Область техники, к которой относится изобретение
Изобретение относится к распределению крутящего момента между передним мостом и задним мостом автотранспортного средства, оснащенного четырьмя ведущими колесами.
В частности, изобретение относится к передаче крутящего момента от переднего моста на задний мост такого транспортного средства.
Уровень техники
В настоящее время транспортные средства с четырьмя ведущими колесами, называемые также транспортными средствами повышенной проходимости, предназначены для преодоления препятствий любого вида и требуют обеспечения режима привода, соответствующего условиям перемещения транспортного средства. Действительно, когда транспортное средство движется по бездорожью, условия перемещения транспортного средства являются сложными, и скорость транспортного средства является низкой или средней.
В связи с этим ведется поиск улучшения режима привода и расхода топлива транспортного средства, в частности, при трогании с места и преодолении препятствий.
Можно, например, упомянуть документ US 5752211, в котором раскрыт способ распределения крутящего момента между передним мостом и задним мостом, согласно которому вычисляют рассогласование скоростей между мостами, которое является кубической функцией скорости транспортного средства и которое вычитают из заданной величины команды распределения момента. Однако этот способ не учитывает условий перемещения транспортного средства по бездорожью, в частности, когда скорость транспортного средства является низкой или средней.
Можно также указать документ ЕР 1188597, в котором описано устройство управления распределением крутящего момента транспортного средства, оснащенного четырьмя ведущими колесами, на основании обнаружения изменения диаметра шин, связанного с износом или с заменой шин. Однако этот документ не учитывает условий перемещения транспортного средства по бездорожью.
Кроме того, в документе ЕР 1275549 раскрыт алгоритм распределения крутящего момента между передним и задним мостами в зависимости от различных сигналов, таких как скорость колес, режим двигателя, положение педали акселератора. В этом документе предложен способ для оптимизации команды распределения крутящего момента между двумя мостами, но он не описывает, каким образом вычисляют заданную величину команды распределения крутящего момента.
Кроме того, в документе JP 10119598 описана система контроля, которая понижает приводную мощность, подаваемую на задние колеса, и повышает приводную мощность, подаваемую на передние колеса, когда задние колеса начинают пробуксовывать. Однако в ней тоже не описано, каким образом вычисляют заданную величину команды распределения мощности.
Раскрытие изобретения
Задача изобретения состоит в создании средства для улучшения распределения крутящего момента между передним мостом и задним мостом транспортного средства, оснащенного четырьмя ведущими колесами и оборудованного источником тягового момента, таким как электрический двигатель, двигатель внутреннего сгорания или гибридное решение.
Также задачей изобретения является создание средства для распределения крутящего момента между передним и задним мостами транспортного средства при движении по бездорожью.
Также задача изобретения состоит в создании средства для формирования соответствующей команды распределения момента таким образом, чтобы увеличить способность преодоления препятствий и одновременно снизить расход топлива транспортным средством.
Поставленная задача решена в устройстве распределения крутящего момента между передним мостом и задним мостом автотранспортного средства, по меньшей мере, с четырьмя ведущими колесами, содержащем управляемый привод, выполненный с возможностью распределения крутящего момента, и средства вычисления скорости транспортного средства и разности скорости между передним мостом и задним мостом.
Это устройство содержит средства формирования команды распределения момента, предназначенной для привода, при этом средства формирования содержат исходное средство определения, предназначенное для определения первого значения заданной величины распределения момента, равного либо максимальному постоянному значению, если скорость транспортного средства ниже нижнего порога, либо функции скорости транспортного средства и разности скоростей, если скорость транспортного средства находится в пределах между нижним порогом и верхним порогом, либо нулю, если скорость транспортного средства превышает верхний порог.
Таким образом, получают средство для вычисления заданной величины команды распределения крутящего момента в зависимости от условий перемещения транспортного средства по бездорожью, с целью оптимизации расхода топлива и способности преодоления препятствий.
Кроме того, устройство позволяет отдавать предпочтение преодолению препятствий и/или расходу топлива в зависимости от условий вождения по бездорожью.
Предпочтительно исходное средство определения выполнено с возможностью определения первого значения заданной величины распределения момента, находящегося в интервале, границы которого меняются в зависимости от скорости транспортного средства, при этом границы отличаются друг от друга, когда скорость транспортного средства находится в пределах между нижним порогом и верхним порогом.
Таким образом, крутящий момент можно передавать, даже если рассогласование скоростей между мостами является нулевым, при этом обеспечивают эффективность преодоления препятствий и снижение расхода по сравнению с алгоритмом, применяемым, когда скорость транспортного средства ниже нижнего порога.
Исходное средство определения можно также выполнить с возможностью определения промежуточного порога скорости, находящегося между нижним порогом и верхним порогом, при этом нижняя граница интервала является нулевой, когда скорость транспортного средства находится в пределах между промежуточным порогом скорости и верхним порогом.
В это случае оптимизируется расход топлива.
Кроме того, средства формирования могут содержать вторичное средство определения, предназначенное для определения второго значения заданной величины распределения момента, меньшего первого значения и равного либо минимальному постоянному значению, если скорость транспортного средства ниже минимального порога, либо только функции скорости транспортного средства, если скорость транспортного средства находится между минимальным порогом и максимальным порогом, либо нулю, если скорость транспортного средства превышает максимальный порог, и средство выбора, предназначенное для выбора первого или второго значения для формирования команды распределения момента.
В альтернативном варианте, если средства вычисления выполнены с возможностью вычисления включенной передачи, средства формирования могут содержать вторичное средство определения, предназначенное для определения второго значения заданной величины распределения момента, меньшего первого значения и равного либо минимальному постоянному значению, если скорость транспортного средства ниже минимального порога, тогда как включенной передачей является первая передняя передача или задняя передача, либо нулю, если скорость транспортного средства превышает минимальный порог или включенная передача отличается от первой передней передачи и от задней передачи, и средство выбора, предназначенное для выбора первого или второго значения для формирования команды распределения момента.
Когда ситуация вождения транспортного средства не требует распределения максимального момента, заданную величину распределения момента уменьшают, применяя заданную величину распределения минимального момента, меньшую предыдущей заданной величины распределения максимального момента. При этом оптимизируется расход топлива.
Средства вычисления могут быть выполнены с возможностью определения положения педали акселератора и включенной передачи, и средства формирования содержат средство управления выбором, выполненное с возможностью активации командного сигнала выбора, если положение педали акселератора выше верхнего порога ускорения и если включенная передача не является нулевой, при этом средство выбора выполнено с возможностью приема командного сигнала выбора и с возможностью выбора первого значения, если командный сигнал выбора активирован, или второго значения, если командный сигнал выбора деактивирован.
Средства формирования могут также содержать средство передачи, предназначенное для передачи значения, выбранного средством выбора, или нулевого значения с целью формирования команды распределения момента, и средство управления передачей, выполненное с возможностью активации командного сигнала передачи во время остановки, если скорость транспортного средства ниже порога остановки, при этом средство передачи выполнено с возможностью приема командного сигнала передачи и с возможностью передачи значения, выбранного средством выбора, если командный сигнал передачи деактивирован, или нулевого значения, если командный сигнал передачи активирован.
