[Область техники, к которой относится изобретение]
[0001]
Настоящее изобретение относится к способу управления движением и устройству управления движением транспортного средства.
[Уровень техники]
[0002]
Известно устройство для прогнозирования маршрута транспортного средства, в котором, если встречное транспортное средство (транспортное средство, движущееся к рассматриваемому транспортному средству спереди рассматриваемого транспортного средства), движущееся по встречной полосе движения для рассматриваемого транспортного средства, обгоняет движущееся впереди транспортное средство для встречного транспортного средства, в ситуации, когда встречное транспортное средство отклоняется от встречной полосы движения на рассматриваемую полосу движения, определяется, обгоняет ли встречное транспортное средство движущееся впереди транспортное средство, и если определено, что встречное транспортное средство обгоняет движущееся впереди транспортное средство. Затем вычисляется вероятность реализации таким образом, что вероятность реализации представляет собой вероятность реализации маршрута, на котором транспортное средство пересекает полосу движения на противоположную сторону полосы движения, относительно более высокую, чем вероятность реализации, вычисленную, если определено, что встречное транспортное средство не обгоняет движущееся впереди транспортное средство (Патентный документ 1).
[Документ из уровня техники]
[Патентный Документ]
[0003]
[Патентный Документ 1] JP2010-097261A
[Раскрытие изобретения]
[Проблемы, решаемые изобретением]
[0004]
Обычное устройство для прогнозирования маршрута транспортного средства имеет функции для формирования множества маршрутов, которые могут быть приняты рассматриваемым транспортным средством на основании данных рассматриваемого транспортного средства. Множество возможных маршрутов включает в себя состояние, при котором рассматриваемое транспортное средство замедляется или останавливается, чтобы дождаться завершения обгона обгоняющим транспортным средством, когда следующее сзади транспортное средство обгоняет свое движущееся впереди транспортное средство на встречной полосе движения. См. абзац [0020] Патентного документа 1.
[0005]
Однако в вышеупомянутом Патентном документе 1 в ситуации, когда встречное транспортное средство отклоняется с встречной полосы движения на рассматриваемую полосу движения, чтобы обогнать свое движущееся впереди транспортное средство, в то время как рассматриваемое транспортное средство движется, не раскрыто содержание управления движением для рассматриваемого транспортного средства, представляющего собой замедление или остановку рассматриваемого транспортного средства. Теперь предположим, что рассматриваемое транспортное средство замедляется с постоянным замедлением, и ожидает, пока встречное транспортное средство не пройдет рассматриваемое транспортное средство. В таких случаях, если положение для расхождения со встречным транспортным средством близко к текущему положению рассматриваемого транспортного средства, например, если встречное транспортное средство заканчивает обгон на высокой скорости вопреки ожиданиям, увеличивается рывок (производное значение от ускорения или скорость изменения ускорения в единицу времени) во момент переключения на управление движением с ускорением. Это увеличение рывка вызывает дискомфорт у пользователя рассматриваемого транспортного средства.
[0006]
Задача, решаемая настоящим изобретением, состоит в создании способа управления движением и устройства управления движением для транспортного средства, которые могут уменьшить дискомфорт для пользователя в ситуации, в которой рассматриваемое транспортное средство и встречное транспортное средство расходятся друг с другом.
[Средства для решения проблем]
[0007]
Настоящее изобретение решает проблему, упомянутую выше, путем установки начального замедления рассматриваемого транспортного средства в случае, если время до того, как рассматриваемое транспортное средство и встречное транспортное средство разойдутся друг с другом, является относительно долгим, в меньшее значение, чем начальное замедление в случае, если упомянутое время является относительно коротким, если прогнозируется, что встречное транспортное средство, движущееся по встречной полосе
движения по отношению к полосе движения, по которой движется рассматриваемое транспортное средство, войдёт на полосу движения, по которой движется рассматриваемое транспортное средство; и выполнение управления движением с замедлением рассматриваемого транспортного средства.
[Эффект изобретения]
[0008]
Согласно настоящему изобретению, если прогнозируется, что встречное транспортное средство войдет в полосу движения рассматриваемого транспортного средства, управление движением с замедлением сначала выполняется с относительно небольшим замедлением. Это позволяет обеспечить длительное время отсрочки для определения того, следует ли остановить рассматриваемое транспортное средство или выполнить повторное ускорение. В результате рывок может быть уменьшен, если определено, что выполняется повторное ускорение, и дискомфорт пассажира может быть уменьшен.
[Краткое описание чертежей]
[0009]
Фиг.1 - блок-схема, иллюстрирующая вариант осуществления устройства управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 2A - блок-схема (1/3), иллюстрирующая процедуру процесса в ситуации расхождения, выполняемую в устройстве управления движением для транспортного средства, показанном на фиг. 1.
Фиг. 2B - блок-схема (2/3), иллюстрирующая процедуру процесса в ситуации расхождения, выполняемую в устройстве управления движением для транспортного средства, показанном на фиг. 1.
Фиг. 2C - это блок-схема (3/3), иллюстрирующая процедуру процесса в ситуации расхождения, выполняемую в устройстве управления движением для транспортного средства, показанном на фиг. 1.
Фиг.3 - вид сверху, иллюстрирующий первый пример ситуации расхождения, и график, иллюстрирующий профиль замедления, соответствующий этой ситуации.
Фиг.4 - вид сверху, иллюстрирующий второй пример ситуации расхождения, и график, иллюстрирующий профиль замедления, соответствующий этой ситуации.
Фиг.5 - вид сверху, иллюстрирующий третий пример ситуации расхождения, и график, иллюстрирующий профиль замедления, соответствующий этой ситуации.
Фиг.6 - вид сверху, иллюстрирующий четвертый пример ситуации расхождения, и график, иллюстрирующий профиль замедления, соответствующий этой ситуации.
Фиг.7 - вид сверху, иллюстрирующий пятый пример ситуации расхождения, и график, иллюстрирующий профиль замедления, соответствующий этой ситуации.
[Осуществление изобретения]
[0010]
Фиг.1 - это блок-схема, иллюстрирующая признаки устройства управления движением для транспортного средства VTC согласно настоящему варианту осуществления. Устройство управления движением также называется контроллером движения транспортного средства (VTC). Фиг. 3-7 представляют собой виды сверху, иллюстрирующие примеры ситуаций расхождения, и графики, иллюстрирующие профили замедления, соответствующие упомянутым ситуациям. Устройство управления движением для транспортного средства VTC по настоящему варианту осуществления также представляет собой вариант осуществления, реализующий способ управления движением для транспортного средства согласно настоящему изобретению. Как показано на фиг. 1, устройство управления движением для транспортного средства VTC по настоящему варианту осуществления включает в себя радарное устройство 11, камеру 12, картографическую базу 13 данных, устройство 14 обнаружения положения, датчик 15 скорости транспортного средства, блок 21 прогнозирования маршрута встречного транспортного средства, блок 22 прогнозирования маршрута рассматриваемого транспортного средства, блок 23 определения возможности движения, блок 24 формирования целевой скорости транспортного средства и блок 25 управления отслеживанием скорости транспортного средства. При этом, в числе блоков и устройств, показанных на фиг. 1, устройство 51 управления движением, двигатель 52, устройство 53 управления тормозом и тормоз 54 являются компонентами транспортного средства. Кроме того, понятия рассматриваемого транспортного средства V1, встречного транспортного средства V2, припаркованного транспортного средства V3, полосы движения L1, встречной полосы движения L2, текущего положения P1 рассматриваемого транспортного средства V1, положения P2 остановки рассматриваемого транспортного средства V1, положения P3 расхождения, положения P4 начала замедления и маршрута R встречного транспортного средства V2 связаны с ситуациями движения, показанными на фиг. 3 - 7. Упомянутые понятия поясняются ниже.
[0011]
Среди блоков, составляющих устройство управления движением для транспортного средства VTC, радарное устройство 11, камера 12, устройство 14 обнаружения положения и датчик 15 скорости транспортного средства состоят из различных датчиков, как описано ниже. Картографическая база 13 данных состоит из памяти. Кроме того, среди блоков, составляющих устройство управления движением для транспортного средства VTC, блок 21 прогнозирования маршрута встречного транспортного средства, блок 22 прогнозирования маршрута рассматриваемого транспортного средства, блок 23 определения возможности движения, блок 24 формирования целевой скорости транспортного средства и блок 25 управления отслеживанием скорости транспортного средства состоят из одного или более компьютеров и программного обеспечения, установленного на упомянутых компьютерах. Компьютер содержит ПЗУ, сохраняющее программу, побуждающую функционировать соответствующие блоки, такие как блок 21 прогнозирования маршрута встречного транспортного средства, блок 22 прогнозирования маршрута рассматриваемого транспортного средства, блок 23 определения возможности движения, блок 24 формирования целевой скорости транспортного средства и блок 25 управления отслеживанием скорости транспортного средства, ЦП, выполняющий программу, сохранённую в ПЗУ, и ОЗУ, функционирующее в качестве запоминающего устройства с возможностью осуществления доступа. В качестве управляющих схем вместо ЦП или вместе с ним можно использовать MPU, DSP, ASIC, FPGA и тому подобное.
[0012]
Радарное устройство 11 содержит лазерный дальномер (LRF), предусмотренный в передней части транспортного средства, и/или радар, использующий миллиметровые волны или ультразвуковые волны. Радарное устройство 11 выдает информационный сигнал о цели или препятствии блоку 21 прогнозирования маршрута встречного транспортного средства. Лазерный дальномер излучает лазерный луч, который представляет собой выходную волну для измерения расстояния, в область перед транспортным средством, и обнаруживает отраженную волну (волну обнаружения). Это формирует сигнал определения расстояния, указывающий цель в окружении транспортного средства и взаимное расположение между целью и транспортным средством. Целью является, например, другое транспортное средство, движущееся по доступной для движения дороге, по которой движется упомянутое транспортное средство, мотоцикл, велосипед, пешеход, линия разделения полос движения на поверхности дороги, бордюр на обочине дороги, ограждение, поверхность стены, насыпь и тому подобное. Кроме того, радар, использующий миллиметровые или ультразвуковые волны, излучает миллиметровые или ультразвуковые волны перед транспортным средством для сканирования заданной области в окружении рассматриваемого транспортного средства. Это позволяет обнаруживать препятствия, такие как другое транспортное средство, мотоцикл, велосипед, пешеход, бордюр обочины дороги, ограждение, поверхность стены и насыпь, которые присутствуют в окружении рассматриваемого транспортного средства. Например, радар определяет взаимное расположение (азимутальное направление) между препятствием и рассматриваемым транспортным средством, относительную скорость препятствия, расстояние между рассматриваемым транспортным средством и препятствием и тому подобное в качестве ситуации в окружении рассматриваемого транспортного средства.
[0013]
Камера 12 предусмотрена впереди транспортного средства, сзади транспортного средства и сбоку от транспортного средства (то есть по всей окружности транспортного средства) и выводит информационный сигнал о цели и препятствии в блок 21 прогнозирования маршрута встречного транспортного средства и блок 22 прогнозирования маршрута рассматриваемого транспортного средства. Камера 12 представляет собой датчик изображения для получения данных изображения путем съёмки заданной области впереди, сзади или сбоку рассматриваемого транспортного средства и включает в себя, например, широкоугольную камеру с CCD, расположенную в верхней части переднего лобового стекла в салоне транспортного средства, в левом и правом зеркалах, в крышке багажника и тому подобном. Камера 12 может быть стереоскопической камерой или всенаправленной камерой и может включать в себя множество датчиков изображения. Камера 12 обнаруживает дорогу, присутствующую впереди, сзади или сбоку от рассматриваемого транспортного средства, и постройку, дорожный знак, указатель, другое транспортное средство, мотоцикл, велосипед, пешехода и тому подобное в качестве ситуации в окружении рассматриваемого транспортного средства из полученных данных изображения.
[0014]
Картографическая база 13 данных сохраняет трехмерную картографическую информацию с высоким разрешением. Картографическая база 13 данных представляет собой память с возможностью осуществления доступа из блока 21 прогнозирования маршрута встречного транспортного средства и блока 22 прогнозирования маршрута рассматриваемого транспортного средства. Трёхмерная картографическая информация с высоким разрешением, сохранённая в картографической базе 13 данных, представляет собой трёхмерную картографическую информацию, основанную на форме дороги, обнаруживаемой, когда транспортное средство для получения данных фактически движется по упомянутой дороге. Трехмерная картографическая информация с высоким разрешением представляет собой картографическую информацию, к которой в качестве трехмерной информации вместе с картографической информацией также относятся подробная информация о положении с высоким разрешением, такая как точка слияния дороги, точка разветвления, пункт оплаты проезда, положение, в котором количество полос движения уменьшается, зона обслуживания, зона парковки и тому подобное.
[0015]
Устройство 14 обнаружения положения содержит блок GPS, гироскопический датчик и датчик скорости транспортного средства и тому подобное. Устройство 14 обнаружения положения обнаруживает радиоволны, передаваемые по множеству спутниковых каналов связи, посредством блока GPS, и периодически получает информацию о положении для рассматриваемого транспортного средства. В то же время устройство 14 обнаружения положения обнаруживает информацию о текущем положении рассматриваемого транспортного средства на основании полученной информации о положении рассматриваемого транспортного средства, информации об изменении угла, полученной от гироскопического датчика, и скорости транспортного средства, полученной от датчика скорости транспортного средства. Обнаруженная информация о положении рассматриваемого транспортного средства выводится в блок 21 прогнозирования маршрута встречного транспортного средства и блок 22 прогнозирования маршрута рассматриваемого транспортного средства.
