Изобретение относится к транспортному машиностроению и может быть использовано для управления системами распределения крутящих моментов, подводимых к колесам полноприводных автомобилей.
Известны полноприводные автомобили, например, шасси МА3-7909 4-осное, у которого крутящие моменты от двигателя распределены поровну на каждую из осей [1]. Однако такое распределение не обеспечивает оптимального подвода мощности к колесам из условия наименьших затрат мощности на движение или из условий высокой проходимости.
Известен способ распределения крутящих моментов, подводимых к колесам полноприводного автомобиля с алгоритмом управления, учитывающим величины проскальзывания и скорость вращения каждого из четырех колес автомобиля с колесной формулой 4×4, предусматривающим корректировку величины передаваемого на каждое колесо мощности, корректировку направления движения автомобиля и режимов работы двигателя [2]. В данном техническом решении общий алгоритм системы управления содержит подсистемы, учитывающие режимы проскальзывания колес, режимы работы двигателя и величину «рыскания» автомобиля от заданного направления движения. Однако оно не решает задачи оптимизации распределения крутящих моментов по колесам при движении автомобиля по деформируемой опорной поверхности, по бездорожью, болотистой местности, по гололеду, мокрой дороге, на режимах разгона и торможения.
Известен способ распределения крутящих моментов, подводимых к колесам полноприводного автомобиля при движении по твердой и деформируемой опорным поверхностям, содержащего систему управления, включающую блок приема сигналов с датчиков, блок обработки сигналов, блок формирования сигналов управления и исполнительный механизм распределения крутящих моментов по колесам, в которой блок приема передает информацию в блок обработки, из последнего обработанную информацию передают в блок формирования сигналов, а из последнего управляющие сигналы подают на исполнительный механизм, в которой датчики измеряют скорость движения автомобиля (Va), крутящие моменты на колесах (Мкi), нагрузки под колесами (ωкi), угловые скорости вращения колес (ωкi), реализующий распределение мощностей по взаимному отклонению кинематических и силовых факторов [3], принятый за прототип настоящего изобретения. Реализация данного способа позволяет повысить эффективность работы системы распределения мощностей между ведущими колесами, поскольку их работа в большей мере определяется оценкой конкретных дорожных условий. Однако данный способ распределения крутящих моментов, подводимых к колесам автомобиля, мало учитывает характер взаимодействия всех колес автомобиля с опорной поверхностью и не обеспечивает в полной мере сцепления колес с опорной поверхностью при движении по деформируемым грунтам.
Изобретение направлено на снижение затрат мощности, на движение и повышение проходимости полноприводных автомобилей путем оптимизации крутящих моментов, подводимых к колесам при движении по твердой и деформируемой опорной поверхностям.
Указанный технический результат достигается тем, что у полноприводного автомобиля, содержащего систему управления, включающую блок приема сигналов с датчиков, блок обработки сигналов, блок формирования сигналов управления и исполнительный механизм распределения крутящих моментов по колесам, в которой блок приема передает информацию в блок обработки, из последнего обработанную информацию передают в блок формирования сигналов, а из последнего управляющие сигналы подают на исполнительный механизм, в которой датчики измеряют скорость движения автомобиля (Va), крутящие моменты на колесах (Mкi), нагрузки под колесами (Gкi), угловые скорости вращения колес (ωкi), заключающийся в том, что с помощью датчиков дополнительно измеряют давление воздуха в шинах (Pвi) и глубину изменения колеи под каждым колесом (Hклi) при движении автомобиля, результаты измерения всех датчиков подают из блока приема в блок обработки, в котором производят расчет суммарного крутящего момента (Ma), подводимого ко всем колесам (i) автомобиля по формуле 