В альтернативном варианте, если средства вычисления выполнены с возможностью вычисления положения педали акселератора, можно предусмотреть, чтобы средства формирования содержали средство передачи, предназначенное для передачи значения, выбранного средством выбора, или нулевого значения с целью формирования команды распределения момента, и средство управления передачей, выполненное с возможностью активации командного сигнала передачи во время остановки, если скорость транспортного средства понижается ниже порога остановки, тогда как педаль акселератора не нажата, при этом средство передачи выполнено с возможностью приема командного сигнала передачи и с возможностью передачи значения, выбранного средством выбора, если командный сигнал передачи деактивирован, или нулевого значения, если командный сигнал передачи активирован.
Таким образом, повышается надежность цепи распределения крутящего момента и уменьшается паразитный шум, возникающий при переключении передачи передняя/задняя.
Другим объектом изобретения является способ распределения крутящего момента между передним мостом и задним мостом автотранспортного средства, по меньшей мере, с четырьмя ведущими колесами, в котором вычисляют скорость транспортного средства и рассогласование скоростей между передним мостом и задним мостом.
В этом способе определяют первое значение заданной величины распределения момента, равное либо максимальному постоянному значению, если скорость транспортного средства ниже нижнего порога, либо функции скорости транспортного средства и рассогласованию скоростей, если скорость транспортного средства находится в пределах между нижним порогом и верхним порогом, либо нулю, если скорость транспортного средства превышает верхний порог, и крутящий момент распределяют на основании определенной заданной величины распределения момента.
Предпочтительно во время этапа определения дополнительно определяют первое значение заданной величины распределения момента, включенное в интервал, границы которого меняются в зависимости от скорости транспортного средства, при этом границы отличаются друг от друга, когда скорость транспортного средства находится в пределах между нижним порогом и верхним порогом.
Кроме того, во время этапа определения можно определять промежуточный порог скорости, находящийся между нижним порогом и верхним порогом, при этом нижняя граница интервала является нулевой, когда скорость транспортного средства находится в пределах между промежуточным порогом скорости и верхним порогом.
Можно также определять второе значение заданной величины распределения момента, меньшее первого значения и равное либо минимальному постоянному значению, если скорость транспортного средства ниже минимального порога, либо только функции скорости транспортного средства, если скорость транспортного средства находится между минимальным порогом и максимальным порогом, либо нулю, если скорость транспортного средства превышает максимальный порог, и выбирать первое или второе значение для определения заданной величины распределения момента.
Можно также вычислять положение педали акселератора и включенную передачу, активировать командный сигнал выбора, если положение педали акселератора выше порога ускорения и если включенная передача не является нулевой, и выбирать первое значение, если командный сигнал выбора активирован, или второе значение, если командный сигнал выбора деактивирован.
Можно также активировать командный сигнал передачи, если скорость транспортного средства ниже порога остановки во время остановки, и передавать первое или второе выбранное значение, если командный сигнал передачи активирован, или нулевое значение, если командный сигнал передачи деактивирован, для определения заданной величины команды распределения момента.
Краткое описание чертежей
Другие задачи, отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания, представленного только в качестве неограничивающего примера, со ссылками на прилагаемые чертежи.
На фиг.1 показана схема устройства распределения крутящего момента автотранспортного средства;
на фиг.2 показана схема варианта осуществления средств формирования заданной величины распределения момента;
на фиг.3 показана схема варианта осуществления исходного средства определения первого значения заданной величины распределения момента;
на фиг.4 показана схема варианта осуществления алгоритма активации/деактивации командного сигнала передачи;
на фиг.5 показана схема варианта осуществления алгоритма активации/деактивации командного сигнала выбора;
на фиг.6 показана схема альтернативного варианта применения алгоритма активации/деактивации командного сигнала передачи;
на фиг.7 показана схема альтернативного варианта осуществления средств формирования заданной величины распределения момента;
на фиг.8 показана схема альтернативного варианта применения алгоритма активации/деактивации командного сигнала выбора.
Для большей ясности идентичные или аналогичные элементы обозначены на всех фигурах одинаковыми позициями.
Осуществление изобретения
На фиг.1 показано устройство 1 распределения крутящего момента автотранспортного средства.
Автотранспортное средство содержит передний мост 2, на котором установлены два передних колеса 3 и 4, задний мост 5, на котором установлены два задних колеса 6 и 7, и источник 8 крутящего момента, предназначенный для приведения во вращение колес 3, 4, 6 и 7 автотранспортного средства. Этот источник 8 крутящего момента вращает задние колеса 6, 7 через заднее средство 9а трансмиссии и вращает передние колеса 3, 4 через переднее средство 9b трансмиссии. Источник 8 крутящего момента может быть электрическим двигателем, двигателем внутреннего сгорания или представлять собой гибридное решение. Кроме того, автотранспортное средство содержит коробку 10 передач для передачи крутящего момента на колеса 3, 4, 6 и 7 транспортного средства, педаль 11 акселератора и педаль 12 сцепления. Следует отметить, что педаль 12 сцепления является факультативной, поскольку транспортное средство может быть оборудовано автоматической коробкой передач, и в этом случае транспортное средство не имеет педали сцепления.
Устройство 1 распределения содержит электронный блок управления ЭБУ, управляемый привод 13 и датчики 14-17 скорости, предназначенные для измерения скорости соответственно каждого из колес 3, 4, 6 и 7 автотранспортного средства, а также два датчика 18 и 19 положения для измерения положений соответственно педали 11 акселератора и педали 12 сцепления.
Способ распределения крутящего момента автотранспортного средства, оснащенного четырьмя ведущими колесами, можно применять в электронном блоке управления ЭБУ устройства 1 распределения.
Блок ЭБУ выполнен с возможностью получения положения педали 11 акселератора от датчика 18 положения через линию 20, положения педали 12 сцепления от датчика 19 положения через линию 21, скоростей колес 3, 4, 6 и 7, поступающих соответственно от датчиков 14-17 скорости и передаваемых соответственно через линии 22-25.
Кроме того, блок ЭБУ выполнен с возможностью получения информации о включенной передаче от коробки 10 передач через линию 26. Блок ЭБУ позволяет формировать команду распределения момента в зависимости от данных скорости, положения и включенной передачи.
Блок ЭБУ дополнительно содержит средства 30 вычисления, предназначенные для вычисления различных данных на основании информации, поступающей от различных элементов автотранспортного средства, и для передачи вычисленных данных через проводную сеть 32 в средства 31 формирования. Эти средства 31 формирования входят в состав блока ЭБУ и предназначены для формирования команды распределения момента с целью ее передачи в управляемый привод 13 через линию 27. Средства формирования содержат, по меньшей мере, исходное средство 40 определения, предназначенное для определения первого значения заданной величины распределения момента.
Управляемый привод 13 выполнен с возможностью получения команды распределения момента от блока ЭБУ через линию 27. Этот управляемый привод 13 позволяет также распределять крутящий момент между передним и задним мостами 2, 5 транспортного средства, в частности, передавать крутящий момент от переднего моста 2 на задний мост 5 на основании команды распределения момента.
