
Позиции, представленные на Фиг. 1-4:
1 - устройство, генерирующее зондирующий сигнал
2 - зондирующий сигнал
3 - устройство, регистрирующее отражение зондирующего сигнала (приемное устройство)
3.1.,3.2 и 3.3. - Точки регистрации отражений зондирующего сигнала
4 - отраженный сигнал
4.1. - Отраженный сигнал, принимаемый в точке регистрации отражений зондирующего сигнала 3.1.
4.2. - Отраженный сигнал, принимаемый в точке регистрации отражений зондирующего сигнала 3.2.
4.3. - Отраженный сигнал, принимаемый в точке регистрации отражений зондирующего сигнала 3.3.
5 - раздел сред
6 - точка отражения зондирующего сигнала
7 - расстояние от поверхности исследуемого геологического пространства до точки отражения зондирующего сигнала
8 - прямоугольник основания прямой пирамиды, образованный устройством, генерирующим зондирующий сигнал и точками регистрации его отражений
ф.т. - физическая точка.
Обработка полученных данных изысканий осуществляется следующим образом: Из массива данных, получаемых при регистрации отражений зондирующего сигнала из подповерхностного пространства в каждой физической точке выполнения зондирования, вычленяются и принимаются к дальнейшей обработке только группы отражений зондирующего сигнала, принятые во всех трех точках регистрации его отражений через одинаковые промежутки времени после его генерации. Такие отражения соответствуют отражениям зондирующего сигнала от точек в подповерхностном пространстве, расположенных в вершинах воображаемых прямых пирамид, имеющих основания в виде прямоугольника, образуемого точкой размещения передающего устройства, генерирующего зондирующий сигнал, и тремя точками регистрации его отражений (место расположения приемных устройств) (Фиг. 3), в соответствии с известным свойством прямой пирамиды, согласно которому суммы любых двух ее боковых ребер равны между собой. Длина ребер такой пирамиды вычисляется по формуле 1 с учетом скорости распространения применяемого волнового сигнала в исследуемой геологической среде, а высота этой пирамиды представляет собой расстояние от плоскости, на которой расположены генерирующее зондирующий сигнал передающее устройство и три точки регистрации его отражений, до раздела сред в подповерхностном пространстве, от которого произошли зарегистрированные отражения зондирующего сигнала.
В процессе обработки полученных данных игнорируются все отраженные сигналы, принятые в каждой точке регистрации его отражений (в месте размещения приемных устройств), в случае если этим отраженным сигналам не будет найдена пара других отраженных сигналов с таким же временем их регистрации в двух других точках регистрации отражений зондирующего сигнала. Такие отраженные сигналы, которые не образуют между собой тройку равных по времени их регистрации в точках регистрации отражений зондирующего сигнала (на позициях размещения приемных устройств), заведомо отражены от точек в стороне от линии, перпендикулярной плоскости условного прямоугольника и проведенной из центра этого прямоугольника (Фиг. 4). Таким образом, предлагаемый способ позволяет получить минимально зашумленные результирующие данные, выделить из всего массива отражений зондирующего сигнала в основном информационно значимые отражения от точек в подповерхностном пространстве и достоверно определить расстояния от поверхности обследуемого участка до разделов сред и выявляемых аномалий.
Описание варианта применения способа зондирования подповерхностного пространства с помощью сигналов волновой природы, представляющих собой, в частности, электромагнитные или акустические импульсы
Полевые работы:
На поверхности обследуемого геологического пространства определяются линии (профили), по которым выполняется обследование.
На профилях определяются места размещения физических точек выполнения зондирования (ф.т.) и расстояние между ними - шаг, который, как правило, принимается на профиле одинаковым между ф.т. Обследование в каждой ф.т. выполняется отдельно, после чего выполняется последовательный переход к следующей ф.т. на профиле для ее обследования.
- Для выполнения обследования в ф.т. по вершинам (углам) условно сформированного вокруг нее прямоугольника размещается устройство, генерирующее зондирующий сигнал, и три регистрирующих его приемных устройства таким образом, что в центре этого прямоугольника находится обследуемая физическая точка (ф.т.).