[0016]
Датчик 15 скорости транспортного средства измеряет скорость вращения трансмиссии транспортного средства, такой как приводной вал, и обнаруживает скорость движения рассматриваемого транспортного средства на основании результата упомянутого измерения. Ниже скорость движения также называется «скоростью транспортного средства». Информация о скорости транспортного средства для рассматриваемого транспортного средства, обнаруживаемой датчиком 15 скорости транспортного средства, выводится в блок 22 прогнозирования маршрута рассматриваемого транспортного средства и блок 24 формирования целевой скорости транспортного средства.
[0017]
Блок 21 прогнозирования маршрута встречного транспортного средства получает расстояние между рассматриваемым транспортным средством и целью в окружении рассматриваемого транспортного средства, выдаваемое радарным устройством 11, и данные изображения в окружении рассматриваемого транспортного средства, выдаваемые камерой 12 в заданный интервал времени. Таким образом, блок 21 прогнозирования маршрута встречного транспортного средства обнаруживает, присутствует ли другое транспортное средство в окружении рассматриваемого транспортного средства. Кроме того, блок 21 прогнозирования маршрута встречного транспортного средства обнаруживает, является ли обнаруженное другое транспортное средство встречным транспортным средством, движущимся по полосе движения, встречной по отношению к полосе движения, по которой движется рассматриваемое транспортное средство. Если обнаруженное другое транспортное средство является встречным транспортным средством, прогнозируется, войдёт ли встречное транспортное средство на полосу движения, по которой движется рассматриваемое транспортное средство. И если прогнозируется, что встречное транспортное средство войдёт на полосу движения, по которой движется рассматриваемое транспортное средство, прогнозируется маршрут R приближения встречного транспортного средства.
[0018]
Функции блока 21 прогнозирования маршрута встречного транспортного средства объясняются на основании ситуации движения, показанной на фиг.3. В ситуации движения, показанной на фиг.3, на дороге с двумя полосами движения, на которой осуществляется левостороннее движение, рассматриваемое транспортное средство V1 движется по полосе L1 движения слева на фиг.3, а встречное транспортное средство V2 движется по встречной полосе L2 движения справа на фиг. 3. В ситуации движения, показанной на фиг. 3, припаркованное транспортное средство V3 припарковано впереди встречного транспортного средства V2 на встречной полосе L2 движения. По этой причине в ситуации движения, показанной на фиг. 3, встречное транспортное средство V2 движется по маршруту R приближения, который отклоняется на полосу L1 движения, чтобы объехать припаркованное транспортное средство V3.
[0019]
В такой ситуации движения блок 21 прогнозирования маршрута встречного транспортного средства устройства управления движением VTC, установленного на рассматриваемом транспортном средстве V1, обнаруживает присутствие встречного транспортного средства V2 и припаркованного транспортного средства V3 из информационного сигнала от радарного устройства 11 и камеры 12. В то же время блок 21 прогнозирования маршрута встречного транспортного средства распознает дорожную информацию в окружении рассматриваемого транспортного средства V1 по информационному сигналу из картографической базы 13 данных и устройства 14 обнаружения положения. Блок 21 прогнозирования маршрута встречного транспортного средства распознает, что рассматриваемое транспортное средство V1 движется по полосе L1 движения, встречное транспортное средство V2 движется по встречной полосе L2 движения по отношению к рассматриваемому транспортному средству V1, а припаркованное транспортное средство V3 припарковано на встречной полосе L2 движения впереди встречного транспортного средства V2. В то же время, блок 21 прогнозирования маршрута встречного транспортного средства обнаруживает скорость транспортного средства для рассматриваемого транспортного средства V1, скорость транспортного средства для встречного транспортного средства V2, скорость транспортного средства для припаркованного транспортного средства V3, расстояние между рассматриваемым транспортным средством V1 и встречным транспортным средством V2, расстояние между рассматриваемым транспортным средством V1 и припаркованным транспортным средством V3, и траекторию встречного транспортного средства V2. Траектория встречного транспортного средства V2 представляет собой изменение во времени положения встречного транспортного средства V2. Отметим, что встречное транспортное средство V2 не ограничено транспортным средством, движущимся по встречной полосе L2 движения, и включает в себя транспортное средство, движущееся к рассматриваемому транспортному средству, отклоняясь от встречной полосы L2 движения.
[0020]
С помощью этих информационных сигналов блок 21 прогнозирования маршрута встречного транспортного средства обнаруживает, присутствуют ли другие транспортные средства V2, V3 в окружении рассматриваемого транспортного средства V1. Затем обнаруживается, являются ли обнаруженные другие транспортные средства V2, V3 встречным транспортным средством V2, которое движется по встречной полосе L2 движения по отношению к полосе L1 движения, по которой движется рассматриваемое транспортное средство V1. Если обнаруженные другие транспортные средства V2, V3 представляют собой встречное транспортное средство V2, прогнозируется, войдёт ли встречное транспортное средство V2 на полосу L1 движения, по которой движется рассматриваемое транспортное средство V1. Если прогнозируется, что встречное транспортное средство V2 войдет в полосу L1 движения, по которой движется рассматриваемое транспортное средство V1, чтобы уклониться от припаркованного транспортного средства V3, также прогнозируется маршрут R приближения.
[0021]
Отметим, что то, войдёт ли встречное транспортное средство V2 на полосу L1 движения, по которой движется рассматриваемое транспортное средство V1, можно прогнозировать на основании таких условий, как то, направлена ли траектория встречного транспортного средства V2 на полосу L1 движения, по которой движется рассматриваемое транспортное средство V1, причем траектория встречного транспортного средства V2 определяется изменением во времени положения встречного транспортного средства V2, или тем, присутствует ли припаркованное транспортное средство V3 на встречной полосе L2 движения, находится ли встречное транспортное средство V2 достаточно близко к припаркованному транспортному средству V3 по сравнению с расстоянием между рассматриваемым транспортным средством V1 и припаркованным транспортным средством V3, и находится ли встречное транспортное средство V2 в ситуации, позволяющей объехать припаркованное транспортное средство V3 за достаточное время. Маршрут R приближения встречного транспортного средства V2 может быть спрогнозирован на основании условий положения и скорости транспортного средства для встречного транспортного средства V2, формы дороги встречной полосы L2 движения и полосы L1 движения, и положения и формы (размера) припаркованного транспортного средства V3.
[0022]
Как описано выше, блок 21 прогнозирования маршрута встречного транспортного средства получает текущее положение, скорость транспортного средства и маршрут R приближения встречного транспортного средства V2, входящего на полосу L1 движения, по которой движется рассматриваемое транспортное средство V1. Блок 21 прогнозирования маршрута встречного транспортного средства выводит эти информационные сигналы в блок 23 определения возможности движения через заданный интервал времени. Текущее положение, скорость транспортного средства и маршрут R приближения встречного транспортного средства V2, входящего на полосу L1 движения, по которой движется рассматриваемое транспортное средство V1, время от времени изменяются по мере того, как проходит время движения рассматриваемого транспортного средства V1. Следовательно, блок 21 прогнозирования маршрута встречного транспортного средства повторяет вычисление в заданный интервал времени и выводит его в блок 23 определения возможности движения.
[0023]
Блок 22 прогнозирования маршрута рассматриваемого транспортного средства формирует маршрут движения, соответствующий пункту назначения, который заранее введён водителем. Блок 22 прогнозирования маршрута рассматриваемого транспортного средства распознает текущее положение рассматриваемого транспортного средства V1 по информационному сигналу от устройства 14 обнаружения положения, чтобы вести рассматриваемое транспортное средство V1 по маршруту движения. Блок 22 прогнозирования маршрута рассматриваемого транспортного средства распознает полосу L1 движения рассматриваемого транспортного средства V1 по информационному сигналу из картографической базы 13 данных. Кроме того, блок 22 прогнозирования маршрута рассматриваемого транспортного средства распознает скорость транспортного средства для рассматриваемого транспортного средства V1 по информационному сигналу от датчика 15 скорости транспортного средства. Затем блок 22 прогнозирования маршрута рассматриваемого транспортного средства получает информационный сигнал о цели и препятствии в окружении рассматриваемого транспортного средства V1 от камеры 12 в заданный интервал времени. В результате рассматриваемое транспортное средство V1 движется по полосе L1 движения. В то же время, для соблюдения правил дорожного движения блок 22 прогнозирования маршрута рассматриваемого транспортного средства выполняет управление скоростью в соответствии с целью, такой как светофор, пешеходный переход или знак остановки, когда они обнаружены. Кроме того, если камера 12 обнаруживает препятствие, такое как пешеход или другое транспортное средство, выполняется управление скоростью или управление траекторией, чтобы избежать контакта с препятствием. Блок 22 прогнозирования маршрута рассматриваемого транспортного средства определяет маршрут движения, текущее положение и скорость транспортного средства для рассматриваемого транспортного средства V1, как описано выше. Затем блок 22 прогнозирования маршрута рассматриваемого транспортного средства выводит эти информационные сигналы в блок 23 определения возможности движения в заданном интервале времени. Маршрут движения, текущее положение и скорость транспортного средства для рассматриваемого транспортного средства V1 время от времени изменяются по мере того, как проходит время движения рассматриваемого транспортного средства V1. Следовательно, блок 22 прогнозирования маршрута рассматриваемого транспортного средства повторяет вычисления в заданном интервале времени и выводит их в блок 23 определения возможности движения.
[0024]
Сначала блок 23 определения возможности движения определяет, соприкасается ли рассматриваемое транспортное средство V1 со встречным транспортным средством V2, если рассматриваемое транспортное средство V1 движется с текущей скоростью без замедления. Таким образом, блок 23 определения возможности движения определяет, могут ли рассматриваемое транспортное средство V1 и встречное транспортное средство V2 разойтись друг с другом, не соприкасаясь друг с другом в ситуации движения, показанной на фиг. 3, на основании текущего положения, скорости транспортного средства и маршрута R приближения встречного транспортного средства V2, выводимых из блока 21 прогнозирования маршрута встречного транспортного средства, и маршрута движения, текущего положения и скорости транспортного средства для рассматриваемого транспортного средства V1, выводимых из блока 22 прогнозирования маршрута рассматриваемого транспортного средства.
[0025]
При этом определении блок 23 определения возможности движения устанавливает положение P2 остановки рассматриваемого транспортного средства V1 из маршрута R приближения встречного транспортного средства V2. В ситуации движения, показанной на фиг.3, маршрут R приближения встречного транспортного средства V2 прогнозируется блоком 21 прогнозирования маршрута встречного транспортного средства. И устанавливается положение остановки рассматриваемого транспортного средства V1, которое не соприкасается со встречным транспортным средством V2, движущимся по маршруту R приближения. В частности, как показано на фиг.3, положение перед тем, как встречное транспортное средство V2 сменит полосу движения для возвращения из полосы L1 движения, в которую вошло встречное транспортное средство V2, в исходную встречную полосу L2 движения, устанавливается в качестве положения P2 остановки рассматриваемого транспортного средства V1. Положение P2 остановки может быть установлено только посредством маршрута R приближения встречного транспортного средства V2, независимо от текущего положения или скорости транспортного средства для рассматриваемого транспортного средства V1. В качестве альтернативы, положение P2 остановки может быть установлено на заданном расстоянии от припаркованного транспортного средства V3 на основании, например, положения припаркованного транспортного средства V3 на встречной полосе L2 движения.
[0026]
В ситуации движения, показанной на фиг.3, предполагается, что расстояние между текущим положением рассматриваемого транспортного средства V1 и встречным транспортным средством V2 обнаруживается как L, скорость транспортного средства для рассматриваемого транспортного средства V1 обнаруживается как v1, и скорость транспортного средства для встречного транспортного средства V2 обнаруживается как v2. В этом случае, поскольку время t до встречи (соприкосновения) двух транспортных средств составляет L/(v1+v2), положение встречи представляет собой положение, в котором рассматриваемое транспортное средство V1 перемещается из текущего положения P1 на L v1/(v1+v2). Если место встречи находится на ближней стороне (ближе к рассматриваемому транспортному средству V1) по отношению к положению P2 остановки, как показано на фиг.3, или если оно находится на дальней стороне для припаркованного транспортного средства V3, в настоящее время определяется, что рассматриваемое транспортное средство V1 может разойтись со встречным транспортным средством V2, не соприкасаясь со встречным транспортным средством V2, даже если рассматриваемое транспортное средство V1 движется с текущей скоростью без замедления. В этом случае информационный сигнал «расхождение возможно» выводится в блок 24 формирования целевой скорости транспортного средства, и предшествующее управление скоростью продолжается.
[0027]
С другой стороны, блок 23 определения возможности движения выполняет управление движением с замедлением, если определено, что рассматриваемое транспортное средство V1 соприкоснётся со встречным транспортным средством V2, если рассматриваемое транспортное средство V1 будет двигаться с текущей скоростью без замедления. Другими словами, блок 23 определения возможности движения устанавливает целевой профиль скорости транспортного средства для управления движением с заданным опорным замедлением б, чтобы выполнять управление движением с замедлением для остановки рассматриваемого транспортного средства V1 в положении P2 остановки. Затем блок 23 определения возможности движения вычисляет положение P3 расхождения, в котором рассматриваемое транспортное средство V1 и встречное транспортное средство V2 разойдутся друг с другом, на основании профиля целевой скорости транспортного средства и скорости транспортного средства для встречного транспортного средства V2. Затем блок 23 определения возможности движения выдает в блок 24 формирования целевой скорости транспортного средства в заданный интервал времени то, могут ли рассматриваемое транспортное средство V1 и встречное транспортное средство V2 разойтись друг с другом, расстояние между текущим положением рассматриваемого транспортного средства V1 и положением остановки, положение P3 расхождения, в котором рассматриваемое транспортное средство V1 и встречное транспортное средство V2 разойдутся друг с другом, и положение P4 начала замедления.