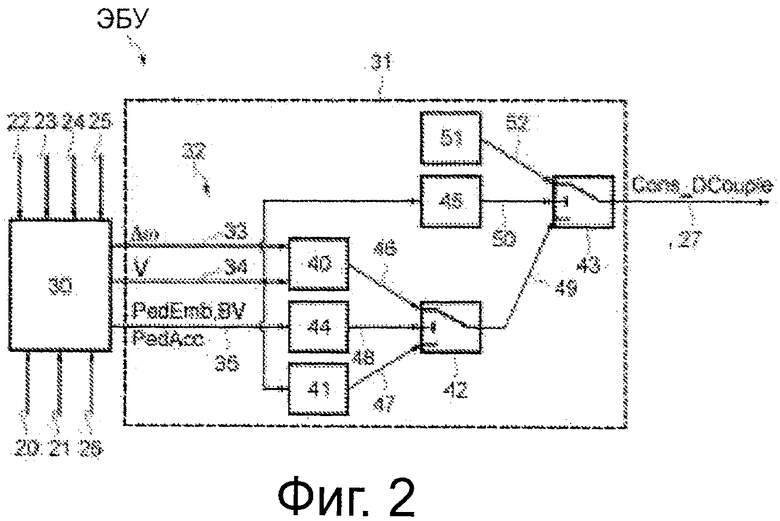
На фиг.2 схематично показан вариант выполнения средств 31 формирования команды Cons_DCouple распределения момента и средств 30 вычисления. На фиг.2 показаны также средства 30 вычисления и некоторые элементы, показанные на предыдущей фиг.1.
Средства 30 вычисления получают значения скорости колес 3, 4, 6 и 7 через линии 22-25 соответственно для вычисления скорости V транспортного средства и рассогласования скоростей Δω между передним мостом 2 и задним мостом 5. Эти средства 30 вычисления получают также положение PedAcc педали акселератора через линию 20, положение PedEmb педали сцепления через линию 21 и включенную передачу BV через линию 26.
Проводная сеть 32 содержит линии 33-35 соответственно для передачи рассогласования скоростей Δω, скорости V транспортного средства и данных транспортного средства, включая положение PedAcc педали акселератора, положение PedEmb педали сцепления и включенную передачу BV.
Средства 31 формирования содержат:
- исходное средство 40 определения,
- вторичное средство 41 определения,
- средство 42 выбора,
- средство 43 передачи,
- средство 44 управления выбором и
- средство 45 управления передачей.
Исходное средство 40 определения получает рассогласование скоростей Δω и скорость V транспортного средства соответственно через линии 33 и 34. Это исходное средство 40 определения позволяет определить первое значение Cmax заданной величины распределения момента и передать это первое значение Cmax в средство 42 выбора через линию 46. Первое значение Cmax определяют в зависимости от скорости V транспортного средства и от рассогласования скоростей Δω.
Вторичное средство 41 определения получает скорость V транспортного средства через линию 34 и позволяет определить второе значение Cmin заданной величины распределения момента и передать это второе значение Cmin в средство 42 выбора через линию 47. Второе значение Cmin определяют только в зависимости от скорости V транспортного средства.
Средство 44 управления выбором получает положения PedAcc педали акселератора и PedEmb педали сцепления, а также включенную передачу BV через линию 35, чтобы активировать или деактивировать командный сигнал Maxmin выбора. Этот командный сигнал Maxmin выбора передают через линию 48 в средство 42 выбора. Командный сигнал Maxmin выбора является булевым сигналом, который равен «1», если он активирован, и равен «0», если он деактивирован.
Средство 42 выбора выполнено с возможностью выбирать либо первое значение Cmax, либо второе значение Cmin и передавать выбранное значение в средство 43 передачи через линию 49. Кроме того, средство 42 выбора выполнено с возможностью передачи первого значения Cmax, когда командный сигнал Maxmin выбора актвирован, и передачи второго значения Cmin, когда командный сигнал Maxmin выбора деактивирован.
Кроме того, средство 45 управления передачей выполнено с возможностью получения скорости V транспортного средства через линию 34 для активации или деактивации командного сигнала Antibruit передачи. Это средство 45 управления передачей передает командный сигнал Antibruit передачи в направлении средства 43 передачи через линию 50. Командный сигнал Antibruit передачи является булевым сигналом, который равен «0», если он деактивирован, и равен «1», если он активирован.
Средство 43 передачи выполнено с возможностью выбора либо значения, выбранного средством 42 выбора, либо нулевого значения, чтобы передать выбранный результат в управляемый привод 13 через линию 27. Средство 43 передачи выбирает значение, принятое через линию 49 от средства 42 выбора, когда командный сигнал Antibruit передачи деактивирован, и выбирает нулевое значение, когда командный сигнал Antibruit передачи активирован. Нулевое значение вырабатывается средством 51 и передается через линию 52 в средство 43 передачи.
Средства формирования 31 вырабатывают заданную величину команды Cons_DCouple распределения момента, которая является либо нулевой, либо равна первому значению Cmax, которое соответствует максимальной заданной величине, либо равна второму значению Cmin, которое соответствует минимальной заданной величине.
Исходное средство 40 определения, а также средства 44 и 45 управления будут описаны ниже со ссылками на следующие фигуры.
Что касается вторичного средства 41 определения, то оно позволяет определять второе значение Cmin заданной величины Cons_DCouple распределения момента только в зависимости от скорости транспортного средства. Таким образом, можно указать три разных алгоритма выработки второго значения Cmin: алгоритм команды на низкой скорости, алгоритм на средней скорости и алгоритм на высокой скорости. При этом алгоритм адаптируют к ситуации вождения транспортного средства в условиях плохой проходимости, отдавая приоритет преодолению препятствий и/или расходу топлива. В зависимости от скорости транспортного средства различают три следующие алгоритма:
- когда транспортное средство движется на низкой скорости, то есть когда скорость транспортного средства ниже минимального порога, второе значение Cmin является постоянным значением и равно минимальному постоянному значению, которая представляет собой компромисс между эффективностью преодоления препятствий и снижением расхода топлива, а также возможность распределить момент на четыре колеса на спуске, не нажимая на педаль акселератора, чтобы получить оптимальный режим привода. Минимальный порог скорости и минимальное постоянное значение можно регулировать во время отладки и сохранить в энергонезависимой памяти транспортного средства;
- когда транспортное средство движется на средней скорости, то есть когда скорость V транспортного средства находится в пределах между минимальным порогом и максимальным порогом, второе значение Cmin является функцией скорости V транспортного средства. Эта функция является убывающей между минимальным постоянным значением и нулем. Таким образом, обеспечивается эффективность преодоления препятствий, и расход топлива снижается по сравнению с алгоритмом на низкой скорости. Максимальный порог скорости тоже можно регулировать во время отладки и сохранить в энергонезависимой памяти.
- когда транспортное средство движется на высокой скорости, то есть когда скорость V транспортного средства превышает максимальный порог, второе значение Cmin является нулевым. Расход топлива транспортным средством является при этом минимальным.
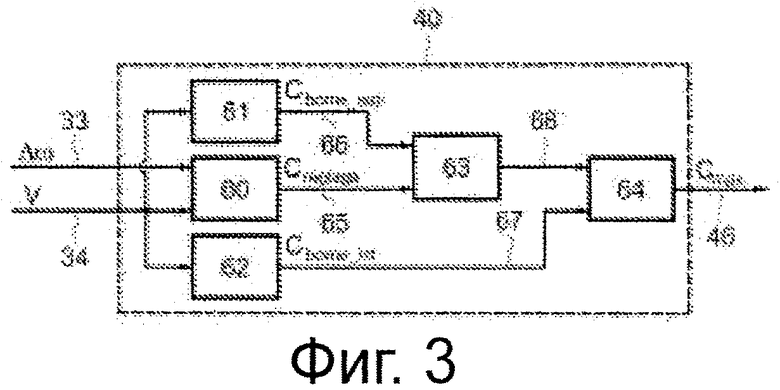
На фиг.3 схематично представлен вариант выполнения исходного средства 40 определения первого значения Cmax заданной величины команды Cons_DCouple распределения момента.
