Изобретение относится к судостроению, конкретно к автономным необитаемым подводным самоходным аппаратам (планерам – глайдерам) и может быть использовано для исследования водных акваторий.
Известен аппарат «ЭКИП» (см. Исаев С.А., Судаков А.Г., Баранов П.А., Пригородов Ю.С. Эффект суперциркуляции при обтекании толстого профиля с вихревыми ячейками / Доклады академии наук, Механика, том 377, №2, 2001. – стр. 198-200). Аппарат имеет форму толстого крыла и использует движительную установку для функционирования системы отсоса из размещенных по контуру аппарата вихревых ячеек. Обнаружена принципиальная возможность перестройки крупномасштабной вихревой структуры в следе, обеспечение безотрывного обтекания, уменьшение лобового сопротивления и увеличение подъемной силы путем воздействия на течение в малогабаритной ячейке.
Недостатки данного аппарата связаны с расходом энергии, затрачиваемой на функционирование системы отсоса из размещенных по контуру аппарата вихревых ячеек, а также с трудностями в реализации механизма отсоса из вихревых ячеек, что снижает его надежность и живучесть, ухудшает параметры устойчивости и может быть причиной навигационных аварий.
Известен планирующий подводный аппарат «BOOMERANG», принимаемый за прототип (см. Koterayama W., Nakamura M., Ito Y., Yoshimura H. Autonomous Underwater Vehicle for Practical Use in Ocean Observations. // Proceedings of the Tenth (2012) ISOPE Pacific/Asia Offshore Mechanics Symposium, Vladivostok, Russia, October 3-5, 2012, pp. 170-175). Планирующий подводный аппарат «BOOMERANG» имеет дискообразную форму корпуса и включает систему управления плавучестью, состоящую из гидроцилиндров, расположенных симметрично относительно вертикальной оси симметрии планирующего подводного аппарата, а также систему тонкой дифферентовки, состоящую из дифферентовочных грузов, перемещающихся по направляющим стержням, расположенным симметрично относительно вертикальной оси симметрии планирующего подводного аппарата.
Недостатки данного планирующего подводного аппарата связаны с тем, что дискообразная форма корпуса планирующего подводного аппарата приводит к большому значению опрокидывающего гидродинамического момента при его маневрировании и ухудшению параметров устойчивости при движении в вертикальной плоскости. Это, в свою очередь, снижает его надежность и живучесть, ухудшает параметры устойчивости и может быть причиной навигационных аварий.
Задачей изобретения является разработка новой формы корпуса планирующего подводного аппарата, которая позволяет устранить недостатки прототипа, повысить надежность и живучесть, улучшить параметры устойчивости движения, тем самым, уменьшить вероятность навигационных аварий и повысить безопасность управления планирующим подводным аппаратом.
Сущность изобретения заключается в том, что планирующий подводный аппарат включает дискообразный корпус, систему управления плавучестью, состоящую из гидроцилиндров, расположенных симметрично относительно вертикальной оси симметрии планирующего подводного аппарата, а также систему тонкой дифферентовки, состоящую из дифферентовочных грузов, установленных с возможностью перемещения по направляющим стержням, расположенным симметрично относительно вертикальной оси симметрии планирующего подводного аппарата. При этом в дискообразном корпусе вблизи внешнего обвода симметрично на верхней и нижней частях его созданы профилированные кольцеобразные проточки, имеющие переменный радиус кривизны, при этом минимальный радиус кривизны составляющий (0,3 – 1,1)×R сформирован по направлению к внешнему обводу дискообразного корпуса, где R – радиус кривизны внешнего обвода дискообразного корпуса, а по направлению к центральной части дискообразного корпуса сформировано плавное сопряжение профилированных кольцеобразных проточек с поверхностью дискообразного корпуса планирующего подводного аппарата. Профилированные кольцеобразные проточки расположены на расстоянии (1,5 – 4,5)×R от внешнего обвода дискообразного корпуса планирующего подводного аппарата.