- В каждой обследуемой ф.т. выполняется генерация передающим устройством зондирующего сигнала и, в течение заранее заданного промежутка времени, на всех трех приемных устройствах регистрируются отражения этого сигнала, произошедшие от подповерхностных разделов сред и аномалий и идентифицируемые по локальным максимумам амплитуды мощности или напряжения отраженных сигналов. Аналоговые входные отраженные сигналы на приемных устройствах с помощью аналого-цифрового преобразователя (АЦП) преобразуются в дискретный код (цифровые сигналы), которые формируют базу данных выполненных измерений.
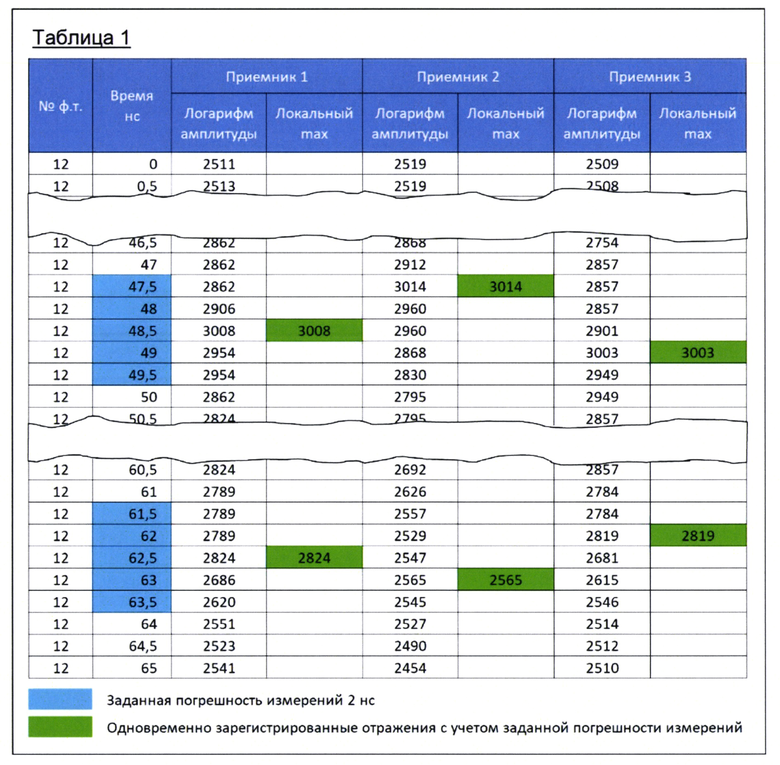
Камеральные работы:
- Полученная в ходе полевых работ база данных выполненных измерений подвергается машинной обработке с целью выявления в данных по каждой обследованной ф.т. троек отражений зондирующего сигнала, зарегистрированных в этой ф.т. всеми тремя приемными устройствами в относительно равное время с учетом задаваемой погрешности измерений (Таблица 1). Поскольку свойством прямой четырехугольной пирамиды является равенство любой пары ее ребер, принимается, что все отражения зондирующего сигнала, образующие ребра такой пирамиды, в каждой такой тройке произошли в подповерхностном пространстве от одной и той же точки, находящейся в вершине этой пирамиды. Вершина указанной пирамиды находится на линии, перпендикулярной поверхности обследуемого геологического пространства и проведенной из обследованной ф.т. (фиг. 3). Тройки этих отраженных сигналов, имеющих более продолжительное время их регистрации приемными устройствами, соответствуют отражениям зондирующего сигнала от точек, расположенных в более глубоких горизонтах подповерхностного пространства.
- По каждой такой тройке зарегистрированных отражений зондирующего сигнала в ф.т. выполняется усреднение времени его регистрации, и на основании дальнейшего расчета по формуле 1 длины ребер воображаемых прямых пирамид рассчитываются высоты этих пирамид, которые равны глубине залегания в подповерхностном пространстве точек раздела сред и аномалий, от которых произошли отражения зондирующего сигнала в этой ф.т.
