Настоящее изобретение относится к области машиностроения, а именно к волновым зубчатым передачам, применяемым в редукторах различного рода механизмов, и может быть использовано в силовых приводах грузоподъемных устройств, в приводах вращения полезной нагрузки гражданской и военной наземной техники, в том числе следящих, в высокоточных приборных приводных и отсчетных устройствах самолетной, ракетной и космической техники.
В 1959 году американский инженер С.В. Массер получил патент №2906146 [1] на изобретение волновой передачи, в котором предложил два основных конструктивных варианта волновой передачи - с длинными (фиг. 45 - фиг. 50 патента [1]) и короткими (фиг. 52 и фиг. 53 патента [1]) гибкими колесами. В качестве достоинств передачи он заявил многопарный плоскостной контакт зубьев, находящихся в зацеплении. Исследователи данной передачи поставили под сомнение это заявление. Так как углы между осями симметрии зубьев жесткого и гибкого колес передачи различны из-за разного количества зубьев, то теоретически в передаче, изображенной на фигурах 4-10 патента [1], такой контакт возможен только на двух зубьях, расположенных в точках максимальной деформации. Все остальные зубья имеют или натяг или зазор в зацеплении.
В учебном пособии М.Н. Иванова [2, с. 41] утверждается, что без учета влияния нагрузки передачи в одновременном зацеплении находится лишь небольшая часть зубьев в зоне максимальной деформации, а в книге Е.Г. Гинзбурга [3, с. 45] указано, что коэффициент перекрытия не может быть больше трех, что сразу же определяет низкую теоретическую многопарность в зацеплении.
В настоящее время передачи с коротким гибким колесом применяют в основном как комбинацию волновой зубчатой передачи (ВЗП) и волнового зубчатого соединения (ВЗС). При этом жесткое колесо ВЗП имеет число зубьев большее числа зубьев гибкого колеса на число волн деформации, а жесткое колесо ВЗС имеет число зубьев равное числу зубьев гибкого колеса.
При очевидных преимуществах передач с коротким гибким колесом над передачами с длинным гибким колесом (меньшие осевые размеры редукторов, короткое гибкое колесо в отличие от длинного деформируется только в радиальном направлении) они практически в настоящее время не применяются. В учебном пособии М.Н. Иванова [2, с. 170] утверждается, что в передачах с коротким гибким колесом зацепление ВЗС работает в плохих условиях, с чем связано уменьшение допускаемой нагрузки, снижение коэффициента полезного действия (КПД) и увеличение люфта. Причина в том, что в ВЗС известные формы зубьев гибкого колеса не обеспечивают контакт со впадинами жесткого колеса на всем рабочем участке зацепления: в зоне, близкой к выходу из зацепления, контактируют до трех зубьев. А так как в ВЗП контакт зубьев гибкого колеса с впадинами жесткого колеса осуществляется в зоне максимальной деформации, то рабочие сектора ВЗП и ВЗС не совпадают.
В свою очередь, передачи с длинным гибким колесом также имеют три основных недостатка. Первым недостатком передач с длинным гибким колесом является точечный контакт зубьев в зацеплении, так как гибкое колесо деформируется и в радиальном, и в осевом направлении (торец обода противоположный зубчатому венцу имеет жесткую заделку). Вторым недостатком является наличие изгибающего момента в стыке ножки зуба гибкого колеса с ободом, что создает дополнительные напряжения в материале гибкого колеса. Третьим недостатком является участие длинной оболочки в передаче крутящего момента, что снижает крутильную жесткость передачи.
Многочисленные предложения по улучшению формы зубьев не приводят к коренному улучшению качества передач с длинным гибким колесом.
Анализ зарубежных патентов показал, что в настоящее время и зарубежные изготовители производят волновые передачи только с длинным гибким колесом, но, судя по обилию иностранных патентов на улучшение зацепления волновой передачи, проблема создания рациональной конструкции передачи с длинным гибким колесом до настоящего времени не решена.
Передача с коротким гибким колесом лишена этих трех недостатков, присущих передачам с длинным гибким колесом.
Целью данного изобретения является устранение основного недостатка передач с коротким гибким колесом - низкого КПД ВЗС - за счет обеспечения многопарного линейного контакта зубьев гибкого колеса с зубьями жестких колес ВЗП и ВЗС на всем рабочем участке зацепления.
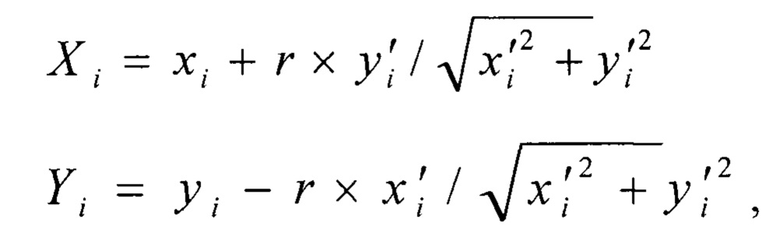
Указанные цели достигаются тем, что гибкое колесо имеет зубья, головки которых имеют форму дуг окружностей, центры которых расположены на его делительном диаметре, а форма поверхностей впадин жестких колес ВЗП и ВЗС рассчитывается по нижеприведенным, универсальным для всех типоразмеров передач, формулам в параметрическом виде:

где r - радиус дуги окружности головки зуба гибкого колеса;
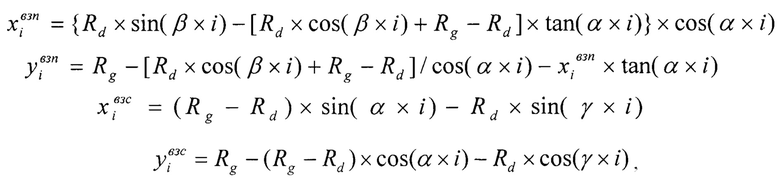
xi и yi - текущие координаты кривых перемещения центров зубьев гибкого колеса относительно центров впадин жестких колес ВЗП и ВЗС в системе координат соответствующих впадин, которые в свою очередь определяются по следующим формулам в параметрическом виде:

где Rd - радиус деформированного участка делительного диаметра гибкого колеса, назначаемый разработчиком;
Rg - радиус делительной окружности жестких колес ВЗП и ВЗС, определяемый расчетом на прочность по общеизвестным формулам расчетов на прочность волновых зубчатых передач в зависимости от действующих нагрузок (для отсчетных передач назначается конструктивно);
α - угол между осями симметрии смежных зубьев жестких колес ВЗП и ВЗС;
β - угол между осями симметрии смежных зубьев деформированного гибкого колеса на рабочем участке зацепления;
γ = β - α;
i - независимый параметр, определяющий текущее положение центров зубьев гибкого колеса относительно центров впадин жестких колес ВЗП и ВЗС.
