Изобретение относится к космической технике и может быть использовано при проектировании систем управления движением (СУД) космических аппаратов (КА). В частности изобретение решает задачу трехосной ориентации КА относительно Земли с датчиком построителем местной вертикали (ПМВ) с узким полем обзора на стационарной орбите с высотой полета ≈36000 км (угловой размер Земли ≈17о, поле обзора инфракрасного датчика ПМВ ≈20о).
Наиболее близким к предлагаемому (прототип) является способ ориентации космического аппарата на планету, включающий ориентацию аппарата относительно направления на Солнце, определение углов между направлением на Солнце и осями орбитальной системы координат, поворот аппарата вокруг направления на Солнце до совпадения оси визирования датчика местной вертикали с местной вертикалью планеты.
Технической задачей изобретения является сокращение времени ориентации.
Данная техническая задача решается тем, что в способе, включающем ориентацию аппарата относительно направления на Солнце, определение углов между направлением на Солнце и осями орбитальной системы координат, поворот аппарата вокруг направления на Солнце до совпадения оси визирования датчика местной вертикали с местной вертикалью планеты, перед поворотом вокруг направления на Солнце фиксируют ось аппарата, проекции единичного вектора направления которой на оси, связанной с аппаратом системы координат, равны проекциям единичного вектора направления на Солнце на оси орбитальной системы координат, и поворачивают аппарат в плоскости фиксированная ось - направление на Солнце до совмещения этой оси аппарата с направлением на Солнце.
При этом сокращение времени ориентации достигается за счет минимизации времени ориентации КА на Солнце путем выполнения плоского поворота (т.е. по наикратчайшему пути) и исключения времени ожидания достижения углом СОЗ величины 90о.
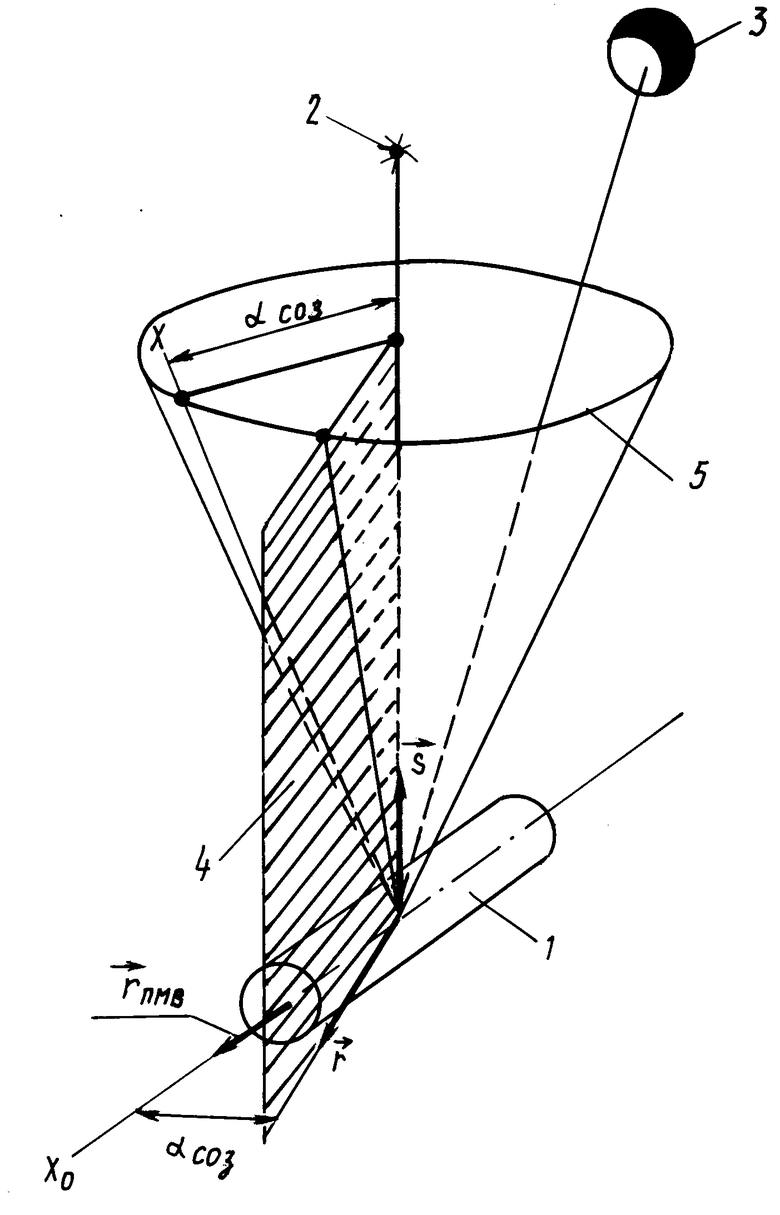
На чертеже, поясняющем способ, введены следующие обозначения: 1 - КА (объект); 2 - Солнце; 3 - Земля; 4 - плоскость разворота КА при ориентации на Солнце; 5 - коническая поверхность, образуемая следом оси визирования ПИВ Х при повороте вокруг направления  на Солнце;
на Солнце;  - связанный с КА базис с ортогональными осями Вх, Вy, Bz,
- связанный с КА базис с ортогональными осями Вх, Вy, Bz, - единичный вектор, направленный по ОВ ПМВ;
- единичный вектор, направленный по ОВ ПМВ; = (1,0,0)Т - единичный вектор
= (1,0,0)Т - единичный вектор  в проекциях, на связанный с КА базис
в проекциях, на связанный с КА базис  ;
; - единичный вектор направления на Солнце;
- единичный вектор направления на Солнце; = (S
= (S , S
, S , S
, S )T - единичный вектор направления на Солнце в проекциях на орбитальный базис
)T - единичный вектор направления на Солнце в проекциях на орбитальный базис  ;
;
Xo - начальное положение ОВ ПМВ;
Х - положение ОВ ПМВ после завершения ориентации на Солнце; =
=  (r
(r , r
, r , r
, r )T - единичный вектор зафиксированой оси в связанном с КА базисе В,причем rBx=SQx,rBy=SQy,rBz=SQz (верхний индекс "Т" указывает на операцию транспонирования, нижний индекс "y" вектора - на базис в проекциях, на который задается этот вектор).
