Изобретение относится к области безопасности на транспортных средствах и может быть использовано в качестве системы тактильной связи с водителем транспортного средства для предупреждения водителя транспортного средства о препятствии [B60W50/16, B60W30/08, B60Q9/007, B60Q9/006].
Из уровня техники известно ВИБРАЦИОННОЕ УСТРОЙСТВО [DE102020213906A1, опубл. 05.05.2022]. Устройство с большим количеством вибраторов и блоку управления, которые, по меньшей мере, косвенно подключены к системе управления транспортным средством. Для создания устройства, которое позволяет оценивать мгновенную скорость и/или ускорение независимо от отображения скорости и которое повышает удовольствие от вождения транспортного средства, изобретение предусматривает, что вибраторы настроены на генерирование вибраций с заданной частотой и амплитудой, а блок управления определяет частоту и амплитуду колебаний. вибрации зависят от мгновенной скорости и ускорения транспортного средства, причём вибраторы расположены внутри транспортного средства таким образом, что вибрации могут восприниматься водителем.
Недостатком аналога является отсутствие информирование водителя транспортного средства о скорости транспортного средства.
Из уровня техники известно УСТРОЙСТВО И СПОСОБ ПРЕДУПРЕЖДЕНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА [WO2020104083A1, опубл. 28.05.2020]. Устройство оповещения водителя транспортного средства предполагает наличие одного или нескольких датчиков, которые могут обнаруживать объекты в окружающей среде транспортного средства. Устройство оценки состоит из датчиков обнаружения объектов, один или несколько из которых используются для создания модели окружающей среды. Исполнительный механизм обеспечивает информирование водителя о выявленных объектах в модели окружающей среды и содержит предупреждающую информацию, передаваемую водителю с помощью тактильных механизмов. Таким образом, устройство характеризуется как пространственное устройство информирования водителя о положении объекта.
Недостатком аналога является отсутствие повышения безопасности транспортного средства в виду того, что устройство оповещения водителя, выполненное в виде вибромоторов смонтировано в сиденье транспортного средства.
Наиболее близким по технической сущности является СИСТЕМА ВИБРАЦИИ СИДЕНЬЯ ТРАНСПОРТНОГО СРЕДСТВА [WO2023008893A1, опубл. 02.02.2023]. Устройство содержит вибраторы, которые смонтированы на сиденье и предназначены для передачи вибраций пассажиру во время поездки на транспортном средстве. Блок управления получает информацию о движении транспортного средства, данные о вождении и информацию об окружающей среде от поставщика информации. Затем блок управления использует эту информацию для определения режима вибрации и стратегии управления вибрацией вибраторов с учётом режима вибрации, основанного на информации о вождении и окружающей среде. Блок управления также включает в себя по меньшей мере один выбор вибраторов, требующих вибрации, последовательность вибрации, множество вибраторов, период вибрации и интенсивность вибрации каждого вибратора
Основной технической проблемой прототипа является непостоянный контакт водителя транспортного средства с устройством информирования водителя, встроенного в сиденье. В процессе парковки и в процессе рулежки в тесных местах есть большая вероятность столкновения транспортного средства с внешним объектом, в связи с чем водителю приходится постоянно менять своё местоположение, чтобы визуально определить вероятность столкновения выступающей части кузова автомобиля с препятствием. В результате такого ёрзанья на сиденье в процессе парковки водитель транспортного средства может недополучить информацию о расстоянии до препятствия, что чревато столкновением.
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом изобретения является практически полное снижение вероятности пропуска (недополучения) информации водителем транспортного средства о расстоянии до препятствия, поскольку обеспечивается постоянный полный контакт водителя транспортного средства с устройством информирования водителя в процессе парковки или в процессе рулежки в тесных местах.