[0028]
Положение Р4 начала замедления и положение Р3 расхождения можно определить следующим образом. В ситуации движения, показанной на фиг. 3, положение P2 остановки рассматриваемого транспортного средства V1 устанавливается на основании маршрута R приближения встречного транспортного средства V2. Сначала устанавливается заданное опорное замедление б, которое позволяет остановиться в положении P2 остановки. Например, б устанавливается от 1,0 до 1,4 м/с2, что является более мягким замедлением, не вызывающим дискомфорта у пользователя. Кривая скорости транспортного средства с использованием б показана на фиг. 3 в виде параболы профиля целевой скорости. Пересечение прямой линии, представляющей текущую скорость транспортного средства V1 для рассматриваемого транспортного средства, и параболы профиля целевой скорости определяется как положение P4 начала замедления рассматриваемого транспортного средства V1. Когда рассматриваемое транспортное средство V1 движется, поддерживая текущую скорость транспортного средства, и начинает замедление в соответствии с опорным замедлением б целевого профиля скорости в положении начала P4 замедления, рассматриваемое транспортное средство V1 замедляется со скоростью в соответствии с профилем целевой скорости и останавливается в положении P2 остановки . Положение P3 расхождения, в котором рассматриваемое транспортное средство V1 и встречное транспортное средство V2 разойдутся друг с другом, вычисляется из профиля целевой скорости и скорости транспортного средства для встречного транспортного средства V2 в этот момент времени.
[0029]
Если положение P3 расхождения находится на ближней стороне (ближе к рассматриваемому транспортному средству V1) относительно положения P2 остановки, как показано на фиг. 3-5, определяется, что в настоящее время рассматриваемое транспортное средство V1 может разойтись со встречным транспортным средством V2, не соприкасаясь со встречным транспортным средством V2, пока рассматриваемое транспортное средство V1 движется со скоростью в соответствии с профилем целевой скорости. С другой стороны, если положение P3 расхождения находится на дальней стороне относительно положения P2 остановки, как показано на фиг.6, определяется, что в настоящее время рассматриваемое транспортное средство V1 соприкоснётся со встречным транспортным средством V2, даже если рассматриваемое транспортное средство V1 движется со скоростью в соответствии с заданным профилем скорости. Если положение P3 расхождения находится на ближней стороне относительно положения P2 остановки, как показано на фиг. 3-5, блок 23 определения возможности движения выводит информационный сигнал «возможно расхождение при замедлении с опорным замедлением б» в блок 24 формирования целевой скорости транспортного средства. С другой стороны, если положение P3 расхождения находится на дальней стороне относительно положения P2 остановки, как показано на фиг. 6, на блок 24 формирования целевой скорости транспортного средства выводится информационный сигнал «расхождение невозможно даже при замедлении с опорным замедлением б». В то же время блок 23 определения возможности движения выводит расстояние между текущим положением и положением остановки рассматриваемого транспортного средства V1, положением P3 расхождения, в котором рассматриваемое транспортное средство V1 и встречное транспортное средство V2 разойдутся друг с другом, и. положение P4 начала замедления в блок 24 формирования целевой скорости транспортного средства.
[0030]
Блок 24 формирования целевой скорости транспортного средства получает определение возможности движения, положение P4 начала замедления, положение P3 расхождения и расстояние до положения P2 остановки от блока 23 определения возможности движения, и скорость транспортного средства для рассматриваемого транспортного средства V1 от датчика 15 скорости транспортного средства через заданный интервал времени. Кроме того, блок 24 формирования целевой скорости транспортного средства вычисляет и устанавливает начальное замедление на раннем этапе, когда рассматриваемое транспортное средство V1 переключается на управление движением с замедлением. Вместе с этим блок 24 формирования целевой скорости транспортного средства устанавливает окончательное замедление от точки окончания управления замедлением с начальным замедлением до точки, в которой управление движением с замедлением окончательно завершается. Затем блок 24 формирования целевой скорости транспортного средства выводит установленное начальное замедление б1 и установленное окончательное замедление б2 в блок 25 управления отслеживанием скорости транспортного средства.
[0031]
Блок 241 установки начального замедления вычисляет начальное замедление на раннем этапе, когда рассматриваемое транспортное средство V1 переключается на управление движением с замедлением. Блок 242 установки окончательного замедления вычисляет окончательное замедление от точки окончания управления замедлением с начальным замедлением до точки, в которой управление движением с замедлением окончательно завершается. Отметим, что в зависимости от ситуации движения начальное замедление может замениться окончательным замедлением.
[0032]
То есть блок 24 формирования целевой скорости транспортного средства устанавливает профиль замедления, в котором замедление между положением P4 начала замедления и положением P2 остановки уменьшается (включая замедление, равное 0), по мере того, как время до момента, когда рассматриваемое транспортное средство V1 разойдётся со встречным транспортным средством V2, увеличивается, по сравнению со случаем, в котором время расхождения друг с другом сокращается. Блок 24 формирования целевой скорости транспортного средства выполняет управление движением с замедлением с замедлением в соответствии с профилем замедления. Другими словами, начальное замедление б1 в положении P4 начала замедления установлено на меньшее замедление, чем окончательное замедление б2 непосредственно перед положением P2 остановки. Другими словами, вместо установки замедления между положением P4 начала замедления и положением P2 остановки на постоянное замедление устанавливается множество различных значений замедления, и множество различных значений замедления устанавливается меньшим, по мере того, как положение рассматриваемого транспортного средства V1 приближается к положению P4 начала замедления (то есть поскольку время, прошедшее с момента начала замедления, короче).
[0033]
В ситуации движения, показанной на фиг.3, блок 241 установки начального замедления блока 24 формирования целевой скорости транспортного средства устанавливает начальное замедление б1 между положением P4 начала замедления и точкой, в которой замедление переключается на значение меньше замедления б профиля целевой скорости по отношению к замедлению б профиля целевой скорости (т.е. б больше б1, и абсолютное значение наклона показанного графика невелико). Блок 242 установки окончательного замедления блока 24 формирования целевой скорости транспортного средства устанавливает окончательное замедление б2 между положением, в котором замедление переключается, и положением остановки P2, большим, чем начальное замедление б1, и большим, чем замедление б профиля целевой скорости (т.е. б2 больше б, и б больше б1, и абсолютное значение наклона показанного графика больше).
[0034]
Кроме того, блок 241 установки начального замедления блока 24 формирования целевой скорости транспортного средства может устанавливать фиксированное значение, определенное заранее, в качестве начального замедления б1, при установке начального замедления б1. Фиксированное значение составляет, например, от 0 до 0,7 м/с2 по отношению к опорному замедлению от 1,0 до 1,4 м/с2. Кроме того, фиксированное значение может быть значением, соответствующим расстоянию между положением P3 расхождения и положением P2 остановки. Ситуации движения, показанные на фиг. 4 и фиг. 5, обозначают ситуации, в которых различаются соответствующие расстояния между положением P3 расхождения и положением P2 остановки, определенные блоком 23 определения возможности движения. Расстояние между положением P3 расхождения и положением P2 остановки в ситуации движения, показанной на фиг. 4, больше, чем расстояние между положением P3 расхождения и положением P2 остановки в ситуации движения, показанной на фиг. 5. Кроме того, блок 241 установки начального замедления блока 24 формирования целевой скорости транспортного средства устанавливает меньшее начальное замедление, поскольку расстояние между положением P2 остановки и положением P3 расхождения больше (фиг.4) по сравнению со случаем, когда расстояние между положением P2 остановки и положением P3 расхождения меньше (фиг. 5).
[0035]
То есть абсолютное значение крутизны начального замедления на фиг. 4 установлено меньшим, чем абсолютное значение крутизны начального замедления на фиг. 5. То, что расстояние между положением P2 остановки и положением P3 расхождения больше, означает, что положение, в котором рассматриваемое транспортное средство V1 и встречное транспортное средство V2 разойдутся друг с другом, находится на ближней стороне относительно положения P2 остановки при замедлении с опорным замедлением. Таким образом, весьма вероятно, что встречное транспортное средство V2 вернется на исходную встречную полосу L2 движения по прошествии относительно короткого времени. Следовательно, путем установки небольшого начального замедления можно наблюдать последующее движение встречного транспортного средства V2, и ненужное замедление может быть уменьшено.
[0036]
Начальное замедление б1 может содержать множество значений б11, б12, .... начального замедления. В этом случае последнее начальное замедление, то есть начальное замедление непосредственно перед переключением на окончательное замедление, предпочтительно устанавливается в наименьшее начальное замедление из множества значений начального замедления. Это связано с тем, что установка последнего начального замедления в наименьшее замедление уменьшает рывок при переходе от управления движением с замедлением к управлению движением с повторным ускорением.
[0037]
Блок 242 установки окончательного замедления блока 24 формирования целевой скорости транспортного средства устанавливает замедление, с которым рассматриваемое транспортное средство V1 может быть остановлено в положении P2 остановки, на основании начального замедления б1, времени переключения с начального замедления б1, и расстояния до положения P2 остановки. Например, окончательное замедление б2 может представлять собой заданное фиксированное значение в пределах предельных величин замедления, при которых пользователь не испытывает дискомфорта. Фиксированные значения могут составлять, например, от 1,8 до 2,2 м/с2 по отношению к опорному замедлению от 1,0 до 1,4 м/с2. В ситуации движения, показанной на фиг. 3, окончательное замедление б2, которое представляет собой заданное фиксированное значение, устанавливается таким образом, что рассматриваемое транспортное средство V1 останавливается в положении P2 остановки. Пересечение профиля скорости в соответствии с окончательным замедлением б2 и начальным замедлением б1 определяется как положение переключения (момент переключения) для переключения с начального замедления б1 на окончательное замедление б2. Следует отметить, что окончательное замедление б2 может включать в себя множество значений б21, б22 .... окончательного замедления.
[0038]
Если определено, что рассматриваемое транспортное средство V1 может быть остановлено в положении P2 остановки при заданном окончательном замедлении, управление движением с замедлением продолжается с окончательным замедлением. С другой стороны, если определено что рассматриваемое транспортное средство V1 не может остановиться в положении P2 остановки при заданном окончательном замедлении (например, если скорость транспортного средства для встречного транспортного средства V2 уменьшилась, а положение P3 расхождения неожиданно переместилось в положение P2 остановки), блок 242 установки окончательного замедления отдает приоритет управлению остановкой рассматриваемого транспортного средства V1 и переустанавливает окончательное замедление больше заданного окончательного замедления.
[0039]
Если положение P3 расхождения между рассматриваемым транспортным средством V1 и встречным транспортным средством V2 находится на стороне встречного транспортного средства V2 относительно положения P2 остановки, как показано на фиг.6 (например, если встречное транспортное средство V2 внезапно входит в полосу L1 движения), блок 241 установки начального замедления и блок 242 установки окончательного замедления блока 24 формирования целевой скорости транспортного средства устанавливают опорное замедление б в качестве окончательного замедления вместо установки начального замедления б1. Определяется, может ли рассматриваемое транспортное средство V1 быть остановлено в положении P2 остановки на основании заданного окончательного замедления б, текущего положения P1 рассматриваемого транспортного средства V1, текущей скорости транспортного средства для рассматриваемого транспортного средства V1 и положения P2 остановки. Если определено, что рассматриваемое транспортное средство V1 может быть остановлено в положении P2 остановки, опорное замедление б устанавливается равным окончательному замедлению б2. С другой стороны, если определено, что рассматриваемое транспортное средство V1 не может остановиться в положении P2 остановки при опорном замедлении б, управление остановкой рассматриваемого транспортного средства V1 имеет приоритет, и устанавливается окончательное замедление б2 больше опорного замедления б.
[0040]
Блок 25 управления отслеживанием скорости транспортного средства получает начальное замедление б1 и окончательное замедление б2, формируемые блоком 241 установки начального замедления и блоком 242 установки окончательного замедления блока 24 формирования целевой скорости транспортного средства. Блок 25 управления отслеживанием скорости транспортного средства формирует скорость транспортного средства для рассматриваемого транспортного средства V1 в соответствии с текущим положением рассматриваемого транспортного средства V1. Блок 25 управления отслеживанием скорости транспортного средства выводит информационный сигнал на устройство 51 управления движением и устройство 53 управления тормозом, предусмотренные в контроллере транспортного средства в рассматриваемом транспортном средстве V1.
[0041]
Рассматриваемое транспортное средство V1 содержит двигатель 52, который является источником привода, и тормоз 54, который является источником торможения. Двигатель 52 управляется устройством 51 управления движением. Тормоз 54 (усилитель тормоза) управляется устройством 53 управления тормозами. Затем сигнал скорости транспортного средства от блока 25 управления отслеживанием скорости транспортного средства вводится в каждое из устройства 51 управления движением и устройства 53 управления тормозом. Таким образом, выполняется управление движением с ускорением, управление движением с постоянной скоростью или управление движением с замедлением рассматриваемого транспортного средства V1. Отметим, что транспортное средство по настоящему изобретению не ограничено конкретно. Транспортное средство включает в себя электрические транспортные средства (включая транспортные средства на топливных элементах), приводимые в действие моторами в качестве источника привода, гибридные транспортные средства, содержащие как двигатель, так и мотор, в дополнение к транспортным средствам с двигателями, приводимым в действие бензиновыми двигателями или дизельными двигателями в качестве источника привода.
