Изобретение относится к области способов и средств предотвращения столкновений автомобилей, в частности, предотвращения столкновений при перестроении, и является по своей сути системой помощи водителю.
Известны способы и средства предупреждения столкновений при перестроении на автомобильных дорогах, основанные на обнаружении помех в соседних полосах при помощи различных датчиков и оценке опасности столкновения (RU 2726818, МПК G08G 1/16, G08G 1/09, B60W 30/08, B60W 30/09, B60W 30/095, B60W 30/12, B60W 50/14, B60W 50/16, опубл. 15.07.2020). Для оценки опасности столкновения используются средства определения параметров движения помех и совершения водителем маневра перестроения. Определение маневра перестроения происходит преимущественно на основе распознавания дорожной разметки по видеоданным, поступающим с камеры.
Недостатком такого способа является зависимость от наличия и качества видимости дорожной разметки. В современных реалиях обеспечить выполнение данных условий в любой момент времени и на любой дороге является сложной задачей. Более эффективными и универсальными являются способы и средства, определяющие маневр перестроения по другим показателям, например, повороту руля при включенных указателях поворота.
Наиболее близким по технической сущности к предлагаемому является способ предупреждения о столкновении (RU 2724044, МПК G08G 1/16, опубл. 18.06.2020). Техническое решение включает способ предупреждения о столкновении и реализующую его систему. Устройство устанавливается в автомобиле и состоит из датчиков обнаружения препятствий, датчика поворота руля, средств предупреждающей сигнализации и блока управления, который принимает сигналы от датчиков, обрабатывает их и при необходимости командует средству предупреждающей сигнализации выдать сигнал предупреждения. Устройство обнаруживает помехи в соседних полосах при помощи датчиков, определяет угол поворота руля, сравнивает его с пороговым значением и выдает водителю предупреждающий сигнал, если руль повернут на угол больше порогового значения, датчики обнаружили помеху и при этом включен соответствующий указатель поворота.
Недостатком данного решения является необходимость выполнения двух условий для распознавания маневра перестроения: включение указателя поворота и поворот руля в соответствующую сторону. Практика показывает, что не все водители пользуются указателями поворота при перестроении, поэтому возможна ситуация, когда руль повернут, указатель поворота не включен, но водитель действительно совершает перестроение. Оценивать же начало маневра только по повороту руля некорректно, так как водитель может поворачивать руль при вхождении в поворот дороги небольшого радиуса.
В сегменте способов и средств помощи водителю при перестроении также имеют место полноценные системы автоматического управления транспортным средством при необходимости совершения подобного манёвра (RU 2721635, МПК G08G 1/16, опубл. 21.05.2020), однако считать их аналогами предлагаемого решения нецелесообразно по причине их высокой сложности, следовательно, и высокой себестоимости, ввиду чего их применение более актуально для беспилотных транспортных средств, тогда как для обычных автомобилей, управляемых водителями, необходимы более простые системы помощи.
Технической задачей решения является определение аварийной ситуации при перестроении путём обнаружения помех в соседних полосах, распознавания попытки перестроения на основе регистрации движения в сторону помехи и оценки безопасности данного манёвра для повышения безопасности дорожного движения.
Технический результат представляет собой устройство предупреждения дорожно-транспортных происшествий при перестроении на автомобильных дорогах, содержащее двухантенные радарные датчики, установленные на правом и левом краю заднего бампера автомобиля, подключаемые к блоку управления через Can Area Controller трансиверы, блок управления в виде вычислительного устройства, обрабатывающий данные радарных датчиков и принимающий решения о сигнализации водителю, светодиодные индикаторы на боковых зеркалах заднего вида красного и зеленого света, вибромотор руля.
