Область техники
Настоящее изобретение относится к устройству для компенсации нагрузки, в частности для компенсации гравитационных нагрузок. При предпочтительном и не ограничительном применении настоящее изобретение также относится к связанному с ним экзоскелету.
В целом, настоящее изобретение находит неограничительные применения в области погрузочно-разгрузочных устройств и в области устройств для физической активности и реабилитационных упражнений.
Уровень техники
В последние годы экзоскелеты нашли разнообразные применения, которые большей частью связаны с биомедицинской и промышленной областями.
В биомедицинской области экзоскелеты проектируются для того чтобы повысить физические и моторные способности индивидуума, дополнительно компенсируя влияние силы тяжести, таким образом снижая физическое усилие и индивидуальную нагрузку. В частности, в биомедицинской области экзоскелеты используются в области восстановления и оказания помощи моторной функции. Восстановление относится к реабилитации пациента, тогда как «помощь» относится к простому случаю помощи, при котором моторные способности пользователя необратимо подорваны.
В промышленной области экзоскелеты используются главным образом в производственной и строительной отраслях промышленности, в которых операторам приходится находиться в неудобных позах или поднимать или передвигать тяжелые грузы; кроме того экзоскелеты также используются как вспомогательное средство для медицинских работников. В общем, в этой промышленной области экзоскелет проектируется для того, чтобы облегчить усилия одной или более частей тела.
В экзоскелетах компенсирование нагрузки осуществляется посредством различных технологий, которые можно классифицировать, как «пассивные» или «активные»: «пассивная» технология компенсации использует набор из одного или более упругих элементов, которые нагружаются во время движения и высвобождают энергию деформации во время движения в противоположном направлении; в отличие от этого «активная» технология компенсации использует привод с двигателем, обычно электрического типа, другие типы приводов могут приводиться в действие пьезоэлектрическими исполнительными механизмами, СПФ («сплавами с памятью формы»), пневматическими приводами или электроактивными полимерами.
К преимуществу пассивной технологии компенсации относится то, что она не требует внешнего источника питания, позволяя получать облегченный, более компактный экзоскелет, который не содержит электронного блока питания. Действительно, пассивные системы компенсации обычно состоят из кинематических цепей упругих элементов, которые поддерживаются деформацией от веса пользователя.
Однако экзоскелеты с пассивной компенсацией не могут обеспечить полную компенсацию нагрузок при любом положении, принятом пользователем, поскольку имеют одну точку равновесия. Кроме того, во время нагружающего движения пользователь должен прикладывать силу для того, чтобы нагрузить упругие элементы.
В отличие от этого технология активной компенсации требует внешнего источника питания, электронного оборудования и управляющей логики. Их недостатком является то, что двигатели электрических приводов объемные, в результате чего такие экзоскелеты тяжелее и менее эргономичны, чем пассивные. Кроме того, в случае высокого потребления энергии экзоскелеты не могут эффективно питаться системой легких и компактных батарей.
По этим причинам, как в промышленной, так и биомедицинской области наиболее распространены экзоскелеты с пассивным типом компенсации.
Примеры систем экзоскелетов и устройств для компенсации гравитационной нагрузки активного типа приведены в документах KR 20160071661, ЕР 3278938 А1, WO 2017161257 и WO 2015106278, которые описывают решения, включающие исполнительные механизмы.
Примеры систем экзоскелетов и устройств для компенсации гравитационной нагрузки пассивного типа приведены в документах KR 20120082221, WO 2015147584, СА 2952403, US 20120184880, СА 2544645, WO 2018165399 A1 и ЕР 2861387, которые включают упругие элементы, также регулируемого типа, предложенные в экзоскелетах и устройствах, которые могут носиться пользователем.
Еще один пример устройства для компенсации гравитационной нагрузки приводится в документе ЕР 3342390 А1, который относится к устройству для поддержания конечности, содержащему элементы пассивной силы, соединенные с носимым элементом, и элементы активной поддержки, активируемые тяговыми исполнительными механизмами с тросиком, приводимым в движение двигателем. Однако устройство, известное из ЕР 3342390 А1, хотя и реализует гибридную структуру между активными и пассивными системами, обладает недостатками и ограничениями использования.
Раскрытие сущности изобретения
Задачей настоящего изобретение является устранение недостатков существующих решений.
Еще одной частной задачей настоящего изобретения является создание устройства, обладающего пониженным потреблением энергии, и которое, таким образом, можно эффективно снабжать энергией также с использованием системы портативных батарей.
Еще одна частная задача настоящего изобретения состоит в обеспечении компенсации переменных нагрузок, в частности гравитационных нагрузок, для любого положения, принятого пользователем.
Еще одна частная задача настоящего изобретения состоит в создании устройства, которое менее объемно, чем полностью активное устройство, так, чтобы получить облегченный и более эргономичный экзоскелет.
Эти и другие задачи решаются посредством использования устройства для компенсации нагрузки и связанного с ним экзоскелета согласно признакам прилагаемой патентной формулы, которая является неотъемлемой частью настоящего описания.
Идея, которая лежит в основе настоящего изобретения, состоит в том, что обеспечить устройство для компенсации нагрузки, содержащее:
- вспомогательное сочленение, выполненное с возможностью ограничения его работы опорной конструкцией;
- главный стержень, содержащий ближний конец, соединенный с требующим помощи сочленением, а также содержащий дальний конец, выполненный с возможностью генерирования в нем механического напряжения под действием приложенной нагрузки;
- вспомогательный стержень, содержащий первый конец и второй конец, причем первый конец шарнирно закреплен на главном стержне для вращения вспомогательного стержня относительно главного стержня, а второй конец выполнен с возможностью перемещения в плоскости, в которой лежит приложенная нагрузка;
- упругий элемент, выполненный с возможностью обеспечения упругой силы, которая действует между вторым концом вспомогательного стержня и дальним концом главного стержня;
- система регулирования, выполненная с возможностью изменения расстояния между вторым концом вспомогательного стержня и требующим помощи сочленением, так чтобы изменять предварительное нагружение упругого элемента;
причем упругий элемент выполнен с возможностью обеспечения упругой силы на основании кинематической конфигурации устройства для компенсации нагрузки, так чтобы компенсировать приложенную нагрузку по ее составляющей, поперечной главному стержню.
Вкратце, устройство для компенсации нагрузки согласно настоящему изобретению разработано с целью полной идентификации и компенсации с минимальным потреблением энергии и объемом воздействия силы, например силы тяжести, которая действует на главный стержень, который представляет точку зацепления устройства для компенсации нагрузки в структуре системы, в которую оно установлено, например: в экзоскелете или в роботизированном манипуляторе.
Устройство для компенсации нагрузки согласно настоящему изобретению также содержит механическую конструкцию, снабженную соответствующими датчиками и логикой управления, в которой предварительно напряженный упругий элемент обеспечивает необходимую компенсирующую силу.
К достоинству настоящего изобретения относится то, что оно позволяет реализовать устройство для компенсации нагрузки, которое реализует гибридную технологию, разработанную для компенсации нагрузок, и которое адаптирует движения пользователя, тем самым гарантируя высокую компактность и низкое потребление энергии.
