Изобретение относится к области транспортирования средств на воздушной подушке, которые с помощью беспилотных летательных аппаратов (далее - БПЛА) предназначены для обнаружения цели и доставки малокалиберных боеприпасов типа снаряда ВОГ-17 для поражения живой силы противника и стационарных огневых средств, расположенных как на открытых участках, так и скрывающихся за естественным рельефом местности или искусственными преградами.
Целью данного изобретения является новое устройство, позволяющее с помощью малогабаритного БПЛА, не управляемого оператором, а движущимся автономно по заданным координатам цели, доставлять малокалиберные боеприпасы до места (объекта) назначения в условиях выполнения боевой задачи по поражению живой силы противника и стационарных огневых средств (опорных пунктов противника).
Одним из известных аналогов заявленного изобретения является БПЛА вертикального взлета и посадки, включающий в себя корпус, состоящий из верхней и нижней частей, жестко соединенных с корпусом четырех лучей с одним электромотором на конце каждого луча с несущим винтом на моторе, автопилота, четырех регуляторов оборотов, камеры высокого разрешения, приемника радиоуправления и антенны приема-передачи сигнала, связанных с аккумуляторной батареей, при этом дополнительно содержит расположенное на борту оборудование: для обнаружения препятствий в горизонтальной плоскости полета используются четыре инфракрасных дальномера, два из них направлены по фронту, два - по бокам; лазерный дальномер, направленный вниз к подстилающей поверхности; навигационную камеру с широким углом обзора; инфракрасную камеру глубины; бортовой вычислитель; блок фронтальной подсветки; что позволяет беспилотному летательному аппарату совершать полет по заранее заданной беспилотному летательному аппарату совершать полет по заранее заданной программе, в соответствии с разработанным алгоритмом, внутри закрытого объекта - топки котла тепловой электростанции [1].
Также известно изобретение, заключающееся в том, что БПЛА для поисковых и спасательных операций содержит встроенный микропроцессор и соединенные с ним встроенные модуль определения пространственных координат и модуль связи, при этом корпус БПЛА имеет разъемы, обеспечивающие возможность зарядки его аккумуляторов, и выполнен с возможностью одновременной фиксации и подключения к микропроцессору видеокамеры высокого разрешения, инфракрасной камеры ночного видения, неохлаждаемой тепловизионной камеры, аудиорегистратора направленного действия, сканирующего лидара, модуля обнаружения сигнала сотового телефона, модуля обнаружения пассивного радиочастотного маячка, модуля обнаружения активного лавинного биппера, подповерхностного радиолокатора и биорадиолокатора [2].
Кроме того, известно изобретение БПЛА самолетного типа для обнаружения пропавшего человека содержит встроенную бортовую вычислительную систему, модуль определения пространственных координат, модуль связи, аудиорегистратор, при этом корпус БПЛА выполнен с возможностью одновременной фиксации и подключения к бортовой вычислительной системе камеры наблюдения, при этом дополнительно содержит два громкоговорителя, усилитель звукового сигнала, две антенны F - типа, радиомодуль передачи данных с компьютера и звукового сигнала с аудиорегистратора, интерфейс питания, при этом бортовая вычислительная система представлена обрабатывающим одноплатным компьютером со сверхточной нейронной сетью, к которому подключен радиатор воздушного охлаждения, и которые расположены в монолитном корпусе БПЛА, при этом обрабатывающий одноплатный компьютер подключен через интерфейс питания к распаечной коробке, имеет возможность соединения с камерой наблюдения в виде беззеркальной фотокамеры и радиомодулем передачи данных с компьютера и звука с аудиорегистратора в виде высокочувствительного микрофона, жестко закрепленного на одном крыле, край которого выполнен с нанесением виброгасящего и шумоизолирующего покрытий и имеет возможность соединения с радиомодулем передачи данных с компьютера и звука, два громкоговорителя соосно жестко закреплены в нижней части корпуса БПЛА, каждый находится в пластиковом корпусе со степенью защиты IP55 и имеет соединение с усилителем звукового сигнала, который соединен с распаечной коробкой, между громкоговорителями размещен парашютный люк с системой парашютной посадки, модуль определения пространственных координат выполнен с антенной GPS/Glonass приемника и имеет возможность соединения с полетным контроллером, модуль связи выполнен в виде радиомодуля телеметрии и управления беспилотного летательного аппарата, закреплен на расположенной во внутренней части корпуса 3D печатной платформе из ABS-пластика и имеет соединение с полетным контроллером, антенны выполнены медными F-типа, работающими на частоте 860-980 МГц, одна из которых имеет соединение с радиомодулем телеметрии и управления беспилотного летательного аппарата, другая имеет соединение с радиомодулем передачи данных с компьютера и звукового сигнала с микрофона, каждая закреплена на съемной текстолитовой площадке, бортовой обрабатывающий одноплатный компьютер и беззеркальная фотокамера установлены на съемную карбоновую площадку, которая крепится по центру внешнего корпуса БПЛА, распаечная коробка выполнена из ABS пластика, в которую установлен полевой транзистор, беззеркальная фотокамера соединена распаечной коробкой с полетным контроллером [3].