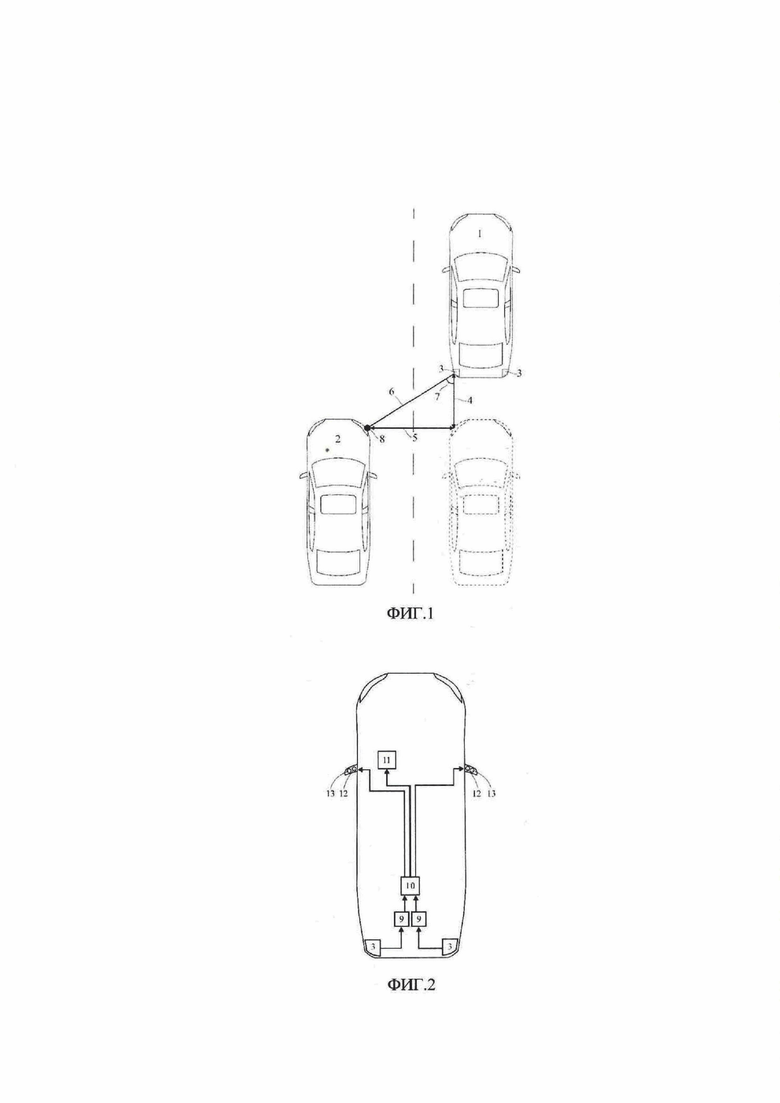
Фиг. 1. Схема дорожной ситуации при перестроении и определения необходимых численных показателей.
Фиг. 2. Схема предлагаемого устройства предупреждения дорожно-транспортных