)T - единичный вектор зафиксированой оси в связанном с КА базисе В,причем rBx=SQx,rBy=SQy,rBz=SQz (верхний индекс "Т" указывает на операцию транспонирования, нижний индекс "y" вектора - на базис в проекциях, на который задается этот вектор).
П р и м е р. Ориентация КА на стационарной орбите.
Операции управления ориентацией осуществляются системой управления движением и навигации (СУДН) КА, построенной на базе бескарданной инерциальной навигационной системы (БИНС).
После включения СУДН в память бортовой цифровой вычислительной машины (БЦВМ) вводят элементы орбиты КА. Используя известные соотношения и алгоритмы, БИНС, интегрируя уравнения движения центра масс КА, вычисляет матрицу (или кватернион) λ перехода от инерциальной системы координат  (ось Iγx - направлена в точку весеннего равноденствия, ось Iγz - на северный полюс, Iγy - дополняет систему координат до правой) к орбитальному базису Q (ось Qх направлена на центр планеты по МВ, Qz - перпендикулярно плоскости орбиты, Qy - по направлению полета).
(ось Iγx - направлена в точку весеннего равноденствия, ось Iγz - на северный полюс, Iγy - дополняет систему координат до правой) к орбитальному базису Q (ось Qх направлена на центр планеты по МВ, Qz - перпендикулярно плоскости орбиты, Qy - по направлению полета).
Таким образом, используя расчетную матрицу λ , в БИНС(БЦВМ) вычисляются величины проекций единичного вектора направления на Солнце на оси орбитального базиса = λ ·
= λ ·  = (λ11, λ21, λ31)T , (1)
= (λ11, λ21, λ31)T , (1)
где  = (1,0,0)T
= (1,0,0)T
После раскрутки гиромоторов блока датчиков угловых скоростей в БИНС, интегрируя кинематические уравнения, вычисляется матрица Н перехода от текущего положения КА к инерциальному базису  , совпадающему на момент начала интегрирования кинематических уравнению со связанным с КА базисом
, совпадающему на момент начала интегрирования кинематических уравнению со связанным с КА базисом  . По команде от блока, реализующего выполнение циклограммы управления, в момент времени ts блок датчиков измерения направления на Солнце (например, со сферическим полем обзора) выполняет измерение проекций единичного вектора направления на Солнце
. По команде от блока, реализующего выполнение циклограммы управления, в момент времени ts блок датчиков измерения направления на Солнце (например, со сферическим полем обзора) выполняет измерение проекций единичного вектора направления на Солнце  в связанном базисе. На этот же момент времени фиксируется матрица текущего углового положения КА Н (ts), вычисляются и запоминаются проекции вектора направления на Солнце на базис
в связанном базисе. На этот же момент времени фиксируется матрица текущего углового положения КА Н (ts), вычисляются и запоминаются проекции вектора направления на Солнце на базис  :
: (tS) = H(tS)
(tS) = H(tS) (tS)
(tS)
Далее в БИНС непрерывно вычисляются текущие координаты вектора  Cолнце
Cолнце =
=  (t) = Hт(t)
(t) = Hт(t) (ts) , (2) при этом датчики Солнца могут быть выключены. Определяются координаты вектора, фиксирующие ось КА, проекции которого на базис
(ts) , (2) при этом датчики Солнца могут быть выключены. Определяются координаты вектора, фиксирующие ось КА, проекции которого на базис  равны проекциям вектора Солнце на орбитальный базис
равны проекциям вектора Солнце на орбитальный базис = (r
= (r , r
, r , r
, r )T , где
)T , где
r = S
= S
r = S
= S
r = S
= S Затем вычисляются координаты единичного вектора
Затем вычисляются координаты единичного вектора  , направление которого определяет вектор угловой скорости КА с обратным знаком для поворота с целью совмещения упомянутой фиксированной оси
, направление которого определяет вектор угловой скорости КА с обратным знаком для поворота с целью совмещения упомянутой фиксированной оси  с направлением на Солнце
с направлением на Солнце  по наикратчайшему пути
по наикратчайшему пути = - [
= - [ ·
·  ]/
]/ [
[
 ]
] и угол между фиксированной осью и направлением на Солнце
и угол между фиксированной осью и направлением на Солнце
Δα = arccos (
 ) Вычисляется кватернион рассогласования
) Вычисляется кватернион рассогласования
M =  cos
cos  ,
,  sin
sin ,
,  sin
sin ,
,  sin
sin .
