Изобретение относится к транспортному машиностроению и может быть использовано для управления системой распределения крутящих моментов, подводимых к колесам двухосных полноприводных автомобилей с шарнирно-сочленённой рамой.
Известно [1], что в случае движения в сложных дорожных условиях со значительными силами внешних сопротивлений и неоднородной в сцепном отношении опорной поверхностью с целью повышения управляемости автомобилем целесообразно применять жесткую кинематическую связь между ведущими колесами. В этом случае устраняется возможность относительного вращения ведущих колес, тем самым обеспечивается распределение крутящих моментов пропорционально сцепным возможностям ведущих колес.
Недостатком жесткой кинематической связи является снижение управляемости транспортным средством при криволинейном движении вследствие неизбежного кинематического несоответствия.
Известен способ снижения кинематического несоответствия [1] за счет приложения тормозного момента к буксующим колесам и уменьшения подачи топлива для предварительного выравнивания угловых скоростей буксующих колес и последующей блокировки межосевого и межколесных дифференциалов.
Этот способ также не позволяет устранить кинематическое несоответствие при криволинейном движении транспортного средства и, тем самым, повысить управляемость транспортного средства.
В качестве прототипа выбран способ распределения крутящих моментов [2], заключающийся в том, что выходной момент электродвигателя индивидуального привода колеса транспортного средства формируется при сопоставлении теоретической и фактической угловых скоростей колес транспортного средства, при этом теоретические угловые скорости вращения колес соответствуют траекториям их движения. Фактическая скорость определяется путем установки датчиков угловых скоростей на каждом колесе.
Теоретические угловые скорости вращения колес транспортного средства с шарнирно-сочлененной рамой при его установившемся криволинейном движении с постоянным радиусом кривизны могут быть рассчитаны на основе нахождения мгновенного центра скоростей [3]. В качестве исходных данных для расчета используются геометрические параметры транспортного средства с шарнирно-сочлененной рамой и угол складывания передней и задней секции, при этом мгновенный центр скоростей машины находят на пересечении перпендикуляров, построенных к векторам скоростей точек, являющихся серединами колеи передней и задней полурам.
Недостаток данного способа управления системой распределения крутящих моментов заключается в том, что он не позволяет определить требуемые для кинематического соответствии теоретические угловые скорости вращения колес в процессе изменении кривизны траектории движения транспортного средства за счет изменения угла складывания секций транспортного средства, что снижает управляемость транспортного средства.
Целью изобретения является повышение управляемости двухосных полноприводных транспортных средств с шарнирно-сочленённой рамой за счет оптимизации подводимых к колесам крутящих моментов, обеспечивающих кинематическое соответствие при изменении кривизны движения транспортного средства.