В частности, устройство для компенсации нагрузки согласно настоящему изобретению позволяет объединить положительные аспекты пассивной и активной технологий внутри уникального устройства, которое может быть масштабировано для любого типа оборудования или экзоскелета.
Достоинством устройства для компенсации нагрузки согласно настоящему изобретению является также то, что оно может использоваться в таких различных областях, как например промышленная робототехника, подъемные или транспортирующие системы, для разработки более компактного и менее энергопотребляющего оборудования.
Предпочтительно, устройство для компенсации нагрузки содержит подвижный регулирующий элемент, связанный с опорной конструкцией. В частности, предпочтительно, подвижный регулирующий элемент обеспечивает систему регулирующего стержня и исполнительного механизма с прямолинейным перемещением, или систему с тросиком или шкивом, приводимым в движение двигателем.
Предпочтительно, упругий элемент по меньшей мере не напрямую соединен со вторым концом вспомогательного стержня. В частности, предпочтительно, устройство для компенсации нагрузки содержит компенсирующий тросик, который соединяет второй конец вспомогательного стержня с упругим элементом, со шкивом вблизи дальнего конца главного стержня.
Устройство для компенсации нагрузки, которое является объектом настоящего изобретения, может применяться к одному или более сочленениям экзоскелета или роботизированного манипулятора, создавая решение, применяемое с несколькими степенями свободы.
Еще одна идея, лежащая в основе настоящего изобретения, состоит в том, чтобы создать экзоскелет, содержащий одно или более устройств для компенсации нагрузки.
Другие характеристики и преимущества будут более очевидны из подробного описания, приведенного ниже, предпочтительных неограничительных вариантов реализаций настоящего изобретения и из зависимых пунктов формулы изобретения, которые очерчивают предпочтительные и обеспечивающие особенные преимущества варианты реализации изобретения.
Краткое описание чертежей
Изобретение иллюстрируется ссылкой на следующие фигуры, приведенные в качестве неограничительных примеров, в которых:
- Фигура 1 иллюстрирует пример верхней конечности, которая держит предмет, к которому приложена нагрузка, вызванная гравитационной силой;
- Фигура 2 иллюстрирует экзоскелет, взаимодействующий с верхней конечностью и содержащий устройство для компенсации нагрузки согласно настоящему изобретению;
- Фигура 3 иллюстрирует первый вариант реализации устройства для компенсации нагрузки согласно настоящему изобретению;
- Фигура 4а и Фигура 4b иллюстрируют приведенные для примера реализации устройства для компенсации нагрузки согласно настоящему изобретению;
- Фигура 5 иллюстрирует второй вариант реализации устройства для компенсации нагрузки согласно настоящему изобретению;
- Фигура 6 иллюстрирует третий вариант реализации устройства для компенсации нагрузки согласно настоящему изобретению;
- Фигура 7 иллюстрирует экзоскелет, включающий таз и поясничный отдел позвоночника и содержащий устройство для компенсации нагрузки согласно настоящему изобретению;
- Фигура 8 иллюстрирует четвертый вариант реализации устройства для компенсации нагрузки согласно настоящему изобретению;
- Фигура 9 иллюстрирует пятый вариант реализации устройства для компенсации нагрузки согласно настоящему изобретению.
На различных фигурах одинаковые элементы будут идентифицироваться одинаковыми ссылочными номерами.
Осуществление изобретения
В предпочтительных вариантах реализации устройство для компенсации нагрузки согласно настоящему изобретению используется для компенсации воздействия гравитационных нагрузок в экзоскелетах и роботизированных манипуляторах. В частности, настоящее изобретение относится к экзоскелетам, применимым ко многим суставам, или сочленениям, человеческого тела, таким как плечевой, тазобедренный, в пользу поясничного отдела позвоночника, колена и роботизированных манипуляторов. Настоящее изобретение будет ссылаться на эти неограничительные применения устройства для компенсации нагрузки согласно настоящему изобретению.
В этом приведенном для примера применении большая часть усилий, требовавшихся для приведения верхней конечности в движение, используется для преодоления гравитационного эффекта, который может быть определен крутящим моментом, действующим на саму руку.
Соответственно, плечо - это сустав, который в основном испытывает механическое напряжение. Экзоскелеты - это устройства, которые разработаны именно для уменьшения усилия пользователя, который носит их, увеличивая его физические возможности. В частности, устройство для компенсации нагрузки согласно настоящему изобретению разработано для включения в состав экзоскелета для верхних, а также нижних конечностей, закрепленного на суставе пользователя. Аналогичные приложения возможны и для роботизированных манипуляторов.
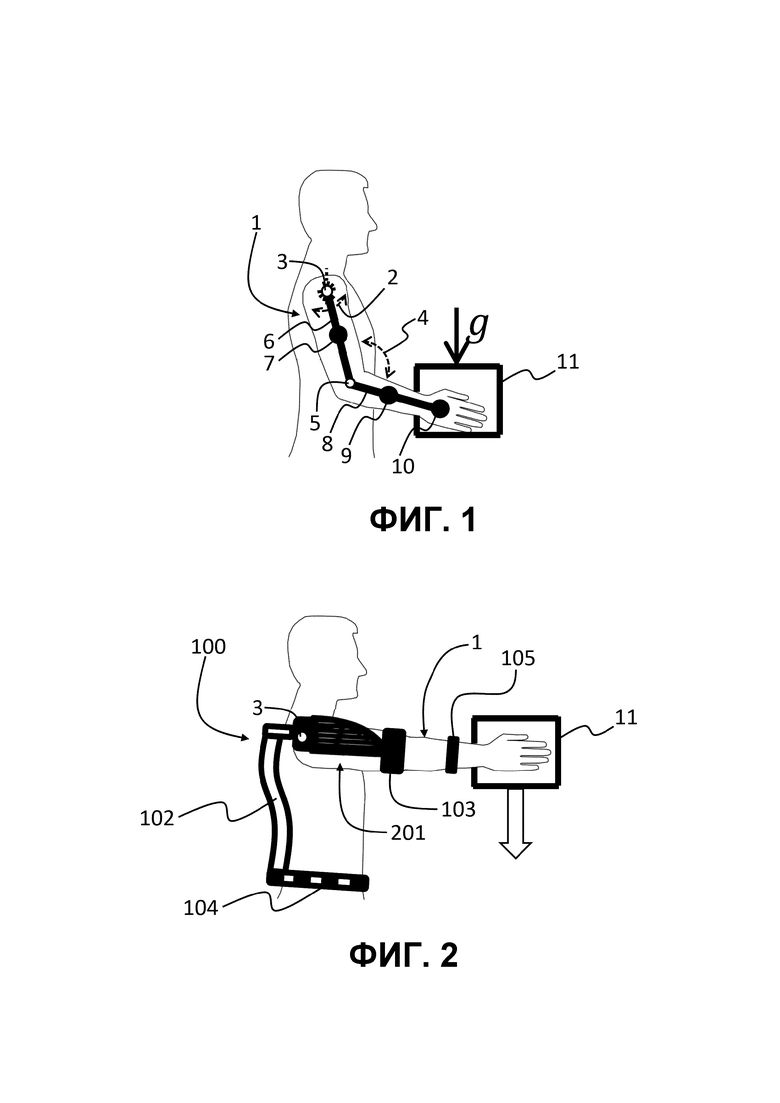
Фигура 1 иллюстрирует пример верхней конечности 1, которая держит предмет 11, к которому приложена нагрузка, вызванная гравитационным ускорением «g».
