Изобретение относится к космической технике и может быть использовано при проектировании систем управления движением (СУД) космических аппаратов (КА). В частности изобретение решает задачу одновекторной ориентации КА относительно Земли с датчиком - построителем местной вертикали (ПМВ) с узким полем обзора на стационарной орбите с высотой полета около 36000 км (угловой размер Земли ≈ 17о, поле обзора инфракрасного датчика ПВМ ≈20о).
Наиболее близким техническим решением является способ, включающий ориентацию КА на Солнце. (Ориентируют на Солнце ось, перпендикулярную (ОВ) ПМВ, определяют текущий угол "Солнце-объект (КА) - Земля" (СОЗ), сравнивают его с углом "Солнце-объект-ОВ ДМВ", поворачивают КА вокруг направления на Солнце после достижения разностью сравниваемых углов заданного значения до совмещения ОВ с МВ Земли.
Недостатком этого способа является то, что на стационарной орбите угол СОЗ 90о достигается через каждые 12 ч, что чрезмерно затягивает время построения ориентации.
Технической задачей является сокращение времени ориентации.
Это достигается тем, что в способе ориентации космического аппарата (объекта) по местной вертикали планеты, включающем ориентацию аппарата относительно направления на Солнце, определение угла "Солнце-объект-Земля", сравнение его с углом "Солнце-объект-ось визирования датчика местной вертикали" и поворот аппарата вокруг направления на Солнце после достижения разностью сравниваемых углов значения, близкого к нулю до совмещения оси визирования датчика с местной вертикалью, ориентацию аппарата относительно направления на Солнце выполняют путем поворота оси визирования датчика в плоскости "ось визирования-направление на Солнце" до достижения угла между осью визирования и направлением на Солнце расчетной величины угла "Солнце-объект-Земля". При этом сокращение времени ориентации достигается за счет минимизации времени ориентации КА на Солнце путем выполнения плоского поворота (т.е. по наикратчайшему пути) и исключения времени ожидания достижения углом СОЗ величины 90о.
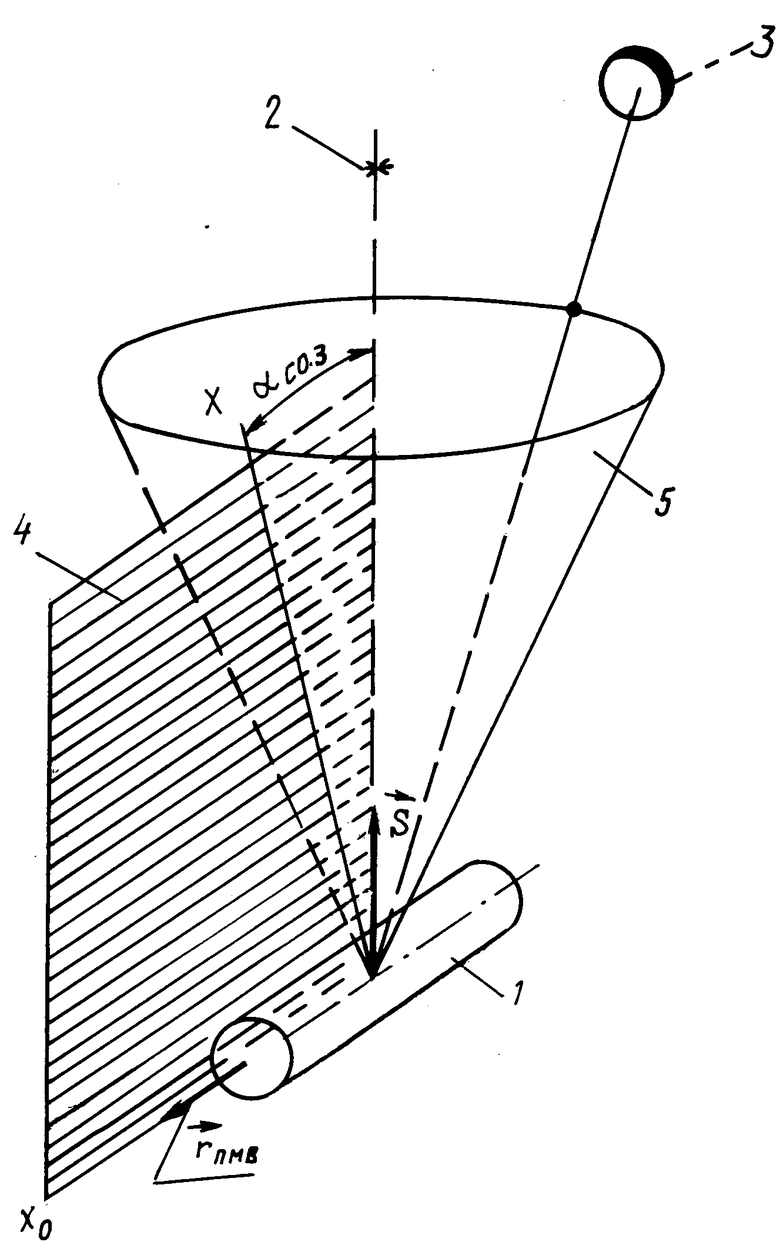
Для пояснения способа приводится чертеж, где внесены следующие обозначения: 1 - КА (объект); 2 - Солнце; 3 - Земля; 4 - плоскость разворота КА при ориентации на Солнце; 5 - коническая поверхность, образуемая следом оси визирования ПМВ  при повороте вокруг направления
при повороте вокруг направления  на Солнце;
на Солнце;  = (1,0,0)T - единичный вектор, направленный по ОВ ПМВ;
= (1,0,0)T - единичный вектор, направленный по ОВ ПМВ;  - единичный вектор направления на Солнце; хо - начальное положение ОВ ПМВ; х - положение ОВ ПМВ после завершения ориентации на Солнце;
- единичный вектор направления на Солнце; хо - начальное положение ОВ ПМВ; х - положение ОВ ПМВ после завершения ориентации на Солнце;  - базис связанной с КА правой системой координат, с единичными ортами