- при условии 
- при условии 



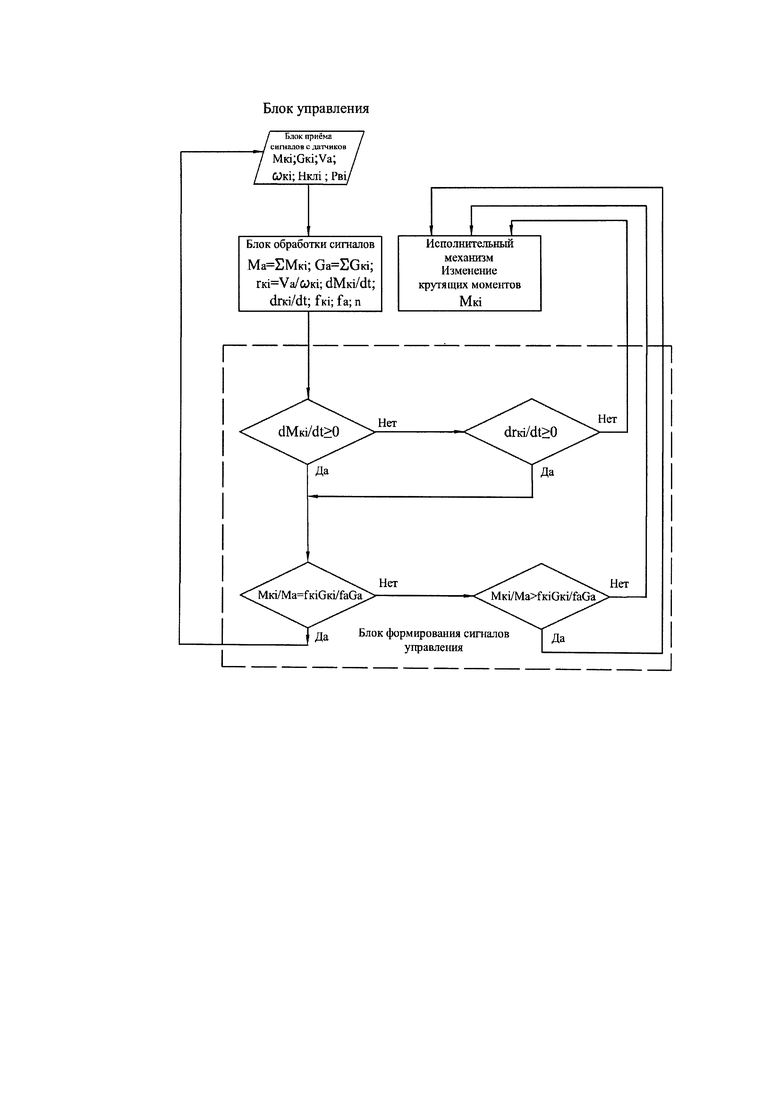
На фигуре представлен алгоритм, реализующий предлагаемый способ распределения крутящих моментов, подводимых к колесам полноприводного автомобиля при движении по твердой и деформируемой опорным поверхностям.
Реализация способа осуществляется следующим образом.
При движении полноприводного автомобиля по твердой опорной поверхности с помощью датчиков непрерывно контролируется его скорость движения, крутящие моменты на колесах, нагрузки под колесами, угловые скорости вращения колес, давление воздуха в шинах, которые блок приема сигналов с датчиков подает в блок обработки информации.
Блок обработки сигналов рассчитывает:
Последний проводит проверку сцепных свойств (что важно при движении по скользкой твердой опорной поверхности), которая осуществляется по изменению крутящих моментов во времени. Если 
Если
Если 
Если началось буксование колес одной оси одновременно, то блок формирования сигналов управления подает управляющий сигнал на исполнительный механизм, который перераспределяет крутящие моменты по осям (больше на оси с высокими сцепными свойствами) или снижает мощность двигателя (уменьшив подачу топлива).
Далее блок формирования сигналов управления проверяет отношение:
Если равенство соблюдается (с допуском ±3%), то трансмиссия обеспечивает движение с затратами мощности, близкими к минимальным для автомобиля. Если не соблюдается, то блок подает сигнал на исполнительный механизм на изменение крутящих моментов в нужную сторону.
При движении автомобиля по сухой твердой опорной поверхности функцию проверки сцепных свойств можно отключить.
Реализация данного алгоритма возможна при использовании бесступенчатых электрических или гидрообъемных трансмиссий с обеспечением индивидуального подвода мощности к каждому колесу полноприводного автомобиля.
Алгоритм распределения крутящих моментов, подводимых к колесам полноприводного автомобиля при движении по твердой опорной поверхности, применим и для алгоритма управления, реализующего минимизацию затрат мощности автомобиля при движении по деформируемым грунтам.
При движении полноприводного автомобиля по деформируемым грунтам из условия обеспечения минимальных затрат мощности на движение непрерывно контролируется те же параметры, что и при движении по твердой опорной поверхности: скорость движения Va, крутящие моменты на колесах Mкi нагрузки под колесами Gкi, угловые скорости вращения колес ωкi, давление воздуха в шинах Pв. Дополнительно к этим параметрам с помощью датчиков контролируется глубина изменения колеи под каждым колесом Нш1.
Глубина колеи измеряется датчиками расстояния, связанным кронштейнами со ступицами колес. На каждое колесо требуется два датчика - перед колесом и после колеса. Датчик между колесами работает на оба колеса. Для автомобиля типа 8×8 их количество равно 10, для автомобиля типа 6×6 - 8, для автомобиля типа 4×4 - 6. Для большинства условий движения достаточно датчиков, установленных по борту автомобиля, то есть в два раза меньше.