Нагрузка «g», которая действует на объект 11, становится особенно релевантной для сгибающего-разгибающего движения плеча конечности 1: это случай движения «бери-и-тащи», которое выполняется во многих отраслях промышленности, таких, логистика крупных розничных сетей и в производстве.
Конечность 1 схематически можно представить, как состоящую из жестких тел 6 и 8, груза 11 и масс 7, 9, 10 и 11, соответственно. Стержни 6 и 8 соединяются друг с другом шарниром 5 и прижимаются к земле шарниром 3. Эта система схематически представляет пользователя в вертикальной плоскости. Следовательно, компенсирующий крутящий момент, приложенный к телу 6, который необходим для компенсации гравитационного эффекта, действующего на систему, и который вызывается гравитационным ускорением «g», будет функцией положения, занятого им, в плоскости, идентифицированной углами 2 и 4, геометрических величин стержней 6 и 8 и соответствующих масс 7, 9, 10 и 11. Таким образом гравитационный эффект можно понимать, как результирующий крутящий момент на стержне 6, вызванный силами в виде веса, действующими на центры тяжести тел 7, 9, 10 и 11.
Фигура 2 иллюстрирует экзоскелет 100, взаимодействующий с верхней конечностью 1 и содержащий устройство 201 для компенсации нагрузки согласно настоящему изобретению.
Как уже написано, неограничительным примером применения настоящего изобретения является компенсация гравитационных нагрузок, действующих на верхние конечности во время сгибательного-разгибательного движения плеча, которое является вращательным движением плеча в вертикальной плоскости, как уже проиллюстрировано на Фигуре 1, где стрелка 2 представляет вращение плеча, а «g» - вектор гравитации. В этом случае экзоскелет 100 выполнен с возможностью компенсировать гравитационные нагрузки, которые испытывает плечо пользователя.
Применение устройства 201 для компенсации нагрузки в экзоскелете 100 поясняется примером обеспечения гибридной технологии в случае экзоскелета для верхних конечностей и для деятельности «бери-и-тащи».
Устройство 201 для компенсации нагрузки соединено с опорной конструкцией 102, на которой высвобождаются силы. Компенсирующая сила передается от устройства 201 к конечности через подлокотник 103 во время сгибающего-разгибающего движения плеча, которое осуществляется пользователем вокруг шарнира 3. Ремень 104 предпочтительно содержит электронные компоненты и батареи питания всех активных частей, тогда как полоска 105 содержит датчик для регистрации относительного вращения между рукой и предплечьем.
В общем случае устройство для компенсации нагрузки связано в экзоскелете 100 с батареей для подачи питания к системе регулирования, которая будет описана ниже, с множеством датчиков и по меньшей мере с одним процессором.
В других вариантах реализации устройство для компенсации нагрузки может применяться с роботом или с подъемными устройствами или с погрузочно-разгрузочными устройствами с требующим помощи сочленением, выполненным с возможностью ограничения его работы опорной конструкцией, в которой находится главный стержень, с целью компенсации поперечной составляющей нагрузки, приложенной к главному стержню.
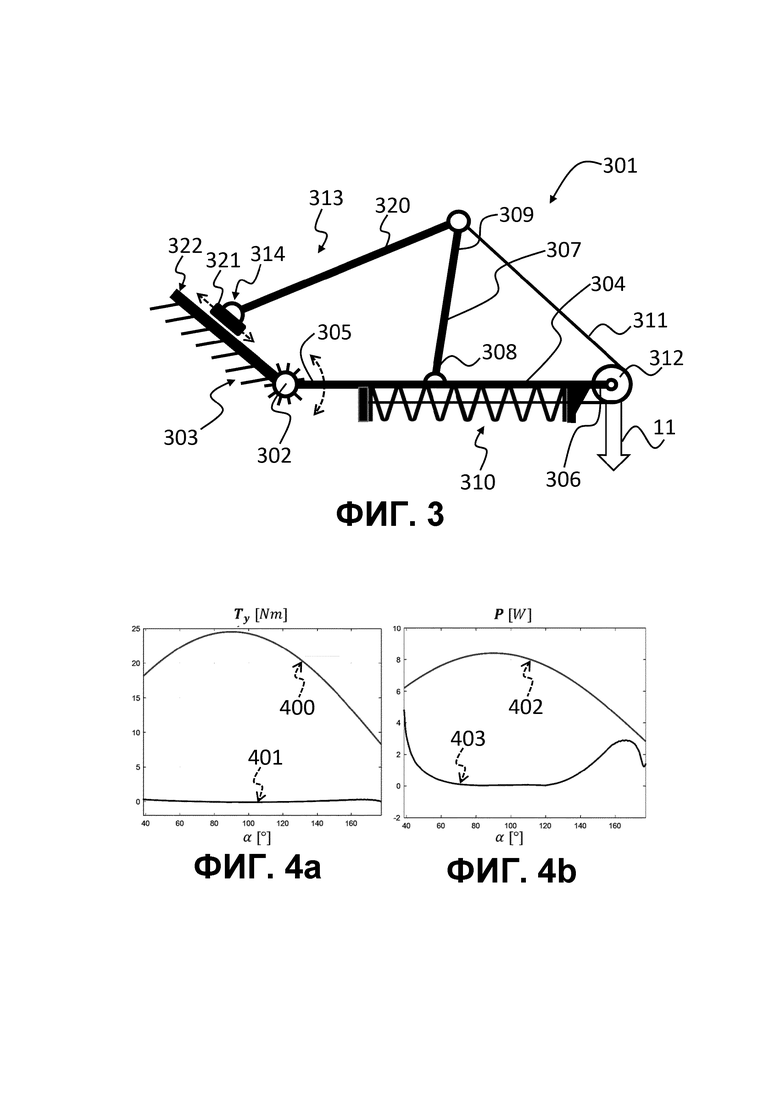
Фигура 3 иллюстрирует первый вариант реализации устройства 301 для компенсации нагрузки согласно настоящему изобретению.
Устройство 301 для компенсации нагрузки, которое в частности выполнено с возможностью компенсации гравитационных нагрузок, содержит требующее помощи сочленение 302, которое выполнено с возможностью ограничения его работы опорной конструкцией 303.
Устройство 301 для компенсации нагрузки дополнительно содержит главный стержень 304, который содержит ближний конец 305, соединенный с требующим помощи сочленением 302, а также дальний конец 306, который выполнен с возможностью генерирования в нем механического напряжения под действием приложенной нагрузки, например уже описанной нагрузки 11.
Устройство 301 для компенсации нагрузки дополнительно содержит вспомогательный стержень 307, содержащий первый конец 308 и второй конец 309. Первый конец 308 шарнирно закреплен на главном стержне 304 для вращения вспомогательного стержня 307 относительно главного стержня 304. Вместо этого второй конец 309 выполнен с возможностью перемещения в плоскости, в которой лежит приложенная нагрузка 11, для компенсации которой установлено устройство 301 для компенсации нагрузки.