Исходное средство 40 определения содержит средство 60 регулировки, средство 61 выработки верхнего предела, средство 62 выработки нижнего предела и два средства 63, 64 сравнения.
Средство 60 регулировки выполнено с возможностью получения рассогласования скорости Δω и скорости V транспортного средства соответственно через линии 33 и 34, чтобы выработать заданную величину Créglage регулировки, затем передать эту заданную величину Créglage регулировки в первое средство 63 сравнения через линию 65. Средство 61 выработки верхнего предела принимает скорость V транспортного средства через линию 34, чтобы выработать верхний предел Cborne_sup, изменяющийся в зависимости от скорости V. Это средство 61 выработки передает верхний предел Cborne_sup в первое средство 63 сравнения через линию 66. Средство 62 выработки нижнего предела тоже принимает скорость V транспортного средства через линию 34, чтобы выработать нижний предел Cborne_inf. Это средство 62 выработки передает нижний предел Cborne_inf во второе средство 64 сравнения через линию 67.
Первое средство 63 сравнения позволяет выбрать минимальное значение между верхним пределом Cborne_sup и заданной величиной Créglage регулировки, затем передает результат во второе средство 64 сравнения через линию 68. Второе средство 64 сравнения позволяет выбрать максимальное значение между нижним пределом Cborne_inf и результатом, полученным от первого средства 63 сравнения, и передает результат Cmax, соответствующий первому значению заданной величины команды Cons_DCouple распределения момента, в средство 42 выбора через линию 46.
Исходное средство 40 определения позволяет определить заданную величину Créglage регулировки, в частности, на основании скорости V транспортного средства и рассогласования скорости Δω. Кроме того, исходное средство 40 определения позволяет определить первое значение Cmax на основании заданной величины Créglage регулировки таким образом, чтобы это первое значение Cmax находилось в интервале, ограниченном верхним пределом Cborne_sup и нижним пределом Cborne_inf.
Таким образом, можно идентифицировать четыре различные алгоритма выработки первого значения Cmax:
- алгоритм команды на низкой скорости,
- алгоритм команды на средней скорости,
- алгоритм команды на высокой скорости,
- алгоритм команды на сверхвысокой скорости.
При этом алгоритм адаптируют к ситуации вождения транспортного средства в условиях плохой проходимости, отдавая предпочтение преодолению препятствий и/или расходу топлива.
В зависимости от скорости V транспортного средства можно, таким образом, различать следующие четыре различные алгоритма:
- когда транспортное средство движется на низкой скорости, то есть когда скорость V транспортного средства ниже нижнего порога, первое значение Cmax является постоянным значением и равно максимальному постоянному значению. Это максимальное постоянное значение соответствует максимальному моменту, допустимому для управляемого привода 13 и для цепи распределения момента транспортного средства. В этом случае следует отметить, что верхний передел Cborne_sup равен нижнему пределу Cborne_inf и что эти пределы равны максимальному значению;
- когда транспортное средство движется на средней скорости, то есть когда скорость V транспортного средства находится в пределах между нижним порогом и промежуточным порогом скорости, первое значение Cmax является функцией скорости V транспортного средства и рассогласования скоростей Δω. Кроме того, это первое значение Cmax может быть ограничено снизу пределом Cborne_inf и сверху пределом Cborne_sup. Таким образом, распределение момента может происходить, когда нет рассогласования скоростей Δω между двумя мостами 2, 5 транспортного средства. Таким образом, обеспечивается эффективность преодоления препятствий, и расход топлива уменьшается по сравнению с алгоритмом на низкой скорости;
- когда транспортное средство движется на высокой скорости, то есть когда скорость V транспортного средства находится в пределах между промежуточным порогом скорости и верхним пределом, первое значение Cmax является функцией скорости V транспортного средства и рассогласования скоростей Δω. Кроме того, в этом алгоритме на высокой скорости первое значение Cmax может быть ограничено сверху пределом Cborne_sup, а нижний предел Cborne_inf является нулевым. Расход топлива транспортным средством при этом оптимизируется. Кроме того, когда между двумя мостами нет рассогласование скоростей, то есть когда разность скорости Δω=0, заданная величина Créglage регулировки является нулевой, и первое значение Cmax тоже является нулевым;
- когда транспортное средство движется на сверхвысокой скорости, то есть когда скорость V транспортного средства превышает верхний порог, первое значение Cmax является нулевым, кроме того, верхний предел Cborne_sup и нижний предел Cborne_inf тоже являются нулевыми. При этом расход топлива является минимальным.
При этих четырех алгоритмах, применяемых в исходном средстве 40 определения, используемые пороги скорости и пределы Cborne_sup, Cborne_inf можно регулировать во время отладки и сохранять в энергонезависимой памяти транспортного средства. Следует также отметить, что верхний Cborne_sup и нижний Cborne_inf пределы меняются в зависимости от скорости, убывая между максимальным постоянным значением и нулем.
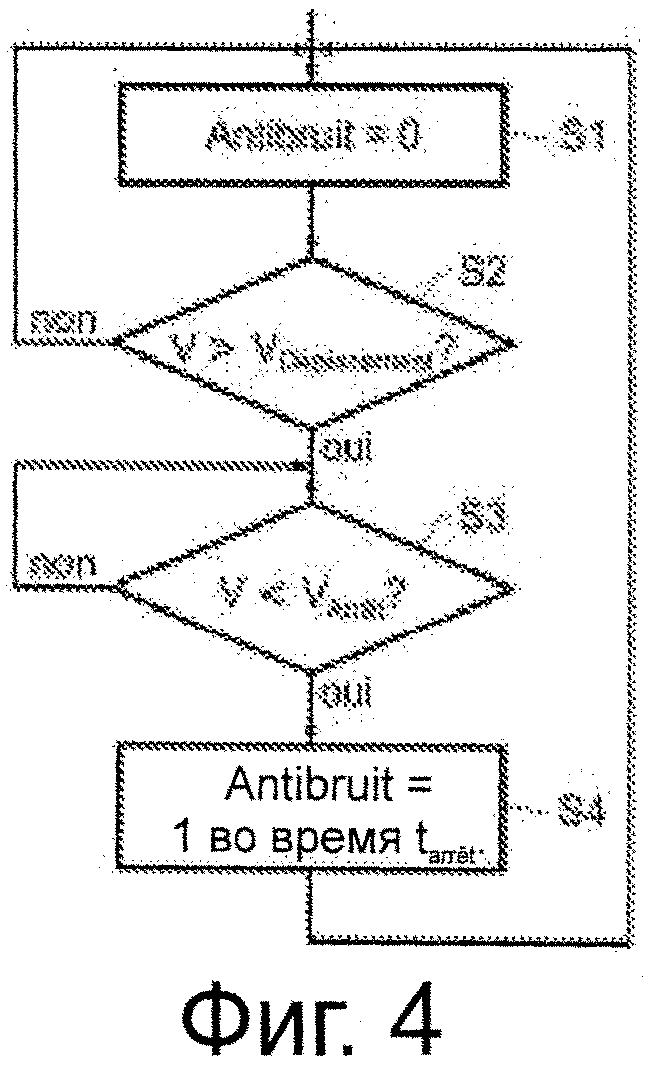
На фиг.4 схематично показан вариант применения алгоритма активации/деактивации командного сигнала Antibruit передачи.
Этот алгоритм активации/деактивации командного сигнала Antibruit передачи можно применять в описанном выше средстве 45 управления передачей. Этот алгоритм активации/деактивации позволяет активировать или деактивировать командный сигнал Antibruit передачи для управления средством 43 передачи.