Технический результат изобретения достигается за счёт того, что система информирования водителя транспортного средства о расстоянии от транспортного средства до препятствия, содержащая датчики для определения расстояния между транспортным средством и препятствием, блок управления и устройство информирования водителя, при этом датчики установлены на транспортном средстве и соединены с блоком управления, блок управления в свою очередь соединён с устройством информирования водителя, которое выполнено в виде элемента одежды, имеющего на передней и задней частях наборы вибромоторов, а блок управления выполнен с возможностью формирования управляющего сигнала для управления вибромоторами устройства информирования водителя в зависимости от измеренного расстояния между транспортным средством и препятствием.
В частности, датчики выполнены ультразвуковыми или оптическими или радарными или лидарными, и установлены в переднюю и/или заднюю часть транспортного средства.
В частности, каждый набор вибромоторов выполнен в виде матрицы вибромоторов.
В частности, блок управления выполнен с возможностью формирования управляющего сигнала для управления передней матрицей вибромоторов устройства информирования водителя в зависимости от измеренного расстояния до препятствия перед транспортным средством, а также с возможностью формирования управляющего сигнала для управления задней матрицей вибромоторов устройства информирования водителя в зависимости от измеренного расстояния от задней части транспортного средства до препятствия.
В частности, датчики установлены вдоль передней и/или задней частей транспортного средства, при этом каждому датчику соответствует один или несколько столбцов матрицы вибромоторов.
В частности, активация строк матрицы вибромоторов зависит от расстояния, измеренного каждым датчиком.
В частности, элемент одежды может быть выполнен в виде жилета или кофты, или майки, или футболки, или толстовки, или куртки, или пуловера.
Краткое описание чертежей.
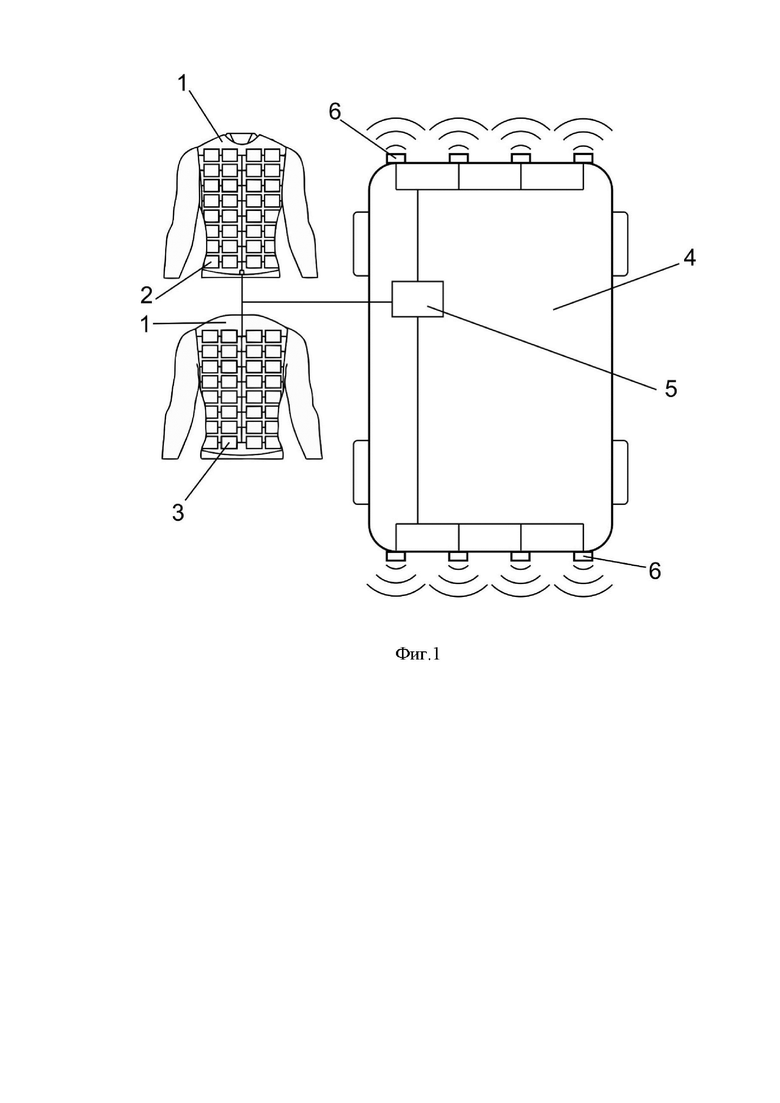
На фиг.1 схематически показаны технические средства для осуществления системы.