В частности, вспомогательный стержень 307 выступает за пределы главного стержня 304 в направлении, противоположном преобладающему направлению приложенной нагрузки 11. В частности, в приведенной для примера конфигурации на Фигуре 3 главный стержень 304 расположен горизонтально, а вспомогательный стержень 307 выступает за пределы главного стержня 304 по существу вертикально и в направлении "вверх", следовательно, на противоположной стороне от преобладающего направления приложенной нагрузки 11, которое ориентировано "вниз".
Предпочтительно, первый конец 308 вспомогательного стержня 307 шарнирно закреплен на главном стержне 304 в промежуточном положении между ближним концом 305 и дальним концом 306 главного стержня 304.
В частности, именно дальний конец 306 главного стержня 304 соответствует скобе подвижного конструктивного элемента, подверженного переменным нагрузкам, таким как уже описанный элемент 103.
В общем случае длина стержней 304 и 307, расстояния между ограничениями и общая кинематическая конфигурация устройства для компенсации нагрузки определяются в зависимости от требуемых характеристик компенсации и энергетических и объемных ограничений всей системы.
Устройство 301 для компенсации нагрузки дополнительно содержит упругий элемент 310, который выполнен с возможностью обеспечения упругой силы, которая действует между вторым концом 309 вспомогательного стержня 307 и дальним концом 306 главного стержня 304.
В предпочтительном варианте реализации упругий элемент 310 содержит винтовую пружину растяжения или сжатия. В одном варианте упругим элементом может быть лента, изготовленная из резины или любого упругого материала, который подходит для этой цели.
Предпочтительно, упругий элемент 310 по меньшей мере непрямо соединен со вторым концом 309 вспомогательного стержня 307.
В предпочтительном варианте реализации, таком, который представлен на Фигуре 3, упругий элемент 310 непрямо соединен со вторым концом 309 вспомогательного стержня 307, в частности, обеспечивая компенсирующий тросик 311, который прямо соединяет второй конец 309 вспомогательного стержня 307 с упругим элементом 310.
Предпочтительно, упругий элемент 310 проходит в осевом направлении и по существу параллельно главному стержню 304; тем самым делая это устройство для компенсации нагрузки более компактным и позволяя устанавливать упругий элемент с повышенной жесткостью. Устройство 301 для компенсации нагрузки дополнительно содержит шкив 312 вблизи дальнего конца 306 главного стержня 304, в котором компенсирующий тросик 311 взаимодействует со шкивом 312.
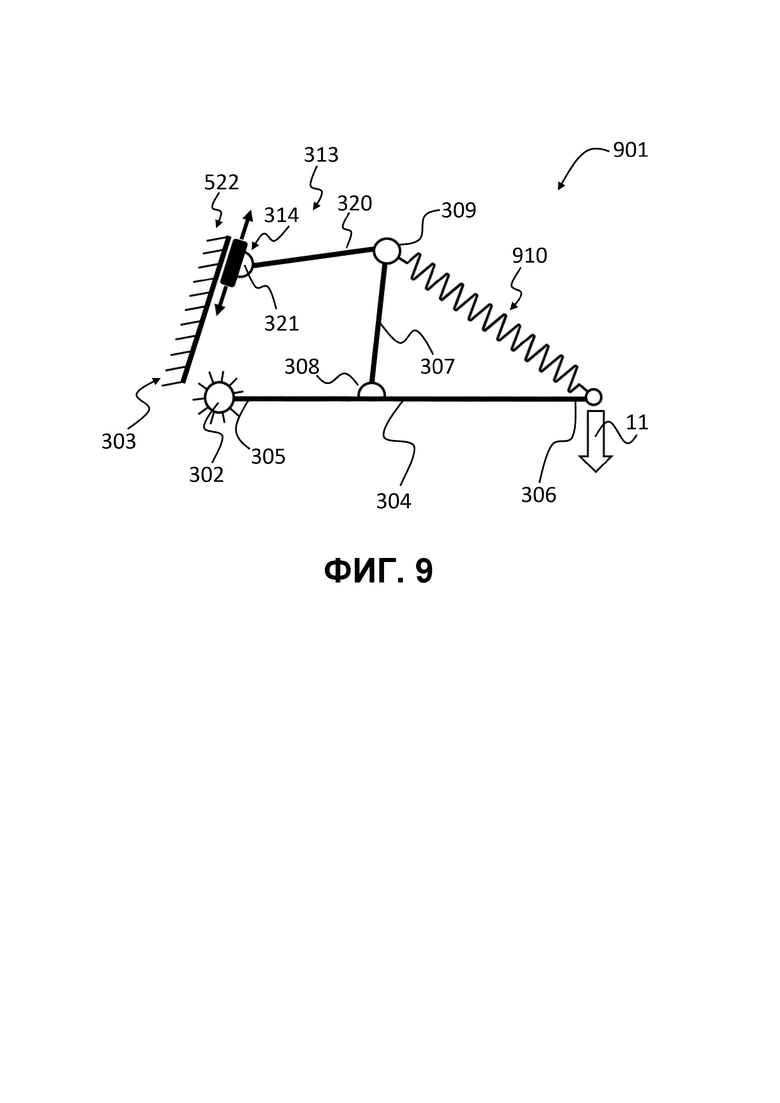
В другом варианте упругий элемент 320 может быть прямо соединен со вторым концом 309 вспомогательного стержня 307, прямо соединяя дальний конец 306 со вторым концом 309, будучи установленным между ними без необходимости компенсирующего тросика, как это будет описано со ссылкой на Фигуру 9.
Устройство 301 для компенсации нагрузки дополнительно содержит систему 313 регулирования, выполненную с возможностью изменения расстояния между вторым концом 309 вспомогательного стержня 307 и требующим помощи сочленением 302 для изменения предварительного нагружения упругого элемента 310.
Упругий элемент 310 выполнен с возможностью обеспечения упругой силы на основании кинематической конфигурации, принятой устройством 301 для компенсации нагрузки, так чтобы компенсировать приложенную нагрузку 11 по ее составляющей, поперечной главному стержню.
В этом смысле система 313 регулирования предпочтительно выполнена с возможностью минимизации разности между поперечной составляющей нагрузки 11, которая должна быть компенсирована, и противоположной поперечной составляющей, обеспечиваемой упругой силой упругого элемента 310.
Устройство 301 для компенсации нагрузки действует по следующему принципу: в любом положении, принятом пользователем (экзоскелетом или роботизированным манипулятором), соответствующая логика управления посредством датчиков и процессоров обрабатывает гравитационный крутящий момент/силу, который(-ая) действует на требующее помощи сочленение 302. Таким образом, они обрабатывают управляющее воздействие, направляемое в систему 313 регулирования таким образом, чтобы последняя изменяла предварительную нагрузку упругого элемента 310 через шарнирную систему рычагов 304 и 307 таким образом, чтобы сила компенсации была равна силе гравитационного воздействия.