Указанная цель достигается за счет того, что с помощью датчиков дополнительно измеряют угловые скорости поворота секций относительно шарнира сцепки и рассчитывают теоретическую угловую скорость вращения колес с учетом вращательного движения их центров относительно шарнира сцепки.
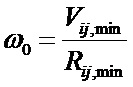
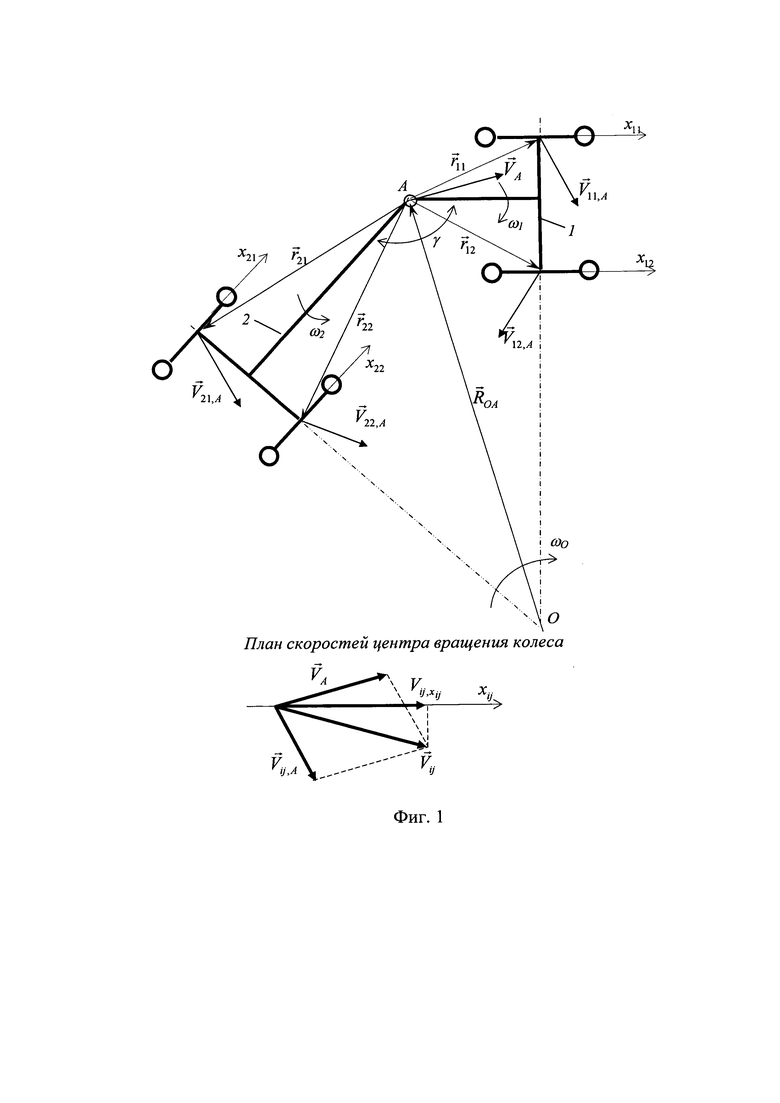
На фиг. 1 изображена кинематическая схема поворота транспортного средства с шарнирно-сочлененной рамой, на фиг. 2 - вариант механизма складывания секций, обеспечивающий контроль угловой скорости поворота секций относительно шарнира сцепки.
Движение транспортного средства, состоящего из шарнирно- сочленённых передней 1 и задней 2 секций, со скоростью  может быть представлено в виде вращательного движения транспортного средства с угловой скоростью
может быть представлено в виде вращательного движения транспортного средства с угловой скоростью  относительно мгновенного центра скоростей
относительно мгновенного центра скоростей  , находящегося в точке пересечения осей вращения колес передней 1 и задней 2 секций.
, находящегося в точке пересечения осей вращения колес передней 1 и задней 2 секций.
Скорость  шарнира сценки А составит
шарнира сценки А составит
 , (1)
, (1)
где  - радиус-вектор шарнира сценки А относительно мгновенного центра скоростей .
- радиус-вектор шарнира сценки А относительно мгновенного центра скоростей .
Изменение кривизны движения транспортного средства с шарнирно-сочлененной рамой достигается за счет поворота передней 1 и задней 2 секции относительно шарнира сценки А с угловыми скоростями  и
и  соответственно посредством механизма складывания. При этом происходит изменение угла
соответственно посредством механизма складывания. При этом происходит изменение угла  складывания передней 1 и задней 2 секций.
складывания передней 1 и задней 2 секций.
При изменении кривизны движения транспортного средства с шарнирно-сочленённой рамой за счет изменения угла складывания секций скорости  центров колес составят
центров колес составят
 , (2)
, (2)
 , (3)
, (3)
где индекс  обозначает переднюю и заднюю секции соответственно, индекс
обозначает переднюю и заднюю секции соответственно, индекс  обозначает колеса каждой секции,
обозначает колеса каждой секции,  - радиус-векторы центров колес транспортного средства относительно шарнира сцепки
- радиус-векторы центров колес транспортного средства относительно шарнира сцепки  ,
,  - скорости вращательного движения центров колес относительно шарнира сцепки .
- скорости вращательного движения центров колес относительно шарнира сцепки .
Значения теоретических угловых скоростей вращения колес составят
 , (4)
, (4)
где  - проекция скорости
- проекция скорости  центра колеса на ось
центра колеса на ось  , образованную пересечением плоскости вращения соответствующего колеса относительно его центра и плоскости, в которой лежат векторы
, образованную пересечением плоскости вращения соответствующего колеса относительно его центра и плоскости, в которой лежат векторы  и
и  ,
,  - радиус колеса.
- радиус колеса.