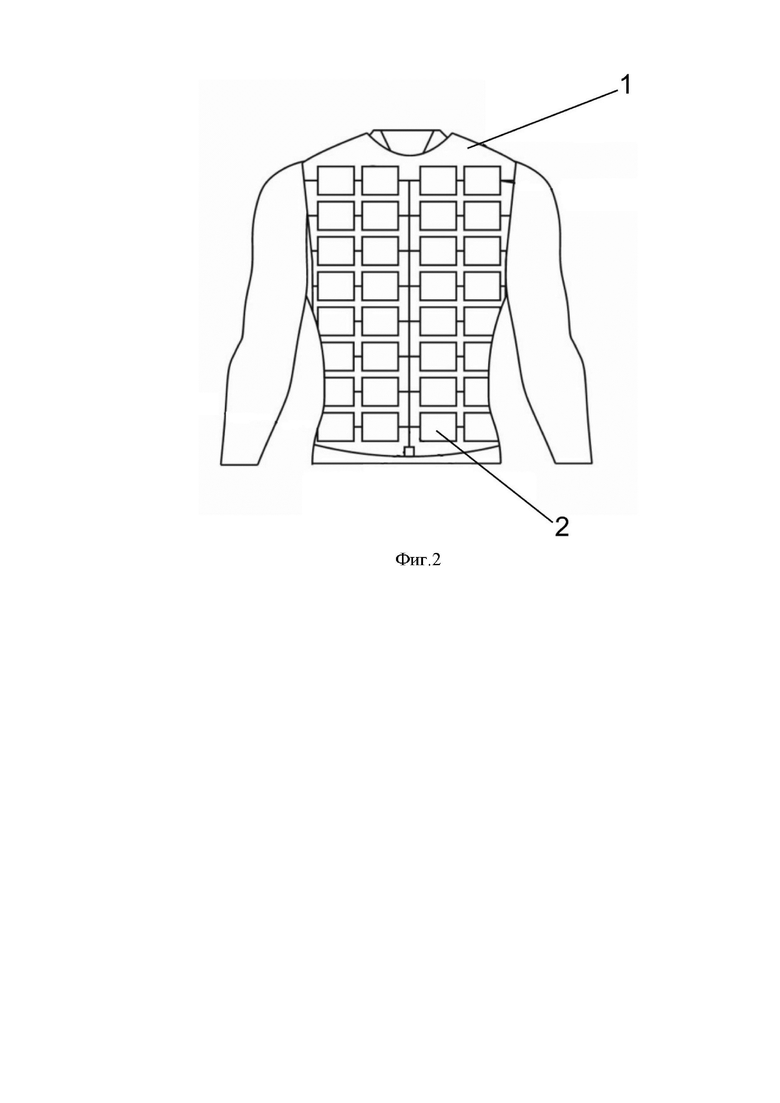
На фиг.2 показан элемент одежды спереди.