В частности, кроме этого устройство 301 для компенсации нагрузки содержит множество датчиков (не показано), выполненных с возможностью измерения абсолютного положения главного стержня 304, а также измерения или получения крутящего момента, который генерирует механическое напряжение в требующем помощи сочленении 302, как результат приложенной нагрузки 11. Кроме того, устройство 301 для компенсации нагрузки также содержит по меньшей мере один процессор (не показан), функционально соединенный с множеством датчиков и системой 313 регулирования, такой процессор выполнен с возможностью расчета предварительного нагружения упругого элемента 310, так чтобы уравновесить крутящий элемент, который генерирует механическое напряжение в требующем помощи сочленении.
Предпочтительно, вышеупомянутый процессор дополнительно выполнен с возможностью модулирования упругой силы, обеспечиваемую упругим элементом 310 в зависимости от динамической траектории, которая измеряется множеством датчиков, для того, чтобы поддерживать движение, которое желательно для пользователя экзоскелета или требуется программированием робота.
Приводится пример процесса регулирования, который может выполняться в любом положении, принятом пользователем в вертикальной плоскости, аналогично процессу, выполняемому логикой управления и датчиками для управления рабочими циклами устройства для компенсации нагрузки 301.
Один приведенный для примера рабочий цикл можно суммировать следующей операционной схемой:
- Датчики производят измерения положения и отправляют их в логику управления;
- Логика управления рассчитывает положение, принятое пользователем, и соответствующий гравитационный эффект, который действует на него, выраженный, как крутящий момент в отношении опорного требующего помощи сочленения 302. Дополнительно, предпочтительно, система управления обрабатывает динамику движения и тип выполняемой траектории;
- Процессор рассчитывает деформацию, которую нужно приложить к упругому элементу 310 для того, чтобы получить крутящий момент, который уравновешивает действие гравитации;
- Процессор обрабатывает управляющее действие, которое должно быть послано в систему 313 регулирования, которая разрешает желательную деформацию упругого элемента 310, обеспечиваемую разрешением кинематики шарнирной системы, состоящей из стержней 304 и 307.
Предпочтительно такое управление выполнено для модулирования силы активирования в зависимости от траектории и динамики, вводимые пользователем при выполнении деятельности, чтобы поддержать намерение пользователя в применении к экзоскелету 100.
Как уже описано, система 313 регулирования выполнена с возможностью изменения расстояния между вторым концом 309 вспомогательного стержня 307 и требующим помощи сочленением 302, так чтобы изменять предварительное нагружение упругого элемента 310. В общем случае, система 313 регулирования дополнительно выполнена с возможностью изменения относительного угла между главным стержнем 304 и вспомогательным стержнем 307.
Для этой цели система 313 регулирования содержит подвижный регулирующий элемент 314, связанный с опорной конструкцией 303.
Предпочтительно система 313 регулирования также содержит регулирующий стержень 320, который соединяет подвижный регулирующий элемент 314 со вторым концом 309 вспомогательного стержня 307. Предпочтительно, подвижный регулирующий элемент 314 содержит исполнительный механизм 321 с прямолинейным перемещением, с которым шарнирно соединен регулирующий стержень 320.
Предпочтительно исполнительный механизм 321 с прямолинейным перемещением выполнен с возможностью перемещения вдоль наклонного элемента 322, закрепленного на опорной конструкции 303.
Фигура 4а и Фигура 4b иллюстрируют приведенные для примера варианты реализации устройства для компенсации нагрузки согласно настоящему изобретению.
В частности, Фигура 4а иллюстрирует сравнение между крутящими моментами на сочленении, которые требуются от пользователя, в зависимости от угла вращения главного стержня 304 вокруг требующего помощи сочленения, без устройства по настоящему изобретению (линия 400) и с устройством 301 для компенсации нагрузки (линия 401).
Можно отметить, что усилие, требуемое от пользователя, в случае использования устройства равно почти нулю (линия 401 для любой величины угла).
В частности, Фигура 4b иллюстрирует другую ситуацию, в которой предполагается, что экзоскелет 100 снабжен двигателем, который управляет вращением требующего помощи сочленения 302 вместо пользователя, приложением крутящего момента, без устройства по настоящему изобретению (линия 402) и с устройством 301 для компенсации нагрузки (линия 403).
Можно отметить, как полная мощность (рассчитанная в предположении постоянной угловой скорости) в случае экзоскелета 100, которая обеспечивается устройством для компенсации нагрузки настоящего изобретения (линия 403), равна почти нулю вдоль всей рабочей области по сравнению с мощностью в случае активного экзоскелета с двигателем, но без устройства по настоящему изобретению (линия 402).
Приведенные в качестве примера характеристики демонстрируют, что устройство для компенсации нагрузки по настоящему изобретению способно почти полностью компенсировать гравитационный эффект во всем рабочем поле с минимальным потреблением энергии.
По этой причине устройство для компенсации нагрузки по настоящему изобретению позволяет использовать облегченный двигатель с уменьшенным потреблением энергии в пользу более легкой и более эффективной системы.
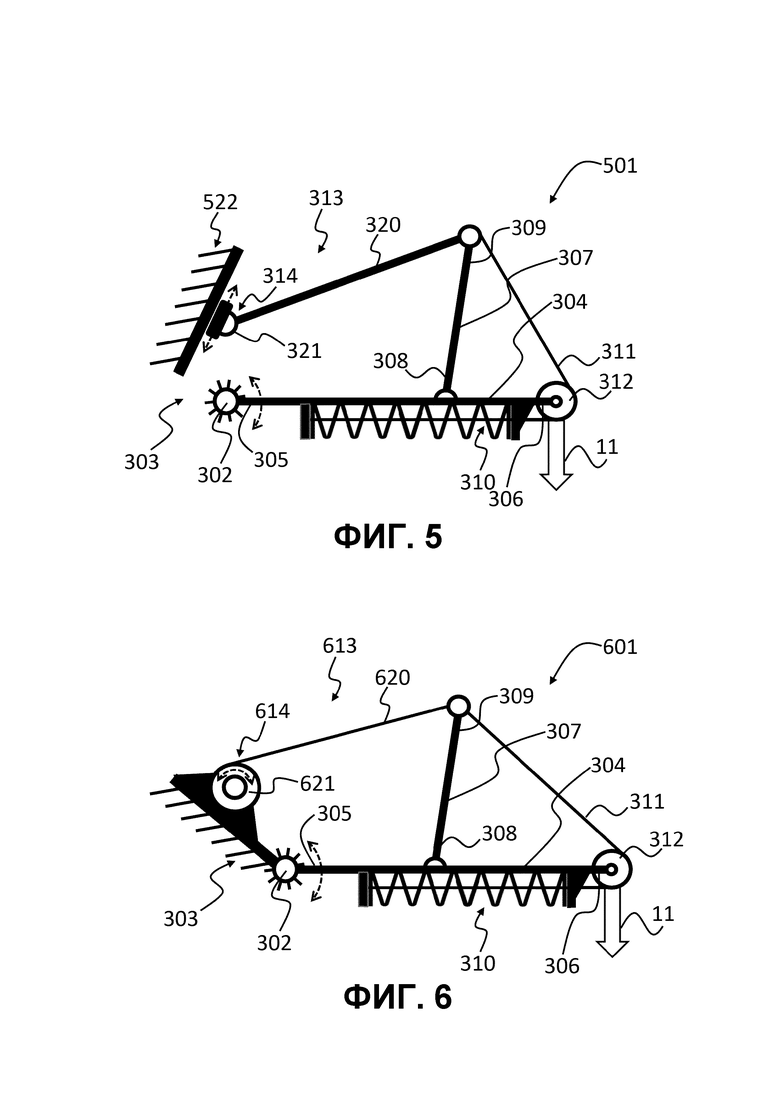
Фигура 5 иллюстрирует второй вариант реализации устройства 501 для компенсации нагрузки согласно настоящему изобретению.