[0042]
Ниже описана последовательность операций управления для устройства управления движением VTC по настоящему варианту осуществления. Блок-схемы, показанные на фиг. 2A и фиг. 2B, иллюстрируют процедуру процесса в ситуации расхождения, выполняемого устройством управления движением VTC, показанным на фиг. 1. Блок-схемы выполняются через заданные интервалы времени.
[0043]
На этапе S1 процедуры предполагается, что рассматриваемое транспортное средство V1 автономно движется в направлении пункта назначения посредством функции автономного движения. На этапе S2 во время автономного движения рассматриваемого транспортного средства V1 блок 21 прогнозирования маршрута встречного транспортного средства устройства управления движением VTC обнаруживает, присутствует ли встречное транспортное средство V2, движущееся по противоположной полосе L2 движения по относительно рассматриваемого транспортного средства V1 посредством радарного устройства 11 и камеры 12. Если присутствует встречное транспортное средство V2, движущееся по встречной полосе L2 движения, на этапе S3 прогнозируется, войдёт ли встречное транспортное средство V2 на полосу L1 движения, по которой движется рассматриваемое транспортное средство V1. Если на этапе S2 не обнаружено встречное транспортное средство V2, и даже если встречное транспортное средство V2 присутствует, если прогнозируется, что встречное транспортное средство V2 не войдёт в полосу L1 движения, по которой движется рассматриваемое транспортное средство V1, на этапе S3, процесс возвращается к этапу S1, и автономное движение продолжается. Отметим, что, если на этапе S2 обнаружено встречное транспортное средство V2, также может обнаруживаться расстояние между рассматриваемым транспортным средством V1 и встречным транспортным средством V2, и если расстояние короче заданного расстояния, может выполняться управление движением с замедлением рассматриваемого транспортного средства V1 с большим замедлением, соответствующим экстренному торможению.
[0044]
На этапе S3, если прогнозируется, что встречное транспортное средство V2 войдёт в полосу L1 движения, по которой движется рассматриваемое транспортное средство V1, процесс переходит к этапу S4. На этапе S4 блок 23 определения возможности движения определяет, может ли рассматриваемое транспортное средство V1 разойтись со встречным транспортным средством V2, не соприкасаясь со встречным транспортным средством V2, в случае, если рассматриваемое транспортное средство V1 движется с текущей скоростью транспортного средства, на основании текущего положения, скорости V1 рассматриваемого транспортного средства, скорости транспортного средства для рассматриваемого транспортного средства V1, текущего положения встречного транспортного средства V2 и скорости транспортного средства для встречного транспортного средства V2. Если определено, что рассматриваемое транспортное средство V1 и встречное транспортное средство V2 не могут разойтись друг с другом, не соприкасаясь друг с другом, процесс переходит к этапу S5. На этапе S4, если определено, что рассматриваемое транспортное средство V1 и встречное транспортное средство V2 могут разойтись друг с другом, процесс возвращается к этапу S1, и автономное движение продолжается.
[0045]
На этапе S4, если определено, что рассматриваемое транспортное средство V1 не может разойтись со встречным транспортным средством V2, если рассматриваемое транспортное средство V1 не замедлится, на этапе S5 блок 23 определения возможности движения получает текущее положение рассматриваемого транспортного средства V1, скорость транспортного средства для рассматриваемого транспортного средства V1, текущее положение встречного транспортного средства V2 и скорость транспортного средства для встречного транспортного средства V2. Затем на этапе S6 блок 23 определения возможности движения прогнозирует маршрут R приближения встречного транспортного средства V2. Поскольку маршрут R приближения встречного транспортного средства V2 формируется блоком 21 прогнозирования маршрута встречного транспортного средства, маршрут R приближения выводится в блок 23 определения возможности движения в дополнение к текущему положению рассматриваемого транспортного средства V1, скорости транспортного средства для рассматриваемого транспортного средства V1, текущего положения встречного транспортного средства V2 и скорости транспортного средства для встречного транспортного средства V2.
[0046]
На этапе S7 блок 23 определения возможности движения устанавливает положение P2 остановки рассматриваемого транспортного средства V1, используя маршрут R приближения встречного транспортного средства V2. Затем, на этапе S8, блок 23 определения возможности движения устанавливает целевой профиль скорости транспортного средства для управления движением с заданным опорным замедлением б. Блок 23 определения возможности движения вычисляет положение P3 расхождения, в котором рассматриваемое транспортное средство V1 и встречное транспортное средство V2 разойдутся друг с другом, используя целевой профиль скорости транспортного средства и скорость транспортного средства для встречного транспортного средства V2.
[0047]
Вычисление положения P3 расхождения поясняется ниже. В ситуации движения, показанной на фиг. 3, положение P2 остановки рассматриваемого транспортного средства V1 устанавливается на основании маршрута R приближения встречного транспортного средства V2. Нижняя часть (значение экстремума) параболы, показанной на фиг. 3, регулируется в положение P2 остановки таким образом, чтобы скорость транспортного средства для рассматриваемого транспортного средства V1 стала равной 0 в положении P2 остановки. Парабола предполагает профиль целевой скорости, в котором замедление б является постоянным. На этапе S9 пересечение прямой линии, представляющей текущую скорость транспортного средства для рассматриваемого транспортного средства V1, и параболы профиля целевой скорости определяется как положение P4 начала замедления рассматриваемого транспортного средства V1. Если рассматриваемое транспортное средство V1 движется, поддерживая текущую скорость транспортного средства, и начинает замедление в соответствии с опорным замедлением б целевого профиля скорости в положении P4 начала замедления, рассматриваемое транспортное средство V1 снижает скорость в соответствии с целевым профилем скорости и останавливается в положении P2 остановки. Положение P3 расхождения, в котором рассматриваемое транспортное средство V1 и встречное транспортное средство V2 разойдутся друг с другом, вычисляется с использованием профиля целевой скорости и скорости транспортного средства для встречного транспортного средства V2 в этот момент времени.
[0048]
После того, как положение P3 расхождения и положение P4 начала замедления вычислены, на этапе S10 определяется, находится ли положение P3 расхождения на ближней стороне (стороне рассматриваемого транспортного средства) или на дальней стороне относительно положения P2 остановки. Если положение P3 расхождения находится на ближней стороне, процесс переходит к этапу S11. Если положение P3 расхождения находится на дальней стороне относительно положения P2 остановки, процесс переходит к этапу S16 на фиг. 2B.
[0049]
Если вычисленное положение P3 расхождения находится на ближней стороне относительно положения P2 остановки, на этапе S11 устанавливается начальное замедление б1 . То есть начальное замедление б1 в положении P4 начала замедления устанавливается на меньшее замедление, чем окончательное замедление б2 непосредственно перед положением P2 остановки. Другими словами, вместо того, чтобы установить постоянное замедление между положением Р4 начала замедления и положением Р2 остановки, устанавливается множество различных значений замедления. Кроме того, множество различных значений замедления устанавливается таким образом, чтобы оно уменьшалось по мере приближения к положению P4 начала замедления (то есть, поскольку время, прошедшее с момента начала замедления, короче). Кроме того, как показано на фиг. 4 и 5, при установке начального замедления б1, чем больше расстояние между положением P2 остановки и положением P3 расхождения (фиг. 4), тем меньшее начальное замедление может быть установлено, по сравнению со случаем, когда расстояние между положением P2 остановки и положением P3 расхождения меньше (рис. 5).
[0050]
Как только установлено начальное замедление б1, на этапе S12 определяется, достигло ли текущее положение P1 рассматриваемого транспортного средства V1 положения P4 начала замедления. Если текущее положение P1 рассматриваемого транспортного средства V1 достигло положения P4 начала замедления, начинается замедление, как описано на этапе S13. Этап S12 повторяется до тех пор, пока текущее положение P1 рассматриваемого транспортного средства V1 не достигнет положения P4 начала замедления. Отметим, что, если определено, что рассматриваемое транспортное средство 1 не достигло положения P4 начала замедления, может выполняться управление движением с ускорением, может не выполняться управление движением с замедлением, может выполняться управление движением с постоянной скоростью, или рассматриваемое транспортное средство может двигаться накатом, за счёт поднятия дроссельной заслонки и отсутствия торможения. В процессе начала замедления на этапе S13 целевая скорость транспортного средства выводится из блока 25 управления отслеживанием скорости транспортного средства в устройство 51 управления движением и устройство 53 управления тормозом. Наряду с устройством 51 управления движением, управляющим двигателем 52, устройство 53 управления тормозом управляет тормозом 54 таким образом, что выполняется процесс.
[0051]
На этапе S14 определяется, может ли рассматриваемое транспортное средство V1 разойтись со встречным транспортным средством V2, не соприкасаясь со встречным транспортным средством V2, на основании текущего положения P1 рассматриваемого транспортного средства V1, скорости транспортного средства для рассматриваемого транспортного средства. V1, текущего положения встречного транспортного средства V2 и скорости транспортного средства для встречного транспортного средства V2. То есть на этапе S13 начинается замедление рассматриваемого транспортного средства V1 с начальным замедлением б1 и обнаруживается ситуация движения встречного транспортного средства V2 и тому подобное после упомянутого замедления. Если определено, что рассматриваемое транспортное средство V1 может разойтись со встречным транспортным средством V2, не соприкасаясь друг с другом, процесс переходит к этапу S15. На этапе S15 замедление прекращается, и процесс возвращается к автономному управлению движением на этапе S1. Фиг.7 представляет собой схему, иллюстрирующую ситуацию, в которой выполняется определение перехода от этапа S14 к этапу S15 в точке определения возможности движения по отношению к рассматриваемому транспортному средству V1, которое начинает замедление из положения P4 начала замедления с начальным замедлением б1. Рассматриваемое транспортное средство V1 возвращается к автономному управлению движением на этапе S1, при этом возврат к установленной скорости достигается повторным ускорением, обозначенным пунктирной линией на фиг.7. В это время рывок между скоростью транспортного средства, сниженной с начальным замедлением б1, и скоростью транспортного средства после упомянутого возврата уменьшается за счёт уменьшения начального замедления б1. То есть при замедлении с замедлением б, указанным в профиле целевой скорости на фиг.7, рывок между скоростью транспортного средства в точке определения возможности движения и скоростью транспортного средства после упомянутого возврата увеличивается в соответствии с разностью скоростей, как показано на чертеже.
[0052]
Если на этапе S14 определено, что рассматриваемое транспортное средство V1 не может разойтись со встречным транспортным средством V2, не соприкасаясь со встречным транспортным средством V2, процесс переходит к этапу S16. На этапах S16 - S18 вычисляется положение переключения (момент времени переключения) с текущего заданного начального замедления б1 на следующее заданное окончательное замедление б2. В то же время определяется, достигло ли рассматриваемое транспортное средство положения переключения. То есть на этапе S16 блок 242 установки окончательного замедления блока 24 формирования целевой скорости транспортного средства устанавливает окончательное замедление б2, с которым рассматриваемое транспортное средство V1 может быть остановлено в положении P2 остановки, на основании начального замедления б1, момента времени переключения от начального замедления б1 и расстояния до положения P2 остановки. Например, в ситуации движения, показанной на фиг. 3, окончательное замедление б2, которое является заданным фиксированным значением, устанавливается таким образом, чтобы рассматриваемое транспортное средство V1 остановилось в положении P2 остановки. Пересечение профиля скорости в соответствии с окончательным замедлением б2 и начальным замедлением б1 определяется как положение переключения (момент времени переключения) с начального замедления б1 на окончательное замедление б2. Затем на этапе S17 определяется, достигло ли рассматриваемое транспортное средство V1 положения переключения (момента времени переключения). На этапе S18, в момент времени, когда определено, что рассматриваемое транспортное средство V1 достигло положения переключения, замедление переключается с начального замедления б1 на окончательное замедление б2.
[0053]
Отметим, что на этапе S10 на фиг. 2A, если положение P3 расхождения, в котором рассматриваемое транспортное средство V1 и встречное транспортное средство V2 разойдутся друг с другом, находится на дальней стороне относительно положения P2 остановки, как показано на фиг. 6, процесс переходит с этапа S10 на этап S18. Вместо установки начального замедления б1, с положения P4 начала замедления начинается управление движением с замедлением с окончательным замедлением б2, как показано на рисунке 6. Это позволяет рассматриваемому транспортному средству V1 избежать соприкосновения со встречным транспортным средством V2.
[0054]
На этапе S18, описанном выше, замедление переключается на замедление с окончательным замедлением б2, и рассматриваемое транспортное средство V1 переключается на управление движением с остановкой в положении P2 остановки. На этапе S19 определяется, может ли рассматриваемое транспортное средство V1 быть остановлено в положении P2 остановки, на основании текущего положения P1 рассматриваемого транспортного средства V1, скорости транспортного средства для рассматриваемого транспортного средства V1 и расстояния до положения P2 остановки. Если определено, что рассматриваемое транспортное средство V1 может быть остановлено в положении P2 остановки, процесс переходит к этапу S21 на фиг. 2C. С другой стороны, если определено, что рассматриваемое транспортное средство V1 не может быть остановлено в положении P2 остановки, процесс переходит к этапу S19. На этапе S19 снова устанавливается окончательное замедление б2, получаемое путем увеличения значения текущего заданного окончательного замедления б2. Затем процесс возвращается к этапу S18 с выполнением управления замедлением с окончательным замедлением б2. Путём регулирования окончательного замедления б2 рассматриваемое транспортное средство V1 может быть гарантированно остановлено в положении P2 остановки.