Недостатком рассмотренных технических решений аналогов является наличие в составе БПЛА видеокамер, предназначенных для контроля процесса полета и выполнения функций по предназначению, а также различных модулей и датчиков, усложняющих конструктивные особенности устройств, тем самым, значительно увеличивая себестоимость изделия и его габаритные размеры, уменьшая маскирующие способности устройства.
Наиболее близким аналогом к заявленному изобретению по совокупности признаков и принятого за прототип является боеприпас с совмещением режимов обнаружения и поражения цели, включающий боевую часть осколочно-фугасного действия с взрывателем и видеокамерой и несущую часть, в стенке корпуса несущей части предусмотрены четыре паза, в которых до запуска размещаются четыре раскладные опоры с электродвигателями и винтами, в корпусе несущей части размещены элементы управления боеприпасом и источник питания, на хвостовике корпуса несущей части выполнена камера сгорания с капсюлем- воспламенителем, наполненная пороховым метательным зарядом, с внешним профилем под форкамеру ствола гранатомета, при этом дополнительно боевая часть закреплена на несущей части электромеханическим размыкателем, камера сгорания выполнена сменной, боеприпас снабжен дополнительной видеокамерой, размещенной на торце корпуса несущей части, выполненной с возможностью работы при отделении боевой части [4].
Все вышеперечисленные недостатки известных технических решений присущи и прототипу. Кроме того, необходимо отметить, что основным недостатком рассмотренного технического решения прототипа является тот факт, что система управление аппаратом содержит модуль спутниковой навигации и передатчик сигналов, подверженных воздействию объектов подавления сигналов радиоуправления и GSM навигации, что способствует перехвату управления БПЛА противником. Также отсутствует автономность (без участия человека) управления (полный цикл действий, начиная от запуска, вплоть до поражения цели противника) БПЛА, т.е. необходимо привлечение оператора и его помощника, что, в свою очередь, требует дополнительных трудозатрат, и создаются небезопасные условия выполнения боевой задачи.
Сущность изобретения заключается в надежной и достоверной доставке малокалиберного боеприпаса типа снаряда ВОГ-17 до цели противника с помощью автономного БПЛА (далее - АБПЛА) («дрон-камикадзе»), в применении средств лазерного сканирования местности, позволяющие осуществлять автономный полет без участия в управлении оператора путем самостоятельной ориентации БПЛА в пространстве по топологической карте, предварительно загруженной на USB-флеш-накопителе, и отказ от иных средств ориентации в полете за счет исключения возможности воздействовать на него средствами подавления сигналов радиоуправления и GSM-навигации противника.
