Настоящее изобретение относится к области автомобильных транспортных средств, и в частности к области систем и устройств для облегчения управления такими транспортными средствами. Более конкретно оно относится к способу определения профиля скорости, которому должно следовать автомобильное транспортное средство.
Известны адаптивные системы управления скоростью для автомобильного транспортного средства (известные под аббревиатурой АСС «адаптивное устройство автоматического поддержания скорости движения» (adaptive cruise control)), которые спроектированы для непрерывного управления скоростью «ведущего» (host) транспортного средства, в соответствии с законом продольного управления для транспортного средства, который способен контролировать скорость «ведущего» транспортного средства в соответствии с инструкцией по заданию скорости, запрошенной водителем, и наличием транспортного средства впереди на той же полосе дорожного движения, называемого «целевым транспортным средством». Этот закон продольного управления может быть использован в различных сценариях. Таким образом, оборудованное транспортное средство может автоматически изменять свою скорость, чтобы поддерживать предварительно заданное безопасное расстояние по отношению к целевому транспортному средству. Как только полоса перед оборудованным транспортным средством освобождается, его ускорение автоматически увеличивается, чтобы достигнуть заданной инструкцией скорости, выбранной водителем, и, таким образом, помогает водителю в его задаче по вождению. Если более медленное транспортное средство обнаруживается на своей полосе перед оборудованным транспортным средством, скорость в этом случае автоматически изменяется, чтобы отрегулировать безопасное расстояние. Этот закон управления может также одновременно проверять критерии комфорта (ограниченные ускорения, замедления и интенсивные ускорения (т.е. производную от ускорения)).
Таким образом, закон управления позволяет управлять продольной скоростью транспортного средства, в соответствии с инструкцией по заданию скорости, определяемой водителем, и, где это применимо, снижать эту скорость в случае обнаружения целевого транспортного средства впереди ведущего транспортного средства. Сейчас такое управление не принимается во внимание для того, чтобы предвидеть замедление и ускорение, контекстуальную и семантическую информацию, которая может быть извлечена из дорожной сцены, наблюдаемой мультисенсорной системой обнаружения, установленной на ведущем транспортном средстве, например, такой как прибытие на знак СТОП, приближение к кольцевой развязке, повороту, пробке или изменению ограничения скорости и т.д. Следовательно, поведение транспортного средства не всегда адаптировано к окружающей среде. Однако учет контекстуальной информации желательно принимать во внимание для создания более надежных систем управления, которые являются существенными для автономного вождения.
Патентный документ US 2019106108 описывает закон управления, который определяет профиль скорости автомобильного транспортного средства на запланированной траектории в ответ, по меньшей мере частично, на (i) обнаружение объекта на запланированной траектории, (ii) определение изменения в ограничении скорости на запланированной траектории и (iii) выбор скорости пользователем. Тогда закон управления позволяет управлять скоростью транспортного средства на запланированной траектории в соответствии с заданным профилем скорости.
Однако эта публикация остается очень общей в реализации. В частности, указано, что используется профиль скорости, основанный на профиле ускорения, который рассчитывается по-разному в зависимости от определенных условий, но не поясняется, как этот профиль рассчитывается, чтобы обеспечить комфорт водителя. Еще одна проблема заключается наличии достаточного объёма данных, чтобы позволять калибровку системы.
В более общем смысле, еще одна проблема остается в предшествующем уровне техники, которая заключается в создании профиля скорости, которому должен следовать регулятор скорости, что позволяет экономить энергию во время поездки.
Для преодоления проблем, упомянутых выше, одной из задач изобретения является способ определения профиля скорости, которому должно следовать автомобильное транспортное средство, причем способ включает в себя этапы получения контекстуальной информации о дорожной обстановке вокруг транспортного средства с помощью мультисенсорной системы транспортного средства для извлечения данных о событии из полученной контекстуальной информации, включающей в себя по меньшей мере одно расстояние до события по отношению к упомянутому транспортному средству и целевую скорость для упомянутого транспортного средства в этом событии, обеспечения измеренной начальной скорости упомянутого транспортного средства, определения профиля скорости, которому транспортное средство должно следовать как функции времени, между указанной измеренной начальной скоростью и указанной целевой скоростью в трех последовательных отдельных фазах, соответственно первой фазе, в которой скорость изменения ускорения устанавливается постоянной на предварительно заданном максимальном значении скорости изменения ускорения, чтобы достичь оптимального целевого значения ускорения в конце первой фазы, второй фазе, в которой упомянутое оптимальное целевое значение ускорения поддерживается постоянным на протяжении всей продолжительности второй фазы, и третьей фазе, в которой скорость изменения ускорения снова устанавливается постоянной для достижения нулевого значения ускорения в конце третьей фазы, при этом указанный способ включает в себя этап определения упомянутого оптимального целевого значения ускорения во время второй фазы, такого значения, что расстояние, необходимое для выполнения трех фаз упомянутого профиля путем применения упомянутого заданного оптимального целевого значения ускорения, равно упомянутому расстоянию до события.
Предпочтительно, расстояние, необходимое для выполнения трех фаз упомянутого профиля, рассчитывается из набора уравнений, реализованных для вычисления профиля скорости, этапы вычисления которого включают в себя, для набора фиксированных параметров, содержащих начальную скорость и начальное ускорение транспортного средства при запуске профиля скорости, целевую скорость в момент события и предварительно заданное максимальное значение скорости изменения ускорения, а также для нефиксированного параметра, включающего в себя оптимальное целевое ускорение, которое должно быть достигнуто во второй фазе профиля:
- вычисление продолжительности фаз и времени начала и окончания, разграничивающих фазы,
- вычисление скоростей прохождения в начальный и конечный моменты времени, разграничивающие вторую фазу,
- вычисление скорости, как функции времени для каждой из фаз, и
- вычисление пройденных расстояний в начальный и конечный моменты времени, разграничивающие фазы.
Предпочтительно, определение упомянутого оптимального целевого значения ускорения выполняется посредством итерации и деления пополам из предварительно заданного диапазона, ограниченного минимальным значением ускорения и максимальным значением ускорения.
Предпочтительно, на каждой итерации расстояние, необходимое для создания профиля, рассчитывается с промежуточным значением ускорения, которое является барицентром двух значений - минимального и максимального значений ускорения.
Предпочтительно, в упомянутой третьей фазе скорость изменения ускорения устанавливается постоянной на упомянутом предварительно заданном максимальном значении скорости изменения ускорения первой фазы.
Как вариант, на упомянутой третьей фазе скорость изменения ускорения устанавливается постоянной на предварительно заданном максимальном значении скорости изменения ускорения, отличном от упомянутого предварительно заданного максимального значения скорости изменения ускорения первой фазы.
