Изобретение относится к судостроению, конкретно к подводным поисковым аппаратам и может быть использовано для исследования водных акваторий.
Известен подводный поисковый аппарат по патенту RU №2039678, МПК В63В 21/66, опубл. 20.07.1995, содержащий корпус, на котором закреплен один конец кабеля и который выполнен с движителями вертикального и горизонтального хода и снабжен телекамерой. Корпус выполнен по форме эллипсоида вращения, большая ось которого совпадает с продольной осью аппарата, а оптическая ось телекамеры расположена в диаметральной плоскости аппарата и составляет с большей осью эллипсоида вращения угол, равный половине угла обзора телекамеры. При этом линия метацентрической высоты аппарата образует с большей осью эллипсоида вращения угол, равный углу обзора телекамеры, причем оси движителей горизонтального хода расположены в плоскости, проходящей через центр масс аппарата, и параллельны большей оси эллипсоида вращения, а оси движителей вертикального хода расположены в плоскости, проходящей через центр масс аппарата, и перпендикулярны большей оси эллипсоида вращения, при этом конец кабеля закреплен в верхней части корпуса в точке, расположенной в секторе, образованном линией метацентрической высоты и большей осью эллипсоида вращения.
Недостатки данного аппарата связаны с наличием двух пар движителей, требующих значительного энергопотребления и сложного управления, что приводит к необходимости применения кабель-троса большого диаметра и жесткости, что в конечном итоге вызывает дополнительное увеличение гидродинамического сопротивления аппарата и снижение его ходовых качеств. Это, в свою очередь снижает его надежность, живучесть и может быть причиной навигационных аварий.
Известен подводный поисковый аппарат, принимаемый за прототип (описание полезной модели к патенту RU 192170 U1, опубл. 05.09.2019, МПК: В63С 11/48, В63G 8/00, В63В 21/66). Подводный поисковый аппарат включает корпус, выполненный в виде эллипсоида вращения, движители горизонтального хода, видеокамеру и кабель-трос, соединяющий аппарат с судном-носителем. При этом вертикальная ось корпуса аппарата лежит в плоскости мидель-шпангоута и аппарат дополнительно содержит устройство изменения положения центра тяжести, расположенное внутри корпуса, в свою очередь, движители горизонтального хода закреплены на корпусе в плоскости мидель-шпангоута.
Недостатки данного подводного поискового аппарата связаны с тем, что при маневрировании подводного поискового аппарата появляется возможность запутывания кабель-троса за движители, закрепленные на корпусе, что снижает его надежность, живучесть и может быть причиной навигационных аварий.
Задачей изобретения является повышение надежности и живучести подводного поискового аппарата, а также уменьшение вероятности навигационных аварий.
Технический результат изобретения заключается в повышении безопасности управления подводным поисковым аппаратом при выполнении им сложного маневрирования за счет того, что движители подводного поискового аппарата полностью размещены внутри корпуса подводного поискового аппарата, что исключает возможность запутывания кабель-троса, повышается надежность, живучесть, уменьшается вероятность навигационных аварий.
Сущность изобретения заключается в том, что подводный поисковый аппарат включает корпус, выполненный в виде эллипсоида вращения, движители горизонтального хода, видеокамеру и кабель-трос, соединяющий аппарат с судном-носителем. Вертикальная ось корпуса аппарата лежит в плоскости мидель-шпангоута и аппарат дополнительно содержит устройство изменения положения центра тяжести, расположенное внутри корпуса. При этом движители горизонтального хода установлены в диаметральной плоскости в носовой и кормовой части подводного поискового аппарата и в плоскости мидель-шпангоута с правого и левого борта подводного поискового аппарата. Движители горизонтального хода, выполнены в виде каналов с рабочими органами, установлены в корпусе с зазорами в виде щелей с возможностью тангенциального втекания и/или вытекания жидкости на поверхности корпуса.