Этот алгоритм активации/деактивации содержит первый этап S1, на котором командный сигнал Antibruit передачи устремляют к нулю. Затем осуществляют второй этап S2, на котором текущую скорость V транспортного средства сравнивают с порогом скорости Vdéplacement перемещения транспортного средства. Если скорость V транспортного средства превышает порог скорости Vdéplacement перемещения, осуществляют третий этап S3 сравнения, в противном случае опять осуществляют первый этап S1. Когда скорость V транспортного средства превышает порог скорости Vdéplacement перемещения, то считают, что транспортное средство находится в состоянии движения. Во время третьего этапа сравнения S3 сравнивают скорость V транспортного средства с порогом остановки Varrêt. Если скорость V транспортного средства ниже порога остановки Varrêt, то осуществляют четвертый этап S1, в противном случае опять осуществляют третий этап S3 сравнения. Во время четвертого этапа S4 в течение времени остановки Δtarrêt активируют командный сигнал Antibruit передачи. Затем в конце этого времени остановки Δtarrêt опять осуществляют этап инициализации S1.
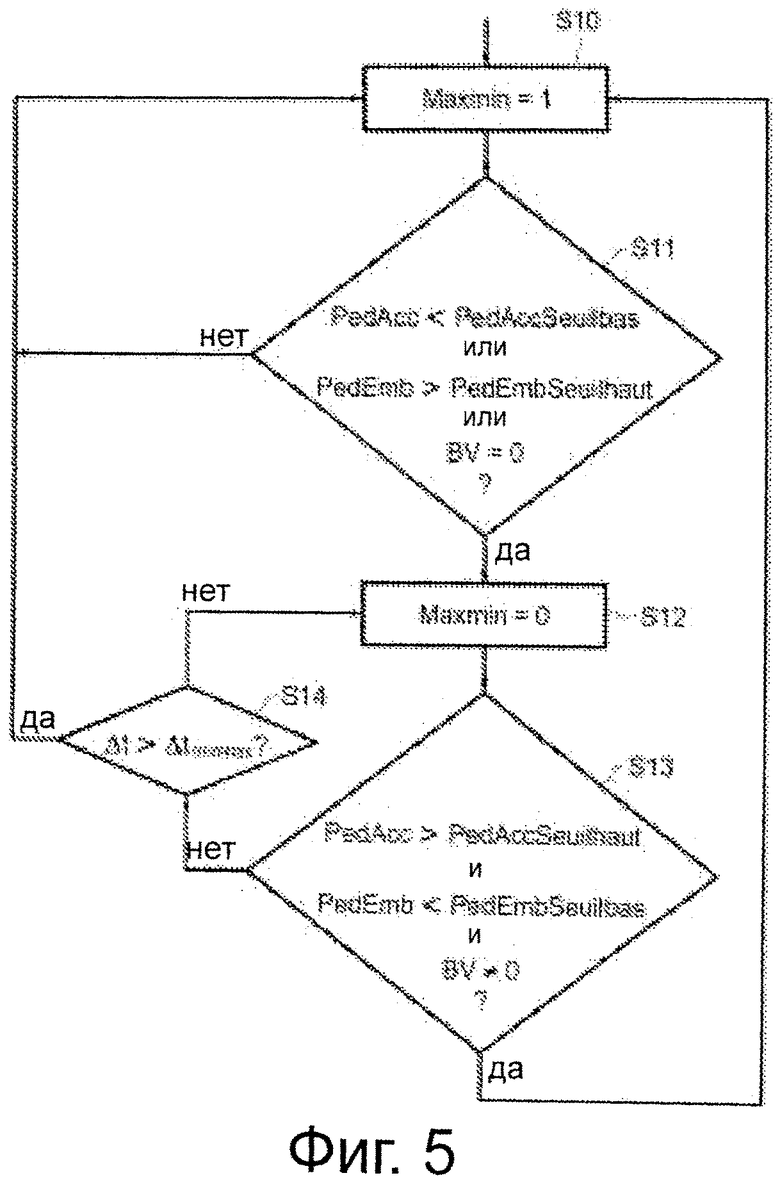
На фиг.5 схематично показан вариант применения алгоритма активации/деактивации командного сигнала Maxmin выбора. Этот алгоритм активации/деактивации можно применять в описанном выше средстве 44 управления выбором.
Этот алгоритм активации/деактивации содержит первый этап инициализации S10, на котором активируют командный сигнал Maxmin выбора. Затем осуществляют второй этап S11 сравнения, на котором проверяют подтверждение трех следующих условий:
- положение PedAcc акселератора ниже нижнего порога PedAccSeuilbas;
- положение педали PedEmb сцепления выше верхнего порога PedEmbSeuilhaut;
- никакая передача не включена, то есть BV=0.
Если одно из трех условий подтверждается, осуществляют этап S12 деактивации, в противном случае опять осуществляют первый этап инициализации S10.
На этапе деактивации S12 деактивируют командный сигнал Maxmin выбора. Затем осуществляют другой этап сравнения S13, на котором проверяют подтверждение трех следующих условий:
- положение PedAcc акселератора выше верхнего порога PedAccSeuilhau;
- положение педали PedEmb сцепления ниже нижнего порога PedEmbSeuilbas;
- включена передача, то есть BV отличается от 0.
Если все три предыдущих условия подтверждены, опять осуществляют первый этап инициализации S10, в противном случае осуществляют дополнительный этап сравнения S14. Во время дополнительного этапа сравнения S14 сравнивают время Δt, истекшее после конца этапа деактивации S12, с порогом времени Δtminmax. Если время Δtminmax истекло, то есть если истекшее время Δt превышает порог времени Δtminmax, то опять осуществляют первый этап инициализации S10, в противном случае опять осуществляют этап деактивации S12.
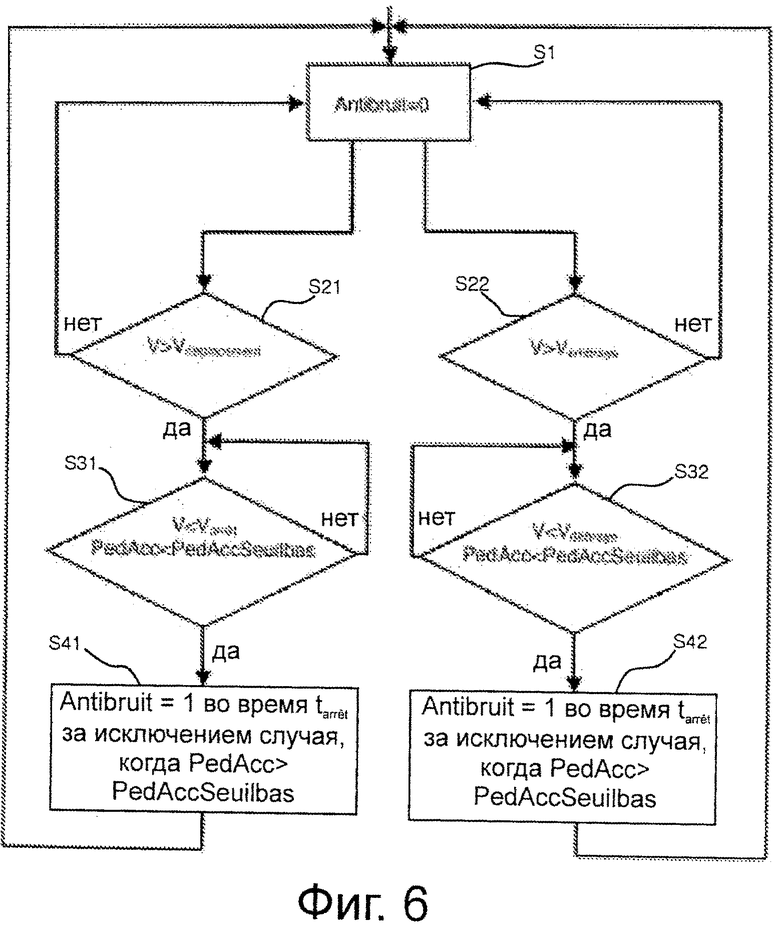
Согласно версии, показанной на фиг.6, можно уточнить алгоритм Antibruit, чтобы лучше идентифицировать ситуации, в которых ее следует применять. Действительно, как показывает опыт, во время маневров изменения направления движения на противоположное некоторые водители не дожидаются остановки транспортного средства, чтобы перейти от первой передней передачи к задней передаче и наоборот.