Предпочтительно, упомянутое предварительно заданное максимальное значение скорости изменения ускорения отличается в зависимости от того, относится ли профиль скорости к положительному ускорению или к отрицательному ускорению транспортного средства.
Предпочтительно, способ содержит этап передачи упомянутого профиля скорости в качестве инструкции адаптивной системе управления скоростью, установленной на транспортном средстве.
Изобретение также относится к устройству, предназначенному для установки на борту транспортного средства для реализации описанного выше способа, отличающемуся тем, что оно содержит мультисенсорную систему, способную получать контекстуальную информацию о дорожной обстановке вокруг автомобильного транспортного средства, датчик скорости транспортного средства, средство для вычисления упомянутого профиля скорости, как функции данных о событии, извлеченных из упомянутой полученной контекстуальной информации, и средство управления для применения упомянутого вычисленного профиля скорости к адаптивной системе управления скоростью транспортного средства.
Изобретение также относится к автомобильному транспортному средству, содержащему описанное выше устройство.
Другие признаки и преимущества изобретения станут очевидными из приведённого ниже описания, в качестве полностью неограничивающего указания, со ссылкой на прилагаемые чертежи, на которых:
Фиг. 1 представляет собой график, иллюстрирующий пример профиля скорости, согласно изобретению, как функции времени, с ускорением, зависящим от расстояния до события, что позволяет транспортному средству перейти от его начальной скорости к целевой скорости, которая должна быть достигнута в момент времени события, в том случае, когда целевая скорость ниже начальной скорости;
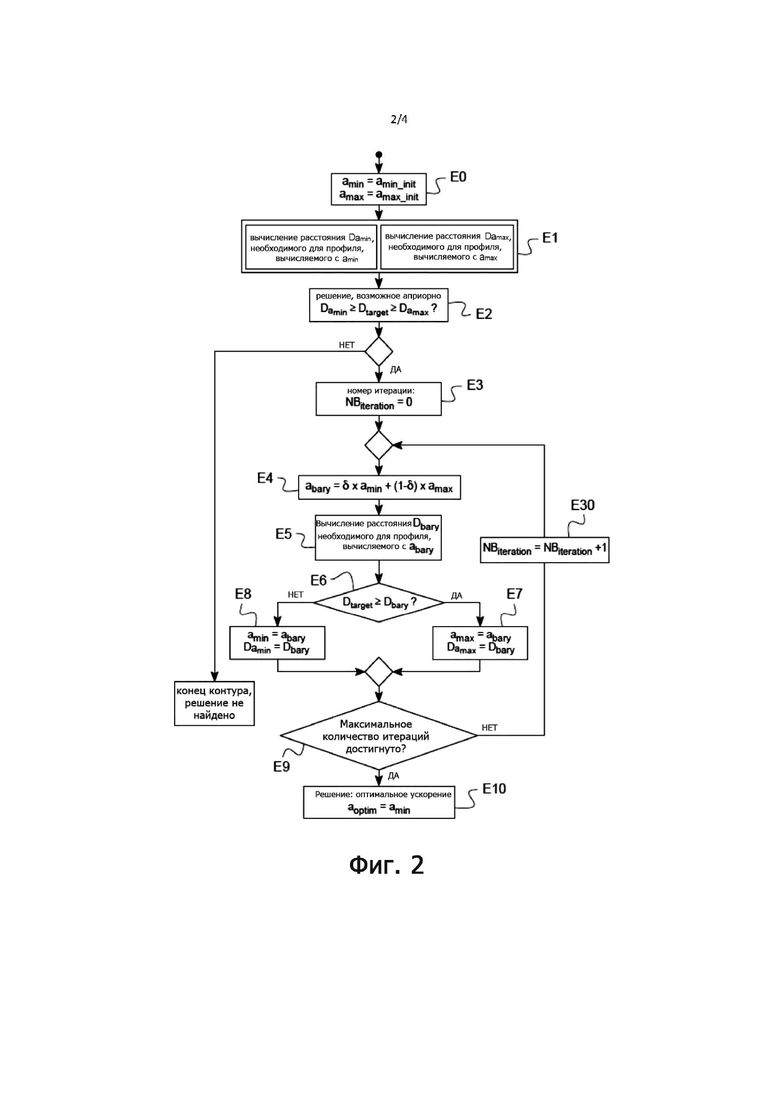
Фиг. 2 представляет собой блок-схему последовательности процесса, иллюстрирующую алгоритм деления пополам, реализованный для определения ускорения, необходимого на второй фазе профиля скорости;
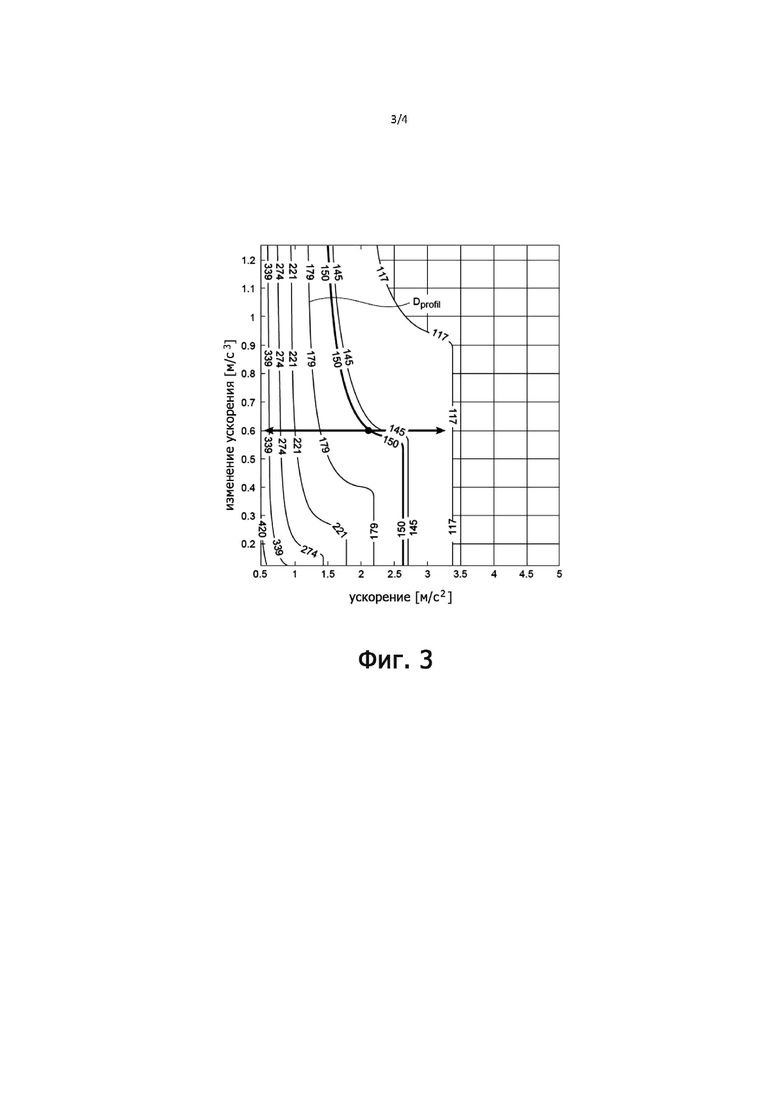
Фиг. 3 представляет собой график, иллюстрирующий различные значения расстояния, необходимые для создания профиля скорости, в зависимости от значений ускорения и скорости изменения ускорения, выбранных для установки заданных значений начальной скорости и целевой скорости.