Устройство 501 для компенсации нагрузки по существу состоит из элементов, уже описанных в связи с вариантом 301 реализации, представленным со ссылкой на Фигуру 3.
По сравнению с уже описанным вариантом 301 реализации устройство 501 для компенсации нагрузки обеспечивает различную общую геометрию, предполагающую несколько отличные кинематические характеристики, которые позволяют осуществлять компенсацию нагрузки, пригодную для конкретного использования.
Кроме того, по сравнению с уже описанным вариантом 301 реализации устройство 501 для компенсации нагрузки обеспечивает исполнительный механизм 321 с прямолинейным перемещением, который перемещается на другом наклонном элементе 522, который наклонен по-другому и не соединяется напрямую с требующим помощи сочленением 302, но в любом случае соединяется с опорной конструкцией 303.
Другими словами, устройство 501 для компенсации нагрузки обеспечивает систему 313 регулирования, которая всегда содержит подвижный регулирующий элемент 314, связанный с опорной конструкцией 303, и в которой исполнительный механизм 321 с прямолинейным перемещением выполнен с возможностью перемещения вдоль другого наклонного элемента 522, соединенного с опорной конструкцией, при этом наклон элемента 522 определяется на основании различных кинематических характеристик, требуемых для устройства для компенсации нагрузки 501.
Фигура 6 иллюстрирует третий вариант реализации устройства 601 для компенсации нагрузки согласно настоящему изобретению.
Устройство 601 для компенсации нагрузки по существу содержит элементы, уже описанные в связи с вариантом 301 реализации, представленным со ссылкой на Фигуру 3.
Таким образом, устройство 601 для компенсации нагрузки использует те же самые рабочие принципы, описанные в связи с предыдущими вариантами 301 и 501 реализации, но оно использует внутри гибридной механической структуры другую систему 613 регулирования.
В частности, система 613 регулирования дополнительно содержит тросик 620, который соединяет подвижный регулирующий элемент 614 со вторым концом 309 вспомогательного стержня 307.
В этом варианте реализации системы 613 регулирования подвижный регулирующий элемент 614 содержит шкив 621 с приводом от двигателя, на которой обеспечена возможность наматывания тросика 620 или сматывания с него. Тем самым система 613 регулирования выполнена с возможностью изменения расстояния между вторым концом 309 вспомогательного стержня 307 и требующим помощи сочленением 302 для изменения предварительного нагружения упругого элемента 310. В общем случае система 613 регулирования дополнительно выполнена с возможностью изменения относительного угла между главным стержнем 304 и вспомогательным стержнем 307.
Предпочтительно, шкив 621 с приводом от двигателя находится в фиксированном положении относительно требующего помощи сочленения 302, а второе расстояние между шкивом 621 с приводом от двигателя и требующим помощи сочленением 302 определяется на основании желательных кинематических характеристик устройства 601 для компенсации нагрузки.
Другими словами, в этом варианте реализации системы 613 регулирования исполнительный механизм 321 с прямолинейным перемещением заменяется исполнительным механизмом с вращательным перемещением или двигателем 621, в то время как регулирующий стержень 320 заменяется тросиком 620, который поднимает вверх шкив 621 с приводом от двигателя.
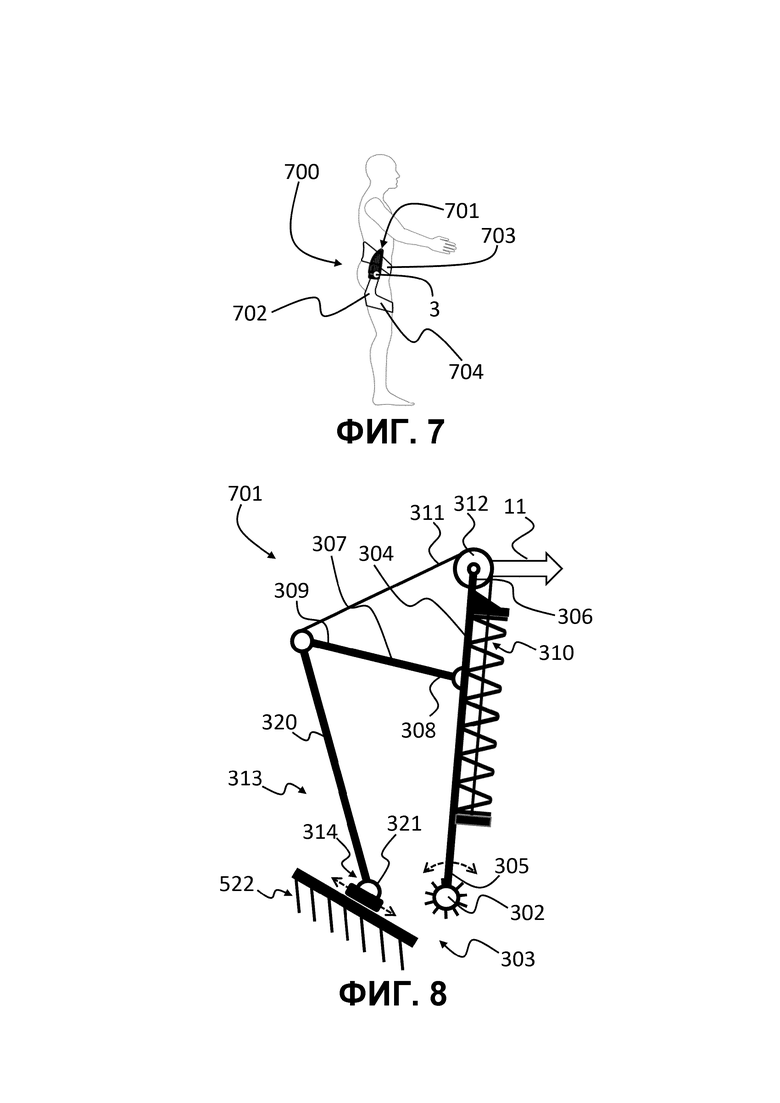
Фигура 7 иллюстрирует экзоскелет 700, взаимодействующий с тазом и поясничным отделом позвоночника, и содержащий устройство 701 для компенсации нагрузки согласно настоящему изобретению.
В этом варианте реализации устройства 701 для компенсации нагрузки оно используется в экзоскелете для поясничного отдела позвоночника.
Устройство 701 для компенсации нагрузки соединяется с опорной конструкцией 702, на которой высвобождаются силы. Компенсирующая сила передается от устройства 701 к конечности через элемент 704 во время движения ноги, выполняемого пользователем вокруг шарнира 3. Сам элемент 704 предпочтительно содержит электронные компоненты и батареи источника питания всех активных частей, в то время как для регистрации относительного вращения между 703 и 704 используются датчики.
В целом, устройство для компенсации нагрузки соединено в экзоскелете с батареей для подачи питания системе регулирования, с множеством датчиков и по меньшей мере одним процессором.