.
После формирования кватерниона М кинематический и динамический контур управления, реализованные по известным законам, осуществляют операции по управлению поворотом КА, в результате которых величина рассогласования Δα сводится к нулю (с точностью до погрешностей ориентации), т.е.  поворачивается в плоскости 4 до совмещения с
поворачивается в плоскости 4 до совмещения с  . При достижении и поддержании Δα < Δαдопуст в течение заданного времени, например, с помощью устройства времени формируется признак -готовность к развороту вокруг направления на Солнце. Далее по известным соотношениям формируются скорости коррекции, вызывающие поворот КА вокруг направления на Солнце при одновременном устранении рассогласования Δα . При этом ОВ ПВМ (
. При достижении и поддержании Δα < Δαдопуст в течение заданного времени, например, с помощью устройства времени формируется признак -готовность к развороту вокруг направления на Солнце. Далее по известным соотношениям формируются скорости коррекции, вызывающие поворот КА вокруг направления на Солнце при одновременном устранении рассогласования Δα . При этом ОВ ПВМ ( совпадает с Х) и движется по поверхности конуса 5. После совмещения оси визирования ПВМ с МВ планеты 3, определяемом по сигналам датчика ПМВ, поворот завершается и управление передается контуру поддержания орбитальной ориентации.
совпадает с Х) и движется по поверхности конуса 5. После совмещения оси визирования ПВМ с МВ планеты 3, определяемом по сигналам датчика ПМВ, поворот завершается и управление передается контуру поддержания орбитальной ориентации.
Таким образом, благодаря выполнению минимально возможных разворотов КА и устранению времени ожидания расчетного угла СОЗ (в прототипе 90о) достигается сокращение времени и обеспечивается построение трехосной орбитальной ориентации.
Область применения: в космической технике и может быть использовано при проектировании систем управления движением космических аппаратов. Сущность изобретения: для сокращения времени построения ориентации оси визирования (ОВ) узкопольного измерителя углового отклонения космического аппарата (КА) от направления на источник излучения, в частности инфракрасного построителя местной вертикали (ПМВ) на центр - местную вертикаль (МВ) Земли, а также для оебспечения трехосной ориентации КА к моменту совмещения ОВ с МВ, фиксируют ось КА, проекция направляющего единичного вектора которой на оси связанного с КА базиса равна соответствующим проекциям единичного вектора направления на Солнце на оси орбитального базиса. Фиксируют плоскость, образованную направлениями на Солнце и зафиксированной оси, поворачивают КА по наикратчайшему пути вокруг оси, перпендикулярной зафиксированной плоскости, до совмещения упомянутой оси КА с направлением на Солнце. Затем поворачивают КА вокруг направления на Солнце до совмещения ОВ с МВ одновременно с компенсацией отклонения оси поворота КА от направления на Солнце и положения самой оси поворота КА в процессе изменения величин проекций единичного вектора направления на Солнце на оси орбитального базиса в течение времени выполнения ориентации КА. 1 ил.
СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА НА ПЛАНЕТУ, включающий ориентацию аппарата относительно направления на Солнце, определение углов между направлением на Солнце и осями орбитальной системы координат, поворот аппарата вокруг направления на Солнце до совпадения оси визирования датчика местной вертикали с местной вертикалью планеты, отличающийся тем, что перед поворотом вокруг направления на Солнце фиксируют ось аппарата, проекции единичного вектора направления которой на оси, связанной с аппаратом системы координат, равны проекциям единичного вектора направления на Солнце на оси орбитальной системы координат, и поворачивают аппарат в плоскости фиксирования ось - направление на Солнце до совмещения указанной фиксированной оси аппарата с направлением на Солнце.
| Мирошниченко Л.А | |||
| и др | |||
| Система ориентации и стабилизации спутника телевизионного вещания Экран, Изв.св | |||
| Н | |||
| СССР, Техническая кибернетика, М.: Наука, 1977, N 4. |