[0055]
На этапе S21 на фиг. 2C определяется, может ли рассматриваемое транспортное средство V1 разойтись со встречным транспортным средством V2, не соприкасаясь со встречным транспортным средством V2, на основании текущего положения P1 рассматриваемого транспортного средства V1, скорости транспортного средства для рассматриваемого транспортного средства V1, текущего положения встречного транспортного средства V2 и скорости транспортного средства для встречного транспортного средства V2. То есть на этапе S18 замедление рассматриваемого транспортного средства V1 переключается на замедление с окончательным замедлением б2, и обнаруживается последующая ситуация движения встречного транспортного средства V2. Если определено, что рассматриваемое транспортное средство V1 и встречное транспортное средство V2 могут разойтись друг с другом, не соприкасаясь друг с другом, процесс переходит к этапу S22. На этапе S22 замедление прекращается, и процесс возвращается к автономному управлению движением на этапе S1. В результате рассматриваемое транспортное средство V1 повторно ускоряется и возвращается к скорости транспортного средства, установленной автономным управлением движением. Отметим, что на этапе S22 при возврате к автономному управлению движением на этапе S1 путем прекращения замедления создается целевая скорость транспортного средства, которая соответствует меньшему замедлению по сравнению с начальным замедлением, нет необходимости уменьшать замедление на всех участках от положения, в котором управление движением с замедлением остановлено, до положения расхождения.
[0056]
С другой стороны, если на этапе S21 определено, что рассматриваемое транспортное средство V1 не может разойтись со встречным транспортным средством V2, не соприкасаясь со встречным транспортным средством V2, процесс переходит к этапу S23. На этапе S23 замедление с окончательным замедлением б2 продолжается до тех пор, пока рассматриваемое транспортное средство не достигнет положения P2 остановки.
[0057]
Как указано выше, в соответствии с устройством управления движением и способом управления движением по настоящему варианту осуществления, если прогнозируется, что встречное транспортное средство V2 войдет в полосу L1 движения, по которой движется рассматриваемое транспортное средство V1, начальное замедление рассматриваемого транспортного средства V1 в случае, если время до того, как рассматриваемое транспортное средство V1 и встречное транспортное средство V2 разойдутся с друг другом является относительно долгим, устанавливается на меньшее значение, чем начальное замедление в случае относительно короткого упомянутого времени. В качестве примера, рассматриваемое транспортное средство V1 замедляется с замедлением в соответствии с профилем замедления, который обозначен жирной линией на фиг. 3. Это обеспечивает время отсрочки для принятия решения об управлении движением рассматриваемого транспортного средства V1, например следует ли остановить или ускорить рассматриваемое транспортное средство V1. Другими словами, управление движением рассматриваемого транспортного средства V1 может выполняться в ответ на поведение встречного транспортного средства V2 в упомянутое время отсрочки. Следовательно, можно исключить ненужную остановку или ненужное ускорение. В результате можно уменьшить дискомфорт пользователя.
[0058]
В частности, в ситуации движения по настоящему варианту осуществления, в которой рассматриваемое транспортное средство V1 замедляется в соответствии со встречным транспортным средством V2, даже если изначально определено, что замедление необходимо, поскольку имеют место различные изменения в поведении, например, замедление или остановка встречного транспортного средства V2 или ускорение встречного транспортного средства V2 для объезда припаркованного транспортного средства, существует высокая вероятность того, что после этого замедление не потребуется. Другими словами, необходимо уделять особое внимание изменениям в поведении для повторного ускорения, поскольку после замедления в упомянутой ситуации движения высока вероятность выполнения управления повторным ускорением. В этом смысле устройство управления движением и способ управления движением по настоящему варианту осуществления эффективно применяются в ситуации движения, в которой рассматриваемое транспортное средство V1 замедляется в ответ на встречное транспортное средство V2.
[0059]
В соответствии с устройством управления движением и способом управления движением по настоящему варианту осуществления определяется положение P4 начала замедления, в котором начинается замедление рассматриваемого транспортного средства V1, таким образом, чтобы рассматриваемое транспортное средство V1 не соприкасалось со встречным транспортным средством V2, входящим в полосу L1 движения. Затем обнаруживается, достигло ли рассматриваемое транспортное средство V1 положения P4 начала замедления. Если рассматриваемое транспортное средство V1 достигло положения P4 начала замедления, выполняется управление движением с замедлением рассматриваемого транспортного средства V1. В частности, может быть обнаружено, достигло ли рассматриваемое транспортное средство V1 положения P4 начала замедления, и может выполняться управление движением с замедлением после того, как рассматриваемое транспортное средство V1 достигло положения P4 начала замедления, с большим начальным замедлением, чем начальное замедление в случае, если рассматриваемое транспортное средство V1 не достигло положения P4 начала замедления.
[0060]
В качестве альтернативы, на основании ситуации впереди рассматриваемого транспортного средства V1 устанавливается положение P2 остановки для остановки рассматриваемого транспортного средства V1, чтобы рассматриваемое транспортное средство V1 не соприкасалось со встречным транспортным средством V2, входящим в полосу L1 движения, по которой движется рассматриваемое транспортное средство V1. Кроме того, положение P4 начала замедления для начала замедления рассматриваемого транспортного средства V1 определяется на основании установленного положения P2 остановки, текущего положения P1 рассматриваемого транспортного средства V1, текущей скорости транспортного средства для рассматриваемого транспортного средства V1, заданного опорного замедления и начального замедления. Затем обнаруживается, достигло ли рассматриваемое транспортное средство V1 положения P4 начала замедления, и как только рассматриваемое транспортное средство V1 достигло положения P4 начала замедления, выполняется управление движением с замедлением рассматриваемого транспортного средства V1. В этот момент времени может быть установлен профиль целевой скорости транспортного средства для замедления рассматриваемого транспортного средства V1 с заданным опорным замедлением из текущего положения P1, может быть определено положение P3 расхождения, в котором рассматриваемое транспортное средство V1 и встречное транспортное средство V2 разойдутся друг с другом, на основании профиля целевой скорости транспортного средства и скорости транспортного средства для встречного транспортного средства V2, и начальное замедление при выполнении управления замедлением рассматриваемого транспортного средства V1 может быть установлено на основании относительного взаимного расположения между положением P2 остановки и положением P3 расхождения.
[0061]
Кроме того, в соответствии с устройством управления движением и способом управления движением по настоящему варианту осуществления, если положение P3 расхождения, в котором рассматриваемое транспортное средство V1 и встречное транспортное средство V2 разойдутся друг с другом, находится на стороне рассматриваемого транспортного средства (ближней стороне) относительно положения P2 остановки, начальное замедление б1 в случае относительно большого расстояния между положением P2 остановки и положением P3 расхождения устанавливается меньшим, чем заданное опорное замедление б, и меньшим, чем начальное замедление в случае, если расстояние между положением Р2 остановки и положением Р3 расхождения является относительно малым. В результате, чем больше расстояние между положением P2 остановки и положением P3 расхождения, тем больше времени отсрочки может быть обеспечено для определения управления движением рассматриваемого транспортного средства V1. Другими словами, управление движением рассматриваемого транспортного средства V1 может выполняться в ответ на поведение встречного транспортного средства V2 в упомянутое время отсрочки. Таким образом можно дополнительно исключить ненужную остановку или ненужное ускорение. В результате дискомфорт пользователя может быть дополнительно уменьшен.
[0062]
Кроме того, в соответствии с устройством управления движением и способом управления движением по настоящему варианту осуществления, на основании установленного положения P2 остановки, текущего положения P1 рассматриваемого транспортного средства V1, текущей скорости транспортного средства для рассматриваемого транспортного средства V1 и заданного опорного замедления б определяется положение P4 начала замедления впереди рассматриваемого транспортного средства V1. Затем обнаруживается, достигло ли рассматриваемое транспортное средство V1 положения P4 начала замедления. Если рассматриваемое транспортное средство V1 достигло положения P4 начала замедления, выполняется управление движением с замедлением рассматриваемого транспортного средства V1. В результате может быть обеспечено длительное время отсрочки для определения управления движением рассматриваемого транспортного средства V1. В то же время рассматриваемое транспортное средство V1 может быть остановлено в положении P1 остановки в оптимальный момент времени.
[0063]
Кроме того, в соответствии с устройством управления движением и способом управления движением по настоящему варианту осуществления, если управление движением с замедлением рассматриваемого транспортного средства V1 выполняется с установленным начальным замедлением б1, установленное начальное замедление б1 переключается на заданное окончательное замедление б2 в момент времени, в который рассматриваемое транспортное средство V1 может быть остановлено в положении P2 остановки, когда установленное начальное замедление б1 переключается на заданное окончательное замедление б2. Окончательное замедление б2 используется для управления движением с замедлением рассматриваемого транспортного средства V1. В результате может быть обеспечено длительное время отсрочки для определения управления движением рассматриваемого транспортного средства V1. В то же время, рассматриваемое транспортное средство V1 может быть гарантированно остановлено в положении P2 остановки.
[0064]
Кроме того, в соответствии с устройством управления движением и способом управления движением по настоящему варианту осуществления, если определено, что рассматриваемое транспортное средство V1 не может быть остановлено в положении P2 остановки в течение периода для переключения начального замедления б1 на заданное окончательное замедление б2, окончательное замедление переключается на замедление, превышающее заданное окончательное замедление б2. Затем выполняется управление движением с замедлением рассматриваемого транспортного средства V1. В результате может быть обеспечено длительное время отсрочки для определения управления движением рассматриваемого транспортного средства V1. В то же время рассматриваемое транспортное средство V1 может быть гарантированно остановлено в положении P2 остановки даже при изменении ситуации движения.
[0065]
Кроме того, в соответствии с устройством управления движением и способом управления движением по настоящему варианту осуществления, начальное замедление б1 представляет собой заданное значение. Это позволяет установить замедление, не вызывающее дискомфорта у пользователя.
[0066]
Кроме того, в соответствии с устройством управления движением и способом управления движением по настоящему варианту осуществления начальное замедление б1 включает в себя множество значений начального замедления. В результате может быть обеспечено длительное время отсрочки для определения управления движением рассматриваемого транспортного средства V1. В то же время, скорость транспортного средства до и после расхождения может быть установлена таким образом, чтобы рывок стал незначительным.
[0067]
Кроме того, в соответствии с устройством управления движением и способом управления движением по настоящему варианту осуществления начальное замедление б1 включает в себя множество значений начального замедления. Кроме того, начальное замедление, которое окончательно устанавливается с точки зрения времени (то есть начальное замедление непосредственно перед переключением на окончательное замедление б2), устанавливается в наименьшее начальное замедление из множества значений начального замедления. В результате может быть обеспечено длительное время отсрочки для определения управления движением рассматриваемого транспортного средства V1. В то же время, уменьшается рывок при повторном ускорении после расхождения.
[0068]
Кроме того, в соответствии с устройством управления движением и способом управления движением по настоящему варианту осуществления, если положение P3 расхождения находится на стороне встречного транспортного средства (дальней стороне) относительно положения P2 остановки, вместо установки начального замедления б1, заданное опорное замедление б устанавливается равным окончательному замедлению. Кроме того, то, может ли рассматриваемое транспортное средство V1 быть остановлено в положении P2 остановки, определяется на основании установленного окончательного замедления б, текущего положения P1 рассматриваемого транспортного средства V1, текущей скорости транспортного средства для рассматриваемого транспортного средства V1 и положения P2 остановки. В результате, если определено, что рассматриваемое транспортное средство V1 не может быть остановлено в положении P2 остановки, окончательное замедление переключается на замедление больше заданного окончательного замедления б. В результате может быть обеспечено длительное время отсрочки для определения управления движением рассматриваемого транспортного средства V1. В то же время рассматриваемое транспортное средство V1 может быть гарантированно остановлено в положении P2 остановки даже при изменении ситуации движения.
[0069]
Кроме того, в соответствии с устройством управления движением и способом управления движением по настоящему варианту осуществления поведение встречного транспортного средства V2 обнаруживается при выполнении управления движением с замедлением рассматриваемого транспортного средства V1 с замедлением в соответствии с профилем замедления. Затем прогнозируется, может ли рассматриваемое транспортное средство V1 двигаться по полосе L1 движения, не соприкасаясь со встречным транспортным средством V2. Если прогнозируется, что рассматриваемое транспортное средство V1 может двигаться по полосе L1 движения, не соприкасаясь со встречным транспортным средством V2, управление движением с замедлением прекращается, и формируется целевая скорость, при которой не выполняется замедление. В результате может быть обеспечено длительное время отсрочки для определения управления движением рассматриваемого транспортного средства V1. В то же время возможен плавный переход к последующему управлению движением, такому как выполнение управления повторным ускорением.
[0070]
В устройстве управления движением и способе управления движением по настоящему варианту осуществления, как упомянуто выше, значения замедления б, б1 и б2 устанавливаются на соответствующие значения в качестве факторов управления. Однако в качестве факторов управления может использоваться скорость транспортного средства, соответствующая замедлению б, б1 и б2.