Фигура 8 иллюстрирует четвертый вариант реализации устройства для компенсации нагрузки согласно настоящему изобретению.
Устройство 701 для компенсации нагрузки включается в экзоскелет 700 для облегчения усилия в области поясничного отдела позвоночника. В этом случае один из требующих помощи сочленений 302 - это сустав таза. Опорная конструкция, на которой закрепляется устройство 701 для компенсации нагрузки, состоит из двух частей, одна из которых закрепляется на верхней части ноги и другая закрепляется на тазе.
Устройство 701 для компенсации нагрузки следует той же самой реализации, как уже описанное устройство 501 для компенсации нагрузки.
Фигура 9 иллюстрирует пятый вариант реализации устройства 901 для компенсации нагрузки согласно настоящему изобретению.
Устройство 901 для компенсации нагрузки содержит некоторые элементы, уже описанные в отношении вариантов 301 и 501 реализации, представленных со ссылкой на Фигуру 3 и Фигуру 5.
В частности, устройство 901 для компенсации нагрузки содержит требующее помощи сочленение 302, выполненное с возможностью ограничения его работы опорной конструкцией 303.
Устройство 901 для компенсации нагрузки дополнительно содержит главный стержень 304, содержащий ближний конец 305, соединенный с требующим помощи сочленением 302, и дальний конец 306, выполненный с возможностью генерирования в нем механического напряжения под действием приложенной нагрузки 11.
Устройство 901 для компенсации нагрузки дополнительно содержит вспомогательный стержень 307, содержащий первый конец 308 и второй конец 309. Первый конец 308 шарнирно соединяется с главным стержнем 304 для вращения вспомогательного стержня 307 относительно главного стержня 304. Второй конец 309 выполнен с возможностью перемещения в плоскости, в которой лежит приложенная нагрузка 11.
Устройство 901 для компенсации нагрузки дополнительно содержит упругий элемент 910, выполненный с возможностью обеспечения упругой силы, которая действует между вторым концом 309 вспомогательного стержня 307 и дальним концом 306 главного стержня 304.
В частности, упругий элемент 910 представляет собой пружину растяжения, которая прямо соединяет второй конец 309 с дальним концом 306. В предпочтительном варианте реализации упругий элемент 910 содержит спиральную пружину, но он также может быть лентой, изготовленной из резины или упругого материала, который подходит для этой цели.
В этом варианте пружина растяжения может соединять внешние части стержней 304 и 309, не соединяя их концы напрямую.
Устройство 901 для компенсации нагрузки дополнительно содержит систему 313 регулирования, выполненную с возможностью изменения расстояния между вторым концом 309 вспомогательного стержня 307 и требующим помощи сочленением 302, для того чтобы изменять предварительную нагрузку упругого элемента 910.
Система 313 регулирования предпочтительно соответствует варианту реализации, уже описанному со ссылкой на Фигуру 5, с исполнительным механизмом 321 с прямолинейным перемещением, который перемещается по наклонному элементу 522.
В общем случае, упругий элемент 910 выполнен с возможностью обеспечения упругой силы на основе кинематической конфигурации устройства 901 для компенсации нагрузки, которая определяется положением главного стержня 304 и вспомогательного стержня 307 и предварительным нагружением упругого элемента 910.
При этом устройство 901 для компенсации нагрузки способно компенсировать приложенную нагрузку 11 по ее составляющей, которая поперечна главному стержню 304.
Промышленная применимость
Настоящее изобретение позволяет эффективно компенсировать нагрузки, в частности гравитационные нагрузки.
Устройство для компенсации нагрузки согласно настоящему изобретению может быть интегрировано в экзоскелеты, которые специально разработаны для промышленных применений, в которых пользователь должен выполнять напряженные операции, выполняемые руками или, как правило, с экзоскелетом, одетым на тело, а также как для реабилитации, так и для вспомогательных биомедицинских применений.
В этом смысле устройство для компенсации нагрузки согласно настоящему изобретению, которое встраивается в экзоскелет, позволяет снизить нагрузку в различных суставах, таких как плечевой, коленный, тазобедренный и т.д., а также в поясничном отделе позвоночника.
Кроме того, устройство для компенсации нагрузки согласно настоящему изобретению также может быть встроено в роботизированные манипуляторы.
Учитывая представленное здесь описание, квалифицированный специалист сможет разработать дальнейшие модификации и варианты, для того чтобы удовлетворить случайные и конкретные потребности.
Поэтому описанные здесь варианты реализации следует рассматривать как иллюстративные и неограничительные примеры изобретения.
Группа изобретений относится к медицинской технике, а именно к устройствам для компенсации нагрузки и связанным с ними экзоскелетам. Устройство (201, 301, 501, 601, 701, 901) для компенсации нагрузки содержит: требующее помощи сочленение (3; 302), выполненное с возможностью ограничения его работы опорной конструкцией (102, 104; 303; 702, 704); главный стержень (304), содержащий ближний конец (305), соединенный с указанным требующим помощи сочленением (3; 302), а также содержащий дальний конец (306), выполненный с возможностью генерирования в нем механического напряжения под действием приложенной нагрузки (11); вспомогательный стержень (307), содержащий первый конец (308) и второй конец (309), причем указанный первый конец (308) шарнирно закреплен на указанном главном стержне (304) для вращения указанного вспомогательного стержня (307) относительно указанного главного стержня (304), а указанный второй конец (309) выполнен с возможностью перемещения в плоскости, в которой лежит приложенная нагрузка (11); упругий элемент (310, 910), выполненный с возможностью обеспечения упругой силы, которая действует между указанным вторым концом (309) указанного вспомогательного стержня (307) и указанным дальним концом (306) указанного главного стержня (304); систему (313; 613) регулирования, выполненную с возможностью изменения расстояния между указанным вторым концом (309) указанного вспомогательного стержня (307) и указанным требующим помощи сочленением (3; 302), так чтобы изменять предварительное нагружение указанного упругого элемента (310, 910). Указанный упругий элемент (310, 910) выполнен с возможностью обеспечения указанной упругой силы на основании кинематической конфигурации указанного устройства (201, 301, 501, 601, 701, 901) для компенсации нагрузки, так чтобы компенсировать указанную приложенную нагрузку (11) по ее составляющей, поперечной указанному главному стержню (304). Экзоскелет (100; 700), содержащий по меньшей мере одно устройство (201, 301, 501, 601, 701, 901) для компенсации нагрузки, а также датчики и по меньшей мере один процессор. Техническим результатом является устройство для компенсации нагрузки, позволяющее объединить положительные аспекты пассивной и активной технологий внутри уникального устройства, которое адаптирует движения пользователя, тем самым гарантируя высокую компактность и низкое потребление энергии и которое может быть масштабировано для любого типа оборудования или экзоскелета. 2 н. и 16 з.п. ф-лы, 9 ил.