Реализация способа осуществляется следующим образом. При движении непрерывно контролируется угловые скорости вращения колес  , угол
, угол  складывания передней и задней секций, угловые скорости поворота передней
складывания передней и задней секций, угловые скорости поворота передней  и задней
и задней  секции относительно шарнира сцепки, значения которых блок приема сигналов подает в блок обработки информации.
секции относительно шарнира сцепки, значения которых блок приема сигналов подает в блок обработки информации.
Блок обработки информации выполняет следующие операции:
1. Определяет колесо с наименьшей угловой скоростью вращения 
2. Рассчитывает скорость  движения его центра по формуле
движения его центра по формуле
 .
.
3. Рассчитывает радиус  вращательного движения центра этого колеса относительно мгновенного центра скоростей
вращательного движения центра этого колеса относительно мгновенного центра скоростей  .
.
4. Рассчитывает угловую скорость  вращательного движения транспортного средства относительно мгновенного центра скоростей по формуле
вращательного движения транспортного средства относительно мгновенного центра скоростей по формуле
 .
.
5. Рассчитывает по формулам (1-4) теоретические угловые скорости вращения остальных колес.
6. Сравнивает теоретические значения с фактическими и подает сигнал на блок управления тяговыми электродвигателями для изменения крутящих моментов и изменения, благодаря, этому фактических угловых скоростей вращения колес.
Затем цикл обработки информации повторяется.
Контроль угла складывания передней и задней секций, угловых скоростей поворота передней и задней  секции относительно шарнира сцепки могут быть реализованы посредством механизма складывания секций, пояснённого на фиг. 2. Корпуса передней 1 и задней 2 секции соединены осью 3 шарнира сцепки с возможностью их относительного поворота относительно нее. На оси 3 шарнира сцепки жестко закреплено зубчатое колесо 4 с радиусом
секции относительно шарнира сцепки могут быть реализованы посредством механизма складывания секций, пояснённого на фиг. 2. Корпуса передней 1 и задней 2 секции соединены осью 3 шарнира сцепки с возможностью их относительного поворота относительно нее. На оси 3 шарнира сцепки жестко закреплено зубчатое колесо 4 с радиусом  , введенное в зацепление с зубчатыми колесами 5 и 6, жестко закрепленными на валах 7 и 9 электродвигателей 10 и 11, при этом электродвигатель 10 закреплен на передней секции 1, а электродвигатель 11 закреплен на задней секции 2. Рядом с зубчатыми колесами 5 и 6 на корпусах передней 1 и задней секций 2 установлены датчики угловых скоростей вращения 12 и 13.
, введенное в зацепление с зубчатыми колесами 5 и 6, жестко закрепленными на валах 7 и 9 электродвигателей 10 и 11, при этом электродвигатель 10 закреплен на передней секции 1, а электродвигатель 11 закреплен на задней секции 2. Рядом с зубчатыми колесами 5 и 6 на корпусах передней 1 и задней секций 2 установлены датчики угловых скоростей вращения 12 и 13.
Устройство складывания секций работает следующим образом. Посредством подачи электрической энергии на электродвигатели 10 и 11 плавно увеличивают моменты вращения зубчатых колес 5 и 6 так, чтобы в каждый момент времени они были одинаковыми по модулю и противоположными по направлению. Из-за одинакового диаметра зубчатые колеса 5 и 6 действуют на зубчатое колесо 4 с одинаковыми по модулю силами  , приводя к образованию моментов
, приводя к образованию моментов  , одинаковых по модулю и противоположных по направлению, стремящихся повернуть секции относительно оси сцепки, при этом
, одинаковых по модулю и противоположных по направлению, стремящихся повернуть секции относительно оси сцепки, при этом
 .
.
Повороту секций относительно оси 3 шарнира сцепки препятствуют возникающие силы трения покоя  и
и  между колесами 14 передней 1 и колесами 15 задней 2 секции и опорной поверхностью, при этом вращение зубчатых колес 5 и 6 отсутствует.
между колесами 14 передней 1 и колесами 15 задней 2 секции и опорной поверхностью, при этом вращение зубчатых колес 5 и 6 отсутствует.
Моменты повышаются до превышения колесами какой-либо секции наибольшей силы трения покоя, после чего начинается поворот этой секции относительно оси 3 шарнира сцепки, сопровождающийся вращением зубчатого колеса, размещенного на этой секции, при этом из-за равенства модулей сил зубчатое колесо 4 остается неподвижным.