происшествий при перестроении.
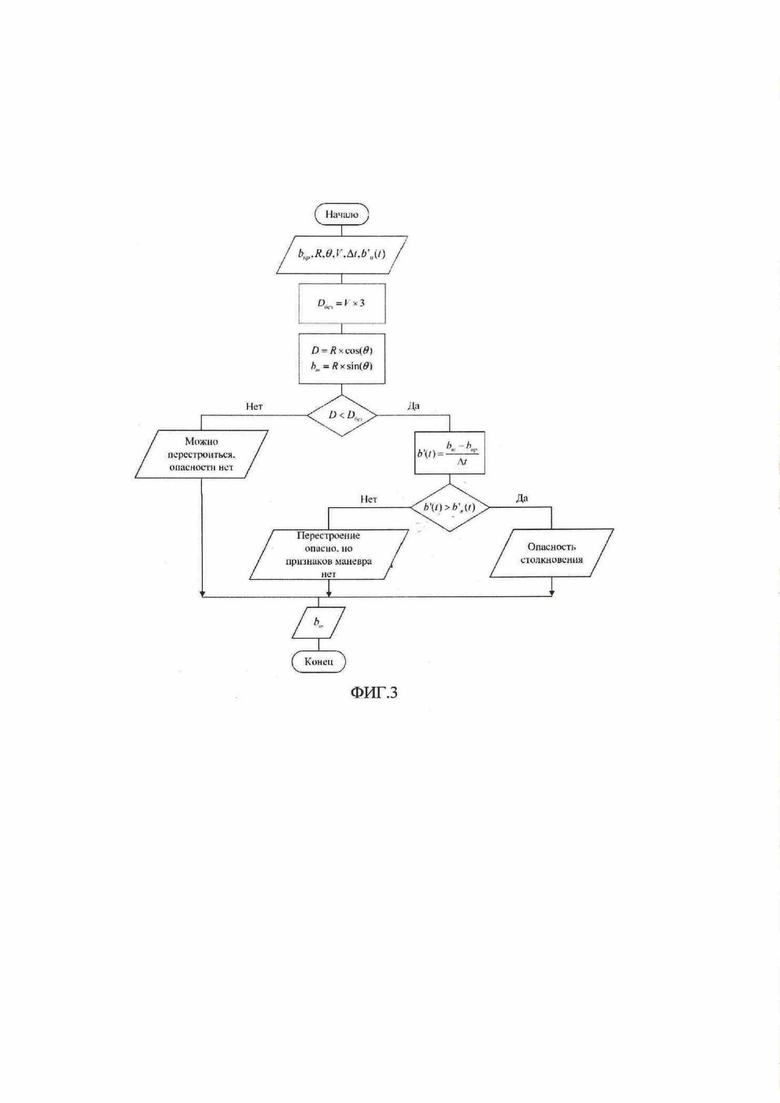
Фиг. 3. Алгоритм работы устройства.
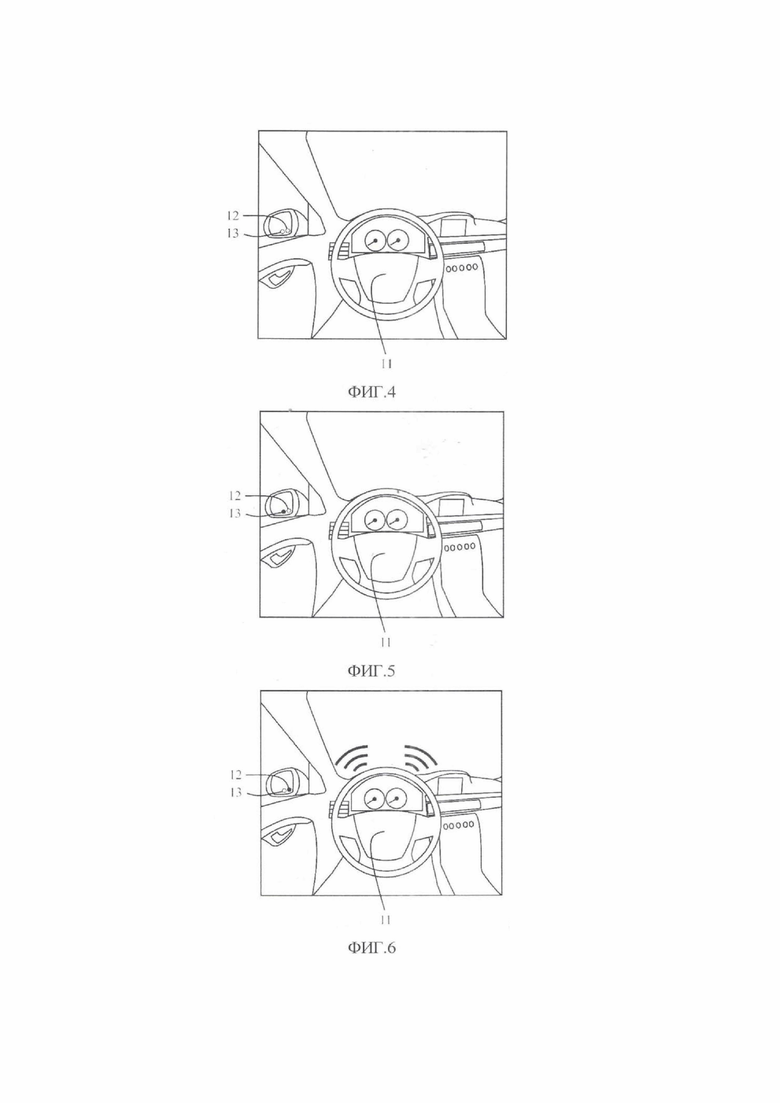
Фиг. 4. Индикация водителю при отсутствии помехи.