- базис связанной с КА правой системой координат, с единичными ортами  ,
,  ,
,  ; Q - орбитальный базис с единичными ортами Qx, Qy, Qz.
; Q - орбитальный базис с единичными ортами Qx, Qy, Qz.
Запись векторов в виде  ,
,  указывает на задание векторов
указывает на задание векторов  ,
,  тремя проекциями по оси базисов
тремя проекциями по оси базисов  ,
, 
 =
=  = (
= ( ,
,  ,
,  )Т
)Т =
=  = (S
= (S , S
, S , S
, S )T , где индекс "Т" - указывает операцию транспортирования.
)T , где индекс "Т" - указывает операцию транспортирования.
Описание изобретения приведено на примере ориентации КА на стационарной орбите.
Операции управления ориентацией осуществляются системой управления движением и навигации (СУДН) КА, построенной на базе бескарданной инерциальной навигационной системы (БИНС).
В момент включения СУДН в память бортовой цифровой вычислительной машины (БЦВМ) вводят элементы орбиты КА. Используя известные соотношения и алгоритмы БИНС, интегрируя уравнения движения центра масс КА, вычисляют матрицу (или кватернион) λ перехода от инерциальной системы координат Iγ (ось lγ x направлена в точку весеннего равноденствия, ось I γz - на северный полюс, ось I γ y дополняет систему координат до правой) к орбитальному базису  (ось Qx направлена на центр планеты по МВ, ось Qz - перпендикулярно плоскости орбиты, ось Qy - по направлению полета).
(ось Qx направлена на центр планеты по МВ, ось Qz - перпендикулярно плоскости орбиты, ось Qy - по направлению полета).
Таким образом, используя расчетную матрицу в БИНС, вычисляются величины проекции единичного вектора Солнца на оси орбитального базиса = λ ·
= λ ·  = (λ11, λ21, λ31)T, (1) где
= (λ11, λ21, λ31)T, (1) где = (1,0,0)Т, λ =
= (1,0,0)Т, λ = 


После раскрутки гиромоторов блока датчиков угловых скоростей в БИНС, интегрируя кинематические уравнения, вычисляется матрица Н перехода от текущего положения КА к инерциальному базису  , совпадающему на момент начала интегрирования кинематических уравнению осей связанного с КА базиса
, совпадающему на момент начала интегрирования кинематических уравнению осей связанного с КА базиса  .
.
По команде от блока, реализующего выполнения циклограммы управления, в момент времени tS блок датчиков измерения направления на Солнце (например, со сферическим полем обзора) выполняет измерение проекций единичного вектора Солнца  в связанном базисе.
в связанном базисе.
На этот же момент времени фиксируется матрица текущего углового положения КА Н (tS), вычисляются и запоминаются проекции вектора Солнце на базис  :
: (ts) = H(ts)·
(ts) = H(ts)·  (ts)
(ts)
Далее в БИНС непрерывно вычисляются текущие координаты вектора Солнца =
=  (t) = HТ(t)
(t) = HТ(t) (ts), (2) при этом датчики Солнца могут быть выключены.