Необходимо отметить, что ножки зубьев гибкого колеса не контактируют с зубьями жестких колес и могут иметь практически любую конструктивную форму, обеспечивающую работоспособность передачи.
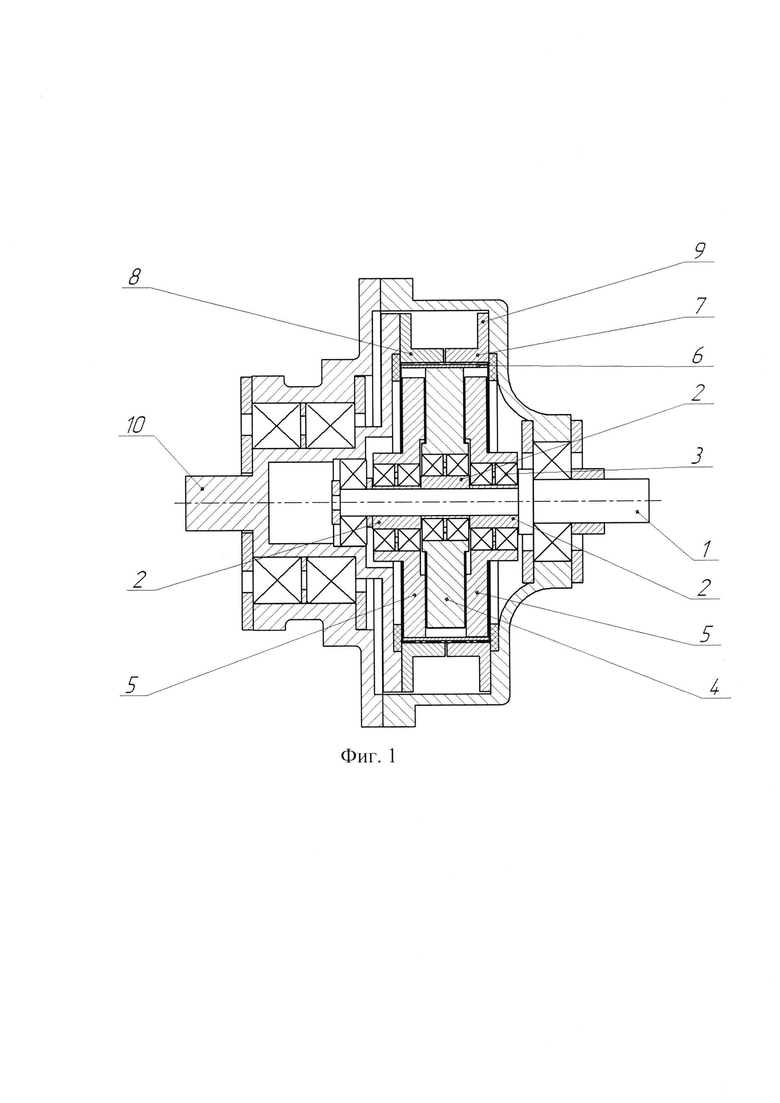
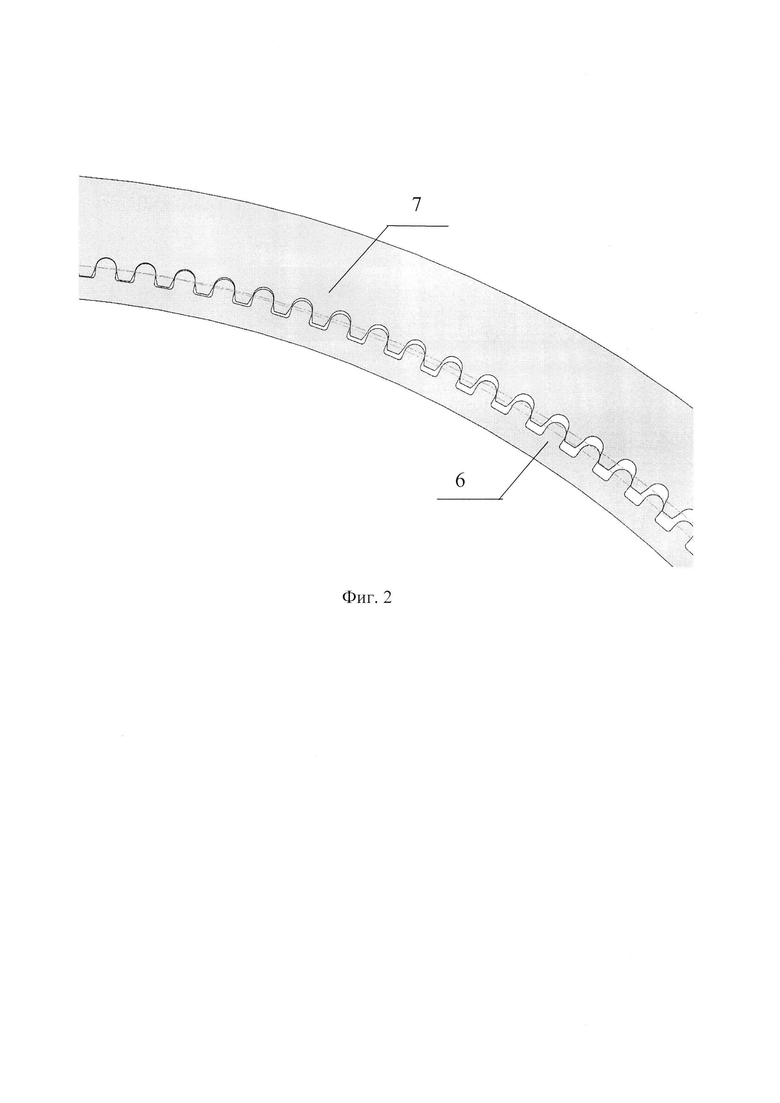
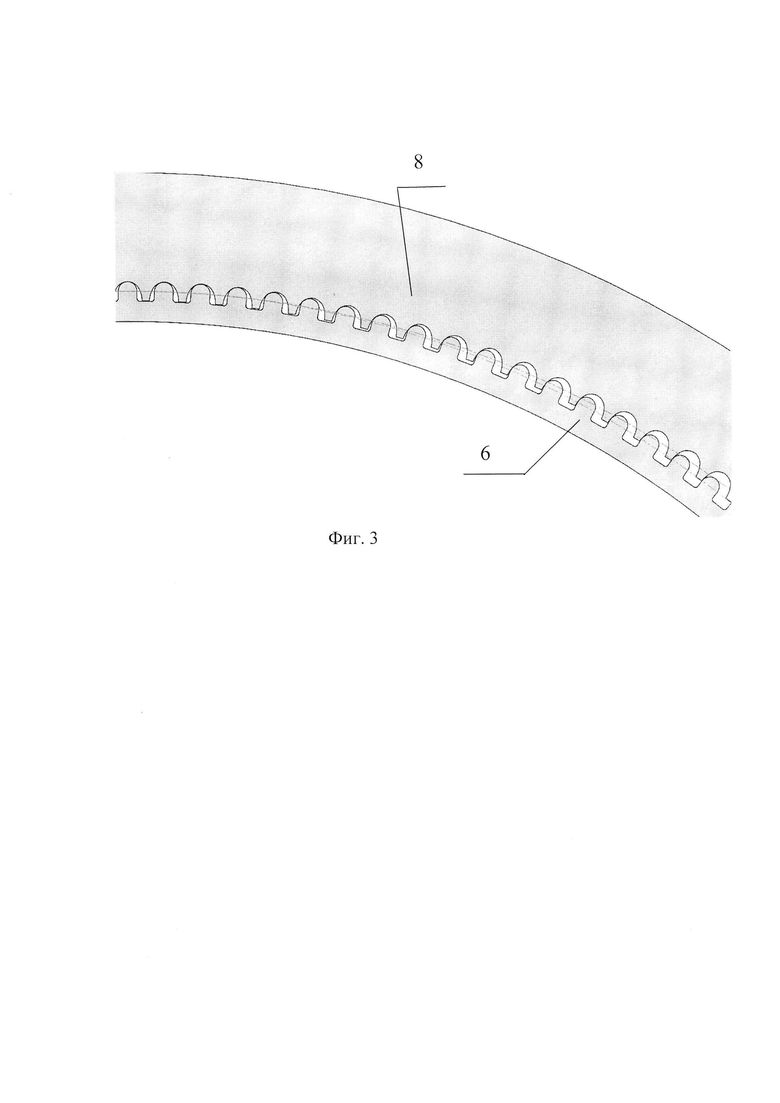
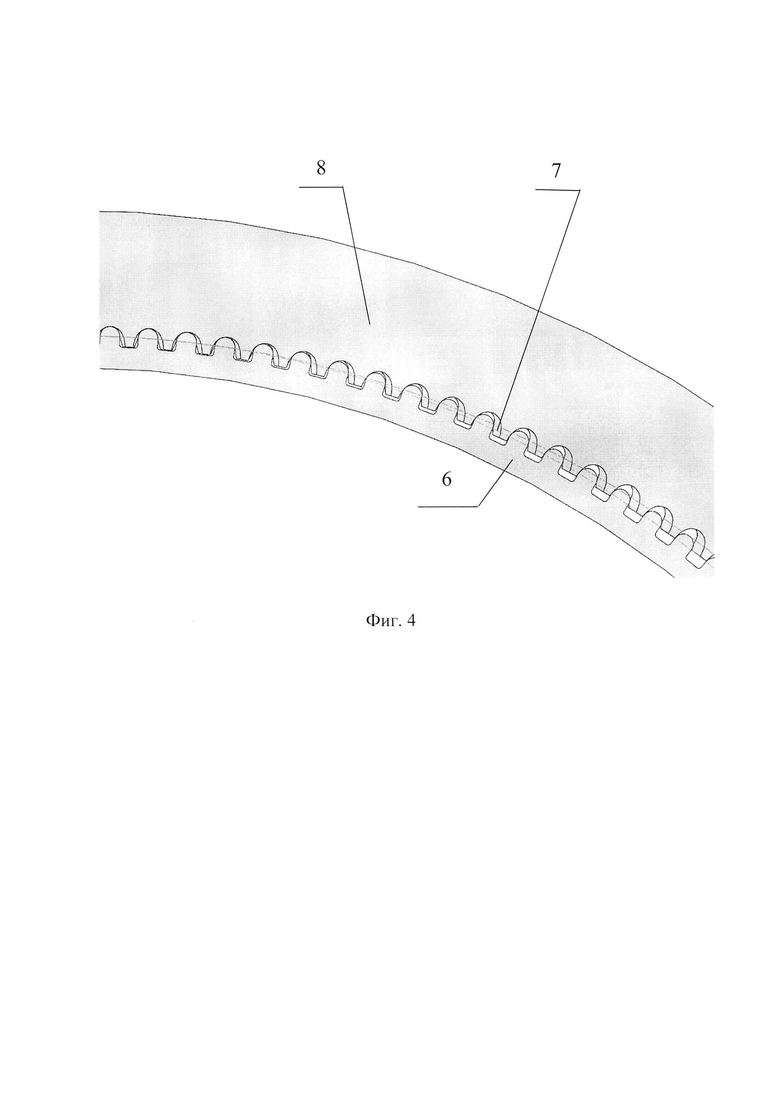
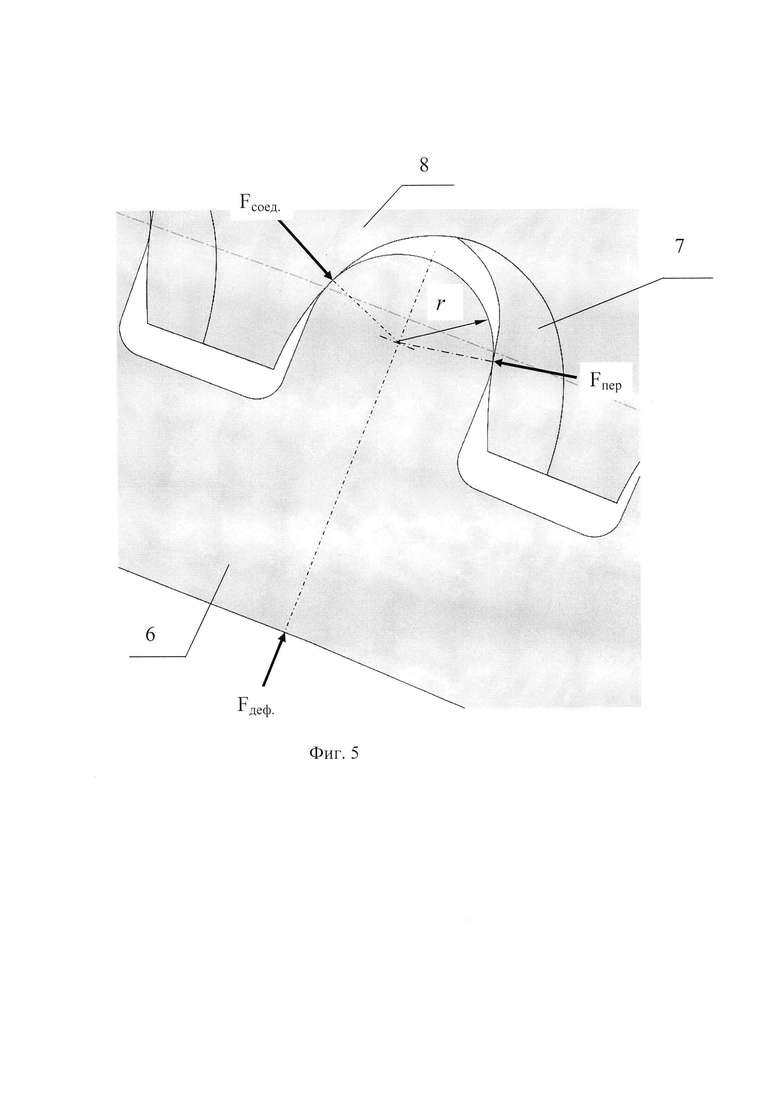
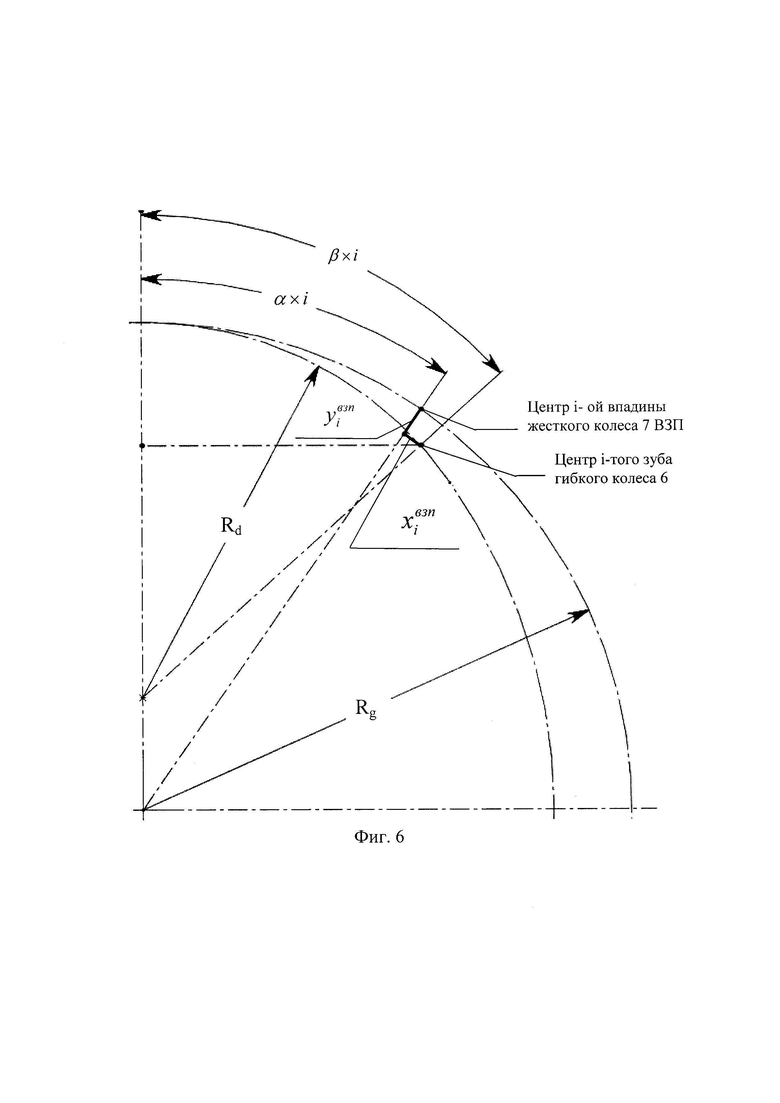
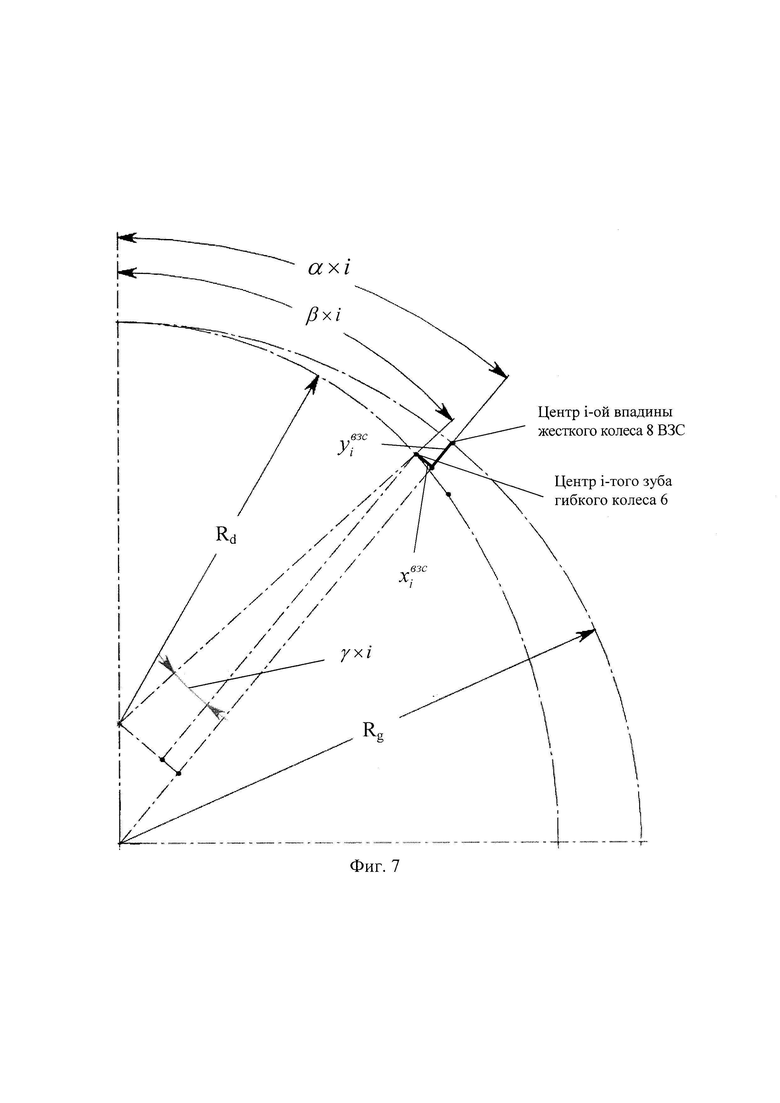
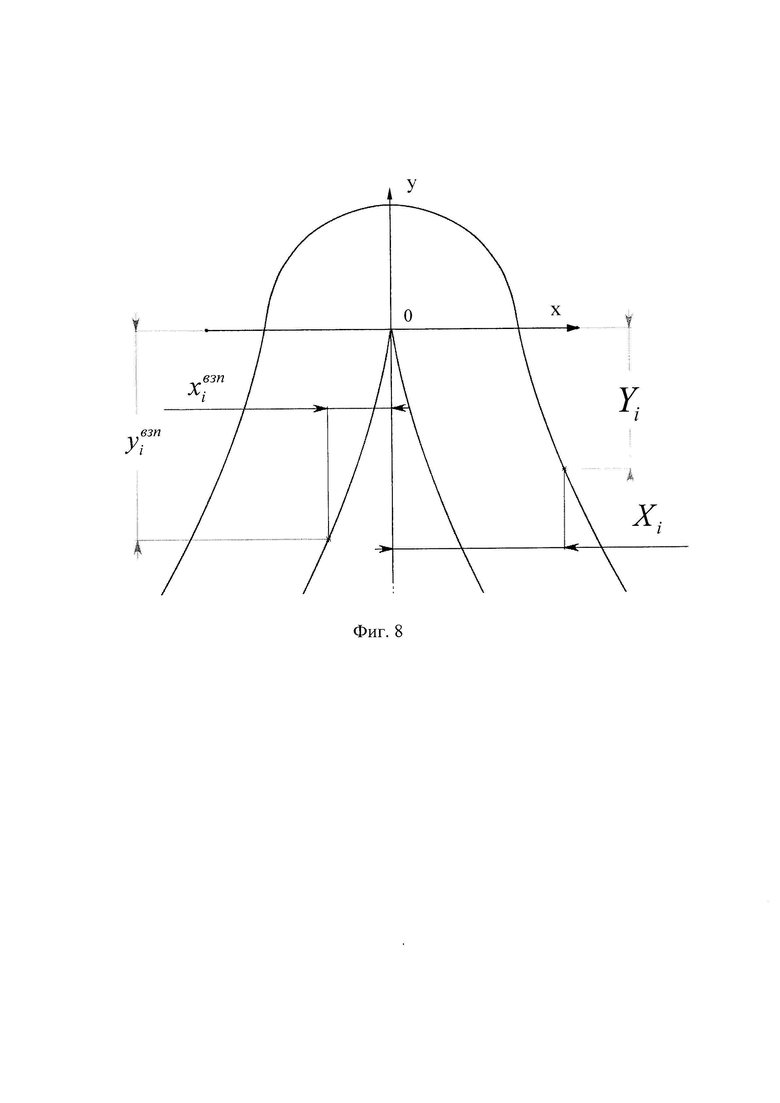
