Изобретение относится к судостроению, конкретно к автономным необитаемым подводным самоходным аппаратам (планерам-глайдерам) и может быть использовано для исследования водных акваторий.
Известен подводный планер, состоящий из корпуса, крыла из двух шарнирно прикрепленных к корпусу консолей, киля и системы изменения углов атаки консолей (пат. RU №2490164, опубл. 20.08.2013, МПК: B63G 8/00). Консоли установлены на оси вращения, проходящей за центром давления крыла с возможностью саморегуляции угла атаки крыла в зависимости от скорости и направления набегающего потока без использования дополнительных энергоресурсов.
Недостатки данного подводного планера связаны с трудностями в реализации механизма отклонения консолей на значительных глубинах из-за высокого забортного давления, что снижает его надежность и живучесть.
Известно погружное транспортное средство, разработанное в США (US 2009241826 A1, 01.10.2009). Погружное транспортное средство оборудовано системой управления движением каждой из консолей крыла, обеспечивающей движение консолей крыла вверх, когда транспортное средство опускается вниз и вниз, когда транспортное средство идет вверх. Такое устройство подводного транспортного средства за счет V образности крыла приводит к увеличению его поперечной устойчивости и дает возможность управления курсом за счет удержания электромагнитом или другим устройством одной из консолей в противоположном положении.
Недостатки данного погружного транспортного средства связаны с дополнительными затратами энергии для перемещения консолей крыла, а также достаточно сложным механизмом перемещения консолей крыла, что снижает его надежность и живучесть.
Известен подводный планер-глайдер Slocum, разработанный американской корпорацией Teledyne, принимаемый за прототип (см. Лопота А.В., Николаев А.Б. Морские робототехнические комплексы военного и специального назначения / А.В. Лопота. - СПб.: Издательство ЦНИИ РТК, 2016, стр. 16-17). Перемещение планера-глайдера в водной среде по глубине осуществляется за счет изменения остаточной плавучести. Для этого вместо силовой установки с гребным винтом планер-глайдер оснащают системой автоматического управления плавучестью (САУП), которая формирует управляющие воздействия в виде изменения величины и знака остаточной плавучести глайдера. Исполнительный тракт САУП состоит из балластной цистерны, размещенной в прочном корпусе глайдера, и эластомерной емкости в проницаемой части, распределительных электромагнитных клапанов, гидронасоса рабочей жидкости (обычно минеральное масло). При постоянном массовом водоизмещении объемное водоизмещение аппарата может управляемо меняться при откачке рабочей жидкости из балластной цистерны в эластичную емкость или, наоборот, подаче жидкости из емкости в цистерну, приводя к изменению плавучести. Так как исполнительный тракт САУП является основным потребителем энергии от бортового источника, автономность глайдера в значительной степени зависит как от принятого алгоритма работы САУП, так и от типа исполнительного тракта. При спуске на воду планер-глайдер Slocum постепенно погружается по пологой наклонной траектории со средней скоростью 0,8 узла. Затем он всплывает по восходящей к поверхности траектории и далее цикл повторяется. Управление курсом планера-глайдера осуществляют за счет отклонения кормового вертикального руля за стабилизатором.
Недостатки данного устройства управления планером-глайдером по курсу связаны с трудностями в реализации механизма отклонения кормового вертикального руля на значительных глубинах из-за высокого забортного давления, что снижает его надежность и живучесть.
Задачей изобретения является разработка нового устройства маневрирования подводного планера-глайдера по курсу без перекладок вертикального руля, которое позволяет устранить недостатки прототипа и защитить исполнительные механизмы и конструкции от агрессивного воздействия морской воды и, тем самым, повышает надежность и живучесть подводного планера-глайдера.
Технический результат изобретения заключается в отсутствии необходимости перекладок вертикального кормового руля при маневрировании планера-глайдера по курсу, что устраняет возможные протечки в исполнительных механизмах перекладки кормового вертикального руля и позволяет полностью отказаться от его использования, защищает конструкции от агрессивного воздействия морской воды и повышает его надежность и живучесть.
Сущность изобретения заключается в том, что подводный планер-глайдер, включает систему управления плавучестью, состоящую из балластных цистерн, распределительных электромагнитных клапанов, гидронасосов рабочей жидкости, размещенных в прочном корпусе подводного планера-глайдера, эластомерных емкостей, размещенных в проницаемой части подводного планера-глайдера. Система управления плавучестью разделена на два независимо работающих исполнительных тракта, расположенных симметрично относительно диаметральной плоскости подводного планера-глайдера, а эластомерные емкости выполнены с изменяемым объемом для осуществления смещения точки приложения равнодействующей силы избыточной плавучести относительно диаметральной плоскости, с возможностью накренения и, соответственно, маневрирования подводного планера-глайдера по курсу.
Сущность изобретения поясняется чертежом, где
на фиг. 1 показана схема, отражающая работу двух исполнительных трактов системы управления плавучестью.
Подводный планер-глайдер состоит их прочного корпуса 1, проницаемой части 2 и системы управления плавучестью 3-10, которая разделена на два независимо работающих исполнительных тракта 3, 5, 7, 9 и 4, 6, 8, 10, расположенных симметрично относительно диаметральной плоскости подводного планера-глайдера. Исполнительные тракты системы управления плавучестью состоят из балластных цистерн 3 и 4, гидронасосов рабочей жидкости (обычно минеральное масло) 5, 6, распределительных электромагнитных клапанов 7, 8, размещенных в прочном корпусе 1, а также эластомерных емкостей 9, 10, размещенных в проницаемой части 2.