В этом случае алгоритм Antibruit, показанный на фиг.4, не является оптимальным, так как он исключает передачу момента во время маневра, тогда как водитель ожидает от транспортного средства хорошей реакции во время трогания с места.
Согласно версии, показанной на фиг.6, алгоритм активации/деактивации сигнала Antibruit передачи содержит две параллельные ветви, одна из которых использует вышеупомянутые пороги скорости Vdéplacement и Varrêt, а другая - немного более высокие пороги: порог Vembrayage включения сцепления, превышающий Vdéplacement перемещения, и порог Vdébrayage выключения сцепления, превышающий порог Varrêt.
На первом этапе S1 командный сигнал Antibruit передачи устремляют к нулю. Затем осуществляют второй этап S21, на котором текущую скорость V транспортного средства сравнивают с порогом скорости Vdéplacement перемещения транспортного средства. Если скорость V транспортного средства превышает порог скорости Vdéplacement перемещения, осуществляют третий этап S31 сравнения, а в противном случае опять осуществляют первый этап S1. Когда скорость V транспортного средства превышает порог скорости Vdéplacement перемещения, то считают, что транспортное средство находится в состоянии движения. Во время третьего этапа сравнения S31 сравнивают скорость V транспортного средства с порогом остановки Varrêt и положение педали акселератора с порогом PedAccSeuilbas. Если скорость V транспортного средства ниже порога остановки Varrêt и если положение педали акселератора находится ниже порога PedAccSeulbas, то осуществляют четвертый этап S41, а в противном случае опять осуществляют третий этап S31 сравнения. Во время четвертого этапа S41 в течение времени остановки Δtarrêt активируют командный сигнал Antibruit передачи. Затем в конце этого времени остановки Δtarrêt опять осуществляют первый этап инициализации S1. Вместе с тем, нажимают на педаль акселератора, чтобы сразу перейти к Antibruit=0, не дожидаясь истечения Δtarrêt.
Параллельно этот же алгоритм осуществляют на этапах S22, S32 и S42 для порогов Vembrayage включения сцепления и Vdébrayage выключения сцепления. Это дублирование позволяет охватить гораздо большее число практических ситуаций маневра.
Так, командный сигнал Antibruit передачи передается, только если водитель замедляет транспортное средство без привлечения мощности. После этого, как было указано выше, средство 45 управления передачей выдает командный сигнал Antibruit передачи в направлении средства 43 передачи через линию 50. Средство 43 передачи выбирает значение, полученное через линию 49 от средства 42 выбора, когда командный сигнал Antibruit передачи деактивирован, и выбирает нулевое значение, выработанное средством 51, когда командный сигнал Antibruit передачи активирован, чтобы на короткое время прекратить передачу момента на задний мост.
В случае, когда водитель не нажимает на педаль акселератора во время маневра изменения направления движения на противоположное, этот алгоритм позволяет разгрузить кинематическую цепь трансмиссии, когда крутящий момент меняет направление, чтобы увеличить срок службы трансмиссии и устранить шум во время этого маневра. Однако она отдает предпочтение сцеплению с дорогой и эффективности трогания с места в ситуациях, когда водитель нажимает на акселератор, хотя транспортное средство замедляет ход и движется на малой скорости.
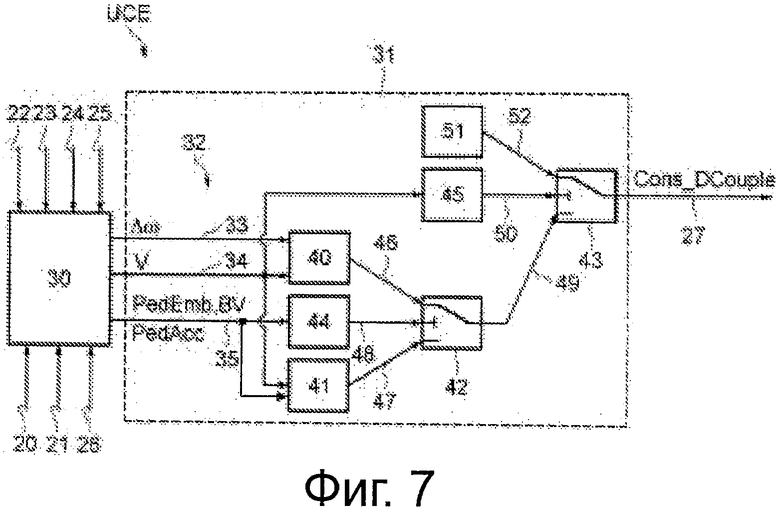
На фиг.7 представлена версия выполнения средств 31 формирования, которая отличается от фиг.2 тем, что вторичные средства 41 определения второго значения Cmin заданной величины учитывают не только скорость V транспортного средства, но также включенную передачу BV. В данном случае ставится задача лучше идентифицировать в условиях плохой проходимости ситуации, требующие применения постоянного значения Cmin.
Можно идентифицировать три различных алгоритма выработки второго значения Cmin:
- когда включенной передачей является первая передняя передача или задняя передача и транспортное средство движется на низкой скорости, то есть когда скорость транспортного средства ниже минимального порога, второе значение Cmin является постоянным значением и равно минимальному постоянному значению, которое представляет собой компромисс между эффективностью преодоления препятствий и снижением расхода топлива, а также возможность распределить момент на четыре колеса на спуске, не нажимая на педаль акселератора, чтобы добиться оптимального режима привода. Минимальный порог скорости и минимальное постоянное значение можно регулировать во время отладки и сохранить в энергонезависимой памяти транспортного средства. Преимуществом этого алгоритма является ее простота и, следовательно, ее надежность;
- когда включенной передачей коробки передач является вторая передача или высшая передача и когда транспортное средство движется на низкой или средней скорости, то есть ниже максимального порога, который может быть равен или превышать минимальный порог, второе значение Cmin является функцией скорости V транспортного средства. Эта функция является убывающей между минимальным постоянным значением и нулем. Таким образом, обеспечивается эффективность преодоления препятствий, и расход топлива уменьшается по сравнению с алгоритмом на низкой скорости. Максимальный порог скорости тоже можно регулировать во время отладки и сохранить в энергонезависимой памяти;
- когда транспортное средство движется на высокой скорости, то есть когда скорость V транспортного средства превышает максимальный порог, второе значение Cmin является нулевым. При этом расход топлива является минимальным.
После того второе значение Cmin заданной величины команды Cons_DCouple распределения момента используют так же, как и в первом примере выполнения изобретения.