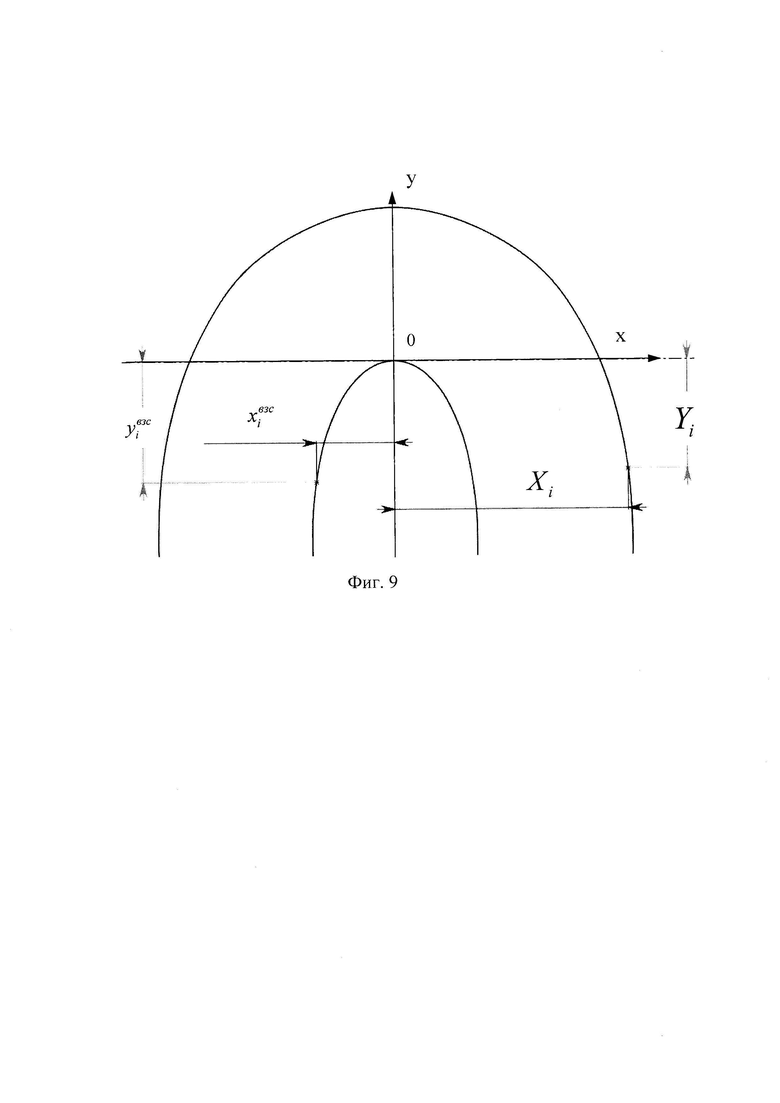
На фиг. 1 представлен разрез редуктора, в котором использована предлагаемая волновая передача. На фиг. 2 представлен вид зацепления гибкого колеса с жестким колесом ВЗП на части рабочего участка зацепления. На фиг.3 представлен вид зацепления гибкого колеса с жестким колесом ВЗС на части рабочего участка зацепления. На фиг. 4 представлен вид зацепления гибкого колеса с обоими жесткими колесами. На фиг. 5 показаны силы, действующие на зуб