Эластомерные емкости 9, 10 выполнены с изменяемым объемом для осуществления смещения точки приложения равнодействующей силы избыточной плавучести относительно диаметральной плоскости, с возможностью накренения и, соответственно, маневрирования подводного планера-глайдера по курсу.
Устройство для маневрирования подводного планера-глайдера по курсу работает следующим образом. Задают независимую работу трактов системы управления плавучестью, что приводит к различному объему эластомерных емкостей 9 и 10 в проницаемой части 2. Это, в свою очередь, смещает точку приложения равнодействующей силы избыточной плавучести относительно диаметральной плоскости, что приводит к накренению и, соответственно, маневрированию глайдера по курсу.
Отсутствует необходимость перекладок кормового вертикального руля при маневрировании глайдера по курсу, что устраняет возможные протечки в исполнительных механизмах перекладки кормового вертикального руля и позволяет полностью отказаться от его использования, защищает конструкции от агрессивного воздействия морской воды и, тем самым, повышает надежность и живучесть подводного планера-глайдера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Необитаемый подводный аппарат для глубоководных погружений | 2020 |
|
RU2733190C1 |
| Планирующий подводный аппарат | 2020 |
|
RU2731590C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНО-НАДВОДНЫЙ АППАРАТ ПЛАНЕРНОГО ТИПА | 2024 |
|
RU2831312C1 |
| Подводный аппарат планирующего типа | 2020 |
|
RU2747106C1 |
| Планирующий подводный аппарат | 2020 |
|
RU2747522C1 |
| Подводный планер-глайдер | 2021 |
|
RU2763456C1 |
| Автономное устройство обнаружения нарушителей на морском участке границы | 2022 |
|
RU2785655C1 |
| Подводный планер-глайдер | 2024 |
|
RU2834250C1 |
| Глайдер | 2023 |
|
RU2819541C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОДВОДНОГО ПЛАНЕРА | 2018 |
|
RU2680678C1 |

Изобретение относится к судостроению, а именно к автономным необитаемым подводным самоходным аппаратам (планерам-глайдерам) для исследования водных акваторий. Подводный планер-глайдер включает в себя систему управления плавучестью, состоящую из балластных цистерн, распределительных электромагнитных клапанов, гидронасосов рабочей жидкости, размещенных в прочном корпусе подводного планера-глайдера, эластомерных емкостей, размещенных в проницаемой части подводного планера-глайдера. Система управления плавучестью разделена на два независимо работающих исполнительных тракта, расположенных симметрично относительно диаметральной плоскости подводного планера-глайдера. Эластомерные емкости выполнены с изменяемым объемом для осуществления смещения точки приложения равнодействующей силы избыточной плавучести относительно диаметральной плоскости, с возможностью накренения и, соответственно, маневрирования подводного планера-глайдера по курсу. Достигается повышение надежности и живучести планера-глайдера. 1 ил.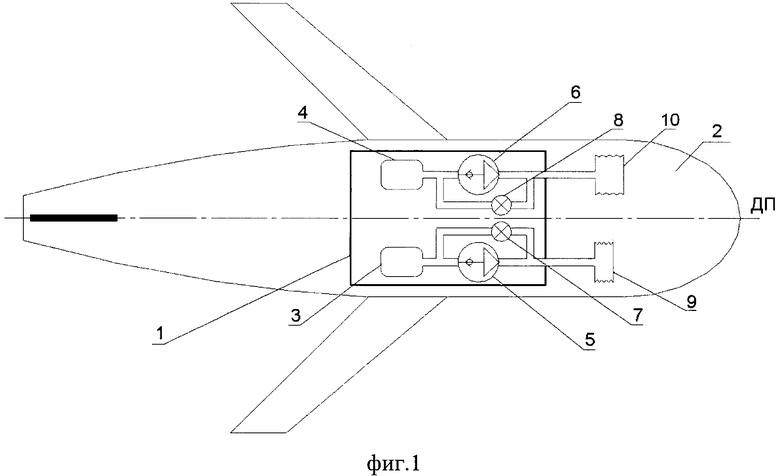
Подводный планер-глайдер, включающий систему управления плавучестью, состоящую из балластных цистерн, распределительных электромагнитных клапанов, гидронасосов рабочей жидкости, размещенных в прочном корпусе подводного планера-глайдера, эластомерных емкостей, размещенных в проницаемой части подводного планера-глайдера, отличающийся тем, что система управления плавучестью разделена на два независимо работающих исполнительных тракта, расположенных симметрично относительно диаметральной плоскости подводного планера-глайдера, а эластомерные емкости выполнены с изменяемым объемом для осуществления смещения точки приложения равнодействующей силы избыточной плавучести относительно диаметральной плоскости, с возможностью накренения и, соответственно, маневрирования подводного планера-глайдера по курсу.
| ПОДВОДНЫЙ ПЛАНЕР (ВАРИАНТЫ) | 2012 |
|
RU2490164C1 |
| Грузозахватное приспособление | 1956 |
|
SU106880A1 |
| JP 2007276609 A, 25.10.2007 | |||
| JP 2008018899 A, 31.01.2008. | |||