[Описание ссылочных позиций]
[0071]
VTC ... Контроллер движения транспортного средства (устройство управления движением транспортного средства)
11 ... Радарное устройство
12 ... Камера
13 ... Картографическая база данных
14 ... Устройство обнаружения положения
15 ... Датчик скорости транспортного средства
21 ... Блок прогнозирования маршрута встречного транспортного средства
22 ... Блок прогнозирования маршрута рассматриваемого транспортного средства
23 ... Блок определения возможности движения
24 ... Блок формирования целевой скорости транспортного средства
25 ... Блок управления отслеживанием скорости транспортного средства
51 ... Устройство управления движением
52 ... Двигатель
53 ... Устройство управления тормозом
54 ... Тормоз
V1 ... Рассматриваемое транспортное средство
V2 ... Встречное транспортное средство
V3 ... Припаркованное транспортное средство
L1 ... Полоса движения
L2 ... Встречная полоса движения
P1 ... Текущее положение рассматриваемого транспортного средства
P2 ... Положение остановки
P3 ... Положение расхождения
P4 ... Положение начала замедления
R ... Маршрут приближения
б ... Опорное замедление
б1 ... Начальное замедление
б2 ... Окончательное замедление
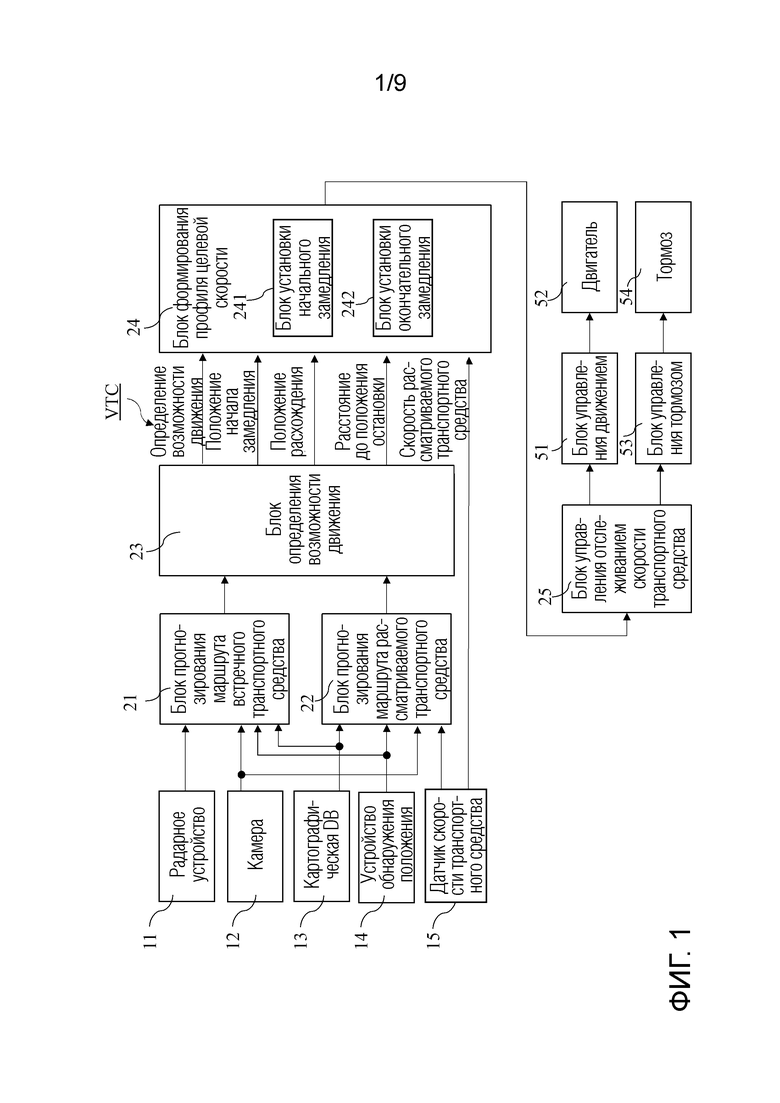
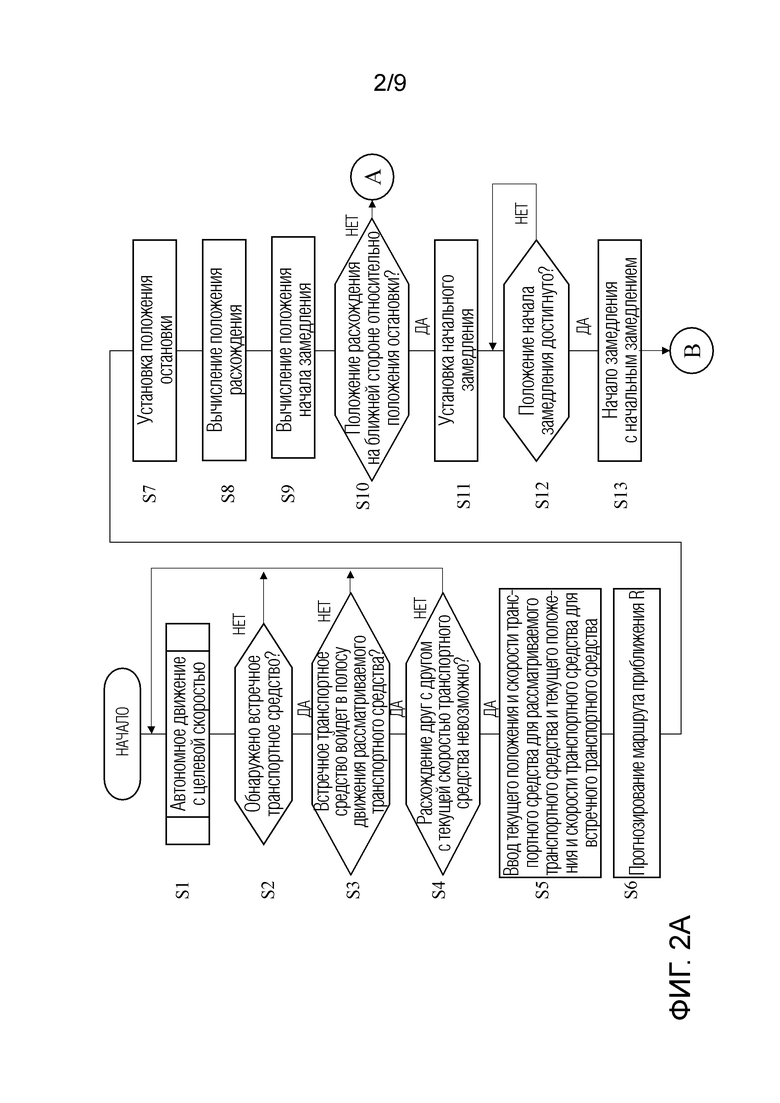
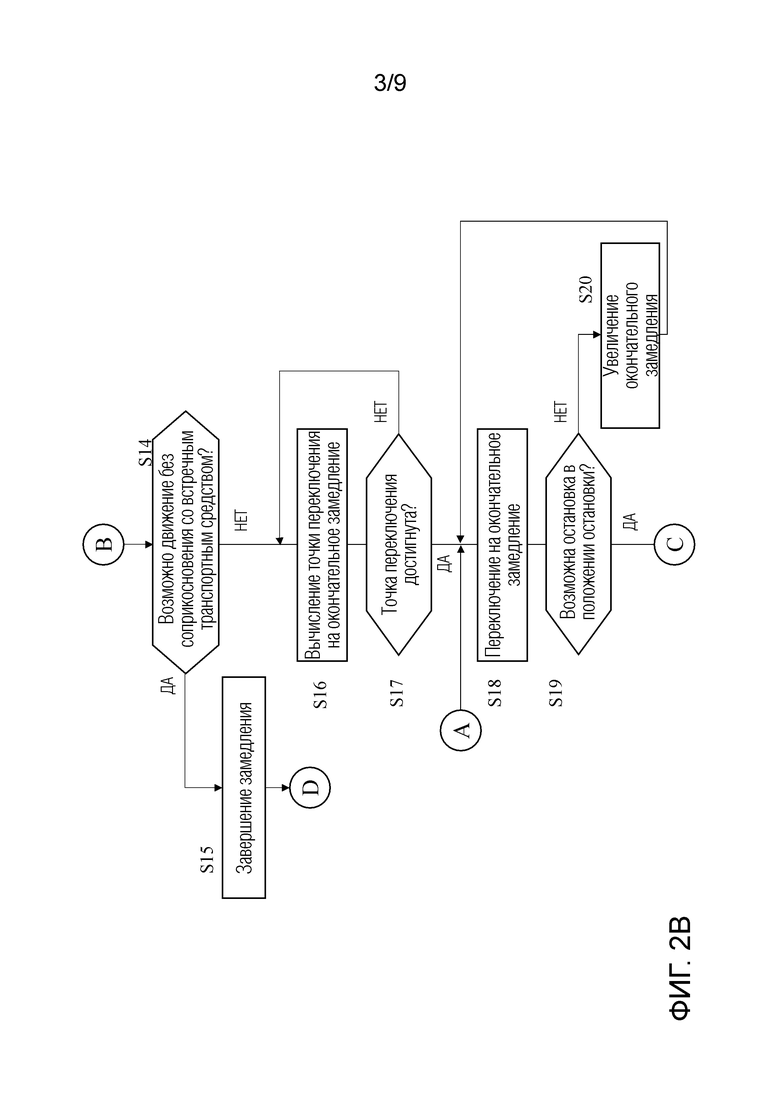
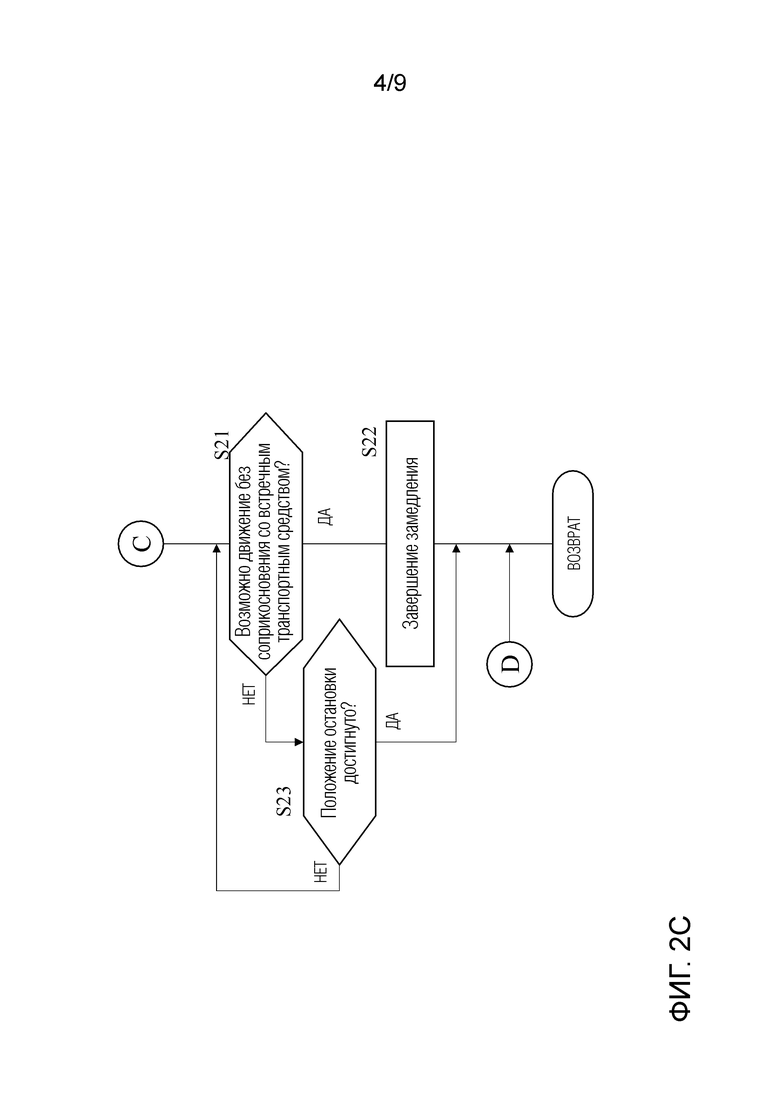
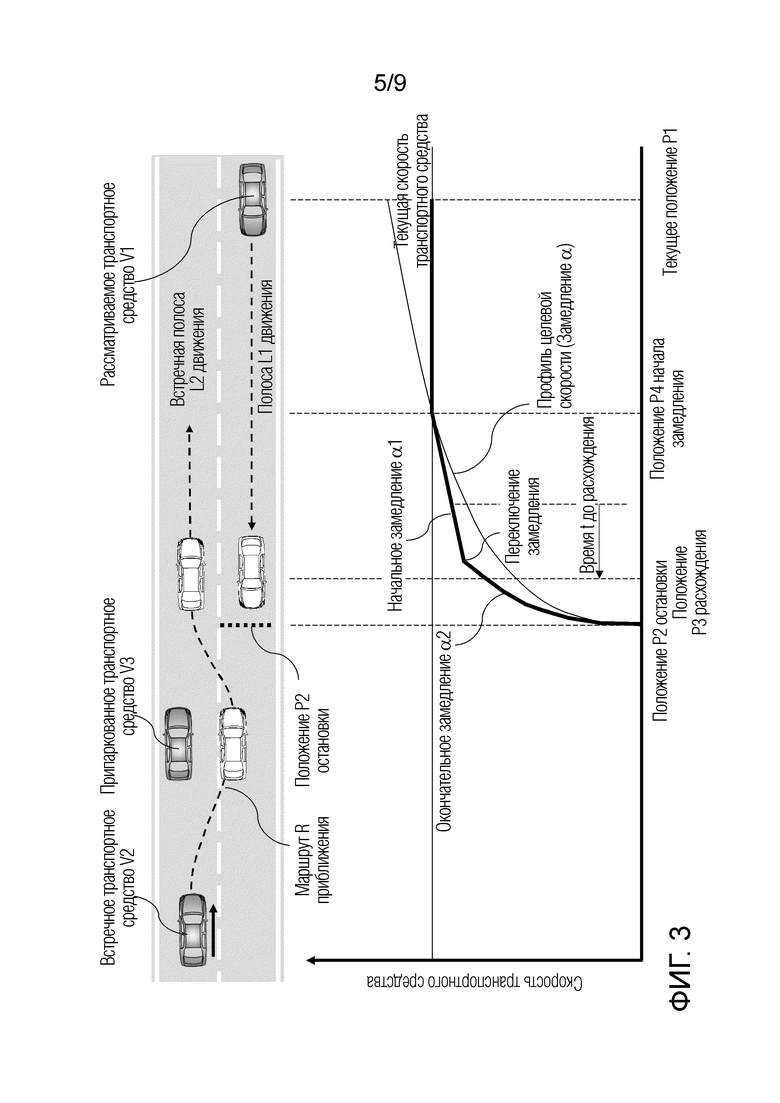
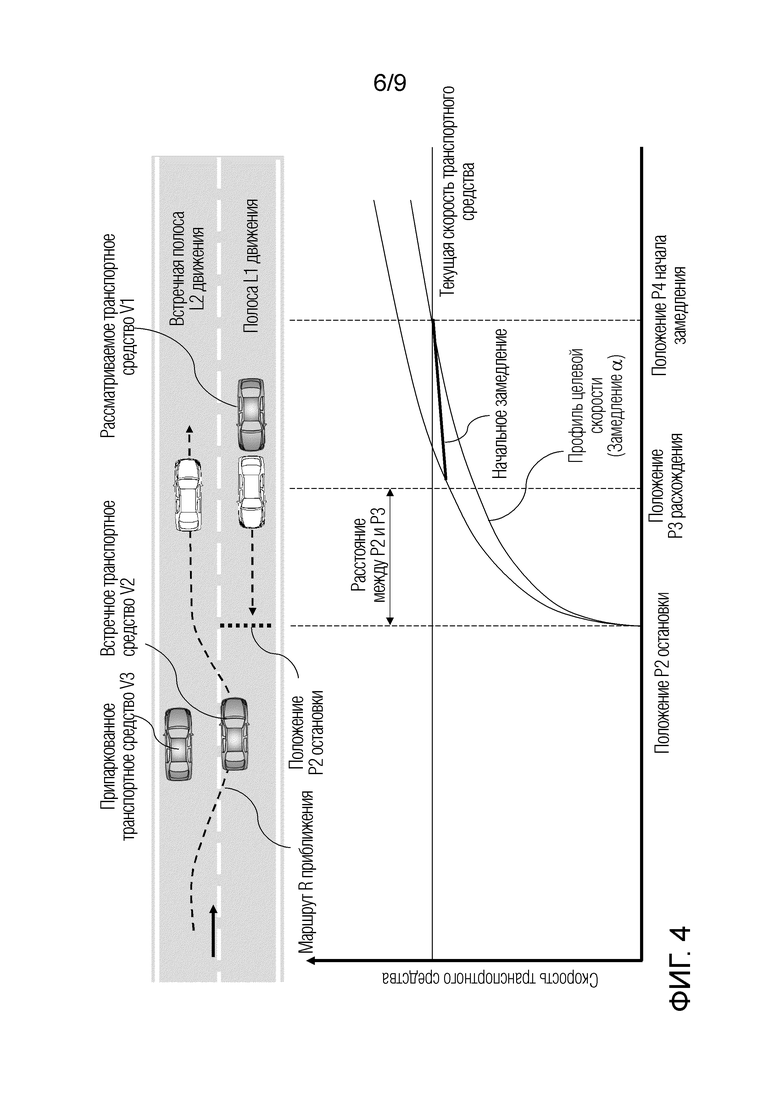
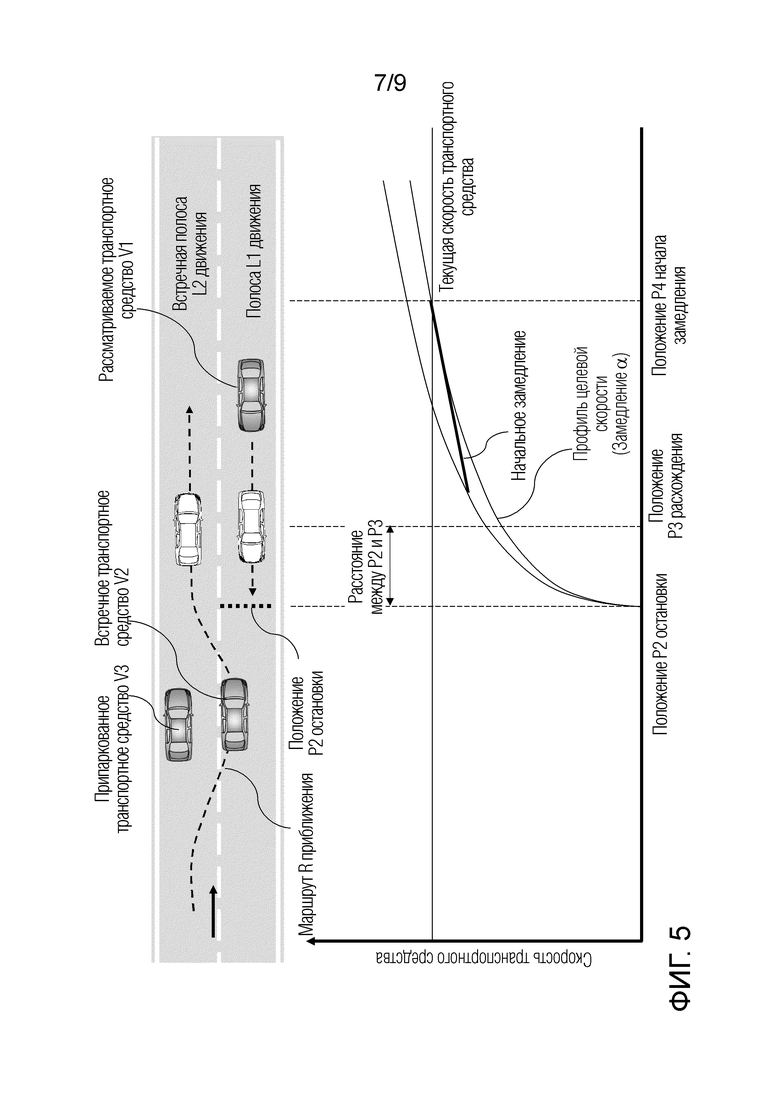
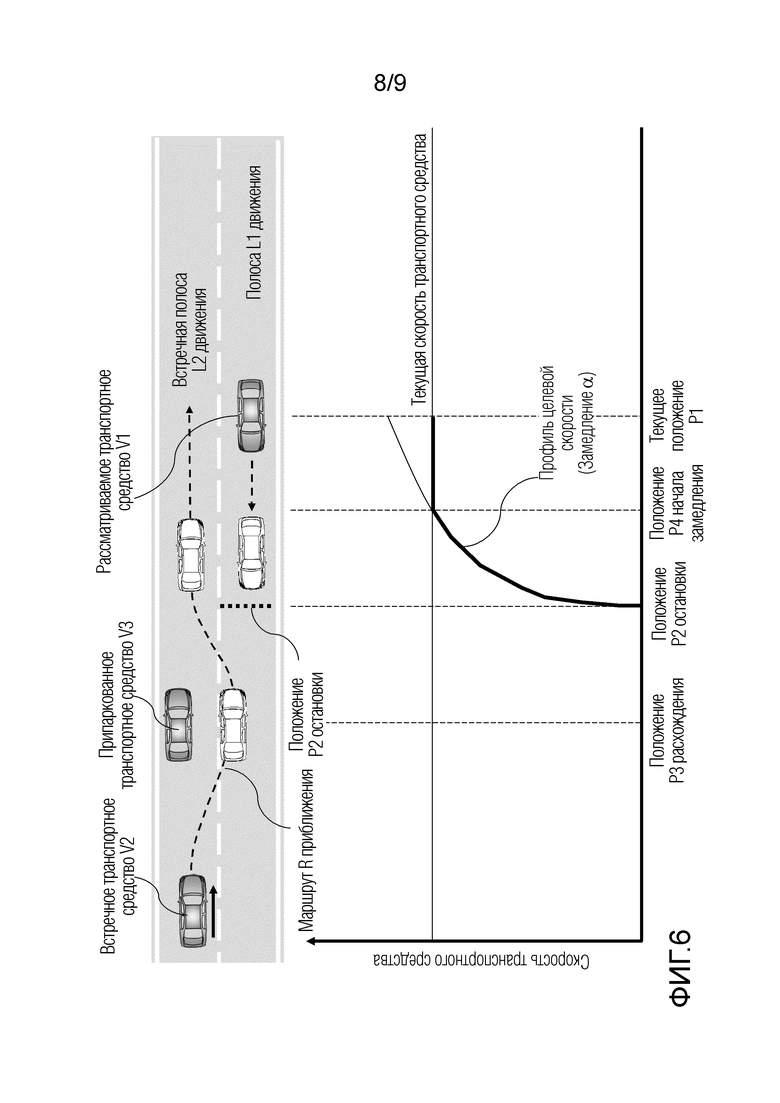
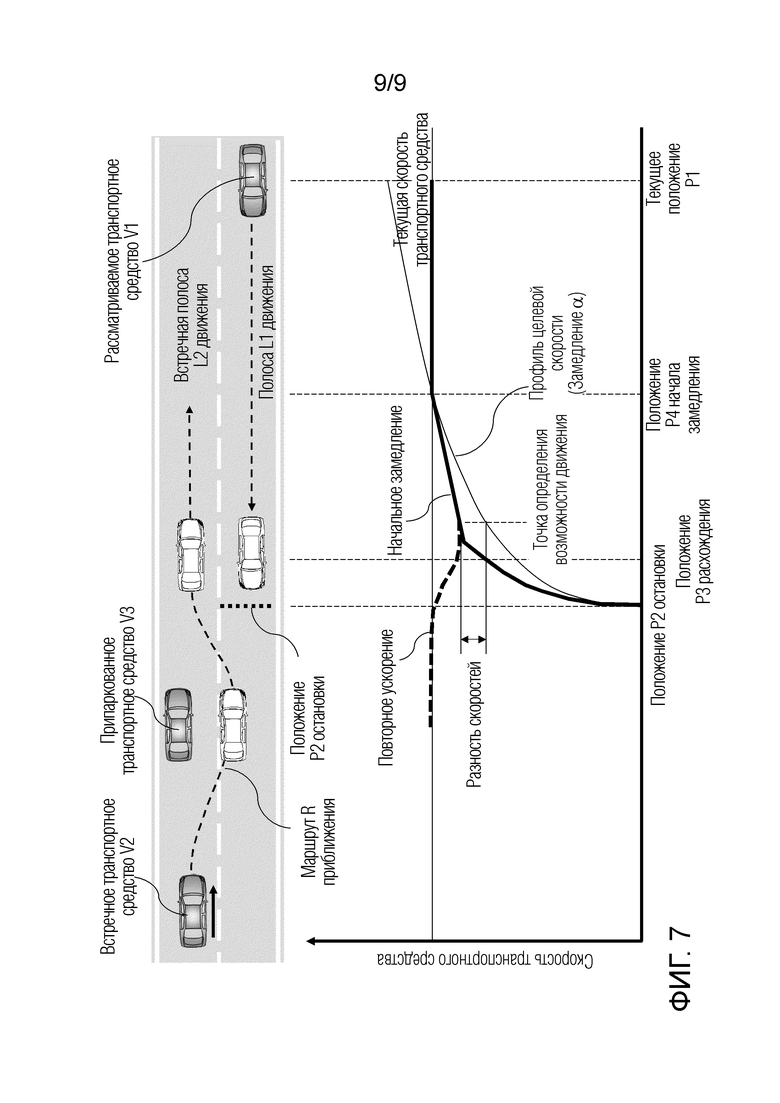
Осуществляют обнаружение встречного транспортного средства (V2), движущегося по противоположной полосе (L2) движения относительно полосы (L1) движения, по которой движется рассматриваемое автономное транспортное средство (V1). Прогнозируют, войдет ли встречное транспортное средство (V2) в полосу (L1) движения, по которой движется рассматриваемое транспортное средство (V1). Если прогнозируется, что встречное транспортное средство (v2) войдет в полосу (L1) движения, по которой движется рассматриваемое