Изобретение относится к области измерительной техники и может найти применение при проектировании измерителей углового отклонения связанной системы координат (ССК) космического аппарата (КА) от направления на излучающий ориентир, в частности, датчиков для определения координат астроисточников, преимущественно Земли и/или Солнца в ССК КА. В дальнейшем под астроисточником подразумевается Земля и/или Солнце.
Известные устройства [1], [2] представляют собой датчики кругового сканирования горизонта планеты, включающие привод кругового сканирования, последовательно соединенные сканирующий элемент, оптическую систему, приемник излучения, усилитель, демодулятор. Недостатком является необходимость расположения на корпусе КА с обеспечением отсутствия элементов конструкции в конусе сканирования датчика с углом при вершине до 150...160 градусов (угловой размер Земли для высоты полета около 200...300 км).
Известны измерители углового отклонения оси КА [3], [4] секущего типа, содержащие последовательно соединенные привод линейного сканирования, последовательно соединенные сканирующий элемент, оптическую систему, приемник излучения, усилитель, управляемый интегратор и командно-информационный блок, а также задатчик импульсов и концевые датчики. Первый [3] - с двумя параллельными полями, пересекающими всю Землю, второй [4] - дополнительно снабжен блоками для дискриминации (выделение и определение типа источника излучения) помеховых сигналов от Солнца, Луны по длительности импульсов.
Недостатком указанных устройств является невозможность формирования измерительной информации при засветке поля зрения чувствительного элемента (ЧЭ) помеховым излучением Солнца.
Наиболее близким к решаемой задаче (прототипом) является устройство инфракрасного датчика измерения отклонения оси КА от вертикальной плоскости [5].
Устройство [5] для измерения угловых координат астроисточника, преимущественно Земли и/или Солнца, содержит привод сканирования, сканирующий элемент, первый и второй концевые датчики, задатчик счетных импульсов, оптическую систему, первый и второй приемники излучения, первый и второй усилители сигналов, управляемый блок интегрирования импульсов и командно-информационный блок, причем, привод сканирования кинематически связан со сканирующим элементом, с первым и вторым концевыми датчиками и с задатчиком счетных импульсов, выходы первого, второго концевых датчиков и задатчика счетных импульсов подключены соответственно к первому, третьему и второму входам управляемого блока интегрирования, выходы которого подключены к первому и второму входам командно-информационного блока, вход оптической системы оптически связан с выходом сканирующего элемента, а выход - с входами первого и второго приемников излучения, выходы первого и второго приемников излучения связаны соответственно с входами первого и второго усилителей, выходы которых связаны соответственно с четвертым и пятым входами управляемого интегратора.
Недостатком известного устройства является низкая информативность при измерении координат Солнца. Указанный недостаток связан с малой величиной мгновенного поля зрения (МПЗ), следовательно, и шириной поля обзора прибора. Уменьшение информативности при сканировании пространства чувствительным элементом (болометром, пирометром и др.) за счет малой длительности нахождения Солнца в поле обзора прибора в процессе поискового вращения КА, снижает надежность и достоверность измерений. Например, в процессе поиска Солнца минимальная продолжительность измерения его координат имеет место при пересечении Солнцем траектории сканирования под прямым углом. Длительность нахождения Солнца определяется интервалом времени от момента входа Солнца в поле обзора прибора до момента его выхода из поля обзора прибора, с учетом углового размера Солнца ϕS = 0,5 градуса. Причем, для измерения координаты Солнца необходимо, чтобы за один период сканирования Солнце, по крайней мере, дважды попало в МПЗ прибора. При угловой скорости КА при поиске Солнца ωKA = 0,5 градуса/с, угловом размере МПЗ δ = 2 градуса - длительность нахождения Солнца в поле обзора прибора оценивается величиной:
τs = [(δ+ϕS)/ωKA]-T = 4,7 c (1),
где T=0,25...0,3 секунды - период сканирования.
При решении задачи следует учитывать, что увеличение углового размера МПЗ для повышения информативности при измерении координат Солнца вступает в противоречие с требованием уменьшения углового размера МПЗ для повышения точности измерения координат Земли.
Техническим результатом изобретения является повышение информативности устройства при измерении координат Солнца.