- На основании полученных данных по глубине залегания разделов сред и аномалий в каждой лежащей на профиле ф.т. выполняется построение разреза обследованного участка геологического пространства по этому профилю, на котором фиксируются локализованные разделы сред и аномалии в подповерхностном пространстве.
При выполнении измерений возможно применение одного устройства, генерирующего зондирующий сигнал и устанавливаемого в данной физической точке выполнения зондирования в один из углов основания воображаемой прямой четырехугольной пирамиды, и одного приемного устройства, которое при проведении измерений в этой физической точке последовательно перемещается по другим углам основания воображаемой пирамиды. После очередной установки приемного устройства в каждой последующей позиции (углу) основания этой пирамиды, генерируется зондирующий сигнал, отражение которого регистрируется приемным устройством. Так как за время перемещения приемного устройства из одного угла основания воображаемой пирамиды в другой, геологические свойства обследуемого подповерхностного пространства не меняются, то, при обработке полученных результатов измерений, время генерации всех трех зондирующих сигналов в данной физической точке выполнения зондирования принимается условно равным.
Таким образом, заявленное техническое решение, охарактеризованное представленной совокупностью существенных признаков, позволяет повысить эффективность геофизических изысканий, проводимых с помощью зондирующих сигналов волновой природы за счет:
- повышения достоверности исходных данных исследований путем более точного позиционирования точек разделов сред, от которых зарегистрировано отражение зондирующего сигнала;
- снижения количества регистрируемых шумов и отражений от не поддающихся локализации точек на разделе сред в подповерхностном пространстве, искажающих результаты исследований и препятствующих их интерпретации;
- упрощения интерпретации результатов исследований путем более достоверных исходных данных и меньшего количества шумов и отражений от не поддающихся локализации точек на разделе сред в подповерхностном пространстве;
- увеличения глубины исследований путем снижения шумов и повышения возможности идентификации информационно значимых отражений зондирующего сигнала в более глубоких горизонтах исследуемого подповерхностного пространства;
- повышения качества детализации при визуализации результатов исследований;
- ускорения обработки результатов исследований и упрощения их машинной обработки за счет сокращения объема анализируемых информационно значимых данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ И УСТРОЙСТВО "ДИФФЕРЕНЦИАЛЬНЫЙ РАДАР" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2148842C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ "МЕТАРАДАР" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263934C1 |
| Способ измерения параметров слоев дорожной одежды | 2019 |
|
RU2735312C1 |
| СПОСОБ И СИСТЕМА РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМНЫХ НЕДР | 2009 |
|
RU2436130C2 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2005 |
|
RU2282875C1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2011 |
|
RU2460090C1 |
| Способ электромагнитного зондирования околоскважинного пространства газовых и нефтяных скважин и устройство для его осуществления | 2017 |
|
RU2677174C1 |
| СПОСОБ ПОДПОВЕРХНОСТНОГО ЗОНДИРОВАНИЯ С СИНТЕЗИРОВАНИЕМ РАДИОГОЛОГРАММ И ВОССТАНОВЛЕНИЕМ ПО НИМ ИЗОБРАЖЕНИЙ | 2006 |
|
RU2345381C2 |