Сущность изобретения поясняется чертежом, где
на фиг.1 – показана схема, отражающая вид сбоку планирующего подводного аппарата;
на фиг.2 – показана схема, отражающая геометрию профилированных кольцеобразных проточек;
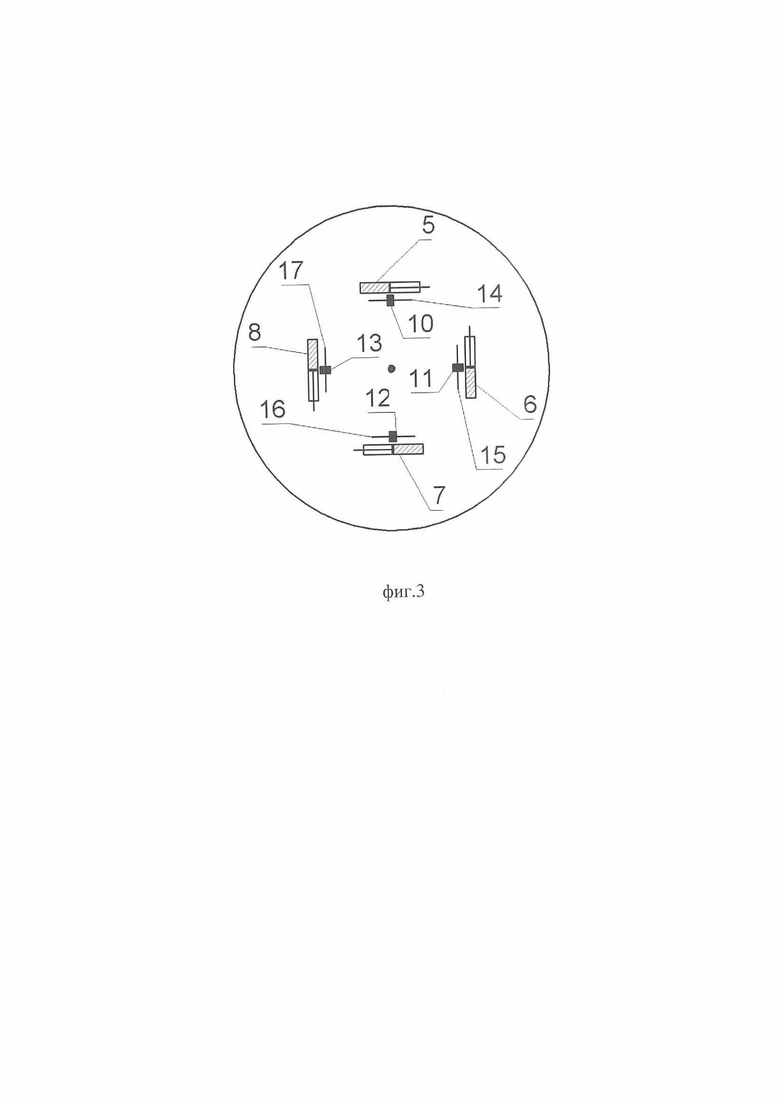
на фиг.3 – показана схема, отражающая исполнительные тракты системы управления плавучестью и системы тонкой дифферентовки;
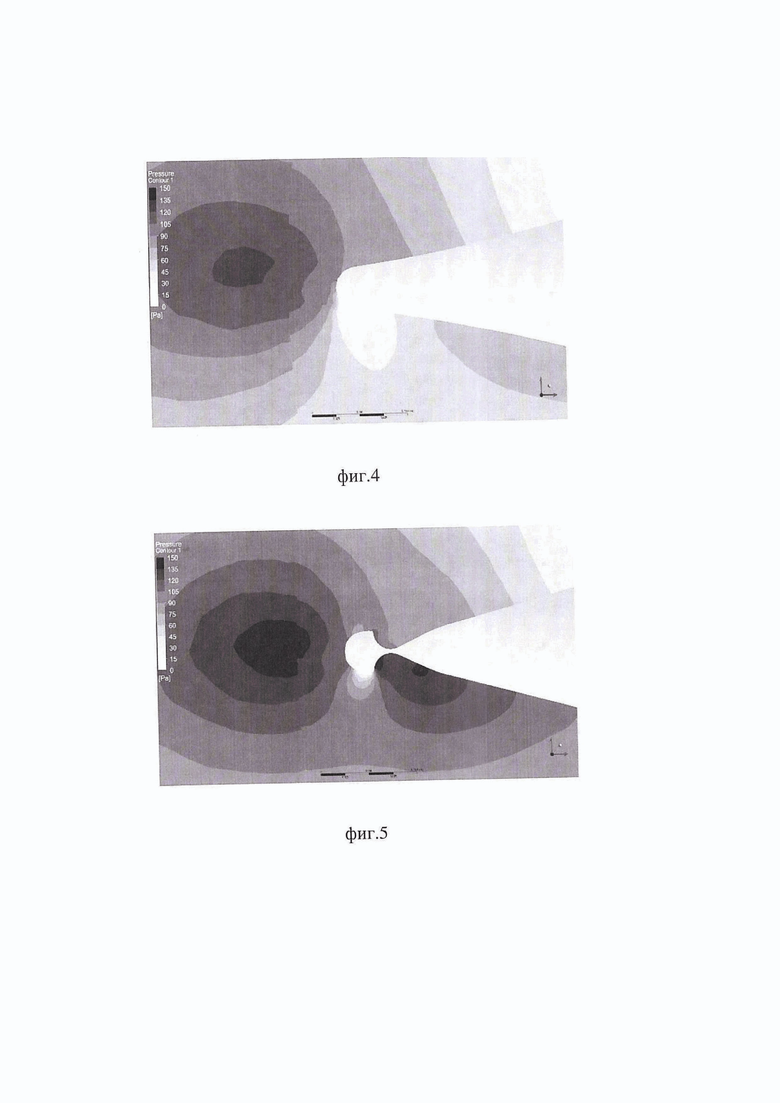
на фиг.4 – показана схема, отражающая поле статического давления потока в районе кормовой части планирующего подводного аппарата при угле атаки 15 градусов без профилированных кольцеобразных проточек;
на фиг.5 – показана схема, отражающая поле статического давления потока в районе кормовой части планирующего подводного аппарата при угле атаки 15 градусов с наличием профилированных кольцеобразных проточек;