(ts), (2) при этом датчики Солнца могут быть выключены.
Блок определения текущего угла СОЗ вычисляют αсоз по следующему соотношению:
αсоз=Arccos(λ11), определяемому из скалярного произведения
cos αcos= ( ,
,  ), где
), где  = (1,0,0)T - единичный вектор направления на центр Земли;
= (1,0,0)T - единичный вектор направления на центр Земли;
SQ= (λ11,λ21,λ31)T (см. (1)).
Блок определения угла между ОВ ПМВ и направлением Солнца вычисляют
αS-OB = Arccos( ,
,  ) = Arccos(S
) = Arccos(S ) , где
) , где = (S
= (S , S
, S , S
, S )T (см (2))
)T (см (2))
Далее вычисляют разность - угловое отклонение Δα=αS-OB-αсоз
Затем вычисляют координаты единичного вектора  , направление которого определяет вектор угловой скорости с обратным знаком для плоского поворота с целью достижения равенства углов αсоз=αS-OBпо наикратчайшему пути
, направление которого определяет вектор угловой скорости с обратным знаком для плоского поворота с целью достижения равенства углов αсоз=αS-OBпо наикратчайшему пути = - [
= - [ ] Sign Δα/
] Sign Δα/ [
[ r
r ]
] , где sign Δα =
, где sign Δα = 
Вычисляется кватернион рассогласования
M =  cos
cos ,
,  sin
sin  ,
,  sin
sin  ,
,  sin
sin 
После формирования кватернионов М кинематический и динамический контур управления, реализованные по известным законам, осуществляют операции по управлению поворотом КА, в результате которых величина рассогласования Δα сводится к нулю (с точностью до погрешностей ориентации), т.е.  поворачивается в плоскости 4 до совмещения с Х.
поворачивается в плоскости 4 до совмещения с Х.
При достижении и поддержании Δα < Δαдоп в течение заданного времени формируется признак "Готовность" к развороту вокруг направления на Солнце. Далее по известным соотношениям формируются скорости коррекции, вызывающие поворот КА
После формирования кватернионовМ кинематический и динамический контур управления, реализованные по известным законам, осуществляют операции по управлению поворотом КА, в результате которых величина рассогласования Δα сводится к нулю ( с точностью до погрешностей ориентации ), т.е. rПМВ поворачивается в плоскости 4 до совмещения с Х.
При достижении и поддержании Δα< Δαдопуст в течение заданного времени, формируется признак "Готовность" к развороту вокруг направления на Солнце. Далее по известным соотношениям формируются скорости коррекции, вызывающие поворот КА вокруг направления на Солнце при одновременном устранении рассогласования Δα , при этом ОВ ПМВ перемещается по конической поверхности 5. После совмещения оси визирования ПМВ с МВ планеты Земля 3, определяемого по сигналам датчика ПМВ, поворот завершается и управление передается контуру поддержания орбитальной ориентации.
Таким образом, благодаря выполнению минимально возможных разворотов КА и устранению времени ожидания расчетного угла СОЗ достигается сокращение времени построения ориентации по МВ.
Область применения: в космической технике при проектировании систем управления движением (СУД) космического аппарата (КА). Сущность изобретения: при ориентации КА относительно направления на Солнце по углам "Солнце-объект-Земля" и "Солнце-обьект-ось визирования датчика местной вертикали" КА поворачивают в плоскости ось визирование - направление на Солнце. При этом угол между осью визирования и направлением на Солнце достигает расчетной величины угла "Солнце-объект-Земля". 1 ил.
СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО МЕСТНОЙ ВЕРТИКАЛИ ПЛАНЕТЫ, включающий ориентацию аппарата относительно направления на Солнце, определение угла Солнце-объект-Земля, сравнение его с углом Солнце-объект-ось визирования датчика местной вертикали и поворот аппарата вокруг направления на Солнце после достижения разностью сравниваемых углов заданного значения до совмещения оси визирования датчика с местной вертикалью, отличающийся тем, что ориентацию аппарата относительно направления на Солнце выполняют путем поворота аппарата и оси визирования датчика в плоскости оси визирования направление на Солнце до достижения угла между осью визирования и направлением на Солнце расчетной величины угла Солнце-объект-Земля.
| Мирошниченко Л.А | |||
| и др | |||
| "Системы ориентации и стабилизации спутника телевизионного вещания "Экран", Изв.АН СССР, Техническая кибернетика, М.: Наука, 1977, N 4. |