Технический результат достигается тем, что в известное устройство [5] для измерения угловых координат астроисточника, преимущественно Земли и/или Солнца, содержащее привод сканирования, сканирующий элемент, первый и второй концевые датчики, задатчик счетных импульсов, оптическую систему, первый и второй приемники излучения, первый и второй усилители сигналов, управляемый блок интегрирования импульсов и командно-информационный блок, причем, мгновенные поля зрения и первого и второго приемников излучения расположены соосны друг другу и угловой размер мгновенного поля зрения второго приемника излучения превышает угловой размер мгновенного поля зрения первого приемника излучения на фиксированную величину зазора, привод сканирования кинематически связан со сканирующим элементом, с первым и вторым концевыми датчиками и с задатчиком счетных импульсов, выходы первого, второго концевых датчиков и задатчика счетных импульсов подключены соответственно к первому, третьему и второму входам управляемого блока интегрирования, выходы которого подключены к первому и второму входам командно-информационного блока, вход оптической системы оптически связан с выходом сканирующего элемента, а выход - с входами первого и второго приемников излучения, выходы первого и второго приемников излучения связаны соответственно с входами первого и второго усилителей, дополнительно введены управляемый блок коммутации и блок запоминания сигнала наличия Солнца, причем, управляемый блок коммутации первым входом связан с выходом первого усилителя, вторым входом - с выходом второго усилителя и первым входом блока запоминания сигнала наличия Солнца и с третьим входом командно-информационного блока, а второй вход блока запоминания сигнала наличия Солнца связан с третьим выходом командно-информационного блока, первый и второй выходы которого связаны с первым и вторым выходами устройства измерения угловых координат.
Причинно-следственная связь между совокупностью существенных вышеуказанных признаков и достигаемым результатом заключается в том, что, благодаря введению новых элементов и связей между блоками, устройство для измерения углового положения КА приобретает новое свойство, а именно, повышается информативность канала измерения координат Солнца за счет увеличения поля обзора солнечного канала прибора. При этом, точность измерения координат Земли не ухудшается, так как обеспечивается сохранение малого размера мгновенного поля обзора приемника инфракрасного излучения в канале измерения координат планеты.
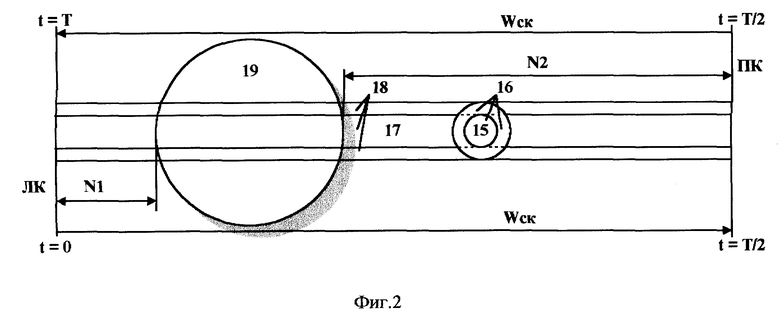
На фиг. 1 представлена структурная схема заявляемого устройства.
На фиг. 2 поясняется формирование поля обзора устройства и принцип измерения координат астроисточника относительно ССК КА.
Предлагаемое устройство (фиг. 1) содержит привод сканирования (ПС) 1, сканирующий элемент (СЭ) 2, первый 3 и второй 4 концевые датчики (КД), задатчик счетных импульсов (ЗСИ) 5, оптическую систему (ОС) 6, первый приемник излучения (ПИ) 7, первый усилитель (У) 8, второй ПИ 9, второй У 10, блок запоминания сигнала наличия Солнца (БЗНС) 11, управляемый блок коммутации сигналов (УБКС) 12, управляемый блок интегрирования импульсов (УБИИ) 13 и командно-информационный блок (КИБ) 14.
ПС 1 кинематически связан со СЭ 2, с первым 3 и вторым 4 КД и с ЗСИ 5. Выходы первого 3, второго 4 КД и ЗСИ 5 подключены соответственно к первому, третьему и второму входам УБИ 13, выходы которого подключены к первому и второму входам КИБ 14. Вход ОС 6 оптически связан с выходом СЭ 2, а выход - с входами первого 7 и второго 9 ПИ. Выходы первого 7 и второго 9 ПИ связаны соответственно с входами первого 8 и второго 10 У. УБКС 12 первым входом связан с выходом первого У 8, вторым входом - с выходом второго У 10 и первым входом БЗНС 11, а третьим управляющим входом - с выходом БЗНС 11 и с третьим входом КИБ 14. Второй обнуляющий вход БЗНС 11 связан с третьим выходом КИБ 14, первый и второй выходы которого связаны с первым и вторым выходами устройства измерения угловых координат. МПЗ 15 и 16 первого 7 и второго 9 ПИ расположены (фиг. 2) соосно друг другу. Причем, угловой размер МПЗ 16 второго ПИ 9 превышает угловой размер МПЗ 15 ПИ 7 на фиксированную величину зазора. В процессе сканирования с угловой скоростью Wск от левого края (ЛК) к правому краю (ПК) траектории и обратно проекции МПЗ 15 и 16 на небесную сферу образуют поля обзора соответственно 17 и 18.