гибкого колеса в процессе работы редуктора. На фиг. 6 представлена схема взаимного расположения центра зуба гибкого колеса и центра впадины жесткого колеса ВЗП. На фиг. 7 представлена схема взаимного расположения центра зуба гибкого колеса и центра впадины жесткого колеса ВЗС. На фиг. 8 представлены построенные по рассчитанным координатам кривая перемещения центра зуба гибкого колеса относительно центра впадины жесткого колеса и форма впадины жесткого колеса ВЗП. На фиг. 9 представлены построенные по рассчитанным координатам кривая перемещения центра зуба гибкого колеса относительно центра впадины жесткого колеса и форма впадины жесткого колеса ВЗС.
На фиг. 1 показана волновая передача в составе редуктора, состоящая из входного вала 1, на котором закреплены три эксцентричные втулки 2. На втулках 2 установлены подшипники 3. На подшипниках 3 установлены центральный диск 4 и два боковых диска 5. Диски 4 и 5 предназначены для деформации в процессе работы гибкого колеса 6, находящегося в зацеплении с жестким колесом 7 ВЗП и с жестким колесом 8 ВЗС. Жесткое колесо 7 закреплено в корпусе 9. Жесткое колесо 8 закреплено на выходном валу 10.
Схемы взаимного расположения центра зуба гибкого колеса 6 и центров впадин жестких колес 7 ВЗП и 8 ВЗС на рабочих участках зацепления, а также построение формулы относительного перемещения центров зубьев гибкого колеса 6 относительно центров впадин жестких колес 7 ВЗП и 8 ВЗС в системе координат впадин иллюстрируется на фиг. 6 и фиг. 7 соответственно.