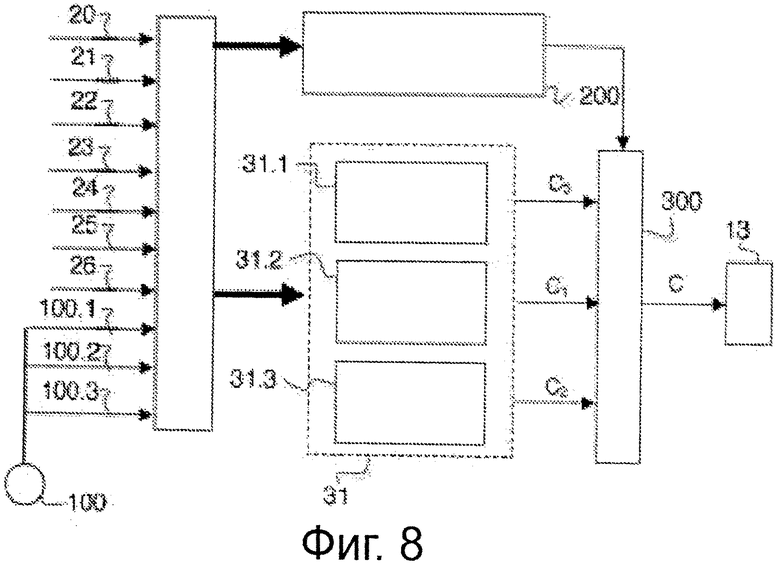
Представленное выше описание относится к вождению транспортного средства в режиме плохой проходимости. Этот режим может быть единственно предложенным на транспортном средстве. Он может быть также одним из нескольких режимов, которые могут быть выбраны водителем. Согласно версии, представленной на фиг.8, устройство распределения крутящего момента между передним мостом и задним мостом содержит ручной переключатель 100, который позволяет водителю выбрать режим с двумя ведущими колесами, дорожный режим и режим плохой проходимости. При такой конфигурации электронный блок управления выполнен с возможностью приема одного или нескольких сигналов, характеризующих состояние переключателя, через линию 101, в дополнение к элементам, уже упомянутым в первом варианте выполнения, то есть таким как положение педали акселератора 11, поступающее от датчика 18 положения через линию 20, положение педали сцепления 12, поступающее от датчика 19 положения через линию 21, значения скорости колес 3, 4, 6 и 7, поступающие соответственно от датчиков скорости 14-17 и передаваемые соответственно через линии 22-25, и информация о включенной передаче от коробки передач 10 через линию 26.
Как и в предыдущем примере, блок ЭБУ содержит средства 30 вычисления, предназначенные для вычисления различных данных на основании информации, полученной от элементов автотранспортного средства, и для передачи вычисленных данных через проводную сеть 32 в средства 310 формирования, содержащие средства 31 формирования команды в режиме плохой проходимости, средства 31А формирования в дорожном режиме и средства 31В формирования команды в режиме с двумя ведущими колесами.
Средства 31 формирования команды в режиме плохой проходимости идентичны средствам формирования, показанным на фиг.2 и 3 и описанным в связи с первым примером выполнения изобретения.
Средства 31А формирования команды в дорожном режиме в основном учитывают скорость V транспортного средства и рассогласование скоростей Δω между передним мостом и задним мостом. Они могут также учитывать температуру 9 привода, которую можно измерять при помощи температурного датчика или оценивать на основании хронологии изменения рассогласования скоростей Δω, как описано, например, в документе WO 2010/007271. Средства 31А формирования могут быть также оснащены специальными средствами для оптимизации команды при трогании с места, как описано, например, в документе WO 2009/095627. Средства 31А формирования могут быть также оснащены специальными средствами для оптимизации команды на виражах или в ситуациях торможения, как описано, например, в документе WO 2007/138221.
Что касается средств 31В формирования, то они выдают заданную величину команды, равную нулю.
Блок ЭБУ дополнительно содержит блок 200, предназначенный для идентификации намерения водителя и для выбора режима работы системы. Этот блок считывает положение ручного переключателя 100, вычисленное вычислительным устройством 30, а также, в случае необходимости, скорость транспортного средства для выдачи сигнала выбора режима работы через линию 201 в блок 300, предназначенный для формирования команды сглаженной непрерывной передачи момента. Блок формирования команды передачи момента принимает значения заданных величин, выработанных в средствах формирования 31, 31А и 31В, и выдает заданную величину момента, которая передается на привод 13. В данном случае выдаваемая заданная величина момента является одним из трех значений заданной величины, соответствующих выбору режима работы, сделанному блоком 200. В переходный период между двумя режимами работы заданная величина момента сглаживается, чтобы не создавать разрыва, если искомое значение заданной величины средства формирования отличается от исходного значения, вычисленного средством формирования.
Естественно, изобретение не ограничивается только транспортными средствами с четырьмя ведущими колесами. Наоборот, его можно применять для любого транспортного средства с несколькими ведущими мостами, при этом каждый мост может иметь любое число колес, предпочтительно превышающее или равное двум.
Наконец, можно комбинировать технические характеристики различных вариантов выполнения для реализации других версий.
Изобретение относится к устройству распределения крутящего момента. Устройство (1) распределения содержит управляемый привод (13), средства (30) вычисления скорости транспортного средства и разности скорости между передним мостом (2) и задним мостом (5) и средства (31) формирования команды распределения момента. Средства (31) формирования содержат исходное средство (40) определения, предназначенное для определения первого значения заданной величины распределения момента, равного либо максимальному постоянному значению, если скорость транспортного средства ниже нижнего порога, либо функции скорости транспортного средства и разности скорости, если скорость транспортного средства находится в пределах между нижним порогом и верхним порогом, либо нулю, если скорость транспортного средства превышает верхний порог. Достигается повышение надежности устройства. 2 н. и 12 з.п. ф-лы, 8 ил.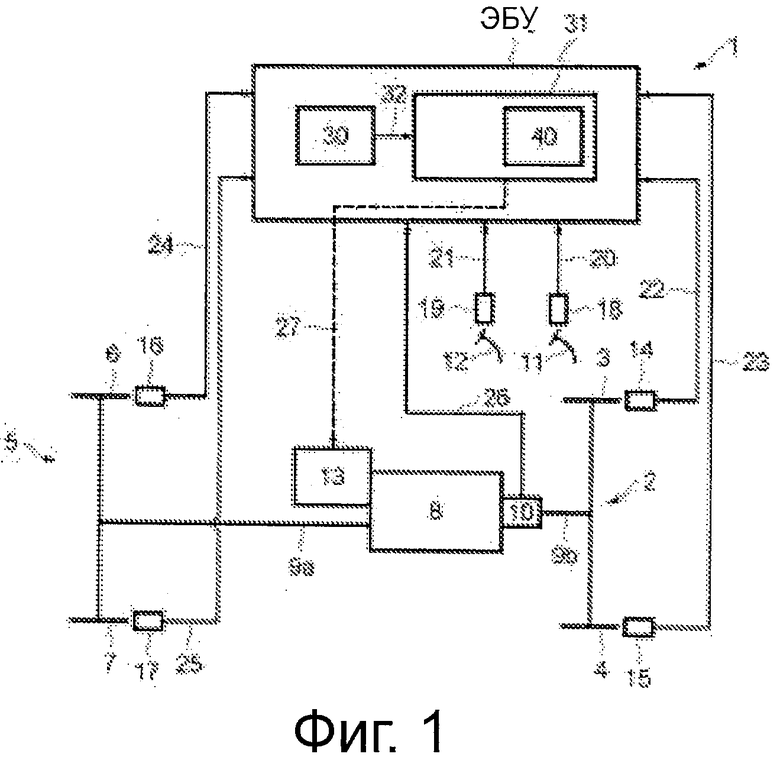
1. Устройство (1) распределения крутящего момента между передним мостом (2) и задним мостом (3) автотранспортного средства, по меньшей мере, с четырьмя ведущими колесами (3, 4, 6, 7), содержащее управляемый привод (13), выполненный с возможностью распределения крутящего момента, и средства (30) вычисления скорости транспортного средства и разности скорости между передним мостом (2) и задним мостом (5), отличающееся тем, что содержит средства (31) формирования команды распределения момента, предназначенной для привода (13), при этом средства (31) формирования содержат исходное средство (40) определения, предназначенное для определения первого значения заданной величины распределения момента, равного либо максимальному постоянному значению, если скорость транспортного средства ниже нижнего порога, либо функции скорости транспортного средства и разности скорости, если скорость транспортного средства находится в пределах между нижним порогом и верхним порогом, либо нулю, если скорость транспортного средства превышает верхний порог.