на фиг.6 – показана схема, отражающая поле статического давления потока в районе носовой части планирующего подводного аппарата при угле атаки 15 градусов без профилированных кольцеобразных проточек;
на фиг.7 – показана схема, отражающая поле статического давления потока в районе носовой части планирующего подводного аппарата при угле атаки 15 градусов с наличием профилированных кольцеобразных проточек;
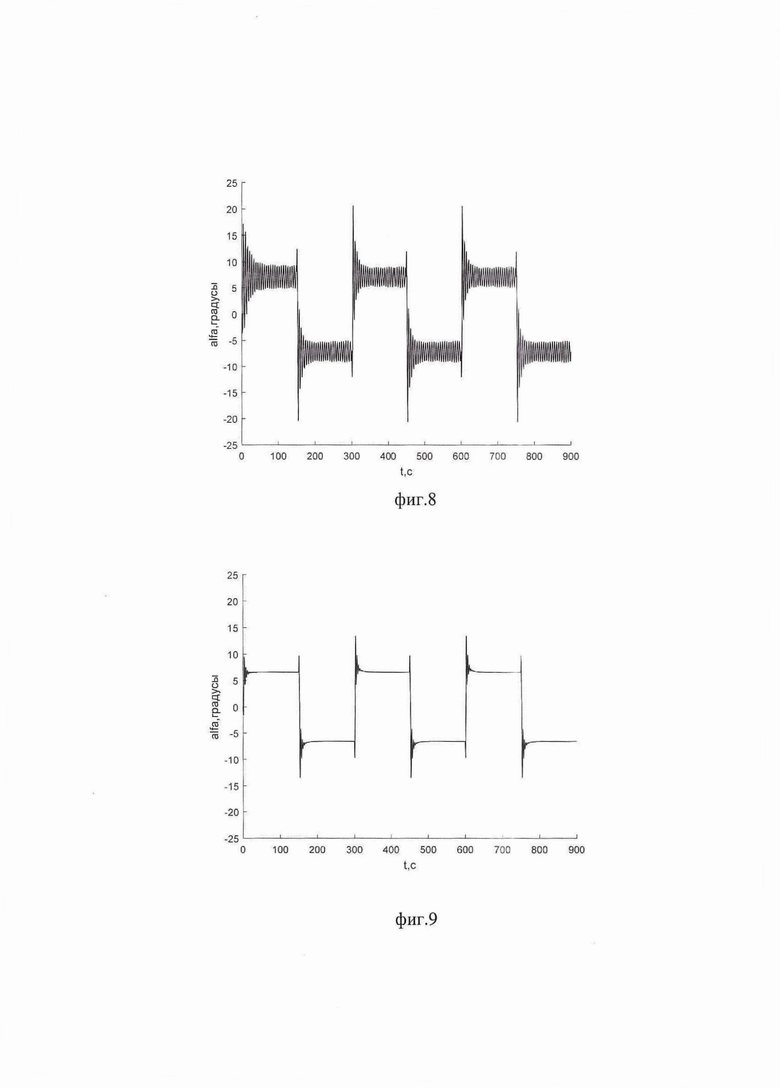
на фиг.8 – показана схема, отражающая зависимость изменения угла атаки планирующего подводного аппарата от времени без профилированных кольцеобразных проточек;
на фиг.9 – показана схема, отражающая зависимость изменения угла атаки планирующего подводного аппарата от времени с наличием профилированных кольцеобразных проточек.