Гибкое колесо 6 имеет зубья, головки которых имеют форму дуг окружностей, центры которых расположены на делительном диаметре, а текущие координаты xi и yi кривых перемещения центров зубьев гибкого колеса 6 относительно центров впадин жестких колес 7 ВЗП и 8 ВЗС в системе координат соответствующих впадин определяются по следующим формулам в параметрическом виде:


где Rd - радиус деформированного участка делительного диаметра гибкого колеса 6, назначаемый разработчиком;
Rg - радиус делительной окружности жестких колес 7 ВЗП и 8 ВЗС, определяемый по общеизвестным формулам расчетов на прочность волновых зубчатых передач в зависимости от действующих нагрузок (для отсчетных передач назначается конструктивно);
α - угол между осями симметрии смежных зубьев жестких колес 7 ВЗП и 8 ВЗС;
β - угол между осями симметрии смежных зубьев деформированного гибкого колеса 6 на рабочем участке зацепления;
γ = β - α;
i - независимый параметр, определяющий текущее положение центров зубьев гибкого колеса 6 относительно центров впадин жестких колес 7 ВЗП и 8 ВЗС.
Вид рассчитанной по формулам кривой перемещения центра зуба гибкого колеса 6 относительно центра впадины жесткого колеса 7 ВЗП в системе координат впадины и форма впадины жесткого колеса 7 ВЗП представлены на фиг. 8.
Форма поверхностей впадин жестких колес 7 ВЗП и 8 ВЗС рассчитывается по формулам в параметрическом виде:
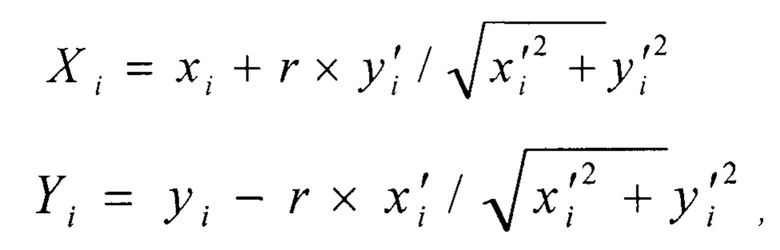
где r - радиус дуги окружности головки зуба гибкого колеса (показан на фиг. 5).
Вид рассчитанной по формулам кривой перемещения центра зуба гибкого колеса 6 относительно центра впадины жесткого колеса 8 ВЗС в системе координат впадины и форма впадины жесткого колеса 8 ВЗС представлены на фиг. 9.
Форма ножек зубьев гибкого колеса выбрана в виде двух параллельных отрезков прямой, касательных к дуге окружности головки зуба. Переход ножек к ободу гибкого колеса 6 оформлен галтелями.
Волновая передача работает следующим образом.
При вращении входного вала 1 диски 4 и 5 деформируют гибкое колесо 6 и перемещают рабочий сектор зацепления в направлении вращения входного вала 1. При этом, как видно на фиг. 2, зубья гибкого колеса 6, скользя по впадинам зубьев жесткого колеса 7 ВЗП, поворачивают гибкое колесо 6 ВЗП в сторону, противоположную вращению входного вала 1. При повороте гибкого колеса 6, как видно на фиг. 3, его зубья, находящиеся в зацеплении с впадинами зубьев жесткого колеса 8 ВЗС, приводят во вращение жесткое колесо 8, которое поворачивает выходной вал 10 в сторону, противоположную вращению входного вала 1. Как видно на фиг. 4, зубья гибкого колеса 6 на всем рабочем участке зацепления находятся в линейном контакте с жесткими колесами 7 ВЗП и 8 ВЗС. Это обеспечивает распределение рабочей нагрузки по всем зубьям, находящимся в зацеплении, что существенно снижает напряжения, действующие в материале гибкого колеса 6. При этом, как видно на фиг. 5, на зуб гибкого колеса 6 действуют три силы Fпер., Fсоед. и Fдеф.. Fпер. - сила действия жесткого колеса 7 ВЗП на гибкое колесо 6. Fсоед. - реакция на силу действия гибкого колеса 6 на жесткое колесо 8 ВЗС. Fдеф. - сила действия дисков 4 или 5 на обод гибкого колеса 6 в точке пересечения оси симметрии зуба гибкого колеса 6 с внутренним диаметром обода. При этом сумма радиальных составляющих сил Fпер. и Fсоед. уравновешивается силой Fдеф.. А тангенциальные составляющие сил Fпер. и Fсоед. уравновешивают друг друга. Поэтому, в отличие от передач с длинными гибкими звеньями, зубья гибкого колеса 6 не создают крутящего момента между ножками зубьев и ободом гибкого колеса 6. Силовой поток от входного вала 1 до выходного вала 10 замыкается через зубья гибкого колеса 6 и жесткие колеса 7 ВЗП и 8 ВЗС. Обод гибкого колеса 6 при этом испытывает незначительные нагрузки деформации его дисками 4 и 5. Этот фактор существенно повышает ресурс волновой передачи.
Таким образом, зубья гибкого колеса 6 и жестких колес 7 ВЗП и 8 ВЗС имеют многопарный линейный контакт на всем рабочем участке зацепления, чем обеспечивается равномерное распределение нагрузок на зубья и повышение КПД ВЗС, что устраняет основные недостатки передач с коротким гибким колесом.
СПИСОК ЛИТЕРАТУРЫ
1. Патент США на изобретение №2906143 «Напряженная волновая передача», МПК F16J 15/50, публ. 29.09.1959.
2. М.Н. Иванов, Волновые зубчатые передачи, Москва, «Высшая школа», 1981 год.