ПС 1 осуществляет гармоническое возвратно-поступательное угловое движение СЭ 2 по синусоидальному закону. На одной оси со СЭ 2 укреплен кодирующий диск фотоэлектрического преобразователя угол-код, который содержит три пары светодиод-фотодиод. Светодиод устанавливается с одной, а фотодиод - с противоположной стороны кодирующего диска. При достижении крайних левого ЛК или правого ПК положений щель на подвижном диске совпадает со щелью на неподвижном нониусе и световой луч от светодиода попадает на фотодиод. Вышеописанное устройство выполняет функции концевых датчиков 3 и 4, которые формируют командный импульс (КИ) о достижении ЛК или ПК.
На подвижном диске нанесена штриховая дорожка, которая модулирует световой поток между светодиодом и фотодиодом. В результате в ЗСИ 5 формируется и с его выхода выдается последовательность счетных импульсов (СИ) с постоянным угловым интервалом, равным угловому расстоянию между соседними штрихами.
КИ, формируемые в блоках 3 и 4 при достижении соответственно ЛК и ПК, СИ от ЗСИ 5, импульсный сигнал ЛГ с выхода первого У 8 о пересечении границы "Космос - Земля" или импульсный сигнал НС с выхода второго У 10 через УБКС 12 поступают в УБИИ 13.
ЧЭ первого 7 и второго ПИ 9 могут представлять собой болометр или пирометр с рабочим диапазоном воспринимаемого инфракрасного (ИК) излучения от 7 до 20 мкм или от 14 до 16 мкм. В другом варианте ЧЭ второго ПИ может представлять собой фотосопротивление, которое вырабатывает сигнал при засветке солнечным излучением в видимом диапазоне излучения и практически не реагирует на ИК излучение планеты. При попадании астроисточника 19 в соответствующее МПЗ на выходах ПИ 7 и/или 9 вырабатываются сигналы, пропорциональные воспринятой ими энергии его излучения.
Усилители 8 и 10 осуществляют преобразование сигналов соответственно от первого и второго ПИ 7 и 9 в импульсные сигналы соответственно "Линия горизонта" (ЛГ) - в момент пересечения границы "Космос - Земля" и "Наличие Солнца" (НС) - в момент пересечения границы "Космос - Солнце" и могут быть выполнены в виде последовательно соединенных двухпозиционного релейного усилителя с зоной нечувствительности / порогового элемента и дифференцирующей схемы формирования переднего и/или заднего фронта входного сигнала. Причем, в случае применения в качестве второго ПИ 9 болометра, воспринимающего излучение как Земли, так и Солнца, порог срабатывания У 8 настроен на сигнал больше максимально возможного помехового сигнала, но меньше минимально возможного от излучения Земли. Порог срабатывания У 10 настроен на минимально возможный сигнал от Солнца и превышает порог У 8.
БЗНС 11 может быть реализован программным модулем или электрической схемой в виде R-S триггера, снабженного запоминающим S обнуляющим R входами. Работа R-S триггера описывается следующей логической функцией, реализуемой в виде программного модуля или/и схемным образом:
где U11 - сигнал на выходе блока 11;
U10 - импульсный сигнал НС на выходе блока 10;
U14 - импульсный сигнал на выходе блока 14;
"+" - знак логического сложения;
"*" - знак логического умножения; - логическая инверсия: если U14 = 1, то
- логическая инверсия: если U14 = 1, то  = 0, если U14 = 0. то
= 0, если U14 = 0. то  = 1;
= 1; - функция запоминания и обнуления сигнала U11.
- функция запоминания и обнуления сигнала U11.