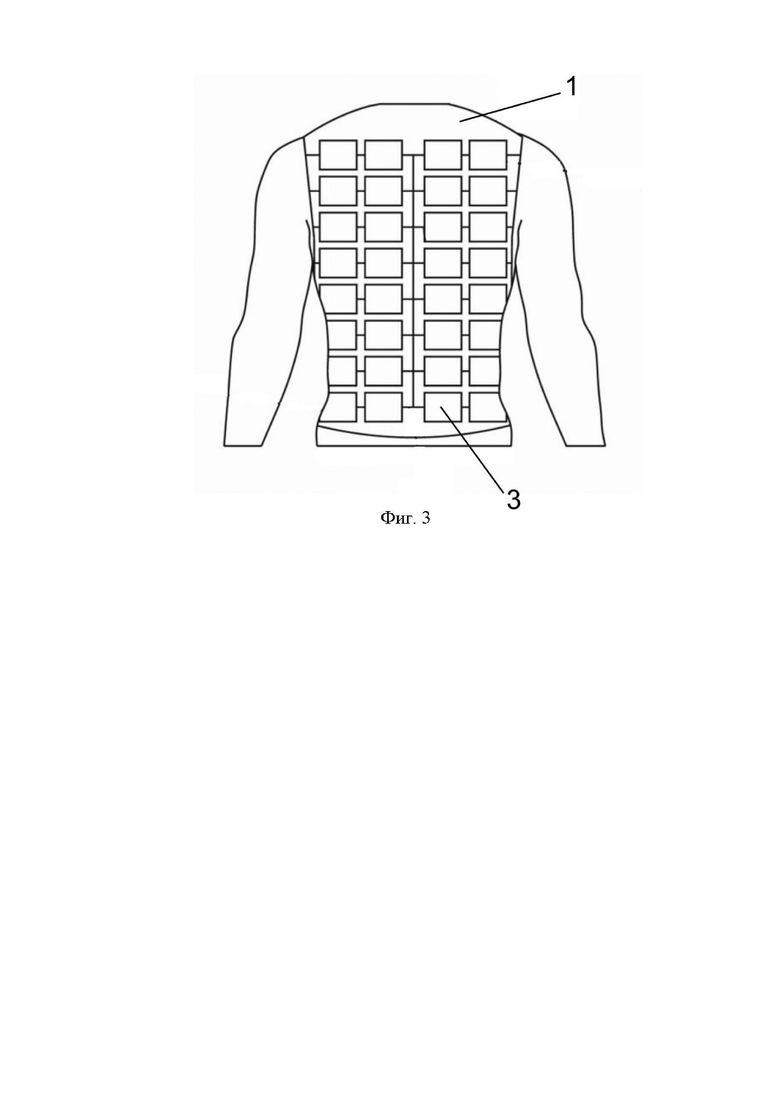
На фиг.3 показан элемент одежды сзади.
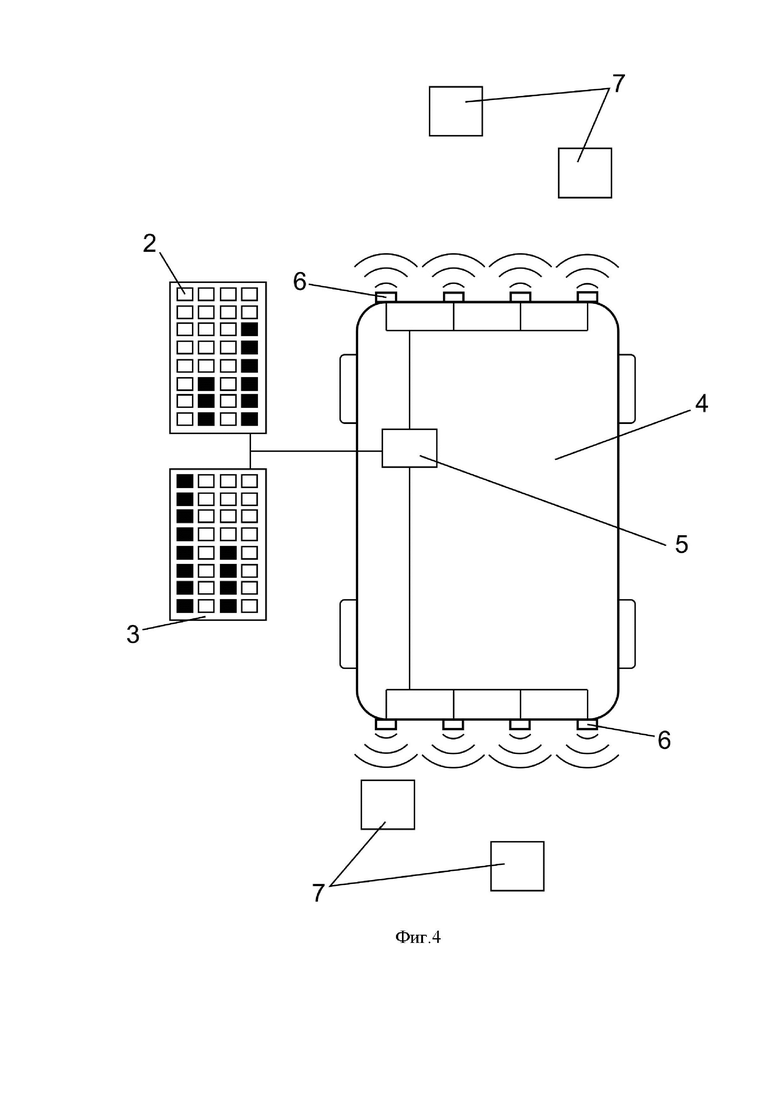
На фиг.4 показана схема осуществления системы.