Сущность изобретения поясняется чертежом, где
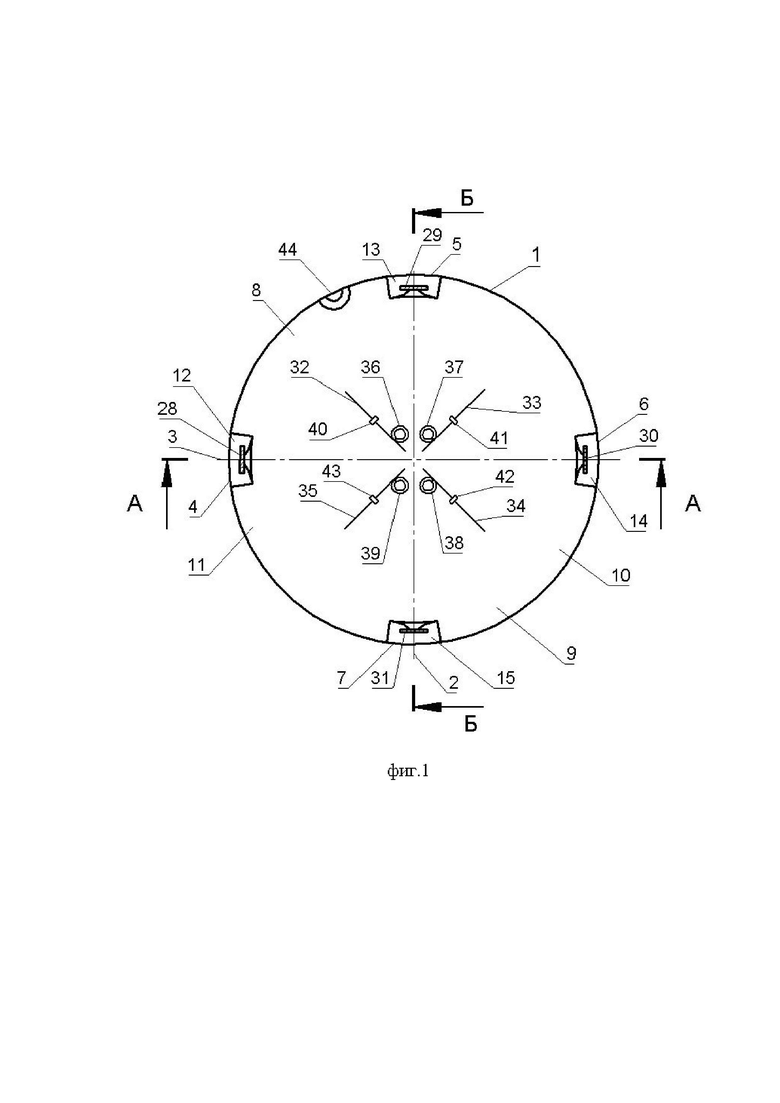
на фиг.1 – показана схема, отражающая вид подводного поискового аппарата сверху;
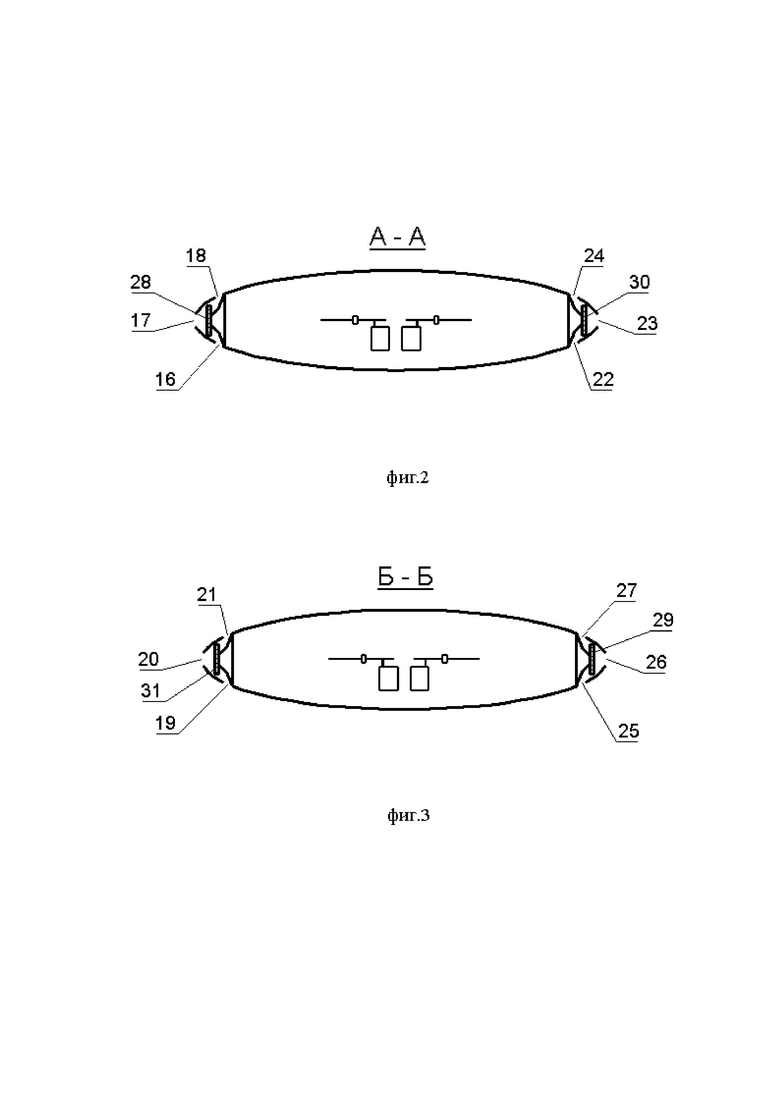
на фиг.2 – показана схема, отражающая сечение подводного поискового аппарата в плоскости мидель-шпангоута;
на фиг.3 – показана схема, отражающая сечение подводного поискового аппарата в диаметральной плоскости.