БЗНС 11 работает следующим образом. В момент попадания Солнца в МПЗ 16 на выходе ПИ 9 формируется сигнал, преобразуемый усилителем 10 в импульсный сигнал НС = 1. На входе S триггера формируется импульсный сигнал U10 = 1, который запоминается путем формирования выходного сигнала триггера U11 = 1. Сигнал U11 = 1 сохраняется до тех пор, пока на третьем выходе блока 14 формируется сигнал U14 = 0. Для обнуления выходного сигнала БЗНС 11 необходимо на третьем выходе блока 14 сформировать импульсный сигнал U14 = 1, который подается на третий вход блока 11, связанный с обнуляющим входом R триггера. В результате выходной сигнал триггера обнуляется и сигнал U11 = 0 сохраняется до тех пор, пока U10 = 0.
УБКС 12 может быть реализован программным модулем или электрической схемой в виде управляемого коммутатора, который выполняет коммутацию одного из двух входных сигналов к своему выходу U12 в зависимости от значения управляющего сигнала на его третьем входе по следующему алгоритму:
где U12-1 и U12-2 - сигналы на первом и втором входах блока 12; - логическая инверсия: если U11 = 1, то
- логическая инверсия: если U11 = 1, то  = 0.
= 0.
Если на третий вход УБКС 12 подается сигнал низкого уровня U11 = 0, то к выходу УБКС 12 подключается его первый вход. Если на третий вход УБКС 12 подается сигнал высокого уровня U11 = 1, то к выходу УБКС 12 подключается его второй вход.
УБИИ 13 может быть реализован электрической схемой или программным модулем, описание которого приведено в [5], или следующим образом. УБИИ 13 содержит счетчик, причем СИ, формируемые при движении СЭ 2 от ЛК до левой границы астроисточника 19, поступают на счетный вход УБИИ 13 и суммируются/интегрируются. Результирующая сумма импульсов при сканировании от ЛК до левой границы астроисточника из счетчика записывается и запоминается в первом регистре в составе УБИИ 13 в виде кода N1. При этом предыдущее значение кода N1 в первом регистре обнуляется. Момент записи кода N1 в первый регистр привязан к сигналу ЛГ=1 или НС=1. Возможен вариант привязки и к другим сигналам на интервале движения СЭ 2 от левой границы астроисточника 19 до ПК. При движении сканирующего элемента от левой границы астроисточника 19 до ПК логическая схема/программный модуль УБИИ 13 не пропускает СИ в счетчик. В момент достижения ПК счетчик обнуляется, запрет на счет СИ разблокируется. СИ, формируемые при движении с СЭ 2 от ПК до правой границы астроисточника 19, поступают на счетный вход УБИИ 13 и суммируются. Результирующая сумма импульсов при сканировании от ПК до правой границы линии горизонта астроисточника 19 записывается и запоминается во втором регистре в составе УБИИ 13 в виде кода N2. При этом предыдущее значение кода N2 во втором регистре обнуляется. Момент записи кода N2 во второй регистр привязан к сигналу ЛГ=1 или НС= 1. Возможен вариант привязки и к другим сигналам на интервале движения СЭ 2 от правой границы астроисточника 19 до ЛК. При движении СЭ 2 от правой границы астроисточника 19 до ЛК логическая схема/программный модуль УБИИ 13 СИ в счетчик не пропускает, а в момент достижения ЛК счетчик обнуляется, запрет на счет СИ разблокируется. В момент достижения ЛК логическая схема/программный модуль УБИИ 13 формирует сигнал "Готовность информации", по которой содержимое первого - код N1 и второго - код N2 регистров переписывается в соответствующие регистры КИБ 14, где выполняется расчет углового положения астроисточника 19. Возможны варианты реализации УБИИ 13 как с одним, так и с двумя счетчиками. В последнем варианте в первом счетчике формируется N1, во втором - N2. После формирования взаимосвязанной за цикл сканирования пары кодов N1 и N2 УБИИ 13 формирует сигнал "Готовность информации", по которому коды N1 и N2 пересылаются в соответствующие регистры КИБ 14.
КИБ 14 может быть реализован программным модулем и/или электрической схемой и предназначен для выполнения следующих операций:
управление обменом информации с УБИИ 13;
расчет координат Земли FE или Солнца FS;
формирование импульсного сигнала высокого уровня "1" для обнуления запомненного сигнала НС в БЗНС 11.