2. Устройство по п.1, в котором исходное средство (40) определения выполнено с возможностью определения первого значения заданной величины распределения момента, находящегося в интервале, границы которого меняются в зависимости от скорости транспортного средства, при этом границы отличаются друг от друга, когда скорость транспортного средства находится в пределах между нижним порогом и верхним порогом.
3. Устройство по п.2, в котором исходное (40) средство определения выполнено с возможностью определения промежуточного порога скорости, находящегося между нижним порогом и верхним порогом, при этом нижняя граница интервала является нулевой, когда скорость транспортного средства находится в пределах между промежуточным порогом скорости и верхним порогом.
4. Устройство по п.1, в котором средства (31) формирования содержат вторичное средство (41) определения, предназначенное для определения второго значения заданной величины распределения момента, меньшего, чем первое значение, и равного либо минимальному постоянному значению, если скорость транспортного средства ниже минимального порога, либо только функции скорости транспортного средства, если скорость транспортного средства находится между минимальным порогом и максимальным порогом, либо нулю, если скорость транспортного средства превышает максимальный порог, и средство (42) выбора, предназначенное для выбора первого или второго значения для формирования команды распределения момента.
5. Устройство по п.1, в котором средства (30) вычисления выполнены с возможностью вычисления включенной передачи, при этом средства (31) формирования содержат вторичное средство (41) определения, предназначенное для определения второго значения заданной величины распределения момента, меньшего, чем первое значение, и равного либо минимальному постоянному значению, если скорость транспортного средства ниже минимального порога, тогда как включенной передачей является первая передняя передача или задняя передача, либо нулю, если скорость транспортного средства превышает минимальный порог или включенная передача отличается от первой передней передачи и от задней передачи, и средство (42) выбора, предназначенное для выбора первого или второго значения для формирования команды распределения момента.
6. Устройство по п.4, в котором средства (30) вычисления выполнены с возможностью вычисления положения педали акселератора и включенной передачи и средства (31) формирования содержат средство (44) управления выбором, выполненное с возможностью активации командного сигнала выбора, если положение педали акселератора выше верхнего порога ускорения и если включенная передача не является нулевой, при этом средство (42) выбора выполнено с возможностью приема командного сигнала выбора и с возможностью выбора первого значения, если командный сигнал выбора активирован, или второго значения, если командный сигнал выбора деактивирован.
7. Устройство по п.4, в котором средства (31) формирования содержат средство (43) передачи, предназначенное для передачи значения, выбранного средством (42) выбора, или нулевого значения с целью формирования команды распределения момента, и средство (45) управления передачей, выполненное с возможностью активации командного сигнала передачи во время остановки, если скорость транспортного средства ниже порога остановки, при этом средство (43) передачи выполнено с возможностью приема командного сигнала передачи и с возможностью передачи значения, выбранного средством (42) выбора, если командный сигнал передачи деактивирован, или нулевого значения, если командный сигнал передачи активирован.
8. Устройство по п.4, в котором средства (30) вычисления выполнены с возможностью вычисления положения педали акселератора, при этом средства (31) формирования содержат средство (43) передачи, предназначенное для передачи значения, выбранного средством (42) выбора, или нулевого значения с целью формирования команды распределения момента, и средство (45) управления передачей, выполненное с возможностью активации командного сигнала передачи во время остановки, если скорость транспортного средства понижается ниже порога остановки, тогда как педаль акселератора не нажата, при этом средство (43) передачи выполнено с возможностью приема командного сигнала передачи и с возможностью передачи значения, выбранного средством (42) выбора, если командный сигнал передачи деактивирован, или нулевого значения, если командный сигнал передачи активирован.
9. Способ распределения крутящего момента между передним мостом (2) и задним мостом (5) автотранспортного средства, по меньшей мере, с четырьмя ведущими колесами (3, 4, 6, 7), в котором вычисляют скорость транспортного средства и рассогласование скоростей переднего моста (2) и заднего моста (5), отличающийся тем, что определяют первое значение заданной величины распределения момента, равное либо максимальному постоянному значению, если скорость транспортного средства ниже нижнего порога, либо функции скорости транспортного средства и рассогласования скоростей, если скорость транспортного средства находится в пределах между нижним порогом и верхним порогом, либо нулю, если скорость транспортного средства превышает верхний порог, и крутящий момент распределяют на основании определенной заданной величины распределения момента.
10. Способ по п.9, в котором во время этапа определения дополнительно определяют первое значение заданной величины распределения момента, включенное в интервал, границы которого меняются в зависимости от скорости транспортного средства, при этом границы отличаются друг от друга, когда скорость транспортного средства находится в пределах между нижним порогом и верхним порогом.
11. Способ по п.10, в котором во время этапа определения определяют промежуточный порог скорости, находящийся между нижним порогом и верхним порогом, при этом нижняя граница интервала является нулевой, когда скорость транспортного средства находится в пределах между промежуточным порогом скорости и верхним порогом.
12. Способ по п.9, в котором определяют второе значение заданной величины распределения момента, меньшее, чем первое значение, и равное либо минимальному постоянному значению, если скорость транспортного средства ниже минимального порога, либо только функции скорости транспортного средства, если скорость транспортного средства находится между минимальным порогом и максимальным порогом, либо нулю, если скорость транспортного средства превышает максимальный порог, и выбирают первое или второе значение для определения заданной величины распределения момента.
13. Способ по п.12, в котором вычисляют положение педали акселератора и включенную передачу, активируют (S10) командный сигнал выбора, если положение педали акселератора выше порога ускорения и если включенная передача не является нулевой, и выбирают первое значение, если командный сигнал выбора активирован, или второе значение, если командный сигнал выбора деактивирован.
14. Способ по п.12, в котором активируют (S4) командный сигнал передачи, если скорость транспортного средства ниже порога остановки во время остановки, и передают первое или второе выбранное значение, если командный сигнал передачи деактивирован, или нулевое значение, если командный сигнал передачи активирован, для определения заданной величины команды распределения момента.
| US 5752211 A, 12.05.1998 | |||
| US 5270930 A, 14.12.1993 | |||
| WO 2005009772 A1, 03.02.2005 | |||
| СИСТЕМА АВТОМАТИЧЕСКОЙ БЛОКИРОВКИ МЕЖОСЕВОГО ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2200888C2 |