Фиг. 5. Индикация водителю при наличии помехи и безопасности условной дистанции.
Фиг. 6. Индикация водителю при наличии помехи и опасности условной дистанции.
Фиг. 7. Исследование с целью выбора порогового значения скорости сокращения условного бокового интервала.
Обнаружение помехи осуществляется радарным датчиком. Существующие радарные датчики позволяют определять скорость помехи, расстояние до нее и угловое положение по углу азимута между опорной линией радарной антенны – направлением обзора датчика и прямой, соединяющей опорную точку антенны с апертурной точкой цели. При помощи этих данных представляется возможным вычислять условную дистанцию и условный боковой интервал между автомобилем с устройством помощи и помехой.
Условная дистанция – это дистанция между автомобилем с устройством помощи и помехой, как если бы они двигались по одной полосе, представлена в виде выражения:
 (1)
(1)
где D – условная дистанция,  - угол азимута, а R – расстояние до помехи.
- угол азимута, а R – расстояние до помехи.
Условный боковой интервал – это боковой интервал между автомобилем с устройством помощи и помехой, как если бы они двигались рядом друг с другом, представлен в виде выражения:
где B – условный боковой интервал,  - угол азимута, а R – расстояние до помехи.
- угол азимута, а R – расстояние до помехи.
Так как дистанция и боковой интервал считаются минимальными расстояниями между фронтальными и боковыми бортами транспортных средств соответственно, то эти отрезки перпендикулярны друг другу. Вычисляя по данным радарного датчика условный боковой интервал (2) в реальном времени, представляется возможным определить скорость его сокращения b´(t) при маневре перестроения путем численного дифференцирования.
Критерием распознавания маневра перестроения в предлагаемом решении является превышение установленного порогового значения скорости сокращения условного бокового интервала. Однако наличие помехи в зоне видимости датчика и факт движения автомобиля в сторону помехи еще не означает аварийную ситуацию, т.е. возможное столкновение.
Дополнительным критерием определения аварийной ситуации предлагается считать безопасность условной дистанции между автомобилем с устройством помощи и помехой. Безопасной дистанцией считается такое фронтальное расстояние между автомобилями, при котором автомобиль, движущийся сзади, успеет остановиться независимо от своей скорости при наступлении опасности. То есть сразу после завершения перестроения дистанция между автомобилем с устройством помощи и его помехой не должна оказаться небезопасной.
Безопасность условной дистанции предлагается оценивать по правилу трех секунд, как расстояние, которое проходит помеха за три секунды при сохранении текущего скоростного режима, и определяется следующим образом:
где V – скорость помехи. Если D ≥ Dбез, манёвр безопасен.
Автомобиль с устройством помощи получает данные о скорости помехи с помощью радарного датчика на основе эффекта Доплера. Если условная дистанция (1) больше или равна рассчитанной в текущий момент времени безопасной дистанции, то опасности столкновения при совершении перестроения или после него нет.
Для предупреждения столкновения предлагается использовать совокупность световой сигнализации и вибрации руля. Световую сигнализацию зеленого и красного цвета использовать для указания на помеху и безопасность условной дистанции, а вибрацию руля применять при попытке совершить маневр в опасной ситуации. Управление сигнализацией на основе данных радарных датчиков выполняется блоком управления, представляющим собой вычислительное устройство, на которое передаются данные датчиков через Can Area Controller трансиверы.