Например, если при достижении некоторого момента наибольшая сила трения покоя достигается для колес 14 секции 1, то начинается поворот секции 1 относительно оси 3 шарнира сцепки, сопровождающийся вращением зубчатого колеса 5.
Угловые скорости вращения зубчатых колес 5 и 6 контролируется датчиками 12 и 13 угловых скоростей вращения.
Сигналы с датчиков 12 и 13 могут быть использованы для расчёта угла  складывания секций в блоке обработки информации, что исключает необходимость использования отдельного датчика угла складывания секций.
складывания секций в блоке обработки информации, что исключает необходимость использования отдельного датчика угла складывания секций.
Список использованных источников.
1. Келлер А.В., Мурог И.А., Алюков С.В. Метод введения жесткой кинематической связи для эффективного распределения мощности в транспортных средствах // URL: http://www.rusnauka.com/39_VSN_2014/Tecnic/4_181744.doc.htm
2. Котиев Г. О., Горелов В. А., Мирошниченко А. В. Синтез системы управления тяговыми электродвигателями для индивидуального привода ведущих колес автомобиля // Машиностроение и компьютерные технологии. 2011. №12. URL: https://cyberleninka.ru/article/n/sintez-sistemy-upravleniya-tyagovymi-elektrodvigatelyami-dlya-individualnogo-privoda-vedu
3. Бояркина Ирина Владимировна Основные параметры кинематики поворота погрузчика с шарнирно - сочлененной рамой // Вестник СибАДИ. 2012. №2 (24). URL: https://cyberleninka.ru/article/n/osnovnye-parametry-kinematiki-povorota-pogruzchika-s-sharnirno-sochlenennoy-ramoy
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухколёсное транспортное средство с колёсной формулой 2х2 | 2023 |
|
RU2810226C1 |
| Двухколесное транспортное средство с колесной формулой 2х2 | 2022 |
|
RU2782283C1 |
| ПОЛНОПРИВОДНОЕ ОДНОКОЛЕЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1993 |
|
RU2087368C1 |
| ПОЛНОПРИВОДНЫЙ ВЕЛОСИПЕД | 2008 |
|
RU2379211C1 |
| МОТОЦИКЛ ВНЕДОРОЖНЫЙ ПОЛНОПРИВОДНЫЙ | 2022 |
|
RU2792786C1 |
| ОДНОКОЛЕЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1993 |
|
RU2087369C1 |
| ТРАНСМИССИЯ СОЧЛЕНЁННОГО НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2524205C1 |
| Полноприводный автомобиль повышенной проходимости с электрическим приводом колёс | 2022 |
|
RU2786903C1 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340473C2 |
| ШАССИ ПОЛНОПРИВОДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2127687C1 |
Изобретение относится к транспортному машиностроению. Согласно способу распределения крутящих моментов, подводимых к колесам двухосного полноприводного транспортного средства с шарнирно-сочленённой рамой, выходные моменты электродвигателей индивидуальных приводов колес формируются при сопоставлении теоретических и фактических угловых скоростей вращения колес транспортного средства. Теоретические угловые скорости вращения колес рассчитываются с учетом угла складывания секций. С помощью датчиков дополнительно измеряют угловые скорости поворота секций относительно шарнира сцепки. Достигается повышение управляемости двухосных полноприводных транспортных средств с шарнирно-сочленённой рамой за счет оптимизации подводимых к колесам крутящих моментов, обеспечивающих кинематическое соответствие при изменении кривизны движения транспортного средства. 2 ил.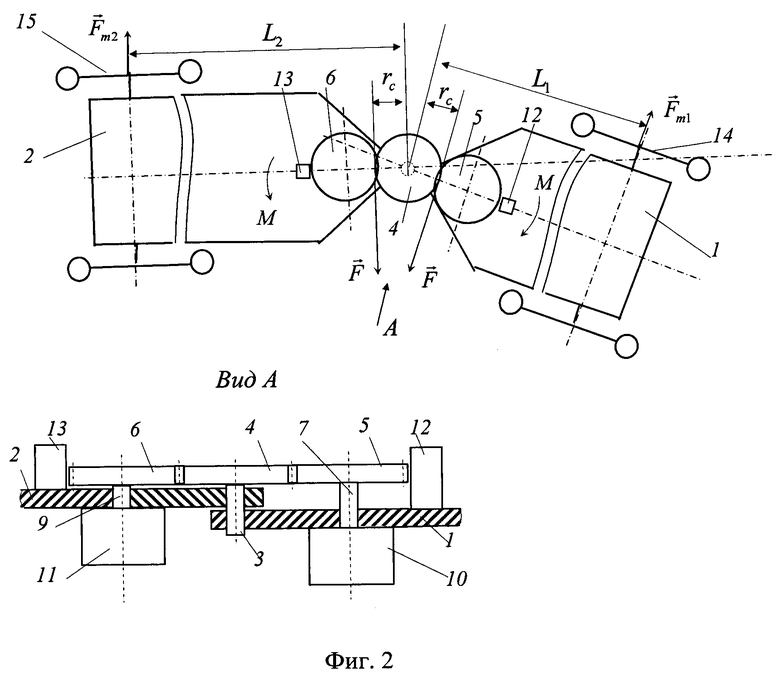