транспортное средство (V1), устанавливают начальное замедление рассматриваемого транспортного средства (V1) в случае, если время до того, как рассматриваемое транспортное средство (V1) и встречное транспортное средство (V2) разойдутся друг с другом, является относительно долгим, в меньшее значение, чем начальное замедление в случае, если упомянутое время является относительно коротким, выполняют управление движением с замедлением рассматриваемого транспортного средства (V1). Предложены также способ управления движением для транспортного средства, устройство управления движением для транспортного средства. Достигается уменьшение дискомфорта пользователя рассматриваемого транспортного средства. 3 н. и 15 з.п. ф-лы, 9 ил.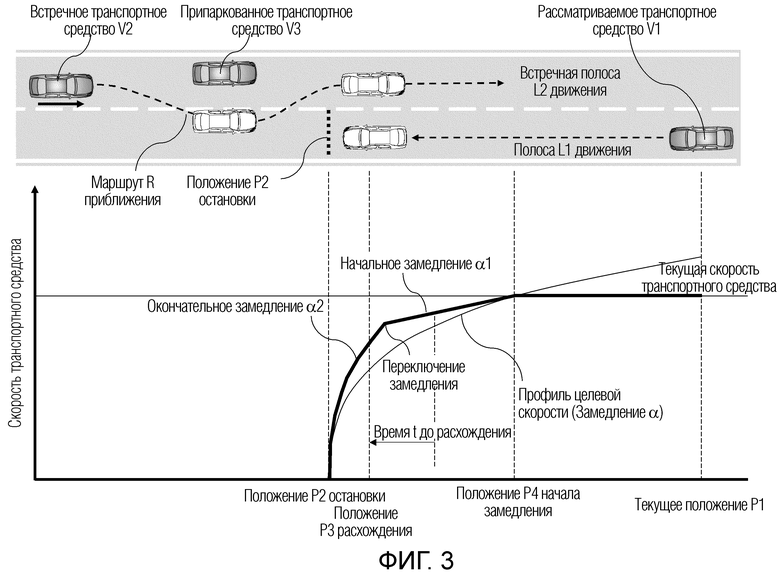
1. Способ управления движением для транспортного средства, имеющего функцию автономного управления движением, содержащий этапы, на которых:
обнаруживают встречное транспортное средство, движущееся в направлении рассматриваемого транспортного средства;
прогнозируют, войдет ли встречное транспортное средство в полосу движения, по которой движется рассматриваемое транспортное средство;
если прогнозируется, что встречное транспортное средство войдет в полосу движения, по которой движется рассматриваемое транспортное средство, устанавливают начальное замедление рассматриваемого транспортного средства в случае, если время до того, как рассматриваемое транспортное средство и встречное транспортное средство разойдутся друг с другом, является относительно долгим, в меньшее значение, чем начальное замедление в случае, если упомянутое время является относительно коротким; и
выполняют управление движением с замедлением рассматриваемого транспортного средства,
причём управление движением с замедлением рассматриваемого транспортного средства выполняется в таком положении начала замедления для начала замедления рассматриваемого транспортного средства, чтобы оно не соприкасалось со встречным транспортным средством, для которого прогнозируется, что оно войдет в упомянутую полосу движения.