На фиг.5 показана зависимость включения вибромоторов от расстояния до препятствия.
На фиг.6 показан график работы передней матрицы вибромоторов.
На фиг.7 показан график работы задней матрицы.
На фигурах обозначено: 1 – элемент одежды, 2 – передний набор вибромоторов, 3 – задний набор вибромоторов, 4 – транспортное средство, 5 – контроллер, 6 – датчик, 7 – препятствие.
Настоящая система реализуется посредством следующих технических средств.
Основой системы является устройство информирования водителя, которое выполнено в виде элемента одежды 1, на котором спереди размещён передний набор вибромоторов 2, а на задней стороне размещён задний набор вибромоторов 3.
Каждый из наборов может быть выполнен, например, в виде матрицы вибромоторов, состоящей из M строк и N столбцов. Преимущество выполнения наборов в виде матрицы вибромоторов заключается в том, что матрица позволяет осуществлять адресное управление элементами матрицы.
Элемент одежды 1 может быть выполнен в виде любого нательного элемента одежды, имеющего переднюю и заднюю части. Наборы вибромоторов 2, 3 размещаются на элементе одежды 1 таким образом, чтобы передний набор вибромоторов покрывал грудную клетку и живот водителя, а задний набор вибромоторов покрывал спину.
Информация о расстоянии от транспортного средства 4 до препятствия определяется с помощью датчиков 6. Данные датчики могут работать на любом физическом явлении. Необходимо подчеркнуть, что тип датчиков не является предметом изобретения. Из уровня техники известно большое количество различных датчиков для определения расстояния до объекта.
Датчики 6 могут быть размещены спереди транспортного средства 4, сзади транспортного средства, либо же одновременно и спереди, и сзади.
Как правило такие датчики размещается в переднем и заднем бамперах транспортного средства. Чаще всего они устанавливаются в количестве четырёх штук: 4 датчика в переднем бампере и 4 датчика в заднем бампере.
Особенность размещения датчиков 6 заключается в том, чтобы ни спереди автомобиля 4, ни сзади него не должно быть «слепых зон», то есть датчики 6 размещается равномерно вдоль передней и/или задней частей транспортного средства с небольшим перекрытием зон излучений соседних датчиков.
Информация об измеренном расстоянии от датчиков 6 передаётся на блок управления 5. Данный блок управления 5 также соединён с обоими наборами вибромоторов 2, 3 устройства информирования водителя.
Блок управления 5 может быть выполнен на базе микроконтроллера или микрокомпьютера. Ключевая особенность блока управления 5 состоит в том, что он выполнен с возможностью управления наборами вибромоторов, исходя из информации, полученной от датчиков 6.
Как уже было отмечено выше, каждый набор вибромоторов может быть выполнен в виде матрицы вибромоторов, состоящей из M строк и N столбцов. При этом ввиду того, что количество датчиков конечно и выражено натуральным числом, то каждому датчику, установленному спереди может быть сопоставлен один или несколько столбцов передней матрицы вибромоторов, а каждому датчику, установленному сзади может быть сопоставлен один или несколько столбцов задней матрицы вибромоторов.