На фиг. 1 показана схема, отражающая дорожную ситуацию при перестроении на автомобильной дороге с двумя полосами в попутном направлении, а также определение необходимых величин. По правой полосе движется автомобиль 1 с устройством помощи водителю. По левой полосе движется автомобиль 2, являющийся помехой при перестроении в левую полосу. Левый радарный датчик 3 автомобиля 1 обнаруживает помеху и измеряет расстояние до неё как длину отрезка 6, соединяющего опорную точку антенны датчика с апертурной точкой цели 8. Условная дистанция между автомобилями 1 и 2 – отрезок 4, лежащий на опорной линии радарной антенны, направленной назад. Отрезок 5 – условный боковой интервал между автомобилями 1 и 2. Так как дистанция и боковой интервал перпендикулярны друг другу как минимальные расстояния между соседними бортами автомобилей, то отрезки 4, 5 и 6 образуют прямоугольный треугольник, в котором 6 – расстояние до цели, а 7 – угол азимута, измеряемые радарным датчиком. Следует отметить, что кузова современных автомобилей не обладают точной прямоугольной формой в горизонтальной проекции, поэтому в вычислении условной дистанции и условного бокового интервала возможна погрешность в 10 – 20 см, связанная с определением апертурной точки цели, которую необходимо учитывать при работе устройства.
На фиг. 2 показана структурная схема устройства. Радарные датчики 3 подключены к блоку управления 10 и передают данные через блоки приема-передачи на основе Can Area Controller трансиверов 9. Блок управления 10 обрабатывает данные радарных датчиков, рассчитывает необходимые величины и управляет сигнализацией водителю через светодиодные индикаторы красного цвета 12 и зелёного цвета 13 на боковых зеркалах заднего вида, а также вибромотором руля 11. Светодиодные индикаторы могут быть выполнены как в виде обычной светодиодной лампы, так и декоративного изображения машины, в которое встроена соответствующая светодиодная лампа.
Предлагаемый способ предупреждения столкновений при перестроении с помощью описанного устройства реализуется следующим образом (фиг.3). Радарные датчики, расположенные в правом и левом углу заднего бампера, непрерывно сканируют пространство в соседних полосах. Использование в датчиках двух антенн, у одной из которых опорная линия (направление обзора) направлена назад параллельно продольной оси автомобиля, а у другой – вбок перпендикулярно продольной оси, позволяет охватывать, в том числе, слепые зоны боковых зеркал. При появлении помехи в зоне видимости датчика цель берется на сопровождение его радаром, и в реальном времени определяется расстояние до нее R, мгновенная скорость V и угловое положение (угол азимута) θ. Эти данные передаются в блок управления, который с заданным интервалом времени Δt рассчитывает на основе этих данных условную дистанцию D и текущий условный боковой интервал bт, а также оценивает безопасность условной дистанции Dбез по правилу трех секунд (3). Используя значение условного бокового интервала на предыдущем шаге расчетов bпр, блок управления оценивает, имеет ли место сокращение условного бокового интервала. Если сокращение зафиксировано, блок определяет скорость сокращения следующим образом:
где Δt – интервал времени, в который измеряется условный боковой интервал (шаг дифференцирования), bпр – предыдущее значение условного бокового интервала, bт – текущее значение.
Если скорость сокращения условного бокового интервала (4) превышает заданное пороговое значение b´п(t), то блок управления фиксирует попытку перестроения со стороны водителя. Сигнализация водителю выдается следующим образом:
1. При отсутствии помехи никаких сигналов не выдается, индикаторы помехи 12 и 13 на боковых зеркалах не активны, руль не вибрирует (фиг. 4).
2. Если помеха присутствует в зоне видимости датчика, но условная дистанция безопасна (D ≥ Dбез), то на соответствующем боковом зеркале горит светодиодный индикатор помехи зеленого цвета 13. При попытке перестроения руль не вибрирует – перестроение разрешено (фиг. 5).
3. Если помеха присутствует в зоне видимости датчика, но условная дистанция небезопасна (D < Dбез), то на соответствующем боковом зеркале горит светодиодный индикатор помехи красного цвета 12. Вибрация руля 11 включается при попытке перестроения (b´(t) > b´п(t)) с одновременным переводом индикатора 12 в режим мигания (фиг. 6).