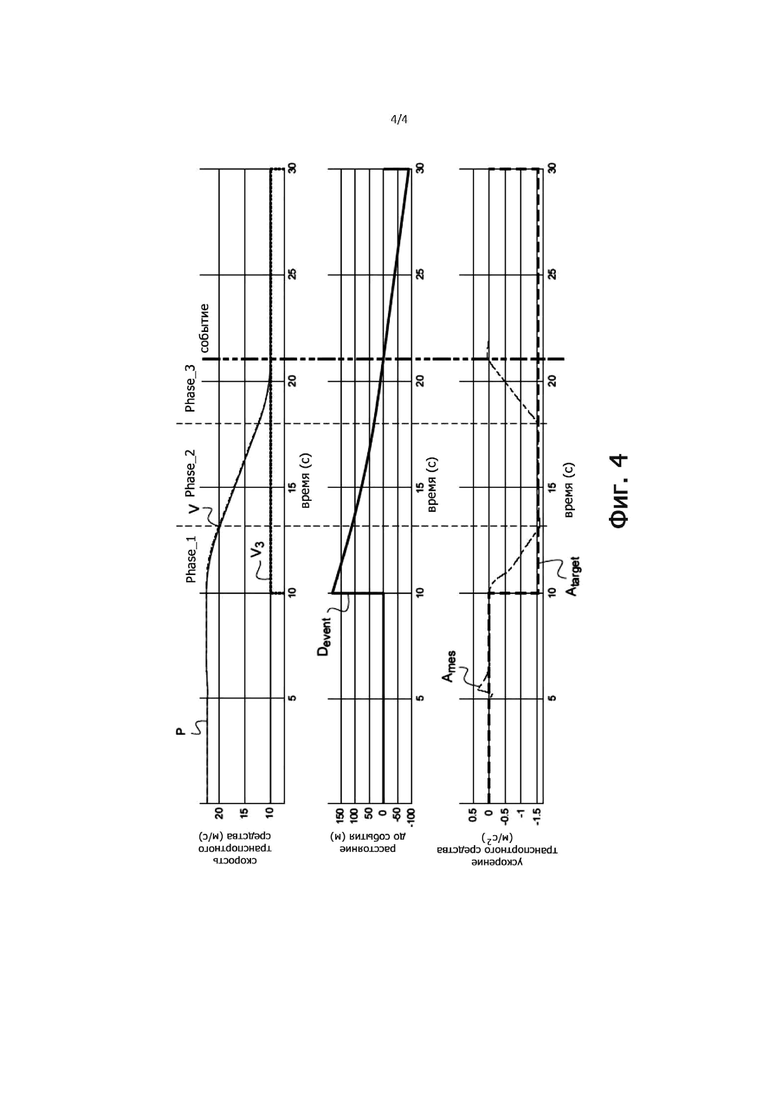
Фиг. 4 представляет собой набор графиков, иллюстрирующих скорость транспортного средства, в соответствии с профилем скорости, расстоянием до события и ускорением транспортного средства.
Изобретение относится к автомобильному транспортному средству, оборудованному адаптивной системой управления скоростью и мультисенсорной системой восприятия, которые способны предоставлять контекстуальную информацию, относящуюся к событиям на дорожной сцене впереди транспортного средства, например, приближение к кольцевой развязке, повороту, дорожной пробке, изменении скоростного режима и т.д. Данные, собранные бортовыми датчиками, отправляются на электронный компьютер, который посредством алгоритма восприятия окружающей среды, анализирующего эти данные, составляет описание обстановки вблизи транспортного средства и конфигурацию дорожной сцены. Из этой окружающей обстановки система способна обеспечивать пару (расстояние, скорость), относящуюся к обнаруженному событию и включающую в себя расстояние от этого события Devent и скорость V3, которая должна быть достигнута в момент этого события, называемую целевой скоростью. Это обнаруженное событие может быть, например, знаком ограничения скорости.
Транспортное средство также содержит бортовой датчик скорости, предоставляющий информацию о его скорости и ускорении путем обработки скорости.
Профиль скорости, описанный ниже, представляет собой профиль скорости, определенный на основе измеренной скорости транспортного средства и предназначенный для передачи в качестве инструкции, которой следует следовать системе адаптивного управления скоростью транспортного средства, чтобы предвидеть замедления и ускорения при приближении к событию. Более конкретно, профиль скорости должен позволять транспортному средству переходить от его начальной скорости к целевой скорости при соблюдении ограничений в динамике транспортного средства с точки зрения ускорения, которое может быть положительным или отрицательным (замедление), в зависимости от типа профиля, и скорости изменения ускорения, то есть является производной ускорения. Эти последние ограничения позволят оптимизировать характеристики адаптивной системы управления скоростью транспортного средства при следовании этому профилю.
Теперь принцип профиля скорости согласно изобретению будет проиллюстрирован начиная с примера убывающего профиля, как проиллюстрировано на фиг. 1, принимая в качестве исходного предположения нулевое начальное ускорение и постоянную начальную скорость транспортного средства, обозначенную как V0, и, в качестве конечного предположения, нулевое ускорение и постоянную целевую скорость V3 транспортного средства, при этом V3 < V0, поскольку профиль скорости здесь уменьшается.