| СПОСОБ ПОСТРОЕНИЯ ИЗОБРАЖЕНИЯ ПОДПОВЕРХНОСТНОГО ОБЪЕКТА | 2008 |
|
RU2401439C2 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ ВЕЩЕСТВА | 2006 |
|
RU2340913C2 |
Изобретение относится к области геофизических изысканий с целью выявления и локализации геологических структур, подповерхностных объектов. Первый вариант способа зондирования подповерхностного пространства с помощью сигналов волновой природы включает генерирование зондирующего сигнала, регистрацию сигнала, отраженного от подповерхностного раздела сред, с последующей обработкой результатов и определением параметров для расчета положения точки отражения зондирующего сигнала от раздела сред. Генерирующее зондирующий сигнал передающее устройство и три приемных устройства, регистрирующих сигнал, отраженный от подповерхностного раздела сред, размещают в вершинах условно формируемого на поверхности или над поверхностью исследуемого геологического пространства прямоугольника с центром в обследуемой физической точке. Расстояние до точки раздела сред от поверхности, с которой ведут исследования, определяют по отраженным сигналам, принятым всеми тремя приемными устройствами одновременно, как высоту условной прямой пирамиды, основанием которой является прямоугольник, условно сформированный передающим и тремя приемными устройствами, размещенными в его вершинах. При расчете высоты пирамиды длину каждого из ребер этой пирамиды определяют как половину произведения скорости распространения и зондирующего сигнала и временного интервала между временем генерации зондирующего сигнала и временем регистрации его отражения от раздела сред в подповерхностном пространстве каждым из трех принимающих его отражение устройств. Во втором варианте исполнения способа одно приемное устройство поочередно устанавливают в каждой из трех вершин условного прямоугольника. При этом генерацию зондирующего сигнала осуществляют каждый раз после установки приемного устройства в очередной вершине прямоугольника. Технический результат: повышение эффективности геофизических изысканий. 2 н. и 6 з.п. ф-лы, 4 ил, 1 табл.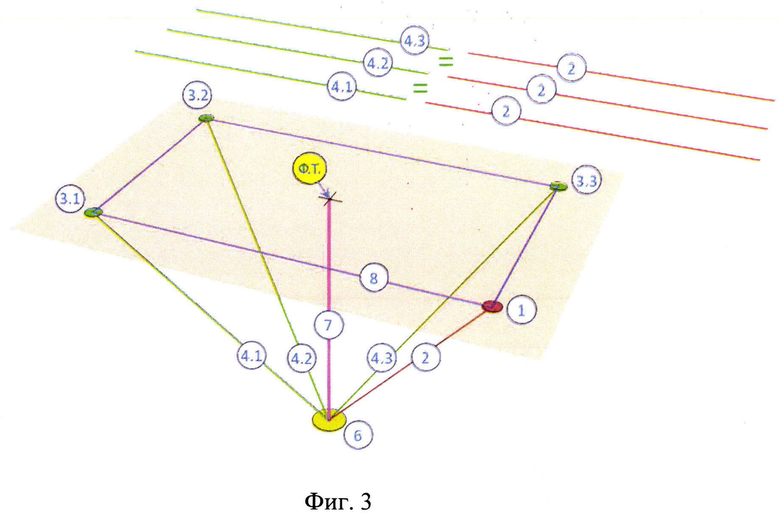
1. Способ зондирования подповерхностного пространства с помощью сигналов волновой природы, включающий генерирование зондирующего сигнала, регистрацию сигнала, отраженного от подповерхностного раздела сред, с последующей обработкой результатов и определением параметров для расчета положения точки отражения зондирующего сигнала от раздела сред, при этом генерирующее зондирующий сигнал передающее устройство и три приемных устройства, регистрирующих сигнал, отраженный от подповерхностного раздела сред, размещают в вершинах условно формируемого на поверхности или над поверхностью исследуемого геологического пространства прямоугольника с центром в обследуемой физической точке, причем расстояние до точки раздела сред от поверхности, с которой ведут исследования, определяют по отраженным сигналам, принятым всеми тремя приемными устройствами одновременно, как высоту условной прямой пирамиды, основанием которой является прямоугольник, условно сформированный передающим и тремя приемными устройствами, размещенными по его вершинам, а при расчете высоты пирамиды длину каждого из ребер этой пирамиды определяют как половину произведения скорости распространения используемого зондирующего сигнала и временного интервала между временем генерации зондирующего сигнала и временем регистрации его отражения от раздела сред в подповерхностном пространстве каждым из трех принимающих его отражение устройств.