Пороговое значение скорости сокращения условного бокового интервала определено путем имитационного моделирования, в результате которого выполнены статистические исследования маневра плавного и резкого перестроения. Плавное перестроение характеризуется практически отсутствием видимого поворота корпуса автомобиля в сторону соседней полосы. Выраженность такого поворота при резком перестроении влияет на направление обзора антенны радарного датчика и может оказывать влияние на расчет вышеописанных величин. Для сравнения двух вариантов перестроения построены графики (фиг. 7) средних значений скорости сокращения условного бокового интервала b´(t). Анализируя полученные данные по t-критерию Стьюдента tкр для двух вариантов перестроений, были получены следующие значения: tкр = -1,3205, p = 0,2064, где p – уровень значимости. При условии выполнения неравенства p > 0,05 можно сделать вывод о том, что существенной разницы в динамике b´(t) между вариантами резкого и плавного перестроения не наблюдается.
Способ определения порогового значения заключается в выборе среднего значения из двух диапазонов, представленный в виде выражения:
 (5)
(5)
где  - пороговое значение, D1 – диапазон средних отрицательных значений скорости сокращения условного бокового интервала при резком перестроении, D2 – диапазон средних отрицательных значений скорости сокращения условного бокового интервала при плавном перестроении.
- пороговое значение, D1 – диапазон средних отрицательных значений скорости сокращения условного бокового интервала при резком перестроении, D2 – диапазон средних отрицательных значений скорости сокращения условного бокового интервала при плавном перестроении.
В соответствии с определенным выше выражением (5), было определено пороговое значение, равное 3,39 м/c.
Преимущества предлагаемого решения состоят в том, что определение аварийной ситуации не зависит ни от работы указателей поворота, ни от угла поворота руля, ни от наличия и качества видимости дорожной разметки. Кроме того, решение позволяет водителю не только видеть световую сигнализацию наличия помехи, но и определять по ней, безопасно ли в данный момент перестроение, что не всегда можно определить мгновенно и безошибочно только по одному виду в боковое зеркало. Таким образом, решение позволяет уменьшить вероятность ошибочных действий водителя и чрезмерной концентрации внимания на боковом зеркале, которые могут привести к дорожно-транспортному происшествию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ О СТОЛКНОВЕНИИ | 2019 |
|
RU2724044C1 |
| Способ управления движением автомобильной техники в составе колонны с учетом состояния опорной поверхности, рельефа и кривизны маршрута | 2022 |
|