3. Е.Г. Гинзбург, Волновые зубчатые передачи, Ленинград, «Машиностроение», 1969 год.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗУБЧАТАЯ ШАРНИРНО-РОЛИКОВАЯ ПЕРЕДАЧА | 1999 |
|
RU2177090C2 |
| ЗУБЧАТАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 1991 |
|
RU2051299C1 |
| СДВОЕННАЯ ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2015 |
|
RU2655578C1 |
| Способ упрочнения зубьев гибких зубчатых колес | 1989 |
|
SU1757804A1 |
| СДВОЕННАЯ ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2015 |
|
RU2659276C1 |
| Зубчатая передача с гибкой связью | 1984 |
|
SU1280245A1 |
| ВОЛНОВАЯ ПЕРЕДАЧА ДИСКРЕТНОГО ДВИЖЕНИЯ | 2015 |
|
RU2588560C1 |
| Волновая зубчатая передача | 1977 |
|
SU750182A1 |
| ВОЛНОВАЯ ПЕРЕДАЧА | 2017 |
|
RU2728990C1 |
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2023 |
|
RU2806719C1 |
Изобретение относится к области машиностроения. Волновая передача состоит из комбинации волновой зубчатой передачи и волнового зубчатого соединения, содержит жесткое колесо волновой зубчатой передачи и жесткое колесо волнового зубчатого соединения, находящиеся в зацеплении с коротким гибким колесом, имеющим зубья, головки которых имеют форму дуг окружностей, центры которых расположены на делительном диаметре. Форма поверхностей впадин жестких колес волновой зубчатой передачи и волнового зубчатого соединения обеспечивает многопарный линейный контакт зубьев гибкого колеса с зубьями жестких колес волновой зубчатой передачи и волнового зубчатого соединения на всем рабочем участке зацепления. Обеспечивается равномерное распределение нагрузок на зубья и повышение коэффициента полезного действия волнового зубчатого соединения. 1 з.п. ф-лы, 9 ил.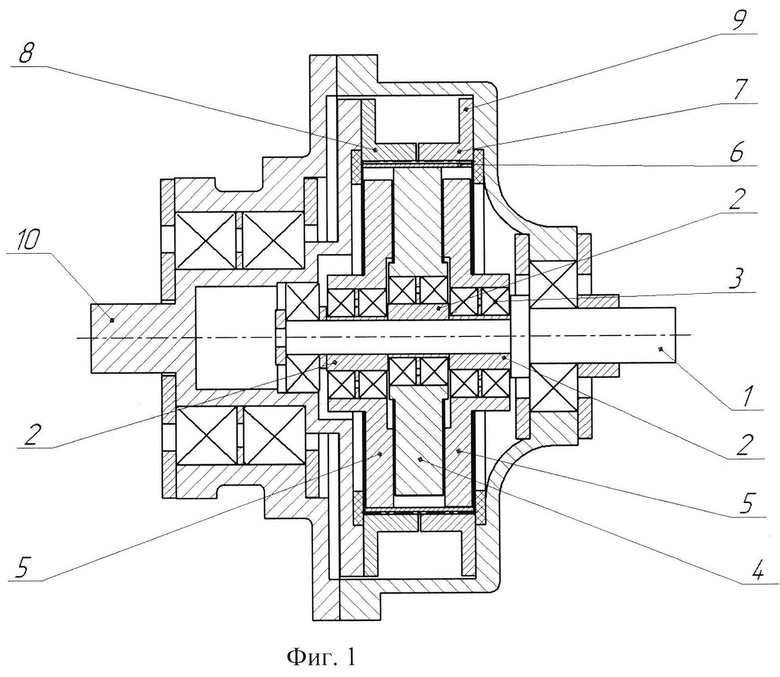
1. Волновая передача, состоящая из комбинации волновой зубчатой передачи и волнового зубчатого соединения, содержит жесткое колесо волновой зубчатой передачи и жесткое колесо волнового зубчатого соединения, находящиеся в зацеплении с коротким гибким колесом, которое деформируется дисковым или аналогичным ему по форме кривой деформации на рабочем участке кулачковым генератором волн, отличающаяся тем, что гибкое колесо имеет зубья, головки которых имеют форму дуг окружностей, центры которых расположены на делительном диаметре, а форма поверхностей впадин жестких колес волновой зубчатой передачи и волнового зубчатого соединения рассчитывается по нижеприведенным универсальным для всех типоразмеров передач формулам в параметрическом виде:
где r - радиус дуги окружности головки зуба гибкого колеса;
xi и yi - текущие координаты кривых перемещения центров зубьев гибкого колеса относительно центров впадин жестких колес волновой зубчатой передачи и волнового зубчатого соединения в системе координат соответствующих впадин, которые, в свою очередь, определяются по следующим формулам в параметрическом виде:
где Rd - радиус деформированного участка делительного диаметра гибкого колеса, назначаемый разработчиком;
Rg - радиус делительной окружности жестких колес волновой зубчатой передачи и волнового зубчатого соединения, определяемый расчетом на прочность по общеизвестным формулам расчетов на прочность волновых зубчатых передач в зависимости от действующих нагрузок (для отсчетных передач назначается конструктивно);
α - угол между осями симметрии смежных зубьев жестких колес волновой зубчатой передачи и волнового зубчатого соединения;
β - угол между осями симметрии смежных зубьев деформированного гибкого колеса на рабочем участке зацепления;
γ = β - α;
i - независимый параметр, определяющий текущее положение центров зубьев гибкого колеса относительно центров впадин жестких колес волновой зубчатой передачи и волнового зубчатого соединения.
2. Волновая передача по п. 1, отличающаяся тем, что ножки зубьев гибкого колеса не контактируют с зубьями жестких колес волновой зубчатой передачи и волнового зубчатого соединения и могут иметь практически любую конструктивную форму, обеспечивающую работоспособность передачи.
| Волновая зубчатая передача | 1974 |
|
SU638770A1 |
| Волновая зубчатая передача | 1977 |
|
SU750182A1 |
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2011 |
|
RU2486388C2 |
| KR 19890005419 A, 13.05.1989. | |||