Алгоритм распределения крутящих моментов, подводимых к колесам полноприводного автомобиля при движении по деформируемой поверхности, как отмечено выше, аналогичен алгоритму при движении по твердой опорной поверхности. Если 
В случае, если 

Далее блок формирования сигналов управления проверяет соотношение (1). Если равенство соблюдается с допуском ±3%, то система обеспечивает движение полноприводного автомобиля по деформируемым грунтам с затратами мощности, близким к минимальным. Отклонение от этого соотношения в ту или иную сторону приводит к подаче сигнала на исполнительный механизм для изменения крутящих моментов и восстановления требуемого соотношения.
Экспериментальные исследования показали, что при появлении силы тяги на крюке или силы аэродинамического сопротивления отношения крутящего момента на колесе к общему крутящему моменту на всех колесах автомобиля по прежнему должны соответствовать отношению сил сопротивления движению колеса и всего автомобиля для обеспечения минимальных затрат мощности на движение. Этот режим можно назвать «ведущим оптимальным». Но следует учитывать, что увеличение крутящих моментов и появление горизонтальных сил приведет к перераспределению нормальных реакций под колесами в сторону их увеличения под задними, что зафиксируется датчиками.
Практическая реализация данного способа распределения крутящих моментов, подводимых к колесам полноприводного автомобиля при движении по твердой и деформируемой опорным поверхностям, позволяет минимизировать их затраты мощности при движении в различных условиях эксплуатации и обеспечить высокую проходимость.
Источники информации
1. Тенденции развития специальных колесных шасси и тягачей военного назначения. Информационно-технический сборник. Под редакцией В.А.Полонского. Бронницы. - 2007. - 417 с., стр. 35.
2. Патент США №7624832 В2, кл. 180/233 (МПК B60K 17/34), опубл. 01.12.2009 г.
3. Келлер А.В. Принципы и методы распределения мощностей между ведущими колесами автомобильных базовых шасси / А.В. Келлер., И.А. Мурог. - Челябинск: 4 ВВАКИУ, 2009. - 218 с., рис. 2.20, стр. 91.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ МНОГОКОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2483950C2 |
| СПОСОБ УПРАВЛЕНИЯ АНТИБЛОКИРОВОЧНОЙ И ПРОТИВОБУКСОВОЧНОЙ СИСТЕМОЙ (АБС/ПБС) ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2324611C2 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОПРИВОДНОЙ ЭЛЕКТРИЧЕСКОЙ ТРАНСМИССИЕЙ МНОГООСНОЙ КОЛЕСНОЙ МАШИНЫ | 2009 |
|
RU2426660C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЛНОПРИВОДНЫХ КОЛЕСНЫХ МАШИН | 2000 |
|
RU2187436C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОБУКСОВКОЙ ВЕДУЩИХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ БЛОКИРОВАНИЯ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2307035C2 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| Плавающий снегоболотоход на шинах сверхнизкого давления с колесной формулой 8х8 с гидростатической трансмиссией и возможностью автоматического управления крутящими моментами каждого из колес | 2016 |
|
RU2652300C1 |
| Устройство распределения мощности в трансмиссии | 2022 |
|