2. Способ по п. 1, отличающийся тем, что устанавливают временной интервал, в течение которого время регистрации отражений зондирующего сигнала на всех трех приемных устройствах условно принимают одновременным, при этом для расчета положения точки отражения зондирующего сигнала от подповерхностных разделов сред используют усредненный результат измерений, выполненных всеми тремя приемными устройствами.
3. Способ по п. 1, отличающийся тем, что в каждой физической точке выполнения зондирования генерируют несколько последовательных импульсов зондирующего сигнала, при этом отбраковывают результаты, не удовлетворяющие условию одновременной регистрации отраженного сигнала всеми тремя приемными устройствами, а остальные результаты усредняют.
4. Способ по п. 3, отличающийся тем, что в каждой физической точке выполнения зондирования генерируют несколько последовательных импульсов зондирующего сигнала, отличающихся по физическим характеристикам, в том числе по мощности, по частоте, по продолжительности, по форме генерируемого импульса.
5. Способ зондирования подповерхностного пространства с помощью сигналов волновой природы, включающий генерирование зондирующего сигнала, регистрацию сигнала, отраженного от подповерхностного раздела сред, с последующей обработкой результатов и определением параметров для расчета положения точки отражения зондирующего сигнала от раздела сред, при этом генерирующее зондирующий сигнал передающее устройство устанавливают в одной из вершин прямоугольника, условно формируемого на поверхности или над поверхностью исследуемого геологического пространства, а одно приемное устройство регистрирующее сигнал, отраженный от подповерхностного раздела сред, поочередно устанавливают в каждой из других вершин этого прямоугольника, при этом генерацию зондирующего сигнала осуществляют каждый раз после установки приемного устройства в очередной вершине прямоугольника, причем расстояние до точки раздела сред от поверхности, с которой ведут исследования, определяют по отраженным сигналам, принятым на каждой из трех позиций приемного устройства, как высоту условной прямой пирамиды, основанием которой является условно сформированный прямоугольник с позициями для передающего и приемного устройств по его вершинам, а при расчете высоты пирамиды длину каждого из ребер этой пирамиды определяют как половину произведения скорости распространения используемого зондирующего сигнала и временного интервала, условно равного для каждой из трех позиций приемного устройства, между временем генерации зондирующего сигнала и временем регистрации его отражения от раздела сред в подповерхностном пространстве.
6. Способ по п. 5, отличающийся тем, что устанавливают временной интервал, в течение которого время регистрации отражений зондирующего сигнала на каждой из трех позиций приемного устройства условно принимают одновременным, при этом для расчета положения точки отражения зондирующего сигнала от подповерхностных разделов сред результат измерений, выполненных на всех трех позициях приемного устройства, усредняют.
7. Способ по п. 5, отличающийся тем, что в каждой физической точке выполнения зондирования генерируют несколько последовательных импульсов зондирующего сигнала, при этом отбраковывают результаты, не удовлетворяющие условию одновременного приема отраженного сигнала на каждой из трех позиций приемного устройства, а остальные результаты усредняют.
8. Способ по п. 5, отличающийся тем, что в каждой физической точке выполнения зондирования генерируют несколько последовательных импульсов зондирующего сигнала, отличающихся по физическим характеристикам, в том числе по мощности, по частоте, по продолжительности, по форме генерируемого импульса.
| СПОСОБ ГЕОРАДИОЛОКАЦИИ МНОГОЛЕТНЕМЕРЗЛЫХ ПОРОД | 2011 |
|
RU2490671C2 |
| СПОСОБ ПОДПОВЕРХНОСТНОГО ЗОНДИРОВАНИЯ | 2009 |
|
RU2393501C1 |
| СПОСОБ ПОСТРОЕНИЯ ИЗОБРАЖЕНИЯ ПОДПОВЕРХНОСТНОГО ОБЪЕКТА | 2008 |
|
RU2401439C2 |
| Контролируемый сумматор | 1990 |
|
SU1783517A1 |
| МАГНИТНОЕ УСТРОЙСТВО ДЛЯ ОЧИСТКИ ГАЗОВ | 1991 |
|
RU2023476C1 |