Технический результат изобретения состоит в применении высокопрочного полимерного материала типа Aerotex, из которого изготовлена несущая часть корпуса АБПЛА, легкий и прочный материал с высочайшей спайкой между слоями и минимальной усадкой, имеющий ряд преимуществ в сравнении с другими полимерами, таких как меньшая масса при том же объеме, высокие прочностные характеристики и простота при использовании его в технологии 3D-печати. Одним из элементов системы управления АБПЛА, помимо микропроцессора, являются три лидара, выполняющих функции средств лазерного сканирования местности. В основе работы лидаров лежит технология, включающая в себя излучение света лазером и последующую регистрацию времени отраженного луча фотоприемным устройством. Для маневренного движения АБПЛА применяется автомат перекоса, необходимый для корректировки подъемной силы лопастей воздушных винтов, регулируя, тем самым, их положение в каждой точке движения, задавая необходимое поступательное движение по пяти направлениям в пространстве: прямо, вверх, вниз, влево и вправо. Электропитание АБПЛА осуществляется с помощью двух графеновых аккумуляторов, отличающихся от Li-ионной большей емкостью при том же объеме и увеличенной скоростью подзарядки.
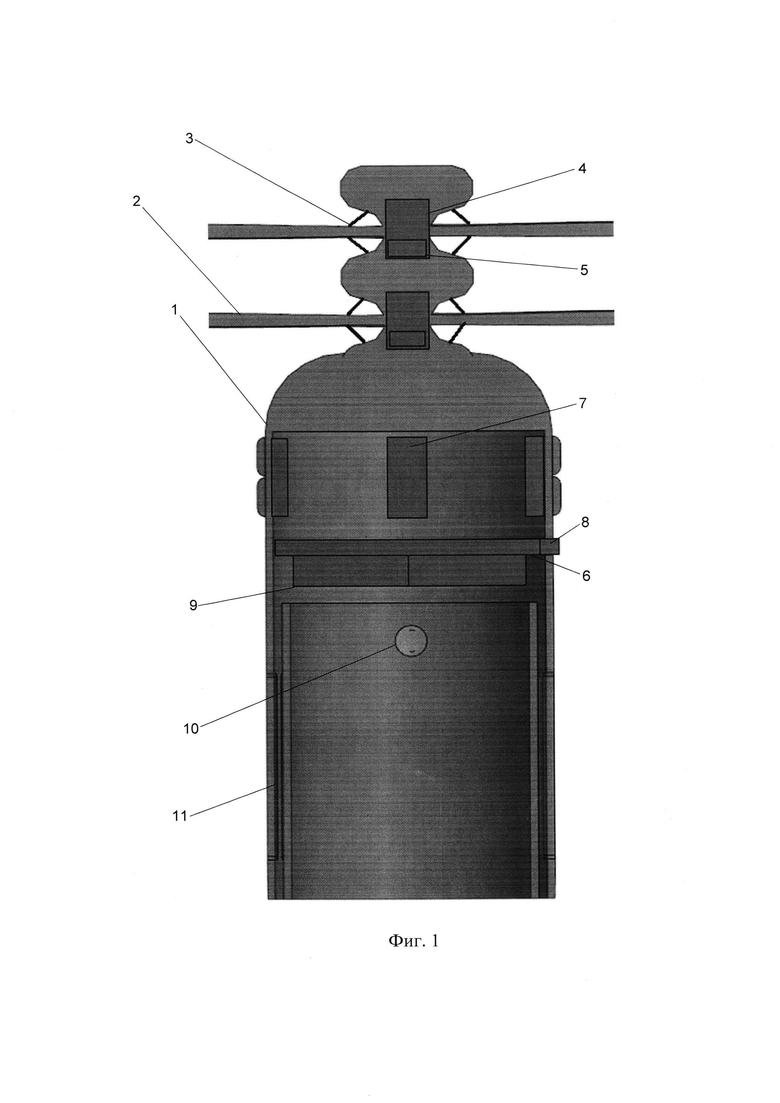
На фиг. 1 изображен АБПЛА для доставки малокалиберных боеприпасов до цели в разрезе.
На фиг. 2 изображен вид сбоку АБПЛА для доставки малокалиберных боеприпасов до цели.
На фиг. 3 изображен вид сверху АБПЛА для доставки малокалиберных боеприпасов до цели.