Способ распределения крутящих моментов, подводимых к колесам двухосного полноприводного транспортного средства с шарнирно-сочленённой рамой, заключающийся в том, что выходные моменты электродвигателей индивидуальных приводов колес формируются при сопоставлении теоретических и фактических угловых скоростей вращения колес транспортного средства, при этом теоретические угловые скорости вращения колес рассчитываются с учетом угла складывания секций, отличающийся тем, что с помощью датчиков дополнительно измеряют угловые скорости поворота секций относительно шарнира сцепки, при этом угловые скорости вращения колес  находят по формулам
находят по формулам
 ,
,

 ,
,
где индекс  обозначает переднюю и заднюю секции соответственно, индекс
обозначает переднюю и заднюю секции соответственно, индекс  обозначает колеса каждой секции,
обозначает колеса каждой секции,  - проекция скорости
- проекция скорости  центра колеса на ось
центра колеса на ось  , образованную пересечением плоскости вращения соответствующего колеса относительно его центра и плоскости, в которой лежат векторы
, образованную пересечением плоскости вращения соответствующего колеса относительно его центра и плоскости, в которой лежат векторы  и
и  ,
,  - радиус колеса, - скорость вращательного движения шарнира сцепки относительно мгновенного центра скоростей,
- радиус колеса, - скорость вращательного движения шарнира сцепки относительно мгновенного центра скоростей,  - скорость вращательного движения центров колес относительно шарнира сцепки,
- скорость вращательного движения центров колес относительно шарнира сцепки,  - радиус-векторы центров колес транспортного средства относительно шарнира сцепки,
- радиус-векторы центров колес транспортного средства относительно шарнира сцепки,  - угловая скорость вращательного движения транспортного средства относительно мгновенного центра скоростей,
- угловая скорость вращательного движения транспортного средства относительно мгновенного центра скоростей,  - угловая скорость вращательного движения центров колес относительно шарнира сцепки.
- угловая скорость вращательного движения центров колес относительно шарнира сцепки.
| СПОСОБ РАСПРЕДЕЛЕНИЯ КРУТЯЩИХ МОМЕНТОВ, ПОДВОДИМЫХ К КОЛЕСАМ ПОЛНОПРИВОДНЫХ АВТОМОБИЛЕЙ | 2012 |
|
RU2640663C2 |
| Установка для облучения семян гамма-лучами | 1959 |
|
SU130261A1 |
| СПОСОБ И УСТРОЙСТВО РАСПРЕДЕЛЕНИЯ КРУТЯЩЕГО МОМЕНТА МЕЖДУ ПЕРЕДНИМ МОСТОМ И ЗАДНИМ МОСТОМ АВТОТРАНСПОРТНОГО СРЕДСТВА, ОСНАЩЕННОГО ЧЕТЫРЬМЯ ВЕДУЩИМИ КОЛЕСАМИ | 2010 |
|
RU2550621C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ РАСПРЕДЕЛЕНИЕМ КРУТЯЩЕГО МОМЕНТА МЕЖДУ ДВУМЯ КОЛЕСНЫМИ ОСЯМИ МОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2575736C2 |
| СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ РАСПРЕДЕЛЕНИЯ КРУТЯЩЕГО МОМЕНТА МЕЖДУ ПЕРЕДНЕЙ И ЗАДНЕЙ КОЛЕСНЫМИ ОСЯМИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2561485C2 |