Профиль скорости, представленный на фиг. 1, согласно изобретению, определяется тремя последовательными фазами:
- первой фазой, обозначенной как Phase_1, проходящей между временем начала t0 и временем окончания t1, ограничивающим эту фазу, в которой значение скорости изменения ускорения устанавливается равным предварительно заданному максимальному значению скорости изменения ускорения, абсолютное значение которого обозначается как Jmaxi, для достижения оптимального целевого значения ускорения в момент времени t1 , абсолютного значения, обозначенного как Atarget,
- второй фазой, обозначенной как Phase_2, проходящей между временем начала t1 и временем окончания t2, ограничивающим эту фазу, в которой целевое значение ускорения, достигнутое в момент t1, поддерживается постоянным на протяжении всей продолжительности второй фазы, при этом значение скорости изменения ускорения равно нулю,
- третьей фазой, обозначенной Phase_3, проходящей между временем t2 начала и временем t3 окончания, ограничивающим эту фазу, в которой значение скорости изменения ускорения снова предпочтительно устанавливается равным предварительно заданному максимальному значению Jmaxi скорости изменения ускорения, чтобы вернуться к нулевому значению ускорения в момент времени t3.
Разделение профиля скорости, в соответствии с изобретением, на три отдельные последовательные фазы необходимо для того, чтобы соблюдать ограничения в динамике транспортного средства с точки зрения значения скорости изменения ускорения в фазах Phase _1 и Phase _3.
Таким образом, существует следующий набор фиксированных параметров:
V0: начальная скорость при запуске профиля скорости;
V3: целевая скорость, которую необходимо достичь в момент события;
Ainit: ускорение транспортного средства при запуске профиля скорости, которое может быть не равно нулю;
Jmaxi: максимальное значение изменения ускорения, определенное для профиля.
Профиль скорости выражается двумя расчетными функциями, фактически используемыми системой контроля скорости транспортного средства:
Скорость Vprofil, согласно инструкции, которой нужно следовать как функции от времени (t):
Vprofil (t) = f (t, V0, V3, Ainit, Jmaxi)
Расстояние, необходимое для достижения профиля скорости, обозначается как Dprofil.
Отслеживание профиля будет запущено, как только расстояние до целевого события, которое требуется предвидеть, Devent, полученное от системы мультисенсорного восприятия данного транспортного средства, станет равным Dprofil для заданного набора параметров.
Желательно запускать профиль, когда известно расстояние до события Devent и скорость V3, которая должна быть достигнута в момент события, следование за профилем должно гарантировать поведение, адаптированное к целевой скорости, требующейся в месте этого события. Для этого типа профиля используемое ускорение не является ограничением. Создается профиль скорости с незаданным ускорением. Поэтому необходимо определить ускорение перед вычислением профиля скорости, которому необходимо следовать. Ускорение определяется с методом деления пополам.
Способ деления пополам позволяет найти оптимальное целевое значение Atarget ускорения, таким образом:

Этапы вычисления, для того чтобы вычислить это расстояние, необходимое для достижения профиля Dprofil скорости, будут подробно описаны ниже.
Рассчитываются продолжительности фаз и время t0, t1, t2 и t3, начала и окончания, ограничивающие фазы Phase_1, Phase_2 и Phase_3, как определено на фиг. 1.
[0043] Рассчитываются скорости V1 и V2 прохождения, которые согласуются с соответствующими скоростями прохождения в начальный и конечный моменты времени t1 и t2, ограничивающие вторую фазу Phase_2.
Рассчитывается поведение скорости как функции времени для каждой из фаз Phase_1, Phase_2 и Phase_3.
Рассчитываются пройденные расстояния как функция времени в каждый из моментов времени t0, t1, t2 и t3, ограничивающих различные фазы Phase_1, Phase_2 и Phase_3, расстояния обозначены X0, X1, X2 и X3 соответственно. Таким образом, расстояние, необходимое для достижения профиля, равно Dprofil = X3.
Результаты этих этапов вычисления профиля скорости подробно описаны ниже и будут продемонстрированы далее.
Для вычисления времени t0, t1, t2 и t3 начала и окончания, ограничивающих фазы Phase_1, Phase_2 и Phase_3, используются следующие обозначения:
t0 = 0 (по предположению)
t1 = Т01
t2 = Т01+ T12
t3 = Т01+ T12+ T23
Т01, T12 и T23 - соответствующие продолжительности фаз Phase_1, Phase_2 и Phase_3 при интегрировании скорости между различными точками:
Т01= Atarget / Jmaxi
T12 = (V0 - V3)/ Atarget - Atarget / Jmaxi
T23 = Atarget / Jmaxi
Что касается различных скоростей прохождения фаз, т. е. скоростей в моменты времени t0, t1, t2 и t3, обозначаемых соответственно V0, V1, V2 и V3, то они выражаются следующим образом:
V0, начальная скорость профиля, которая является заданным значением, соответствующим текущей измеренной скорости транспортного средства при вычислении профиля,
V1 = V0 - Jmaxi × ( )
)
V2 = V3 +  × Jmaxi
× Jmaxi
V3 — это целевая скорость, которую желательно достичь, следуя профилю скорости, и она также задаётся, как и начальная скорость.
Уравнение для профиля скорости v(t) для каждой из фаз определяется как функция истекшего времени следующим образом:
Фаза Phase_1, для 0 ≤ t ≤ t1: V(t)= V0 - Jmaxi × 
Фаза Phase _2, для t1 ≤ t ≤ t2 : V(t)= V1 - Atarget × (t - t1)
Фаза Phase_3, для t2 < = t < = t3 : V(t)= V3 +  × Jmaxi
× Jmaxi
Пройденные расстояния, как функция времени, рассчитываются следующим образом:
X0 = 0 (по предположению)
X1= X0 + Т01 × V0 -  × Jmaxi
× Jmaxi
X2 = X1 + Т12 × V1 -  × Atarget
× Atarget
X3 = X2 + Т23 × V3 +  × Jmaxi
× Jmaxi
Расстояние, необходимое для достижения профиля, равно Dprofil = X3. Таким образом, когда расстояние до события равно X3, отслеживание профиля скорости будет запущено путем отправки инструкции по скорости V(t), как определено выше.
Эти результаты сейчас будут продемонстрированы.