Подводный поисковый аппарат состоит из корпуса 1, выполненного в виде эллипсоида вращения, симметричного относительно диаметральной плоскости 2 и плоскости мидель-шпангоута 3, движителей горизонтального хода 4,5,6,7 установленных в диаметральной плоскости 2 в носовой 8 и кормовой 9 части подводного поискового аппарата и в плоскости мидель-шпангоута 3 с правого 10 и левого 11 борта подводного поискового аппарата. Движители горизонтального хода 4,5,6,7 образуют каналы 12,13,14,15, которые посредством щелей 16-27 соединены с окружающей средой. В каналах 12, 13,14,15 установлены рабочие органы 28,29,30,31 для создания потока в каналах 12,13,14,15 с реверсом. Рабочие органы 28,29,30,31 могут быть любого типа, а именно: винт, насос, генератор вихрей, магнитогидродинамический и т.п. Внутри корпуса 1 размещено устройство изменения положения центра тяжести, выполненное в виде штанг 32,33,34,35 с приводами 36,37,38,39 для перемещения грузов 40,41,42,43. В носовой 8 части подводного поискового аппарата размещена видеокамера 44.
Подводный поисковый аппарат работает следующим образом. Смещая положение грузов 40,41,42,43 вдоль штанг 32,33,34,35 с использованием приводов 36,37,38,39 изменяют положение центра тяжести подводного поискового аппарата, что приводит к изменению угла крена и дифферента подводного поискового аппарата. Предлагаемое расположение движителей горизонтального хода 4,5,6,7 обеспечивает прямолинейное движение аппарата, как в горизонтальной плоскости, так и при погружении/всплытии с углом атаки. Для движения подводного поискового аппарата вперед рабочие органы 29,31 движителей горизонтального хода 5,7 создают направленный поток жидкости в каналах 13,15 при этом жидкость втекает в каналы 13,15 через щели 19,21,26, а вытекает через щели 20,25,27. Для движения подводного поискового аппарата назад рабочие органы 29,31 движителей горизонтального хода 5,7 создают направленный поток жидкости в каналах 13,15 при этом жидкость втекает в каналы 13,15 через щели 20,25,27, а вытекает через щели 19,21,26. Для движения подводного поискового аппарата в сторону правого борта рабочие органы 28,30 движителей горизонтального хода 4,6 создают направленный поток жидкости в каналах 12,14 при этом жидкость втекает в каналы 12,14 через щели 16,18,23, а вытекает через щели 17,22,24. Для движения подводного поискового аппарата в сторону левого борта рабочие органы 28,30 движителей горизонтального хода 4,6 создают направленный поток жидкости в каналах 12,14 при этом жидкость втекает в каналы 12,14 через щели 17,22,24, а вытекает через щели 16,18,23. Маневрирование подводного поискового аппарата по курсу осуществляют за счет выбора работы соответствующих движителей горизонтального хода 4,5,6,7, а также за счет задания углов крена и дифферента. Остановку подводного поискового аппарата осуществляют путем реверса движителей горизонтального хода 4,5,6,7.