Планирующий подводный аппарат состоит их дискообразного корпуса 1, имеющего профилированные кольцеобразные проточки 2,3, расположенные вблизи внешнего обвода 4 симметрично на верхней и нижней частях дискообразного корпуса 1. Профилированные кольцеобразные проточки 2,3 имеют переменный радиус кривизны, при этом минимальный радиус кривизны составляющий (0,3 – 1,1)×R сформирован по направлению к внешнему обводу 4 дискообразного корпуса 1 планирующего подводного аппарата, где R – радиус кривизны внешнего обвода 4 дискообразного корпуса 1 планирующего подводного аппарата, а по направлению к центральной части дискообразного корпуса 1 планирующего подводного аппарата сформировано плавное сопряжение проточек 2,3 с поверхностью дискообразного корпуса 1 планирующего подводного аппарата. Профилированные кольцеобразные проточки 2,3 расположены на расстоянии (1,5 – 4,5)×R от внешнего обвода 4 дискообразного корпуса 1 планирующего подводного аппарата. В дискообразном корпусе 1 планирующего подводного аппарата размещена система управления плавучестью, состоящая из гидроцилиндров 5,6,7,8, расположенных симметрично относительно вертикальной оси симметрии 9 планирующего подводного аппарата, а также система тонкой дифферентовки, состоящая из дифферентовочных грузов 10,11,12,13, перемещающихся по направляющим стержням 14,15,16,17, расположенным симметрично относительно вертикальной оси симметрии 9 планирующего подводного аппарата.
Планирующий подводный аппарат работает следующим образом. За счет приема или удаления воды из гидроцилиндров 5,6,7,8, а также за счет смещения дифферентовочных грузов 10,11,12,13 по направляющим стержням 14,15,16,17 задают угол атаки планирующему подводному аппарату в процессе движения. При этом происходит значительное повышение статического давления потока в нижней кормовой части планирующего подводного аппарата при положительных углах атаки за счет того, что поток натекает на боковую стенку профилированной кольцеобразной проточки. Кроме того, при положительных углах атаки наблюдается уменьшение длины зоны разряжения в верхней носовой части планирующего подводного аппарата. Это, в свою очередь, приводит к уменьшению опрокидывающего гидродинамического момента, что улучшает параметры устойчивости движения планирующего подводного аппарата. В качестве примера приведены распределения статического давления потока в районе кормовой части планирующего подводного аппарата при угле атаки 15 градусов без профилированных кольцеобразных проточек (см. фиг. 4) и с наличием профилированных кольцеобразных проточек (см. фиг. 5). Видно значительное повышение статического давления потока в нижней кормовой части планирующего подводного аппарата с наличием профилированных кольцеобразных проточек. Также приведены распределения статического давления потока в районе носовой части планирующего подводного аппарата при угле атаки 15 градусов без профилированных кольцеобразных проточек (см. фиг. 6) и с наличием профилированных кольцеобразных проточек (см. фиг. 7). Видно уменьшение длины зоны разряжения в верхней носовой части планирующего подводного аппарата с наличием профилированных кольцеобразных проточек. На фиг. 8 приведена зависимость изменения угла атаки планирующего подводного аппарата от времени без профилированных кольцеобразных проточек, а на фиг. 9 приведена зависимость изменения угла атаки планирующего подводного аппарата от времени с наличием профилированных кольцеобразных проточек. Видно, что наличие профилированных кольцеобразных проточек значительно уменьшает колебания планирующего подводного аппарата и улучшает параметры устойчивости планирующего подводного аппарата в процессе движения.