КИБ 14 с заданной частотой формирует запрос (например, в виде импульсного сигнала высокого уровня "1") на прием сформированной в УБИИ 13 и в БЗНС 11 информации. По указанному запросу УБИИ 13 после завершения полного периода сканирования T в последовательности ЛК-ПК-ЛК или ПК-ЛК-ПК передает коды N1 и N2, сигнал "Готовность информации", а БЗНС 11 - сигнал U11. Оценив достоверность сформированной информации по наличию сигнала "Готовность информации", КИБ 14 выполняет расчет координат Земли FE или Солнца FS. Координаты Земли FE и Солнца FS характеризуют угловое отклонение плоскости чувствительности устройства от местной вертикали соответственно Земли и Солнца. Причем, плоскость чувствительности заявляемого устройства перпендикулярна плоскости сканирования и расположена на одинаковых угловых расстояниях от ЛК и ПК. В КИБ 14 координаты Земли и Солнца вычисляются по следующим формулам:
FS = U11•K•(N1-N2)/2, (5)
где K - угловое расстояние между двумя соседними СИ; = 1 при U11 = 0 - соответствует режиму измерения координат Земли, при U11 = 1 сигнал о координате Земли FE не формируется и принимает нулевое значение;
= 1 при U11 = 0 - соответствует режиму измерения координат Земли, при U11 = 1 сигнал о координате Земли FE не формируется и принимает нулевое значение;
U11 = 1 - соответствует режиму измерения координат Солнца, при U11 = 0 сигнал о координате Солнца FS не формируется и принимает нулевое значение;
N1 и N2 - коды, соответствующие количеству СИ при сканировании соответственно от ЛК до левой границы линии горизонта Земли или Солнца и от ПК до левой правой линии горизонта Земли или Солнца.
При наличии сигнала U11 = 1 (задан режим измерения координат Солнца) после завершения вычислительных операций по формированию угловой координаты Солнца КИБ 14 формирует на третьем выходе импульсный сигнал высокого уровня "1", по которому выполняется обнуление запомненного сигнала НС в БЗНС 11.
Устройство работает следующим образом. ПС 1 осуществляет гармоническое возвратно-поступательное угловое движение СЭ 2 по синусоидальному закону. При достижении ЛК счетчик УБИИ 13 по сигналу от концевого датчика 3 обнуляется. С выхода ЗСИ 5 СИ поступают на вход счетчика УБИИ 13. Сумма (интеграл) СИ характеризует величину угла поворота СЭ 2. В процессе сканирования от ЛК к ПК МПЗ 15 и 16 пересекают левую границу линии горизонта Земли 19. ИК излучение от Земли через СЭ 2 и ОС 6 попадает на первый ПИ 7. Указанный сигнал преобразуется в У 8 в сигнал ЛГ, который поступает на первый вход УБКС 12. При отсутствии засветки от Солнца сигнал на выходе БЗНС 11 U11 = 0 и УБКС 12 подключает сигнал от У 8 к своему выходу. В момент пересечения левой границы линии горизонта Земли на выходе У 8 формируется импульсный сигнал высокого уровня ЛГ=1, который через УБКС 12 поступает на вход УБИИ 13. В момент формирования ЛГ=1 интегрирование СИ блокируется и код N1 записывается из счетчика в первый регистр. При этом предыдущее значение кода N1 в первом регистре обнуляется.
При движении СЭ 2 от левой границы линии горизонта Земли 19 до ПК логическая схема/программный модуль УБИИ 13 не пропускает СИ в счетчик (т.е., интегрирование СИ прекращается). В момент достижения ПК счетчик УБИИ 13 обнуляется, запрет на интегрирование СИ разблокируется. СИ, формируемые при движении СЭ 2 от ПК до правой границы линии горизонта Земли 19, поступают на счетный вход УБИИ 13 и интегрируются. В момент пересечения правой границы линии горизонта Земли 19 на выходе У 8 формируется импульсный сигнал высокого уровня ЛГ=1, который через УБКС 12 поступает на вход УБИИ 13. В момент формирования ЛГ= 1 интегрирование СИ блокируется и код N2 записывается из счетчика во второй регистр. При этом предыдущее значение кода N2 во втором регистре обнуляется. Далее, при движении СЭ 2 от правой границы линии горизонта Земли 19 до ЛК логическая схема/программный модуль УБИИ 13 не пропускает СИ в счетчик (интегрирование СИ не выполняется), а в момент достижения ЛК счетчик обнуляется, запрет на интегрирование СИ разблокируется. В момент достижения ЛК логическая схема/программный модуль УБИИ 13 формирует сигнал "Готовность информации", по которой содержимое первого - код N1 и второго - код N2 регистров переписывается в соответствующие регистры КИБ 14. Одновременно в КИБ 14 с выхода БЗНС 11 поступает сигнал U11 = 0, который свидетельствует о работе заявляемого устройства в режиме измерения координат Земли. Используя указанные входные сигналы, блок 14 выполняет расчет координат Земли в соответствии с выражением (4).