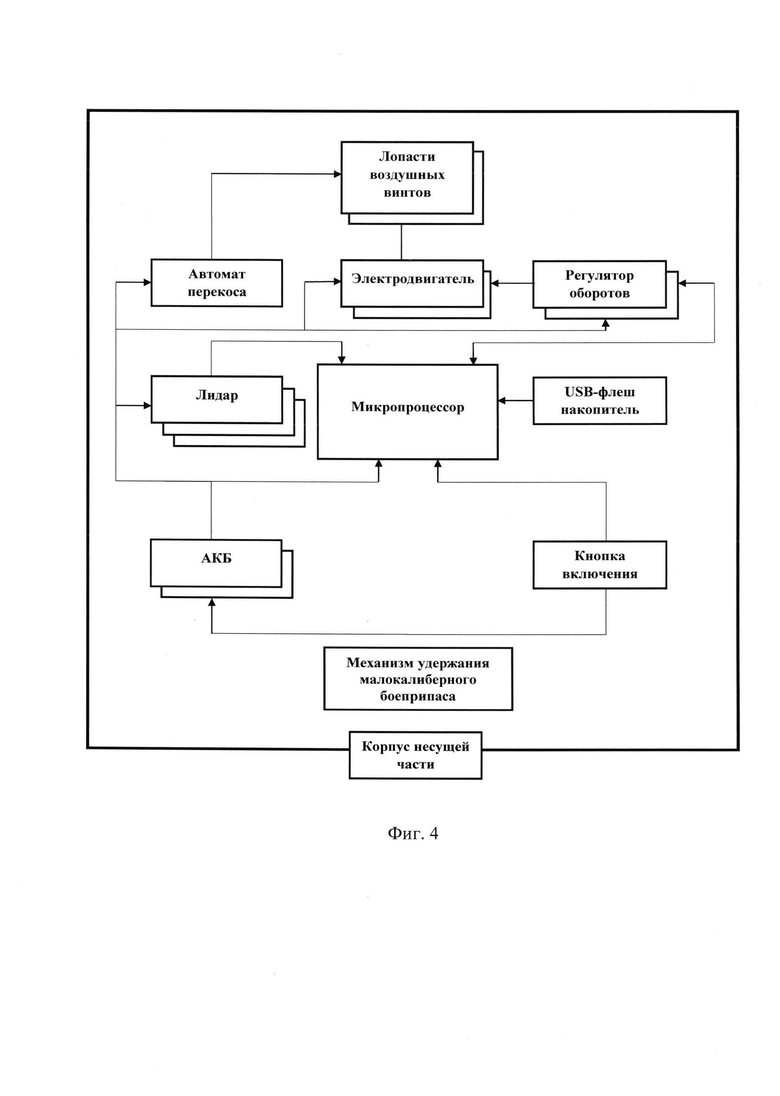
На фиг. 4 изображена функциональная схема принципа работы АБПЛА для доставки малокалиберных боеприпасов до цели.
АБПЛА состоит из несущей части 1 (фиг. 1), корпус которой выполнен из высокопрочного полимерного материала типа Aerotex. В верхнем уровне несущей части расположены лопасти воздушных винтов 2 (фиг. 1), приводимые в движение автоматом перекоса 3 (фиг. 1) и двумя электродвигателями 4 (фиг. 1) с регулятором оборотов 5 (фиг. 1). Принцип движения (полета) АБПЛА заключается в том, что лопасти воздушных винтов, описывая полный круг вокруг своей оси при вращении, обтекаются встречным потоком воздуха. Лопасти воздушных винтов имеют определенный вес, поэтому при вращении с достаточно большой скоростью на них действуют центробежная сила, сила сопротивления и подъемная сила.