RU2785241C1 |
| Аппарат на воздушной подушке с наземным движителем | 2015 |
|
RU2614459C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ МОБИЛЬНЫХ МАШИН | 1997 |
|
RU2125517C1 |
Изобретение относится к транспортному машиностроению. В способе распределения крутящих моментов, подводимых к колесам полноприводного автомобиля при движении по твердой и деформируемой опорным поверхностям, измеряют скорость движения автомобиля, крутящие моменты на колесах, нагрузки под колесами и угловые скорости вращения колес. Дополнительно измеряют давление воздуха в шинах и глубину изменения колеи под каждым колесом при движении автомобиля. Результаты измерений подают в блок обработки, в котором производят расчет: суммарного крутящего момента, подводимого ко всем колесам автомобиля; силы тяжести автомобиля; радиуса качения i-го колеса; изменения крутящего момента во времени и изменения радиуса качения колес во времени; коэффициента сопротивления качению колеса, а также коэффициента сопротивления качению автомобиля. Перечисленные данные передают в блок формирования сигналов управления. Снижаются затраты мощности и повышается проходимость автомобиля. 1 ил.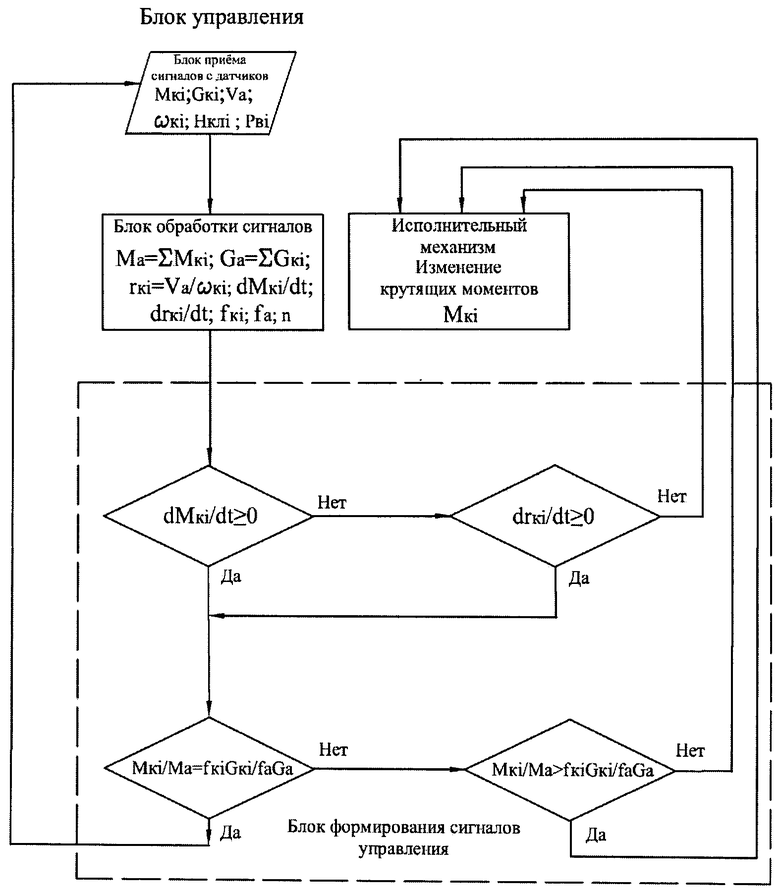
Способ распределения крутящих моментов, подводимых к колесам полноприводного автомобиля при движении по твердой и деформируемой опорным поверхностям, содержащего систему управления, включающую блок приема сигналов с датчиков, блок обработки сигналов, блок формирования сигналов управления и исполнительный механизм распределения крутящих моментов по колесам, в которой блок приема передает информацию в блок обработки, из последнего обработанную информацию передают в блок формирования сигналов, а из последнего управляющие сигналы подают на исполнительный механизм, в которой датчики измеряют скорость движения автомобиля (Va), крутящие моменты на колесах (Мкi), нагрузки под колесами (Gкi), угловые скорости вращения колес (ωкi), заключающийся в том, что с помощью датчиков дополнительно измеряют давление воздуха в шинах (Pвi) и глубину изменения колеи под каждым колесом Hклi при движении автомобиля, результаты измерения всех датчиков подают из блока приема в блок обработки, в котором производят расчет суммарного крутящего момента (Ма), подводимого ко всем колесам (i) автомобиля по формуле 
- при условии 
- при условии 



| А.М.САЙКИН И ДР., статья "ОБ ОПТИМИЗАЦИИ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ПО ОСЯМ И КОЛЕСАМ ПОЛНОПРИВОДНЫХ АВТОМОБИЛЕЙ В ЗАВИСИМОСТИ ОТ ДОРОЖНЫХ УСЛОВИЙ", ЖУРНАЛ АВТОМОБИЛЬНЫХ ИНЖЕНЕРОВ, No.3 (68) 2011 | |||
| С.В.УШНУРЦЕВ И ДР., статья "МЕТОД КОМБИНИРОВАННОГО УПРАВЛЕНИЯ РАСПРЕДЕЛЕНИЕМ МОЩНОСТИ МЕЖДУ ВЕДУЩИМИ КОЛЕСАМИ АВТОМОБИЛЬНОГО БАЗОВОГО ШАССИ С ПРОГНОЗИРОВАНИЕМ ВОЗМУЩЕНИЙ", ОМСКИЙ НАУЧНЫЙ ВЕСТНИК, No.3 (113) 2012 | |||
| В.Ю.УСИКОВ И ДР., статья "МЕТОД ЧАСТИЧНОГО РЕШЕНИЯ ПРИ РАСПРЕДЕЛЕНИИ МОЩНОСТИ МЕЖДУ ВЕДУЩИМИ КОЛЕСАМИ АВТОМОБИЛЬНЫХ БАЗОВЫХ ШАССИ", ОМСКИЙ НАУЧНЫЙ ВЕСТНИК, No.2 (110) 2012 | |||
| US 4987967 A, 29.01.1991 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2389625C2 |
| УПРАВЛЯЕМЫЙ МЕЖКОЛЕСНЫЙ (МЕЖОСЕВОЙ) ДИФФЕРЕНЦИАЛ | 2007 |
|
RU2376515C2 |