В момент попадания Солнца в МПЗ 16 устройство работает следующим образом. ПС 1 осуществляет гармоническое возвратно-поступательное угловое движение СЭ 2 по синусоидальному закону. При каждом пересечении линии горизонта Солнца на выходе второго ПИ 9 формируется сигнал, преобразуемый в У 10 в импульсный сигнал высокого уровня НС = 1. В момент первого формирования сигнала НС = 1 в БЗНС 11 на входе S триггера формируется импульсный сигнал U10 = 1, который запоминается путем формирования выходного сигнала триггера U11 = 1. Сигнал U11 = 1 сохраняется до тех пор, пока на третьем выходе КБИ 14 формируется сигнал U14 = 0. Сигнал U11 = 1 поступает на третий вход УБКС 12, по которому выполняется отключение первого входа УБКС 12 и подключение второго входа к выходу УБКС 12. Таким образом, в момент формирования засветки МПЗ 16 Солнцем режим измерения координат Земли блокируется (выход У 8 отключается от счетного входа УБИИ 13, задается режим измерения координат Солнца). На счетный вход УБИИ 13 через УБКС 12 поступает только импульсный сигнал НС с выхода У 10. В процессе сканирования СЭ 2 достигает ЛК, на выходе КД 3 формируется КИ, по которому обнуляется счетчик УБИИ 13. При сканировании от ЛК до левой границы линии горизонта Солнца ПК СИ с выхода ЗСИ 5 поступают на вход счетчика УБИИ 13 и интегрируются. Далее МПЗ 15 и 16 пересекают левую границу линии горизонта Солнца 19. Излучение от Солнца через СЭ 2 и ОС 6 попадает на первый 7 и второй 9 ПИ. Указанные сигналы преобразуются соответственно в У 8 и 10 в импульсные сигналы высокого уровня ЛГ=1 и НС= 1, которые поступают соответственно на первый и на второй входы УБКС 12. Но, как отмечалось выше, к выходу УБКС 12 через его второй вход подключен выход У 10, то есть на вход УБИИ 13 поступает импульсный сигнал НС. В момент пересечения левой границы линии горизонта Солнца на выходе У 10 формируется импульсный сигнал высокого уровня НС=1, который через УБКС 12 поступает на вход УБИИ 13. В момент формирования НС=1 интегрирование СИ блокируется и код N1 записывается из счетчика в первый регистр. При этом предыдущее значение кода N1 в регистре обнуляется.
При движении СЭ 2 от левой границы линии горизонта Солнца 19 до ПК логическая схема/программный модуль УБИИ 13 не пропускает СИ в счетчик (интегрирование СИ не выполняется). В момент достижения ПК счетчик интегратора обнуляется, запрет на интегрирование СИ разблокируется. СИ, формируемые при движении сканирующего элемента от ПК до правой границы Солнца 19, поступают на счетный вход УБИИ 13 и интегрируются. В момент пересечения правой границы линии горизонта Солнца на выходе У 8 формируется импульсный сигнал высокого уровня НС= 1, который через УБКС 12 поступает на вход УБИИ 13. В момент формирования НС=1 интегрирование СИ блокируется и код N2 записывается из счетчика во второй регистр. При этом предыдущее значение кода N2 во втором регистре обнуляется. Далее, при движении сканирующего элемента от правой границы Солнца 19 до ЛК логическая схема/программный модуль УБИИ 13 не пропускает СИ в счетчик (интегрирование СИ не выполняется). В момент достижения ЛК счетчик обнуляется, запрет на счет СИ разблокируется. В момент достижения ЛК логическая схема/программный модуль УБИИ 13 формирует сигнал "Готовность информации", по которой содержимое первого - код N1 и второго - код N2 регистров переписывается в соответствующие регистры КИБ 14. Одновременно в КИБ 14 поступает сигнал с выхода БЗНС 11 U11 = 1, который свидетельствует о задании режима измерения координат Солнца. Используя указанные входные сигналы, КИБ 14 выполняет расчет координат Солнца в соответствии с выражением (5).