Так, если в переднем и заднем бамперах установлено по 4 датчика, то передняя и задняя матрица вибромоторов может состоять из 4 столбцов каждая. Таким образом, каждому датчику будет соответствовать свой столбец матрицы вибромоторов.
Кроме того, блок управления 5 выполнен с возможностью не только управлять столбцами матриц, но и их строками. При этом управление строками матриц зависит от расстояния, измеренного датчиками 6, то есть чем меньше расстояние от транспортного средства до препятствия, тем большее количество строк активируется. Активация строк может происходить снизу вверх.
Система осуществляется следующим образом.
С помощью датчиков 6, установленных в бамперах транспортного средства 4, определяют расстояние от каждого датчика 6 до препятствий 7 (см. фиг.4).
Информация об измеренном каждым датчиком 6 расстоянии передаётся в блок управления 5. На основании информации, полученной от каждого датчика 6, блок управления 5 формирует управляющий сигнал (сигналы) для управления матрицами вибромоторов устройства информирования водителя.
При этом управление матрицами вибромоторов происходит в соответствии со следующей логикой.
На фиг.4 показано, что если датчик 6 не фиксирует никакого препятствия перед собой или если это препятствие далеко, то соответствующий столбец матрицы остаётся выключенным (см. например, первый передний датчик 6 и первый столбец матрицы 2, либо третий передний датчик 6 и третий столбец матрицы 2, либо второй задний датчик 6 и второй столбец матрицы 3, либо четвёртый задний датчик 6 и четвёртый столбец матрицы 3).
Если датчик 6 фиксирует наличие препятствия на некотором удалении от транспортного средства 4, то активируется соответствующий этому датчику столбец матрицы, при этом количество активных строк этого столбца будет зависеть от расстояния. Так, например, второй передний датчик 6 измерил расстояние до препятствия 7 соответствующее трем строкам второго столбца матрицы 2, а четвертый передний датчик 6 измерил расстояние до препятствия 7 соответствующее шести строкам четвертого столбца матрицы 2.
Подробно графики работ передней и задней матриц показаны на фигурах 6 и 7.
Так, на фигуре 6 показано, что поскольку первый датчик, установленный в переднем бампере, не зафиксировал никакого препятствия, то столбец 1 передней матрицы вибромоторов остался неактивным. Второй датчик переднего бампера зафиксировал препятствие на расстоянии 0,9 метра перед ним, тогда в соответствии с этим расстоянием блок управления активировал 3 вибромотора во втором столбце передней матрицы. Третий датчик переднего бампера также как и первый датчик не зафиксировал никакого препятствия перед ним, и в соответствии с этим вибромоторы третьего столбца передней матрицы остались в выключенном состоянии. Четвёртый датчик переднего бампера зафиксировал перед собой препятствие на расстоянии примерно 0,4 метра, что вызвало включение шести вибромоторов передней матрицы.
Важно отметить, что зависимость активированных строк матрицы вибромоторов может быть как линейной, так и нелинейной. На фиг.5 приведён пример линейной зависимости. Кроме того, данные зависимости для передней 2 и задней 3 матриц могут отличаться.
В соответствии с графиком на фиг.5 при расстоянии между датчиком и препятствием более 1,2 метра ни одна из строк не активируется, а, например, при расстоянии 0,4 метра активируется 6 вибромоторов в столбце, соответствующем данному датчику.
Пример осуществления изобретения.
Настоящая система была реализована на базе автомобиля VW Golf 6 поколения. При этом в качестве датчиков 6 использовались штатные парковочные датчики.
Устройство информирования водителя было сшито из хлопчатобумажной ткани и было выполнено в виде жилетки.
Спереди по всей поверхности грудной клетки и живота были пришиты небольшие карманы из той же ткани. Каждый карман имел размеры 3х3 см. Аналогичные карманы были пришиты по всей поверхности спины. Всего было пришито 32 кармана спереди и столько карманов же сзади.
В качестве вибромоторов были использованы эксцентриковые вибромоторы размером 4×8 мм. Каждый вибромотор был помещен в небольшой корпус, напечатанный на 3D принтере. Размеры корпуса составили 25х25х6 мм. Вибромоторы были закреплены в корпусах с помощью клея.