Таким образом, повышается безопасность управления планирующим подводным аппаратом, надежность и живучесть при выполнении им сложного маневрирования за счет значительного улучшения параметров устойчивости движения, тем самым, уменьшается вероятность навигационных аварий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Планирующий подводный аппарат | 2020 |
|
RU2747522C1 |
| Планирующий подводный аппарат | 2020 |
|
RU2731590C1 |
| Подводный аппарат планирующего типа | 2020 |
|
RU2747106C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНО-НАДВОДНЫЙ АППАРАТ ПЛАНЕРНОГО ТИПА | 2024 |
|
RU2831312C1 |
| БУКСИРОВЩИК ВОДОЛАЗА | 1992 |
|
RU2153438C1 |
| БУКСИРОВЩИК ВОДОЛАЗА | 1992 |
|
RU2005643C1 |
| Подводный планер-глайдер | 2017 |
|
RU2669244C1 |
| Подводный поисковый аппарат | 2023 |
|
RU2805898C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ МУХАМЕДОВА НА ПРЫЖКОВОМ ШАССИ | 2011 |
|
RU2497721C2 |
| Способ повышения пропульсивных качеств подводного аппарата при создании тяги | 2023 |
|
RU2827644C1 |


Изобретение относится к судостроению, конкретно к автономным необитаемым подводным самоходным аппаратам для исследования водных акваторий. Планирующий подводный аппарат включает дискообразный корпус, систему управления плавучестью, состоящую из гидроцилиндров, расположенных симметрично относительно вертикальной оси симметрии планирующего подводного аппарата, а также систему тонкой дифферентовки, состоящую из дифферентовочных грузов, установленных с возможностью перемещения по направляющим стержням, расположенным симметрично относительно вертикальной оси симметрии планирующего подводного аппарата. При этом в дискообразном корпусе вблизи внешнего обвода симметрично на верхней и нижней частях его созданы профилированные кольцеобразные проточки, имеющие переменный радиус кривизны. Достигается безопасность управления планирующим подводным аппаратом, надежность и живучесть при выполнении им сложного маневрирования, тем самым уменьшается вероятность навигационных аварий. 9 ил.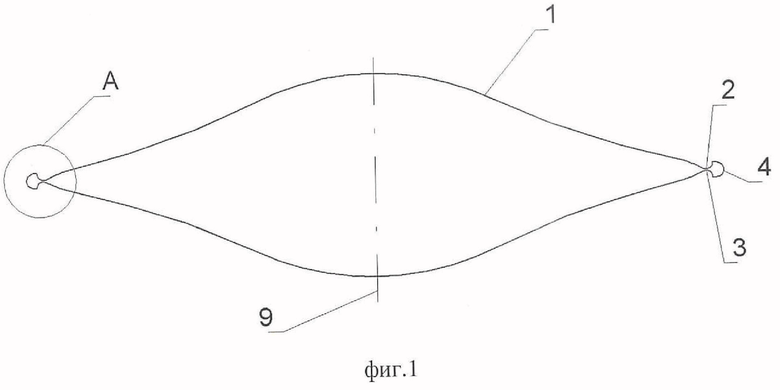
Планирующий подводный аппарат, включающий дискообразный корпус, систему управления плавучестью, состоящую из гидроцилиндров, расположенных симметрично относительно вертикальной оси симметрии планирующего подводного аппарата, а также систему тонкой дифферентовки, состоящую из дифферентовочных грузов, установленных с возможностью перемещения по направляющим стержням, расположенным симметрично относительно вертикальной оси симметрии планирующего подводного аппарата, отличающийся тем, что в дискообразном корпусе вблизи внешнего обвода симметрично на верхней и нижней частях его созданы профилированные кольцеобразные проточки, имеющие переменный радиус кривизны, при этом минимальный радиус кривизны, составляющий (0,3-1,1)R, сформирован по направлению к внешнему обводу дискообразного корпуса, где R – радиус кривизны внешнего обвода дискообразного корпуса, а по направлению к центральной части дискообразного корпуса сформировано плавное сопряжение профилированных кольцеобразных проточек с поверхностью дискообразного корпуса планирующего подводного аппарата, профилированные кольцеобразные проточки расположены на расстоянии (1,5-4,5)R от внешнего обвода дискообразного корпуса планирующего подводного аппарата.
| Научный журнал "Информационные и математические технологии в науке и управлении", статья "Анализ параметров пространственного движения подводного глайдера дискообразной формы" опубл.25.11.2022, А.Л | |||
| Сухоруков, М.А Титов, Санкт-Петербург: "ЦКБ морской техники "Рубин", найдено в "Интернет" 07.11.2023 |