RU2790889C1 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ, ДВИЖУЩИХСЯ ДРУГ ЗА ДРУГОМ ПО ОДНОЙ ПОЛОСЕ | 2023 |
|
RU2822940C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕКТОВ | 2022 |
|
RU2806452C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ОБЪЕКТОВ | 2022 |
|
RU2814813C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2625213C2 |
| Способ автоматизированного оповещения водителей транспортных средств на особо опасных участках дороги | 2016 |
|
RU2666103C2 |
| Система обеспечения безопасности участников дорожного движения при наличии на дороге двухколесных транспортных средств | 2017 |
|
RU2682149C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2737069C1 |

Изобретение относится к устройству предупреждения дорожно-транспортных происшествий при перестроении на автомобильных дорогах. Устройство содержит: двухантенные радарные датчики, блок управления, трансиверы, светодиодные индикаторы, вибромотор руля. Двухантенные радарные датчики установлены на правом и левом краях заднего бампера автомобиля. На боковых зеркалах заднего вида установлена раздельная сигнализация красного или зеленого цвета в зависимости от безопасности дистанции между автомобилем и помехой в соседней полосе. Блок управления распознаёт манёвр перестроения и вычисляет скорость сокращения бокового интервала между автомобилем и помехой в соседней полосе. Достигается определение аварийной ситуации при перестроении. 7 ил.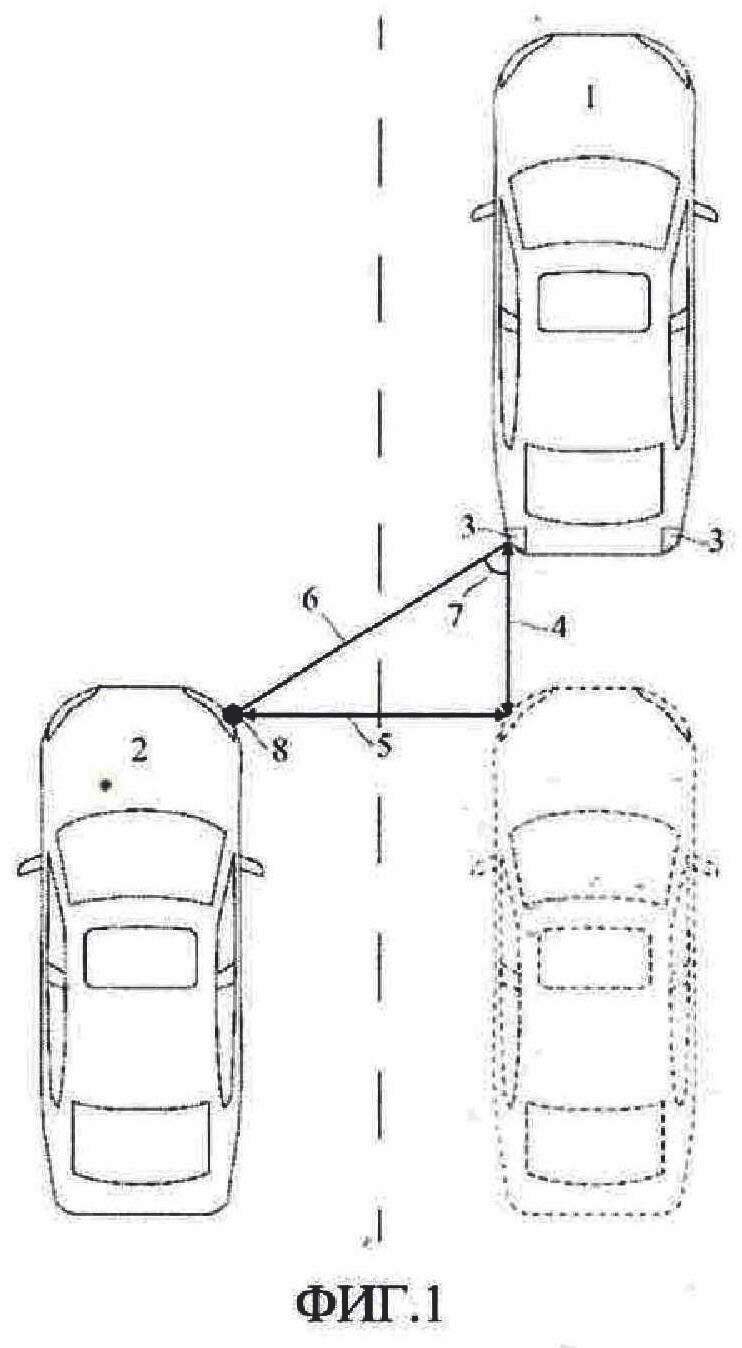
Устройство предупреждения дорожно-транспортных происшествий при перестроении на автомобильных дорогах, содержащее двухантенные радарные датчики, установленные на правом и левом краю заднего бампера автомобиля, подключаемые к блоку управления через Can Area Controller трансиверы, блок управления в виде вычислительного устройства, обрабатывающий данные радарных датчиков и принимающий решения о сигнализации водителю, светодиодные индикаторы на боковых зеркалах заднего вида красного и зеленого света, вибромотор руля, отличающееся тем, что на боковых зеркалах заднего вида установлена раздельная сигнализация красного или зеленого цвета наличия помехи в зависимости от безопасности условной дистанции между автомобилем с данным устройством и помехой в соседней полосе, а блок управления распознаёт манёвр перестроения по данным, поступающим с установленных на правом и левом краю заднего бампера автомобиля радарных датчиков, вычисляя скорость сокращения условного бокового интервала между автомобилем с данным устройством и помехой в соседней полосе.
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ О СТОЛКНОВЕНИИ | 2019 |
|
RU2724044C1 |
| RU 2016117408 A, 14.11.2017 | |||
| WO 2017180364 A1, 19.10.2017 | |||
| US 2005015203 A1, 20.01.2005 | |||
| WO 2018020547 A1, 01.02.2018. | |||