2. Способ управления движением для транспортного средства по п. 1, содержащий этапы, на которых:
определяют положение начала замедления для начала замедления рассматриваемого транспортного средства таким образом, чтобы оно не соприкасалось со встречным транспортным средством, для которого прогнозируется, что оно войдет в полосу движения, по которой движется рассматриваемое транспортное средство;
обнаруживают, достигло ли рассматриваемое транспортное средство положения начала замедления; и
выполняют управление движением с замедлением рассматриваемого транспортного средства после того, как рассматриваемое транспортное средство достигло положения начала замедления.
3. Способ управления движением для транспортного средства по п. 2, содержащий этапы, на которых:
обнаруживают, достигло ли рассматриваемое транспортное средство положения начала замедления; и
выполняют управление движением с замедлением после того, как рассматриваемое транспортное средство достигло положения начала замедления, с начальным замедлением, большим, чем начальное замедление в случае, если рассматриваемое транспортное средство не достигло положения начала замедления.
4. Способ управления движением для транспортного средства по п. 2, содержащий этапы, на которых:
устанавливают положение остановки для остановки рассматриваемого транспортного средства таким образом, чтобы оно не соприкасалось со встречным транспортным средством, для которого прогнозируется, что оно войдет в полосу движения, по которой движется рассматриваемое транспортное средство, на основании ситуации впереди рассматриваемого транспортного средства;
определяют положение начала замедления для начала замедления рассматриваемого транспортного средства на основании установленного положения остановки, текущего положения рассматриваемого транспортного средства, текущей скорости транспортного средства для рассматриваемого транспортного средства, заданного опорного замедления и начального замедления;
обнаруживают, достигло ли рассматриваемое транспортное средство положения начала замедления; и
выполняют управление движением с замедлением рассматриваемого транспортного средства после того, как рассматриваемое транспортное средство достигло положения начала замедления.
5. Способ управления движением для транспортного средства по п. 4, содержащий этапы, на которых:
устанавливают профиль целевой скорости транспортного средства для замедления рассматриваемого транспортного средства с заданным опорным замедлением из текущего положения;
определяют положение расхождения, в котором рассматриваемое транспортное средство и встречное транспортное средство разойдутся друг с другом, на основании профиля целевой скорости транспортного средства и скорости транспортного средства для встречного транспортного средства; и
устанавливают начальное замедление при выполнении управления движением с замедлением рассматриваемого транспортного средства на основании относительного взаимного расположения между положением остановки и положением расхождения.
6. Способ управления движением для транспортного средства по п. 4, содержащий этапы, на которых:
устанавливают положение остановки для остановки рассматриваемого транспортного средства таким образом, чтобы оно не соприкасалось со встречным транспортным средством, для которого прогнозируется, что оно войдет в полосу движения, по которой движется рассматриваемое транспортное средство, на основании маршрута приближения встречного транспортного средства;
устанавливают профиль целевой скорости транспортного средства для управления движением рассматриваемого транспортного средства с заданным опорным замедлением, в то время как рассматриваемое транспортное средство движется из текущего положения в положение остановки и останавливается в положении остановки;
определяют положение расхождения, в котором рассматриваемое транспортное средство и встречное транспортное средство разойдутся друг с другом, на основании профиля целевой скорости транспортного средства и скорости транспортного средства для встречного транспортного средства; и
устанавливают начальное замедление при выполнении управления движением с замедлением рассматриваемого транспортного средства на основании относительного взаимного расположения между положением остановки и положением расхождения.
7. Способ управления движением для транспортного средства по п. 5 или 6, содержащий этапы, на которых:
если положение расхождения находится на стороне рассматриваемого транспортного средства относительно положения остановки, устанавливают начальное замедление в случае, когда расстояние между положением остановки и положением расхождения является относительно большим, меньше заданного опорного замедления и начального замедления в случае, когда упомянутое расстояние является относительно малым; и
выполняют управление движением с замедлением рассматриваемого транспортного средства с установленным начальным замедлением.
8. Способ управления движением для транспортного средства по любому из пп. 4 - 7, содержащий этапы, на которых:
переключают установленное начальное замедление на заданное окончательное замедление в момент времени, в который рассматриваемое транспортное средство может быть остановлено в положении остановки, если установленное начальное замедление переключается на заданное конечное замедление, при выполнении управления движением с замедлением рассматриваемого транспортного средства с установленным начальным замедлением; и
выполняют управление движением с замедлением рассматриваемого транспортного средства с заданным окончательным замедлением.
9. Способ управления движением для транспортного средства по любому из пп. 4 - 8, содержащий этапы, на которых:
переключают заданное окончательное замедление на окончательное замедление больше заданного окончательного замедления, если расстояние между установленным положением остановки и рассматриваемым транспортным средством является первым заданным расстоянием; и
выполняют управление движением с замедлением рассматриваемого транспортного средства.
10. Способ управления движением для транспортного средства по любому из пп. 5 - 9, содержащий этапы, на которых:
устанавливают заданное опорное замедление на окончательное замедление вместо установки начального замедления, если положение расхождения находится на стороне встречного транспортного средства относительно положения остановки;
определяют, может ли рассматриваемое транспортное средство быть остановлено в положении остановки, на основании установленного окончательного замедления, текущего положения рассматриваемого транспортного средства, текущей скорости транспортного средства для рассматриваемого транспортного средства и положения остановки;
переключают установленное окончательное замедление на окончательное замедление больше установленного окончательного замедления, если определено, что рассматриваемое транспортное средство не может остановиться в положении остановки; и
выполняют управление движением с замедлением рассматриваемого транспортного средства с установленным окончательным замедлением или с окончательным замедлением больше установленного окончательного замедления.
11. Способ управления движением для транспортного средства по любому из пп. 1-10, в котором начальное замедление представляет собой заданное значение.
12. Способ управления движением для транспортного средства по любому из пп. 1-11, в котором начальное замедление включает в себя множество значений начального замедления.
13. Способ управления движением для транспортного средства по п. 12, в котором окончательно установленное начальное замедление с точки зрения времени представляет собой наименьшее начальное замедление из множества значений начального замедления.
14. Способ управления движением для транспортного средства, имеющего функцию автономного управления движением, содержащий этапы, на которых:
обнаруживают встречное транспортное средство, движущееся в направлении рассматриваемого транспортного средства;
прогнозируют, войдет ли встречное транспортное средство в полосу движения, по которой движется рассматриваемое транспортное средство;
если прогнозируется, что встречное транспортное средство войдет в полосу движения, по которой движется рассматриваемое транспортное средство, устанавливают начальное замедление рассматриваемого транспортного средства в случае, если время до того, как рассматриваемое транспортное средство и встречное транспортное средство разойдутся друг с другом, является относительно долгим, в меньшее значение, чем начальное замедление в случае, если упомянутое время является относительно коротким; и
выполняют управление движением с замедлением рассматриваемого транспортного средства,
причём способ управления движением дополнительно содержит этапы, на которых:
обнаруживают движение встречного транспортного средства при выполнении управления движением с замедлением рассматриваемого транспортного средства с начальным замедлением;
прогнозируют, может ли рассматриваемое транспортное средство двигаться по полосе движения, по которой движется рассматриваемое транспортное средство, не соприкасаясь со встречным транспортным средством; и
устанавливают замедление меньше начального замедления, при выполнении управления движением с замедлением, если прогнозируется, что рассматриваемое транспортное средство может двигаться по полосе движения, по которой движется рассматриваемое транспортное средство, не соприкасаясь со встречным транспортным средством.
15. Способ управления движением для транспортного средства по любому из пп. 1 - 14, содержащий этапы, на которых:
устанавливают положение остановки для остановки рассматриваемого транспортного средства таким образом, чтобы оно не соприкасалось со встречным транспортным средством, для которого прогнозируется, что оно войдет в полосу движения, по которой движется рассматриваемое транспортное средство;
устанавливают профиль целевой скорости транспортного средства для управления движением рассматриваемого транспортного средства с заданным опорным замедлением, в то время как рассматриваемое транспортное средство движется из текущего положения в положение остановки и останавливается в положении остановки;
определяют положение расхождения, в котором рассматриваемое транспортное средство и встречное транспортное средство разойдутся друг с другом, на основании профиля целевой скорости транспортного средства и скорости транспортного средства для встречного транспортного средства;
если положение расхождения находится на стороне рассматриваемого транспортного средства относительно положения остановки, устанавливают начальную скорость в случае, когда расстояние между положением остановки и положением проезда является относительно большим, меньше скорости, соответствующей опорному замедлению в случае, когда упомянутое расстояние является относительно малым; и
выполняют управление движением рассматриваемого транспортного средства таким образом, чтобы достигалась установленная начальная скорость.
16. Способ управления движением для транспортного средства по п. 15, в котором начальная скорость представляет собой скорость, соответствующую наименьшему замедлению в положении расхождения.
17. Способ управления движением для транспортного средства по любому из пп. 1 - 16, содержащий этапы, на которых:
обнаруживают встречное транспортное средство, движущееся по встречной полосе движения относительно полосы движения, по которой движется рассматриваемое транспортное средство;
вычисляют расстояние между рассматриваемым транспортным средством и встречным транспортным средством, если обнаружено встречное транспортное средство;
прогнозируют, войдет ли встречное транспортное средство в полосу движения, по которой движется рассматриваемое транспортное средство, если упомянутое расстояние больше второго заданного расстояния; и
если прогнозируется, что встречное транспортное средство войдет в полосу движения, по которой движется рассматриваемое транспортное средство, выполняют управление движением с замедлением рассматриваемого транспортного средства, причём замедление устанавливается на меньшее значение в случае, когда время до того, как рассматриваемое транспортное средство и встречное транспортное средство разойдутся друг с другом, является относительно долгим, чем замедление в случае, если упомянутое время является относительно коротким.
18. Устройство управления движением для транспортного средства, содержащее контроллер,
причём контроллер выполняет автономное управление движением путём управления по меньшей мере одним из устройства рулевого управления, приводного устройства и тормозного устройства в соответствии с маршрутом движения рассматриваемого транспортного средства, и
при этом контроллер выполнен с возможностью:
обнаружения встречного транспортного средства, движущегося в направлении рассматриваемого транспортного средства;
прогнозирования того, войдёт ли встречное транспортное средство в полосу движения, по которой движется рассматриваемое транспортное средство;
если прогнозируется, что встречное транспортное средство войдет в полосу движения, по которой движется рассматриваемое транспортное средство, установки начального замедления рассматриваемого транспортного средства в случае, если время до того, как рассматриваемое транспортное средство и встречное транспортное средство разойдутся друг с другом, является относительно долгим, в меньшее значение, чем начальное замедление в случае, если упомянутое время является относительно коротким; и
выполнения управления движением с замедлением рассматриваемого транспортного средства,
причём управление движением с замедлением рассматриваемого транспортного средства выполняется в таком положении начала замедления для начала замедления рассматриваемого транспортного средства, чтобы оно не соприкасалось со встречным транспортным средством, для которого прогнозируется, что оно войдет в упомянутую полосу движения.
| DE 102004057060 A1, 08.06.2006 | |||
| Тепловая труба | 1990 |
|
SU1749687A1 |
| US 2002023793 A1, 28.02.2002. | |||