В среднем уровне несущей части на внутренней поверхности ее корпуса на основании, закрепленном шестью пазами, расположена система управления АБПЛА, включающая в себя микропроцессор 6 (фиг. 1) и средств лазерного сканирования (три лидара) 7 (фиг. 1). Микропроцессор обрабатывает входящие сигналы, поступающие от лидаров, с целью их сравнения с имеющейся на USB-флеш-накопителе информацией 8 (фиг. 1), которая содержит данные о топологической структуре рельефа местности и цели. После сравнения данных, микропроцессор производит ориентирование относительно топологической карты местности и задает вектор движения к заданной координате. На основании направления вектора движения микропроцессор выдает управляющие сигналы на регулятор оборотов электродвигателей, приводя в действие автомат перекоса, а значит и лопасти воздушных винтов, благодаря чему АБПЛА имеет возможность свободно двигаться в пространстве.
Электропитание электродвигателей и системы управления осуществляется с помощью двух графеновых аккумуляторов (АКБ) 9 (фиг. 1), установленных в специальные пазы под основанием микропроцессора, один из которых для работы микропроцессора и средств лазерного сканирования местности, второй для питания электродвигателей с регулятором оборотов и лопастей воздушных винтов.
Дополнительно в нижнем уровне несущей части корпуса размещена кнопка включения 10 (фиг. 1) АКБ и микропроцессора, и расположен механизм удержания малокалиберного боеприпаса 11 (фиг. 1), представляющий собой две полуокружности, которые создают механическое усилие, посредством стягивания затяжного винта левой и правой полуокружностей, за счет которого малокалиберный боеприпас надежно фиксируется по всей площади соприкосновения.
По прибытию АБПЛА по указанным в программе координатам, лидары осуществляют сканирование местности на наличие потенциальной цели. При ее обнаружении микропроцессор инициирует команду на скоростное падение АБПЛА совместно с малокалиберным боеприпасом для огневого поражения цели противника.
В отличие от известных устройств, предлагаемое устройство позволяет автономно осуществлять поражение живой силы противника, будучи невосприимчивым к средства РЭБ противника.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что они позволяют оперативно, надежно и эффективно осуществить поражение цели противника в автономном режиме, в котором исключается перехват управления АБПЛА противником.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы серийно производимые электронные комплектующие, лидары, электродвижущиеся механизмы, а также 3D-принтеры для печати несущей части корпуса АБПЛА и его составных частей.
Источники информации
1. Патент РФ на полезную модель № RU 211527 U1 от 09.06.2022 г. «Беспилотный летательный аппарат для полета в топках котлов теплоэлектростанций».
2. Патент РФ на полезную модель № RU 181691 U1, 26.07.2018 г. «Беспилотный летательный аппарат для поисковых и спасательных операций».
3. Патент РФ на изобретение № RU 2723201 С1, 09.062.2020 г. «Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека».
4. Патент РФ на изобретение № RU 2771508 С2, 05.05.2022 г. «Боеприпас с совмещением режимов обнаружения и поражения цели к подствольному гранатомету».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ доставки малокалиберных боеприпасов до цели с помощью автономного беспилотного летательного аппарата | 2024 |