После завершения режима измерения координат Солнца по алгоритму, описанному выше, в КИБ 14 на его третьем выходе формируется импульсный сигнал U14 = 1, который подается на третий вход БЗНС 11, связанный с обнуляющим входом R триггера. В результате выходной сигнал триггера обнуляется и сигнал U11 = 0 сохраняется до тех пор, пока Солнце отсутствует в поле обзора 16. То есть, устройство вновь переводится в режим измерения координат Земли до повторной засветки Солнцем. Для определения факта выхода Солнца из поля обзора 16 можно сравнивать между собой значения кодов N1 и N2. При отсутствии Солнца они равны между собой. Следует указать на дополнительную возможность селекции типа источника излучения в КИБ 14, что повышает надежность в случае аварийного отсутствия на входе КИБ 14 сигнала о наличии засветки U11. Для этого можно использовать априорную информацию об угловых размерах Солнца и Земли и суммарном количестве СИ NΣ (NΣ равно N1 или N2 при отсутствии астроисточника в поле обзора устройства), формируемом при сканировании от ЛК до ПК. Например, угловой размер Земли на геостационарной орбите ϕE = 17 градусов, Солнца ϕS = 0,5 градуса. Тогда сравнение вычисленного углового размера астроисточника из выражения
ϕрасчетное = K•(NΣ-N1-N2) (6)
с ϕE и с ϕS позволяет однозначно определить тип астроисточника.
Предлагаемое устройство может работать и в варианте реализации одновременного сканирования по двум параллельным, расположенным друг относительно друга под небольшим углом (порядка 6 градусов) траекториям. В этом случае обработка информации о координатах Земли осуществляется только с одной из траекторий, а при ее засветке Солнцем выполняется переключение обработки информации с другой траектории. В этом случае для измерения координат Солнца в состав устройства может быть введена схема задержки переключения или специальный командный блок, блокирующий такое переключение до достижения надежного измерения координат Солнца. С помощью такого командного блока можно задавать режим измерения координат либо Земли, либо Солнца.
Для исключения формирования ложных сигналов измерения в моменты включения электропитания устройства, появления и пропадания засветки Солнцем возможно введение блокировки изменения (формирования) выходного сигнала на время не менее одного периода сканирования.
Предлагаемое устройство для измерения угловых координат может использоваться в составе СУД КА следующим образом. Угловое положение строительных осей устройства измерения (в частности, его плоскости сканирования) запоминается в виде установочного кватерниона или матрицы направляющих косинусов в бортовом цифровом вычислительном комплексе (БЦВК) СУД. Путем измерения вектора угловой скорости КА и интегрирования кинематических уравнений углового движения на борту КА формируется приборная система координат, характеризующая текущее угловое положение ССК КА относительно его положения на момент начала интегрирования кинематических уравнений. После закрутки КА вокруг оси, образованной пересечением плоскости сканирования с картинной плоскостью устройства (на фиг. 2 - ось закрутки совпадает с вытянутой от ЛК до ПК вдоль центра поля обзора линией) и попадания Солнца в поле обзора, выполняется измерение углового положения Солнца в плоскости сканирования - первая координата. Вторая координата определяется геометрическим положением плоскости сканирования и фиксируется в момент входа и выхода Солнца в поле обзора датчика. Измеренные относительно ССК КА координаты Солнца с учетом углового положения КА на момент измерения запоминаются в БЦВК и далее угловое положение Солнца может быть рассчитано на основе информации о текущем угловом положении КА и запомненных координат Солнца.
Таким образом, предлагаемое устройство для измерения угловых координат астроисточника позволяет дополнительно к основной функции измерения координат Земли или Солнца повысить информативность канала измерения координат Солнца без ухудшения точностных характеристик канала измерения координат Земли. Так например, при угловом размере МПЗ 16 δ = 4 градуса (угловой размер МПЗ 15 первого ПИ 7 остался без изменения δ = 2 градуса) длительность измерения координат Солнца, вычисленная согласно выражению (1) τs = 8,7 с, увеличилась примерно в два раза без ухудшения точностных характеристик устройства в режиме измерения координат Земли.
Источники информации, принятые во внимание
1. Патент США N 3519823 от 1970 г., НКИ 250/203 R, 258-83.3 H, 250/202.
2. Патент США N 3638021 от 1972 г., НКИ 250/203 R, 258-83.3 H, 250/202.
3. Патент США N 3576999 от 4.05.71 г., НКИ 250/203.
4. Патент США N 3920994, НКИ 250/347.