1. Устройство (201, 301, 501, 601, 701, 901) для компенсации нагрузки, содержащее:
- требующее помощи сочленение (3; 302), выполненное с возможностью ограничения его работы опорной конструкцией (102, 104; 303; 702, 704);
- главный стержень (304), содержащий ближний конец (305), соединенный с указанным требующим помощи сочленением (3; 302), а также содержащий дальний конец (306), выполненный с возможностью генерирования в нем механического напряжения под действием приложенной нагрузки (11);
- вспомогательный стержень (307), содержащий первый конец (308) и второй конец (309), причем указанный первый конец (308) шарнирно закреплен на указанном главном стержне (304) для вращения указанного вспомогательного стержня (307) относительно указанного главного стержня (304), а указанный второй конец (309) выполнен с возможностью перемещения в плоскости, в которой лежит приложенная нагрузка (11);
- упругий элемент (310, 910), выполненный с возможностью обеспечения упругой силы, которая действует между указанным вторым концом (309) указанного вспомогательного стержня (307) и указанным дальним концом (306) указанного главного стержня (304);
- систему (313; 613) регулирования, выполненную с возможностью изменения расстояния между указанным вторым концом (309) указанного вспомогательного стержня (307) и указанным требующим помощи сочленением (3; 302), так чтобы изменять предварительное нагружение указанного упругого элемента (310, 910);
причем указанный упругий элемент (310, 910) выполнен с возможностью обеспечения указанной упругой силы на основании кинематической конфигурации указанного устройства (201, 301, 501, 601, 701, 901) для компенсации нагрузки, так чтобы компенсировать указанную приложенную нагрузку (11) по ее составляющей, поперечной указанному главному стержню (304).
2. Устройство для компенсации нагрузки по п. 1, в котором указанная система (313; 613) регулирования содержит подвижный регулирующий элемент (314; 614), связанный с указанной опорной конструкцией (303).
3. Устройство для компенсации нагрузки по п. 2, в котором указанная система (313) регулирования дополнительно содержит регулирующий стержень (320), который соединяет указанный подвижный регулирующий элемент (314) с указанным вторым концом (309) указанного вспомогательного стержня (307), и в котором
указанный подвижный регулирующий элемент (314) содержит исполнительный механизм (321) с прямолинейным перемещением, с которым шарнирно соединен указанный регулирующий стержень (320).
4. Устройство для компенсации нагрузки по п. 3, в котором указанный исполнительный механизм (321) с прямолинейным перемещением выполнен с возможностью перемещения вдоль наклонного элемента (322; 522), работа которого ограничена указанной опорной конструкцией (303);
причем указанный наклонный элемент (322; 522) имеет наклон, определенный на основании кинематических характеристик указанного устройства (201, 301, 501, 601, 701, 901) для компенсации нагрузки.
5. Устройство для компенсации нагрузки по п. 2, в котором
указанная система (613) регулирования дополнительно содержит тросик (620), который соединяет указанный подвижный регулирующий элемент (614) с указанным вторым концом (309) указанного вспомогательного стержня (307), и в котором
указанный подвижный регулирующий элемент (614) содержит шкив (621) с приводом от двигателя, на который обеспечена возможность наматывания указанного тросика (620) или сматывания с него.
6. Устройство для компенсации нагрузки по п. 5, в котором
указанный шкив (621) с приводом от двигателя находится в фиксированном положении относительно указанного требующего помощи сочленения (302), и в котором
второе расстояние между указанным шкивом (621) с приводом от двигателя и указанным требующим помощи сочленением (302) определено на основании кинематических характеристик указанного устройства (201, 301, 501, 601, 701, 901) для компенсации нагрузки.
7. Устройство для компенсации нагрузки по любому из пп. 1-6, в котором указанная система (313; 613) регулирования дополнительно выполнена с возможностью изменения относительного угла между указанным главным стержнем (304) и указанным вспомогательным стержнем (307).
8. Устройство для компенсации нагрузки по любому из пп. 1-7, в котором указанная система (313; 613) регулирования дополнительно выполнена с возможностью минимизации разности между указанной поперечной составляющей указанной приложенной нагрузки (11) и противоположной поперечной составляющей, обеспеченной указанной упругой силой.
9. Устройство для компенсации нагрузки по любому из пп. 1-8, дополнительно содержащее датчики, выполненные с возможностью измерения абсолютного положения указанного главного стержня (304), а также измерения крутящего момента, действующего на указанное требующее помощи сочленение (3; 302), как результат указанной приложенной нагрузки (11), и дополнительно содержащее по меньшей мере один процессор, функционально соединенный с указанными датчиками и указанной системой (313; 613) регулирования и выполненный с возможностью расчета указанного предварительного нагружения для того, чтобы уравновесить указанный крутящий момент, действующий на указанное требующее помощи сочленение (3; 302).
10. Устройство для компенсации нагрузки по п. 9, в котором указанный процессор дополнительно выполнен с возможностью модулирования указанной упругой силы в зависимости от динамической траектории, измеренной указанными датчиками, с тем, чтобы поддерживать перемещение.
11. Устройство для компенсации нагрузки по любому из пп. 1-10, в котором указанный упругий элемент (310, 910) соединен с указанным вторым концом (309) указанного вспомогательного стержня (307).
12. Устройство для компенсации нагрузки по любому из пп. 1-11, дополнительно содержащее компенсирующий тросик (311), причем указанный компенсирующий тросик (311) соединяет указанный второй конец (309) указанного вспомогательного стержня (307) с указанным упругим элементом (310).
13. Устройство для компенсации нагрузки по п. 12, в котором указанный упругий элемент (310) проходит в осевом направлении и параллельно указанному главному стержню (304), причем указанное устройство (301, 501, 601, 701, 901) для компенсации нагрузки дополнительно содержит шкив (312) вблизи дальнего конца (306) указанного главного стержня (304), а компенсирующий тросик (311) выполнен с возможностью взаимодействия с указанным шкивом (312).
14. Устройство для компенсации нагрузки по любому из пп. 1-13, в котором указанный вспомогательный стержень (307) выступает за пределы указанного главного стержня (304) в направлении, противоположном преобладающему направлению указанной приложенной нагрузки (11).
15. Устройство для компенсации нагрузки по п. 14, в котором указанный первый конец (308) указанного вспомогательного стержня (307) шарнирно соединен с указанным главным стержнем (304) в промежуточном положении между указанным ближним концом (305) и указанным дальним концом (306) указанного главного стержня (304).
16. Устройство для компенсации нагрузки по любому из пп. 1-15, в котором указанный дальний конец (306) указанного главного стержня (304) соответствует скобе подвижного конструктивного элемента (130; 703), подвергающегося воздействию переменных нагрузок.
17. Экзоскелет (100; 700), содержащий по меньшей мере одно устройство (201, 301, 501, 601, 701, 901) для компенсации нагрузки по любому из пп. 1-16, а также содержащий датчики и по меньшей мере один процессор.
18. Экзоскелет по п. 17, дополнительно содержащий по меньшей мере одну батарею для подачи питания к указанной системе регулирования.
| УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА СОРБЕНТА ТИПА КАРБОВЕР-ПСУМ | 2012 |
|
RU2544645C2 |
| US 20150231018 A1, 20.08.2015 | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| TW 201226010 A1, 01.07.2012 | |||
| RU 2019118289 A, 13.06.2019 | |||
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖИВАНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОЙ РУКИ ПОЛЬЗОВАТЕЛЯ | 2018 |
|
RU2762345C2 |