|
RU2828335C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ РОЗЫСКА РАНЕНЫХ | 2023 |
|
RU2823826C1 |
| ПРОТИВОТАНКОВЫЙ РАКЕТНЫЙ КОМПЛЕКС С ВОЗДУШНЫМ МОДУЛЕМ ВООРУЖЕНИЯ | 2011 |
|
RU2470250C2 |
| Беспилотный летательный аппарат вертолётного типа | 2022 |
|
RU2799689C1 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
| Система боевых беспилотных летательных аппаратов | 2022 |
|
RU2808733C1 |
| Способ проведения поисково-спасательных работ | 2018 |
|
RU2698893C1 |
| Модульный беспилотный летательный аппарат с системой защиты тяговых винтов | 2020 |
|
RU2752110C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ТУШЕНИЯ ПОЖАРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2826399C2 |


Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов. Автономный беспилотный летательный аппарат для доставки малокалиберных боеприпасов до цели состоит из несущей части, в верхнем уровне которой расположены лопасти воздушных винтов и электрические двигатели, приводящиеся в действие автономным источником питания, системы управления аппаратом, находящейся в среднем уровне несущей части, а также механизма удержания малокалиберного боеприпаса, находящегося в нижнем уровне несущей части. Несущие винты снабжены автоматами перекоса. Система управления аппаратом содержит микропроцессор и средства лазерного сканирования местности, работающие совместно с микропроцессором от дополнительного автономного источника питания, и USB-флеш-накопитель, содержащий данные о топологической структуре рельефа местности и цели. Обеспечивается автономный полет БПЛА без участия оператора путем самостоятельной ориентации БПЛА в пространстве по топологической карте и невозможность воздействия на него средствами подавления сигналов радиоуправления и спутниковой навигации противника. 4 ил.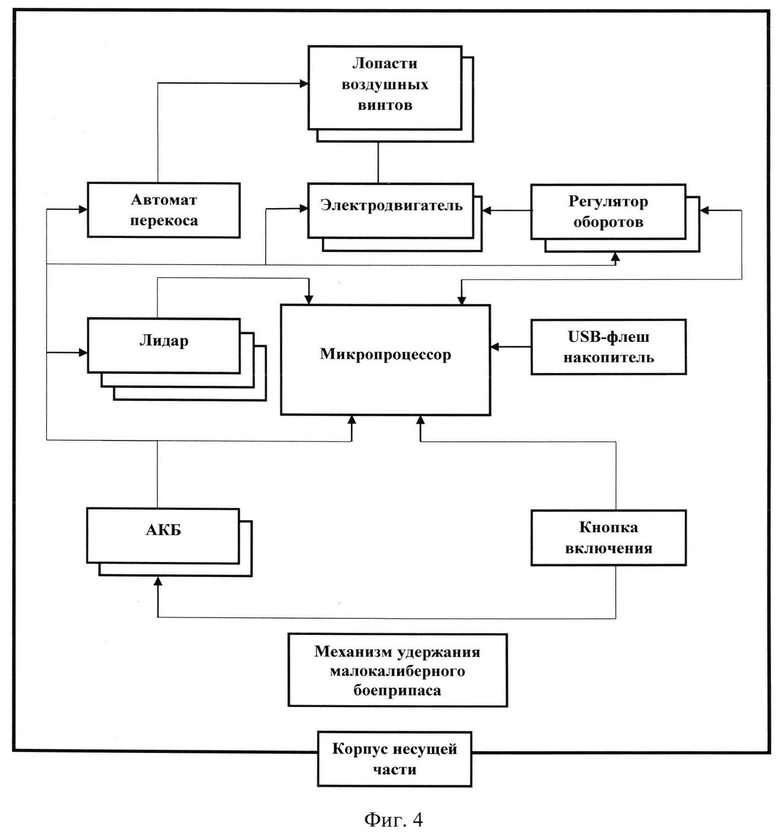
Автономный беспилотный летательный аппарат для доставки малокалиберных боеприпасов до цели, состоящий из несущей части, в верхнем уровне которой расположены лопасти воздушных винтов и электрические двигатели, приводящиеся в действие автономным источником питания, системы управления аппаратом, находящейся в среднем уровне несущей части, а также механизма удержания малокалиберного боеприпаса, находящегося в нижнем уровне несущей части, отличающийся тем, что лопасти воздушных винтов установлены на автомат перекоса, позволяющий двигаться маневренно, а система управления аппаратом содержит микропроцессор и средства лазерного сканирования местности, не подверженные воздействию объектов подавления сигналов радиоуправления и GSM-навигации, работающие совместно с микропроцессором от дополнительного автономного источника питания, и USB-флеш-накопитель, содержащий данные о топологической структуре рельефа местности и цели.
| Боеприпас с совмещением режимов обнаружения и поражения цели к подствольному гранатомету | 2021 |
|
RU2771508C1 |
| Буянов, И | |||
| А | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Способ обнаружения и распознавания малоразмерных объектов на изображениях при помощи алгоритма машинного обучения и устройство для его реализации | 2022 |
|
RU2799078C1 |
| СПОСОБ ПОЛУЧЕНИЯ АРОМАТИЧЕСКИХ ФТОРИДОВ | 1966 |
|
SU215920A1 |