5. Патент РФ N 2020412 по заявке N 93020163 от 20.04.93 г., 5 МПК G 01 C 3/08, G 07 J 1/00, B 64 G 1/38.
Изобретение относится к измерительной технике и может использоваться при проектировании измерителей угловых координат астроисточников в связанной системе координат космического аппарата. Устройство содержит привод сканирования. сканирующий элемент, два концевых датчика, оптическую систему, два приемника излучения, мгновенные поля зрения которых расположены соосно друг с другом, два усилителя, задатчик счетных импульсов, управляемый блок интегрирования, информационно-вычислительный блок, блок коммутации и блок запоминания наличия Солнца. Угловой размер мгновенного поля зрения одного приемника излучения превышает угловой размер мгновенного поля зрения второго приемника излучения на фиксированную величину зазора. Повышена информативность измерений. 2 ил.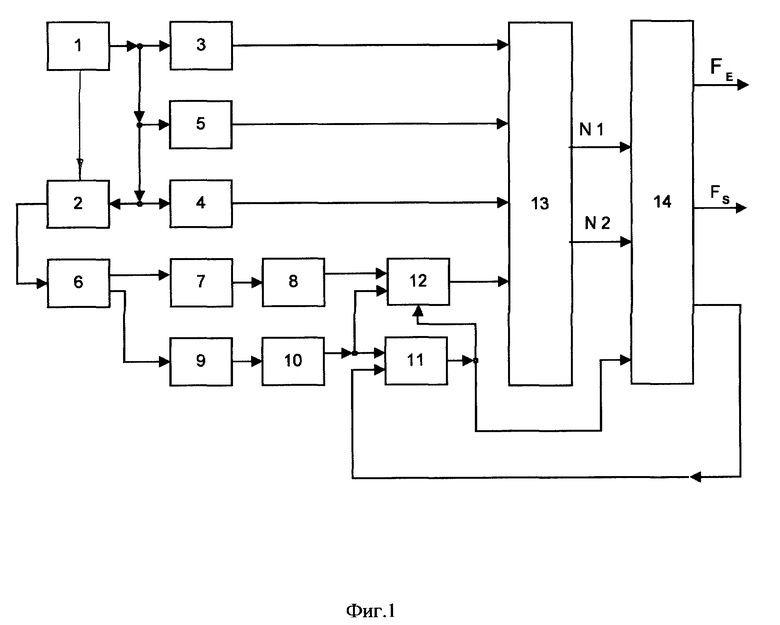
Устройство для измерения угловых координат астроисточника, содержащее привод сканирования, сканирующий элемент, первый и второй концевые датчики, задатчик счетных импульсов, оптическую систему, первый и второй приемники излучения, первый и второй усилители сигналов, управляемый блок интегрирования импульсов и командно-информационный блок, причем мгновенные поля зрения первого и второго приемников излучения расположены соосно друг с другом и угловой размер мгновенного поля зрения второго приемника излучения превышает угловой размер мгновенного поля зрения первого приемника излучения на фиксированную величину зазора, привод сканирования кинематически связан со сканирующим элементом, первым и вторым концевыми датчиками и задатчиком счетных импульсов, выходы первого, второго концевых датчиков и задатчика счетных импульсов подключены соответственно к первому, третьему и второму входам управляемого блока интегрирования, выходы которого подключены к первому и второму входам командно-информационного блока, вход оптической системы оптически связан с выходом сканирующего элемента, а выход - со входами первого и второго приемников излучения, выходы первого и второго приемников излучения связаны соответственно со входами первого и второго усилителей, отличающееся тем, что в него введены управляемый блок коммутации и блок запоминания сигнала наличия Солнца, причем управляемый блок коммутации первым входом связан с выходом первого усилителя, вторым входом - с выходом второго усилителя и первым входом блока запоминания сигнала наличия Солнца, а третьим управляющим входом - с выходом блока запоминания сигнала наличия Солнца и третьим входом командно-информационного блока, а второй вход блока запоминания сигнала наличия Солнца связан с третьим выходом командно-информационного блока, первый и второй выходы которого являются первым и вторым выходами устройства измерения угловых координат.
| ИЗМЕРИТЕЛЬ УГЛА ОТКЛОНЕНИЯ ОСИ КОСМИЧЕСКОГО АППАРАТА ОТ ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 1993 |
|
RU2020412C1 |
| СПОСОБ ОЧИСТКИ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБ | 1995 |
|
RU2072211C1 |
| US 3638621 A, 25.01.72. | |||