Для фазы Phase_1 для времени t, такого что t0 ≤ t ≤ t1:
Изменение J01(t) ускорения профиля на этой первой фазе устанавливается постоянным и имеет значение: J01 (t)= - Jmaxi
Поскольку начальное ускорение Ainit равно нулю, ускорение как функция времени, обозначенное как A01 (t) на этой первой фазе, имеет значение:
A01 (t)= Ainit + 
A01 (t) = - Jmaxi × t
Затем отсюда выводится изменение скорости как функции от времени, обозначенное V01 (t) на этой первой фазе:
V01 (t) = V0 + 
V01 (t) = V0 - Jmaxi ×
Следовательно, пройденное расстояние как функция времени X01 (t) в первой фазе Phase_1:

Для второй фазы Phase_2 при времени t, таком что t1 ≤ t ≤ t2:
Ускорение как функция времени, обозначенное A12 (t) в этой второй фазе, является постоянным в этой фазе, а именно:
A12 (t) = - Atarget,
Следовательно, отсюда выводится изменение скорости как функция от времени в этой второй фазе, обозначенной как V12 (t):
V12 (t)= V1 + 
V12 (t) = V1 - Atarget × (t - t1)
Следовательно, пройденное расстояние, как функция от времени X12 (t) в этой второй фазе:
X12 (t) = X1 + 
X12 (t) = X1 + (t - t1) × V1 -  × Atarget
× Atarget
Наконец, для третьей фазы Phase_3, для времени t такого, что t2 ≤ t ≤ t3:
Изменение J23 (t) ускорения профиля на этой первой фазе устанавливается постоянным и имеет значение:
J23 (t)= Jmaxi
Поскольку конечное ускорение на третьей фазе Afinal равно нулю, ускорение как функция от времени, обозначенное A23 (t), на этой фазе имеет значение:
A23 (t) = Afinal + 
A23 (t) = (t – t3) × Jmaxi
Затем отсюда выводится изменение скорости как функция от времени в этой третьей фазе, обозначенной как V23 (t):
V23 (t)= V3 + 
V23 (t) = V3 +  × Jmaxi
× Jmaxi
Следовательно, пройденное расстояние как функция времени X23 (t) в этой фазе, составляет:
X23 (t) = X3 + 
X23 (t) = X3 + (t – t3) × V3 +  × Jmaxi
× Jmaxi
Следует напомнить, что для выражения соответствующих продолжительностей фаз Т01, Т12 и Т23, а также времени начала и окончания, ограничивающих фазы, используются следующие обозначения:
t0 = 0 (по предположению)
t1 = Т01
t2 = Т01 + Т12
 t3 = Т01 + Т12 + Т23
t3 = Т01 + Т12 + Т23
Продолжительность Т01 первой фазы Phase_1 имеет значение:
Т01 = t1 – t0= t1
Однако ускорение является непрерывным между первой фазой Phase_1 и второй фазой Phase_2, т. е.:
A01 (t1) = A12 (t1)
Что эквивалентно:
- Jmaxi × t1 =- Atarget
Следовательно: Т01 = t1 = (Atarget)/(Jmaxi)
Таким образом, скорость V1, достигнутая в момент времени t1 (соответствующий концу первой фазы и началу второй фазы), имеет значение:
V1= V01 (t1) = V01 (Т01)
А именно V1= V0 - Jmaxi × 
Теперь, начиная с продолжительности Т23 третьей фазы Phase_3, она имеет значение:
Т23 = t3 – t2
Однако, как и между первой фазой и второй фазой, ускорение непрерывно между второй фазой Phase_2 и третьей фазой Phase_3, т.е.:
A23 (t2) = A12 (t2)
Что эквивалентно:
(t2 – t3) × Jmaxi = - Т23 × Jmaxi = - Atarget
Следовательно: Т23 =(Atarget)/(Jmaxi)
Таким образом, скорость V2, достигнутая в момент времени t2 (соответствующий концу второй фазы и началу третьей фазы), имеет значение:
V2 = V23 (t2) = V23 (Т23)
Следовательно: V2 = V3 + Jmaxi × 
Теперь, начиная с продолжительности Т12 второй фазы Phase_2, она имеет значение:
Т12 = t2 – t1
Однако скорость в момент времени t2 в конце второй фазы обозначается как V2 и может быть записана следующим образом:
V12 (t2) = V2
Что эквивалентно:
V1 - Atarget × (t2 – t1) = V1 - Atarget × Т12 = V2
Таким образом: Т12 = (V1 - V2)/ Atarget
Путем замены выражений V1, V2, Т01 и Т23, которые были выведены ранее, из них выводится следующее:
Т12 = (V0 – V3) / Amaxi - Atarget / Jmaxi
Из демонстрации результатов вычисления профиля скорости очевидно, что, хотя он определяется в 3 этапа как функция от времени, его реализация остается простой, поскольку требует только простых математических операций (сложения, умножения, деления) и простых логических проверок. Поэтому необходимая вычислительная мощность является ограниченной.
Теперь делается ссылка на более общий профиль скорости, т. е. тот, который может увеличиваться или уменьшаться, с начальным значением ускорения, которое может быть не равным нулю.
Таким образом, используемое здесь начальное предположение состоит в том, что начальное ускорение Ainit может быть отличным от нуля, и начальная скорость V0 транспортного средства постоянная, и в качестве конечного предположения - нулевое ускорение и постоянная целевая скорость V3 транспортного средства, соответствуют выражениям V3 < V0 или V3 > V0, в зависимости от того, уменьшается или увеличивается профиль скорости.
Как и в предыдущем примере, профиль скорости, согласно изобретению, всегда определяется следующими тремя последовательными фазами:
- первая фаза Phase_1, где значение изменения ускорения устанавливается равным максимальному значению Jmaxi изменения ускорения, чтобы достичь оптимального целевого значения ускорения, зависящего от расстояния до обнаруженного события, с абсолютным значением, обозначенным как Atarget,
- вторая фаза Phase_2, где ускорение поддерживается на оптимальном целевом значении ускорения,
- третья фаза, с максимальным значением изменения ускорения, чтобы вернуться к нулевому значению ускорения.
Таким же образом, как и выше, расстояние, необходимое для достижения профиля скорости, обозначается Dprofil. Таким образом, профиль будет срабатывать при достижении расстояния Dprofil до события.
Поскольку параметры Ainit и Jmaxi являются абсолютными значениями, вводятся следующие переменные s и s1, отражающие относительные значения ускорения и изменения ускорения.
Переменная s определяется следующим образом:
s = 
Таким образом, если профиль увеличивается, то есть V3 > V0, то s будет иметь значение 1, а если он уменьшается, s будет иметь значение -1. Кроме того, на первой фазе Phase_1 профиля скорости ускорение изменится с Ainit на s× Atarget, на второй фазе Phase_2 оно будет сохранено на уровне s × Atarget, а на третьей фазе Phase_3, оно изменится с s × Atarget на 0 м/с².
Кроме того, переменная s1 определяется следующим образом:
s1 = 
Таким образом, эта переменная представляет направление изменения ускорения на первой фазе Phase_1, которое меняется с Ainit на s × Atarget. Таким образом, изменение ускорения в этой фазе имеет значение s1 × Jmaxi.