Затем данные корпуса с вибромоторами были размещены в карманах жилетки.
В качестве блока управления был использован микрокомпьютер Raspberry pi 4. Данный микрокомпьютер был подключен к CAN шине автомобиля посредством адаптера MCP2515. К модулю MCP2515 по интерфейсу SPI подключался микрокомпьютер Raspberry pi 4. Использование адаптера MCP2515 позволило в качестве датчиков расстояния использовать штатные парковочные ультразвуковые датчики.
Каждый вибромотор был подключён к силовому ключу LM3525MX-L/NOPB. Данный ключ позволяет управлять нагрузкой в позиционном режиме посредством USB интерфейса.
Для каждого вибромотора был задан свой адрес. Таким образом, при наличии в USB интерфейсе того или иного адреса вибромотора происходит включение соответствующего вибромотора.
Соответствующие функции блока управления были прописаны программным путем на языке Python. В данном случае, была использована библиотека python-can для работы с CAN шиной и pyserial для взаимодействия с USB портом. Ниже приведен пример кода, который демонстрирует базовую логику работы (целиком приводить весь код не имеет большого смысла):
import can
import serial
import time
# Инициализация CAN шины
bus = can.interface.Bus(channel='can0', bustype='socketcan_native')
# Инициализация соединения с USB портом
ser = serial.Serial('/dev/ttyUSB0', 9600) # Укажите правильный путь к USB порту и скорость соединения
# Функция для отправки команды на вибромоторы
def send_vibration_command(motor_id, intensity):
command = f'{motor_id}:{intensity}\n' # Пример команды: 'motor_id:intensity\n'
ser.write(command.encode())
# Основной цикл программы
while True:
# Чтение данных с CAN шины
message = bus.recv()
# Парсинг данных и определение motor_id и intensity
# Например, если message содержит нужную информацию
motor_id = 1 # Пример motor_id
intensity = 50 # Пример интенсивности
# Отправка команды на вибромоторы
send_vibration_command(motor_id, intensity)
Программа позволила каждому столбцу вибромоторов передней матрицы установить соответствие своего датчика в переднем бампере автомобиля, а каждому столбцу вибромоторов задней матрицы установить соответствие своего датчика в заднем бампере автомобиля.
Эксперименты с опытным образцом показали, что настоящее решение позволяет водителю автомобиля находиться в постоянном полном контакте с устройством информирования водителя в процессе парковки или в процессе рулежки в тесных местах, что в свою очередь позволяет водителю постоянно получать информацию о расстоянии до препятствия. При этом стабильность получения информации о ситуации вокруг автомобиля не зависит от позы и положения водителя на сидении транспортного средства. Кроме того, эксперименты показали, что получение информации таким способом не зависит от наличия и толщины верхней одежды, поскольку устройство информирования водителя может быть надето под верхнюю одежду.