Таким образом, повышается безопасность управления подводным поисковым аппаратом при выполнении им сложного маневрирования за счет того, что движители подводного поискового аппарата полностью размещены внутри корпуса подводного поискового аппарата, что исключает возможность запутывания кабель-троса, повышается надежность, живучесть, уменьшается вероятность навигационных аварий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Планирующий подводный аппарат | 2020 |
|
RU2747522C1 |
| Подводный аппарат планирующего типа | 2020 |
|
RU2747106C1 |
| НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1997 |
|
RU2104210C1 |
| НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1997 |
|
RU2115586C1 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| ПОДВОДНЫЙ ПОИСКОВЫЙ АППАРАТ | 1991 |
|
RU2039678C1 |
| САМОХОДНАЯ ПОЛУПОГРУЖНАЯ ОКЕАНОЛОГИЧЕСКАЯ ИССЛЕДОВАТЕЛЬСКАЯ ПЛАТФОРМА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2006 |
|
RU2343084C2 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| ПОДВОДНЫЙ АППАРАТ ДЛЯ УНИЧТОЖЕНИЯ ПОТЕНЦИАЛЬНО ОПАСНОГО СТАЦИОНАРНОГО ОБЪЕКТА | 2017 |
|
RU2670192C9 |
| НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2434780C2 |
Изобретение относится к судостроению, а именно к подводным поисковым аппаратам, и может быть использовано для исследования водных акваторий. Подводный поисковый аппарат включает в себя корпус, выполненный в виде эллипсоида вращения, движители горизонтального хода, видеокамеру и кабель-трос, соединяющий аппарат с судном-носителем. Вертикальная ось корпуса аппарата лежит в плоскости мидель-шпангоута, и аппарат дополнительно содержит устройство изменения положения центра тяжести, расположенное внутри корпуса. Движители горизонтального хода установлены в диаметральной плоскости в носовой и кормовой части подводного поискового аппарата и в плоскости мидель-шпангоута с правого и левого борта подводного поискового аппарата. Движители горизонтального хода выполнены в виде каналов с рабочими органами и установлены в корпусе с зазорами в виде щелей с возможностью тангенциального втекания и/или вытекания жидкости на поверхности корпуса. Достигается повышение безопасности управления подводным поисковым аппаратом при выполнении им сложного маневрирования. 3 ил.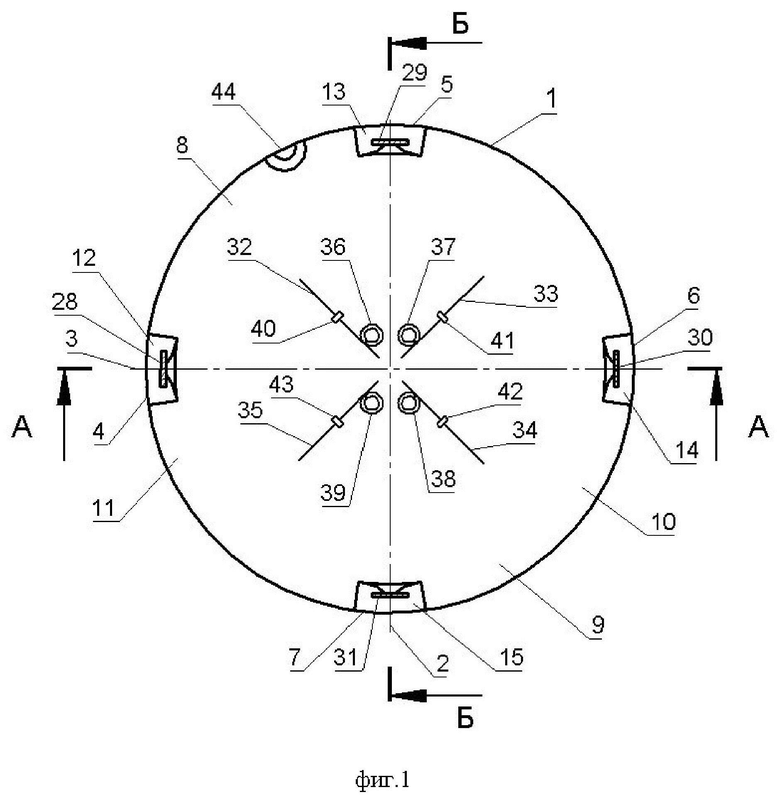
Подводный поисковый аппарат, включающий корпус, выполненный в виде эллипсоида вращения, движители горизонтального хода, видеокамеру и кабель-трос, соединяющий аппарат с судном-носителем, вертикальная ось корпуса аппарата лежит в плоскости мидель-шпангоута и аппарат дополнительно содержит устройство изменения положения центра тяжести, расположенное внутри корпуса, отличающийся тем, что движители горизонтального хода установлены в диаметральной плоскости в носовой и кормовой части подводного поискового аппарата и в плоскости мидель-шпангоута с правого и левого борта подводного поискового аппарата, движители горизонтального хода выполнены в виде каналов с рабочими органами и установлены в корпусе с зазорами в виде щелей с возможностью тангенциального втекания и/или вытекания жидкости на поверхности корпуса.
| КРИСЛЛЛЛИЗАТОР | 0 |
|
SU192170A1 |
| СПОСОБ СОЗДАНИЯ ТЯГИ ЛЮБОГО НАПРАВЛЕНИЯ НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1997 |
|
RU2127692C1 |
| US 4571192 A1, 18.02.1986 | |||
| CN 108639286 B, 19.06.2020 | |||
| Подводный аппарат планирующего типа | 2020 |
|
RU2747106C1 |
| ПОДВОДНЫЙ ПОИСКОВЫЙ АППАРАТ | 1991 |
|
RU2039678C1 |