Как объяснялось со ссылкой на предыдущий пример, этапы для вычисления профиля скорости следующие:
Рассчитываются продолжительности фаз и время t0, t1, t2 и t3 начала и окончания, ограничивающие фазы Phase_1, Phase_2 и Phase_3.
Рассчитываются скорости V1 и V2 прохождения, которые согласуются с соответствующими скоростями прохождения в начальный и конечный моменты времени t1 и t2, ограничивающие вторую фазу Phase_2.
Рассчитывается поведение скорости как функции времени для каждой из фаз Phase_1, Phase_2 и Phase_3.
Рассчитываются пройденные расстояния в зависимости от времени для каждого из моментов времени t0, t1, t2 и t3, ограничивающих различные фазы Phase_1, Phase_2 и Phase_3, соответственно обозначенные как X0, X1, X2 и X3.
В таблице ниже представлены изменения переменных: изменения ускорения, ускорения, скорости и пройденного пути на разных фазах общего профиля скорости:
Таблица 1
Следуя такой же процедуре, что и в случае с предыдущим примером, относительно уменьшающегося профиля скорости и нулевого начального ускорения, параметры и скорости профиля определяются следующим образом:
Что касается моментов времени начала и окончания первой фазы Phase_1, используются следующие обозначения:
t0 = 0 (по предположению)
t1 = Т01
С соответствующими продолжительностями первой и третьей фаз Phase_1 и Phase_3, которые указаны следующим образом:
Т01 = s1 × (s × Atarget - Ainit)/(Jmaxi)
Т23 = Atarget / Jmaxi
Скорости прохождения фаз выражаются следующим образом:
V0 - заданная начальная скорость профиля,
V1 = V0 + Т01 × Ainit + s1× Jmaxi ×
V2 = V3 - s × Jmaxi ×
V3 - заданная целевая скорость.
Продолжительность Т12 второй фазы Phase_2 определяется следующим образом:
Т12 = s × (V2 – V1) / Atarget
Моменты времени t2 и t3, ограничивающие третью фазу Phase_3, определяются следующим образом:
t2 = Т01 + Т12
t3 = Т01 + Т12 + Т23
Уравнение для профиля скорости v(t) для каждой из фаз определяется как функция истекшего времени следующим образом:
Фаза Phase_1, для 0 ≤ t ≤ t1: V(t)= V0 + Ainit × t + s1 × Jmaxi × 
Фаза Phase_2, для t1 ≤ t ≤ t2: V(t)= V1 + Atarget × s × (t - t1)
Фаза Phase_3, для t2 < = t <= t3: V(t)= V3 + × (- Jmaxi ×s)
Пройденные расстояния как функция времени рассчитываются следующим образом:
X0 = 0 (по предположению)
X1 = X0 + Т01 × V0 +  × Ainit +
× Ainit +  × s1 × Jmaxi
× s1 × Jmaxi
X2 = X1 + Т12 × V1 +  × Atarget × s
× Atarget × s
X3 = X2 + Т23 × V3 -  × Jmaxi × s
× Jmaxi × s
Расстояние, необходимое для достижения профиля, равно Dprofil= X3.
Как вариант, значения изменения ускорения, установленные в первой и третьей фазах профиля скорости, могут быть разными.
В качестве дополнительного варианта можно было бы предусмотреть различные значения изменения ускорения в зависимости от того, относится ли профиль к ускорению или к замедлению.
Ускорение Atarget, необходимое на второй фазе Phase_2 профиля, определяется делением пополам, в соответствии с алгоритмом деления пополам, представленным на фигуре 2. Это деление пополам принимает в качестве критерия расстояние, необходимое для достижения профиля Dprofil, которое рассчитывается с использованием приведенных выше уравнений, и которое должно быть равно расстоянию до события.
Таким образом, профиль скорости предпочтительно генерируется из следующего набора фиксированных параметров, включающего в себя начальную скорость V0 транспортного средства при запуске профиля скорости, скорость V3, которая должна быть достигнута во время события, начальное ускорение Ainit транспортного средства при старте профиля скорости, предварительно заданное максимальное значение изменения ускорения и не заданный предварительно параметр, в данном случае целевое ускорение, которое должно быть достигнуто во второй фазе профиля Atarget. Согласно одному конкретному признаку изобретения, этот последний параметр принимает оптимальное значение, определяемое по завершению поиска с помощью деления пополам, при этом упомянутое оптимальное значение ускорения выбирается в ограниченном диапазоне, таком как расстояние, необходимое для достижения профиля для набора фиксированных параметров, а упомянутое оптимальное значение ускорения равно расстоянию до события Devent.
Алгоритм деления пополам теперь будет описан более подробно со ссылкой на фиг. 2. Задача состоит в том, чтобы определить оптимальное значение aoptim ускорения, выбранное в предварительно заданном диапазоне, который проходит между минимальным значением amin ускорения и максимальным значением amax ускорения, в результате чего расстояние, необходимое для достижения профиля, равно расстоянию до события Devent. Следует обратить внимание, что расстояние, необходимое для достижения профиля, уменьшается по мере увеличения ускорения.
Поэтому на первом этапе E0 инициализации устанавливаются эти минимальное и максимальное значения ускорения, определяющие диапазон, а именно:
аmin = аmin _ init
аmax = аmax_ init
На этапе E1 вычисляется, используя описанные выше уравнения, сначала расстояние Dаmin, соответствующее расстоянию, необходимому для достижения профиля скорости, принимая в качестве значения ускорения, необходимого во втором фазе профиля, минимальное значение аmin ускорения и, во-вторых, расстояние Dаmax, соответствующее расстоянию, необходимому для достижения профиля скорости, принимая в качестве значения ускорения, необходимого во второй фазе профиля, максимальное значение аmax ускорения.
Затем реализуется тестовый этап E2, целью которого является проверка возможности определения оптимального значения ускорения. Другими словами, проверяется, находится ли расстояние Devent, на котором находится событие, между расстояниями, необходимыми для профиля, рассчитанного соответственно с максимальным и минимальным значениями аmax и аmin ускорения, а именно:
Dаmin ≥ Devent ≥ Dаmax
Если тест не пройден, алгоритм завершается этапом E20, что означает, что не может быть найдено значение ускорения для достижения профиля, при котором расстояние, необходимое для достижения профиля, равно расстоянию до события.
И наоборот, если тест пройден, алгоритм переходит к этапу E3, на котором индекс NBiteration итерации цикла инициализируется равным 0.