Таким образом, за счет того, что система информирования водителя транспортного средства о расстоянии от транспортного средства до препятствия, заключается в том, что, используя датчики, установленные на транспортном средстве, определяют расстояние между транспортным средством и препятствием; затем информацию об измеренном расстоянии передают в блок управления; с помощью блока управления формируют управляющий сигнал; далее управляющий сигнал передают в устройство информирования водителя; устройство информирования водителя выполнено в виде элемента одежды, имеющего на передней и задней частях наборы вибромоторов; при этом блок управления выполнен с возможностью формирования управляющего сигнала для управления вибромоторами устройства информирования водителя в зависимости от измеренного расстояния между транспортным средством и препятствием, обеспечивается такой технический результат как практически полное снижение вероятности пропуска (недополучения) информации водителем транспортного средства о расстоянии до препятствия, поскольку обеспечивается постоянный полный контакт водителя транспортного средства с устройством информирования водителя в процессе парковки или в процессе рулежки в тесных местах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНФОРМИРОВАНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА О РАССТОЯНИИ ОТ ТРАНСПОРТНОГО СРЕДСТВА ДО ПРЕПЯТСТВИЯ | 2023 |
|
RU2817431C1 |
| УСТРОЙСТВО ТАКТИЛЬНОГО ИНФОРМИРОВАНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА О ДОРОЖНОЙ ОБСТАНОВКЕ | 2023 |
|
RU2820717C1 |
| УСТРОЙСТВО ПРИВЛЕЧЕНИЯ ВНИМАНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2709702C1 |
| Устройство предупреждения дорожно-транспортных происшествий при перестроении на автомобильных дорогах | 2023 |
|
RU2805577C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2718181C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2018 |
|
RU2763445C1 |
| УДАРОЗАЩИТНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2514999C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ПАРКОВКЕ | 2009 |
|
RU2529078C2 |
| СРЕДСТВО ИНФОРМИРОВАНИЯ О ПЕРЕМЕЩЕНИЯХ НОСИМОГО УСТРОЙСТВА | 2015 |
|
RU2710986C2 |
Изобретение относится к системе информирования водителя транспортного средства о расстоянии от транспортного средства до препятствия. Система содержит: датчики определения расстояния, блок управления и устройство информирования водителя. Датчики установлены на транспортном средстве и соединены с блоком управления. Блок управления соединён с устройством информирования водителя. Устройство информирования водителя выполнено в виде элемента одежды. Элемент одежды имеет на передней и задней частях наборы вибромоторов. Блок управления выполнен с возможностью формирования управляющего сигнала для управления вибромоторами. Сигнал формируется в зависимости от расстояния между транспортным средством и препятствием. Достигается снижение вероятности пропуска информации водителем транспортного средства о расстоянии до препятствия. 6 з.п. ф-лы, 7 ил.
1. Система информирования водителя транспортного средства о расстоянии от транспортного средства до препятствия, содержащая датчики для определения расстояния между транспортным средством и препятствием, блок управления и устройство информирования водителя, при этом датчики установлены на транспортном средстве и соединены с блоком управления, блок управления в свою очередь соединён с устройством информирования водителя, которое выполнено в виде элемента одежды, имеющего на передней и задней частях наборы вибромоторов, а блок управления выполнен с возможностью формирования управляющего сигнала для управления вибромоторами устройства информирования водителя в зависимости от измеренного расстояния между транспортным средством и препятствием.
2. Система по п.1, отличающаяся тем, что датчики выполнены ультразвуковыми, или оптическими, или радарными, или лидарными и установлены в переднюю и/или заднюю часть транспортного средства.
3. Система по п.2, отличающаяся тем, что каждый набор вибромоторов выполнен в виде матрицы вибромоторов.
4. Система по п.3, отличающаяся тем, что блок управления выполнен с возможностью формирования управляющего сигнала для управления передней матрицей вибромоторов устройства информирования водителя в зависимости от измеренного расстояния до препятствия перед транспортным средством, а также с возможностью формирования управляющего сигнала для управления задней матрицей вибромоторов устройства информирования водителя в зависимости от измеренного расстояния от задней части транспортного средства до препятствия.
5. Система по п.4, отличающаяся тем, что датчики установлены вдоль передней и/или задней частей транспортного средства, при этом каждому датчику соответствует один или несколько столбцов матрицы вибромоторов.
6. Система по п.5, отличающаяся тем, что активация строк матрицы вибромоторов зависит от расстояния, измеренного каждым датчиком.
7. Система по п.1, отличающаяся тем, что элемент одежды может быть выполнен в виде жилета, или кофты, или майки, или футболки, или толстовки, или куртки, или пуловера.
| US 2016107570 A1, 21.04.2016 | |||
| СПОСОБ ПРОИЗВОДСТВА ПЮРЕ ДЛЯ ДИЕТИЧЕСКОГО ПИТАНИЯ | 2014 |
|
RU2568504C1 |
| KR 101793142 B1, 02.11.2017 | |||
| US 10940872 B2, 09.03.2021 | |||
| WO 2023008893 A1, 02.02.2023. | |||