Далее, на каждой итерации, на этапе E4, сначала определяется промежуточное значение abary в пределах диапазона, ограниченного предварительно заданными минимальными и максимальными значениями ускорения, которое является барицентром двух значений с amin и amax, которым присвоены соответствующие коэффициенты δ и (1 - δ):
abary = δ х amin + (1- δ) х amax
Затем, на этапе E5, все еще на основе описанных выше уравнений, вычисляется расстояние Dbary, соответствующее расстоянию, необходимому для достижения профиля скорости, принимая в качестве значения ускорения, необходимого на втором этапе профиля, значение abary.
Значения Dbary и Devent расстояния затем сравниваются на этапе E6. Если расстояние Devent до события больше или равно расстоянию, необходимому для профиля, рассчитанному с помощью abary, то на этапе E7 устанавливаются максимальное значение аmax ускорения и расстояние Dаmax, необходимое для профиля, вычисляемое с помощью аmax, как следует из:
аmax = аbary
Dаmax = Dbary
В противном случае на этапе E8 устанавливаются минимальное значение α min ускорения и расстояние Dαmin, необходимое для профиля, которые рассчитываются с помощью α min следующим образом:
α min = α bary
Dα min = Dbary
Затем на этапе Е9 проверяется, достигнуто ли максимальное количество итераций цикла. Если нет, то индекс NBiteration итерации цикла увеличивается на этапе E30, а именно:
NBiteration = NBiteration + 1
И процесс возвращается к этапу E4.
Если максимальное количество итераций достигнуто на этапе E9, алгоритм обеспечивает в результате на этапе E10 оптимальное значение ускорения аoptim, такое что:
аoptim= аmin
Таким образом, определение оптимального значения ускорения в диапазоне [amin_init, amax_init] представляет собой процесс поиска посредством деления пополам с вычислением на каждой итерации расстояния, необходимого для достижения профиля с промежуточным значением ускорения, которое представляет собой барицентр двух значений amin и amax, которым присвоены соответствующие коэффициенты δ и (1-δ).
Поскольку изменение ускорения установлено равным значению Jmaxi, способ позволяет получить оптимальное ускорение  такое, что:
такое, что:
Dprofil (аoptim)= Devent
Другими словами, это оптимальное значение α optim ускорения таково, что расстояние, необходимое для достижения профиля, рассчитанное с помощью этого значения, определенного посредством деления пополам, равно расстоянию до события.
Этот способ определения оптимального значения ускорения на второй фазе профиля особенно предпочтителен. Во-первых, необходимая вычислительная нагрузка является предсказуемой. В частности, сходимость гарантируется для фиксированного числа итераций. Во-вторых, это гарантирует хорошую сходимость. Таким образом, для фиксированного количества N итераций и коэффициента δ = 0,5 точность результата аoptim составляет порядка  .
.
Возьмем конкретное иллюстративное применение профиля скорости, рассчитанного согласно изобретению, в следующем случае:
Jmaxi = 0,6 м/с3
Ainit = 0 м/с2
V0 = 22,2 м/с = 80 км/ч
V3 = 10 м/с = 36 км/ч
аmin_init = 0,5 м/с-2, amax_init = 3,4 м/с-2,
Для Devent = 180m получается следующее:
aoptim = 2,1 м/с-2
Фиг. 3 иллюстрирует различные значения, полученные с помощью Dprofil, в зависимости от значений ускорения и изменения ускорения, выбранных для заданных значений V0 и V3. В данном случае, поскольку значение изменения ускорения является фиксированным, развертка выполняется с ускорением вдоль стрелки F.
Таким образом, предварительно заданное максимальное значение изменения ускорения в этом случае получается с помощью фиксации значения Jmaxi, равного 0,6 м/с3, но его также можно было бы задать по-другому, используя технологию развёртывания. В частности, на этапе определения с помощью деления пополам в этом случае не использовалось бы развёртывание ускорения по прямой линии с постоянным значением y, как на фиг. 3, а использовалось бы развёртывание по оси, например, такой как x = y, значение изменения ускорения Jmaxi в этом случае было бы предварительно задано как функция его зависимости от ускорения и два оптимальных значения - ускорения Atarget и изменения Jmaxi ускорения - были бы получены на этапе деления пополам таким образом, что расстояние Dprofil, необходимое для достижения трех фаз упомянутого профиля путем применения упомянутого заданного оптимального целевого значения ускорения и упомянутого значения изменения ускорения, равно упомянутому расстоянию до события Devent.
Профиль P скорости по отношению к этим ограничениям, рассчитанный в соответствии с изложенными выше принципами, иллюстрируется на первом графике фиг. 4. На втором графике фиг. 4 кривая расстояния Devent до события представлена в виде функции времени. На первом графике можно увидеть, что скорость V, измеренная для транспортного средства, достигнутая в результате следования профилю по закону продольного управления для транспортного средства, действительно достигает целевой скорости, необходимой при событии, т.е. скорости V3, когда событие достигнуто, а именно когда Devent = 0.
На третьем графике фиг. 4 кривая ускорения Ames, измеренная для транспортного средства, показана как функция времени. На фиг. можно увидеть, что ускорение транспортного средства ограничено значением 1,6 м/с2, что намного ниже предела, определяемого в расчетных ограничениях (amax_init = 3,4 м/с-2).
Таким образом, оказывается, что профиль скорости, рассчитанный в соответствии с изобретением и переданный в качестве команды в систему адаптивного управления скоростью транспортного средства, позволяет транспортному средству автоматически снижать свои скоростные характеристики для постепенного достижения заданной скорости (36 км/ч в соответствии с примером). Таким образом, это позволяет адаптировать скорость перемещения транспортного средства к контекстуальным элементам, обнаруженным датчиками транспортного средства. В частности, дает возможность достичь желаемой скорости на желаемом расстоянии, т.е. только при достижении события.
Выше было показано, что реализация профиля скорости требует лишь ограниченной вычислительной мощности, поскольку требуются только простые математические операции. Кроме того, она не требует предварительных измерений на предварительно заданных путях. Другими словами, это может быть обобщено для любого случая получения события ({расстояние, скорость}) всеми возможными средствами.
Изобретение относится к области автомобильных транспортных средств, в частности к способу определения профиля скорости, которому должно следовать транспортное средство (ТС). Способ содержит этапы получения данных о событии, включающих в себя расстояние до события и целевую скорость в этом событии для упомянутого транспортного средства, определения профиля скорости, которому должно следовать транспортное средство, в зависимости от времени между начальной скоростью и целевой скоростью в трех последовательных отдельных фазах. В первой фазе изменение ускорения устанавливают постоянным, равным заданному максимальному значению изменения ускорения, для того чтобы достичь оптимального целевого значения ускорения. Во второй фазе оптимальное целевое значение ускорения сохраняют постоянным. В третьей фазе изменение ускорения повторно устанавливают постоянным, чтобы достичь нулевого значения ускорения в конце третьей фазы, при этом упомянутое оптимальное целевое значение ускорения таково, чтобы расстояние, необходимое для выполнения трех фаз упомянутого профиля, было равно упомянутому расстоянию до события. Повышается комфорт водителя ТС при эксплуатации. 3 н. и 7 з.п. ф-лы, 4 ил., 1 табл.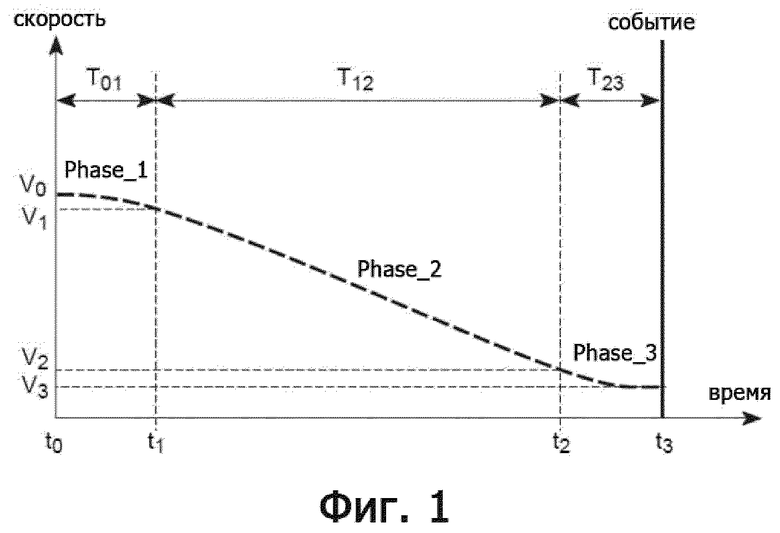
1. Способ определения профиля скорости, которому должно следовать автомобильное транспортное средство, содержащий этапы, на которых получают контекстуальную информацию об окружающей транспортное средство дорожной обстановке посредством мультисенсорной системы транспортного средства, извлекают данные о событии из полученной контекстуальной информации, причем указанные данные содержат по меньшей мере одно расстояние до события (Devent) относительно упомянутого транспортного средства и целевую скорость (V3) для упомянутого транспортного средства в этом событии, получают измеренную начальную скорость (V0) упомянутого транспортного средства, определяют профиль (P) скорости, которому должно следовать транспортное средство, как функцию времени, между указанной измеренной начальной скоростью и указанной целевой скоростью в трех последовательных отдельных фазах: в первой фазе (Phase_1), в которой изменение ускорения устанавливают постоянным, равным заданному максимальному значению изменения ускорения, чтобы достичь оптимального целевого значения ускорения (Atarget) в конце первой фазы; во второй фазе (Phase_2), в которой упомянутое оптимальное целевое значение ускорения сохраняют постоянным в течение всей продолжительности второй фазы; и в третьей фазе (Phase_3), в которой изменение ускорения повторно устанавливают постоянным, для того чтобы достичь нулевого значения ускорения в конце третьей фазы; при этом указанный способ содержит этап определения упомянутого оптимального целевого значения ускорения (Atarget) в течение второй фазы, так чтобы при применении упомянутого определенного оптимального целевого значения ускорения расстояние (Dprofil), необходимое для выполнения трех фаз упомянутого профиля, было равно упомянутому расстоянию до события (Devent).
2. Способ по п. 1, отличающийся тем, что расстояние, необходимое для выполнения трех фаз упомянутого профиля, вычисляют из набора уравнений, используемых для вычисления профиля скорости, этапы вычисления которого включают:
- вычисление продолжительности фаз (T01, T12, T23), а также начального и конечного времени, ограничивающего фазы,
- вычисление скоростей (V1, V2) прохождения в начальное и конечное время, ограничивающее вторую фазу,
- вычисление скорости как функции времени для каждой фазы, и
- вычисление пройденных расстояний в начальное и конечное время, ограничивающее фазы;
при этом вычисления выполняют для набора фиксированных параметров, включающих начальную скорость (V0) и начальное ускорение (Ainit) транспортного средства при запуске профиля скорости, целевую скорость (V3) в момент события и заданное максимальное значение изменения ускорения, а также для нефиксированного параметра, включающего оптимальное целевое ускорение, которое должно быть достигнуто во второй фазе профиля (Atarget).
3. Способ по п. 1 или 2, отличающийся тем, что определение упомянутого оптимального целевого значения ускорения выполняют исходя из предварительно заданного диапазона, ограниченного минимальным значением ускорения и максимальным значением ускорения, посредством итераций и деления пополам.
4. Способ по п. 3, отличающийся тем, что на каждой итерации расстояние, необходимое для создания профиля, рассчитывают с промежуточным значением ускорения, которое представляет собой барицентр двух значений ускорения, минимального и максимального.
5. Способ по любому из предыдущих пунктов, отличающийся тем, что на указанной третьей фазе изменение ускорения устанавливают постоянным, равным указанному заданному максимальному значению изменения ускорения на первой фазе.
6. Способ по любому из предшествующих пунктов, отличающийся тем, что на указанной третьей фазе изменение ускорения устанавливают постоянным, равным заданному максимальному значению изменения ускорения, отличному от упомянутого заданного максимального значения изменения ускорения на первой фазе.
7. Способ по любому из предшествующих пунктов, отличающийся тем, что упомянутое заданное максимальное значение изменения ускорения отличается в зависимости от того, относится ли профиль скорости к положительному ускорению или к отрицательному ускорению транспортного средства.
8. Способ по любому из предшествующих пунктов, отличающийся тем, что упомянутый профиль скорости передают в качестве инструкции в систему адаптивного управления скоростью, установленную на транспортном средстве.
9. Устройство, предназначенное для установки на борту автомобильного транспортного средства для осуществления способа по любому из предшествующих пунктов, содержащее мультисенсорную систему, способную получать контекстуальную информацию об окружающей транспортное средство дорожной обстановке, датчик скорости транспортного средства, средство для вычисления упомянутого профиля скорости в зависимости от данных о событии, извлекаемых из упомянутой получаемой контекстуальной информации, и средство управления для применения упомянутого вычисляемого профиля скорости системой адаптивного управления скоростью транспортного средства.
10. Автомобильное транспортное средство, характеризующееся тем, что оно содержит устройство по п. 9.
| US 8433493 B2, 30.04.2013 | |||
| US 9932038 B1, 03.04.2018 | |||
| EP 3144197 A1, 22.08.2016 | |||
| СПОСОБ И МОДУЛЬ ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2493979C2 |
