[Область техники, к которой относится изобретение]
[0001] Настоящее изобретение относится к способу управления транспортным средством и устройству управления транспортным средством.
[Уровень техники]
[0002] Традиционно известен следующий метод (например, Патентный документ 1). Метод включает в себя вычисление целевой скорости к положению ожидания смены полосы движения, управляет скоростью рассматриваемого транспортного средства на основании целевой скорости и определяет, что выполнено условие помощи при смене полосы движения, когда управление скоростью рассматриваемого транспортного средства не продолжалось в течение заданного времени. Затем, после того, как условие поддержки смены полосы движения выполнено, метод включает в себя включение указателя поворота, чтобы ясно указать другим транспортным средствам намерение выполнить перестроение.
[Документ из уровня техники]
[Патентный Документ]
[0003]
[Патентный документ 1] JP 2009-78735
[Раскрытие изобретения]
[Проблемы, решаемые изобретением]
[0004] Например, в вышеупомянутом уровне техники существует описанная ниже проблема, когда рассматриваемое транспортное средство ускоряется сзади другого транспортного средства и выполняет смену полосы движения в положении впереди другого транспортного средства из состояния, в котором рассматриваемое транспортное средство движется по одной полосе движения из двух полос движения, а другое транспортное средство движется по другой полосе движения из двух полос движения. Существует проблема, заключающаяся в том, что, если условие поддержки смены полосы движения выполнено, и указатель поворота приводится в действие в состоянии, когда рассматриваемое транспортное средство находится позади другого транспортного средства, другое транспортное средство не может понять, в какое положение рассматриваемое транспортное средство хочет перестроиться. В результате рассматриваемое транспортное средство не может легко информировать другое транспортное средство о намерении перестроения рассматриваемого транспортного средства.
[0005] Проблема, решаемая настоящим изобретением, состоит в создании способа управления транспортным средством и устройства управления транспортным средством, которые облегчают информирование другого транспортного средства о намерении перестроения рассматриваемого транспортного средства, когда рассматриваемое транспортное средство перестраивается на смежную полосу движения.
[Средства для решения проблем]
[0006] Настоящее изобретение решает вышеупомянутую проблему, получая данные обнаружения другого транспортного средства, движущегося в смежной полосе движения, устанавливая в смежной полосе движения целевую точку для смены полосы движения рассматриваемым транспортным средством с полосы движения, в которой осуществляется движение, на соседнюю полосу движения на основании взаимного расположения между рассматриваемым транспортным средством и другим транспортным средством, указывая другое транспортное средство, которое расположено сзади целевой точки, как заднее транспортное средство, и начиная приводит в действие указатель поворота рассматриваемого транспортного средства, когда задний конец рассматриваемого транспортного средства находится впереди переднего конца заднего транспортного средства. Таким образом настоящее изобретение решает вышеупомянутую проблему за счет начала приведения в действие указателя поворота в момент, когда пользователь заднего транспортного средства может визуально распознать приведение в действие указателя поворота.
[Эффект изобретения]
[0007] Согласно настоящему изобретению, когда рассматриваемое транспортное средство перестраивается в полосу движения в положении впереди другого транспортного средства, рассматриваемое транспортное средство может легко информировать другое транспортное средство о намерении перестроения рассматриваемого транспортного средства.
[Краткое описание чертежей]
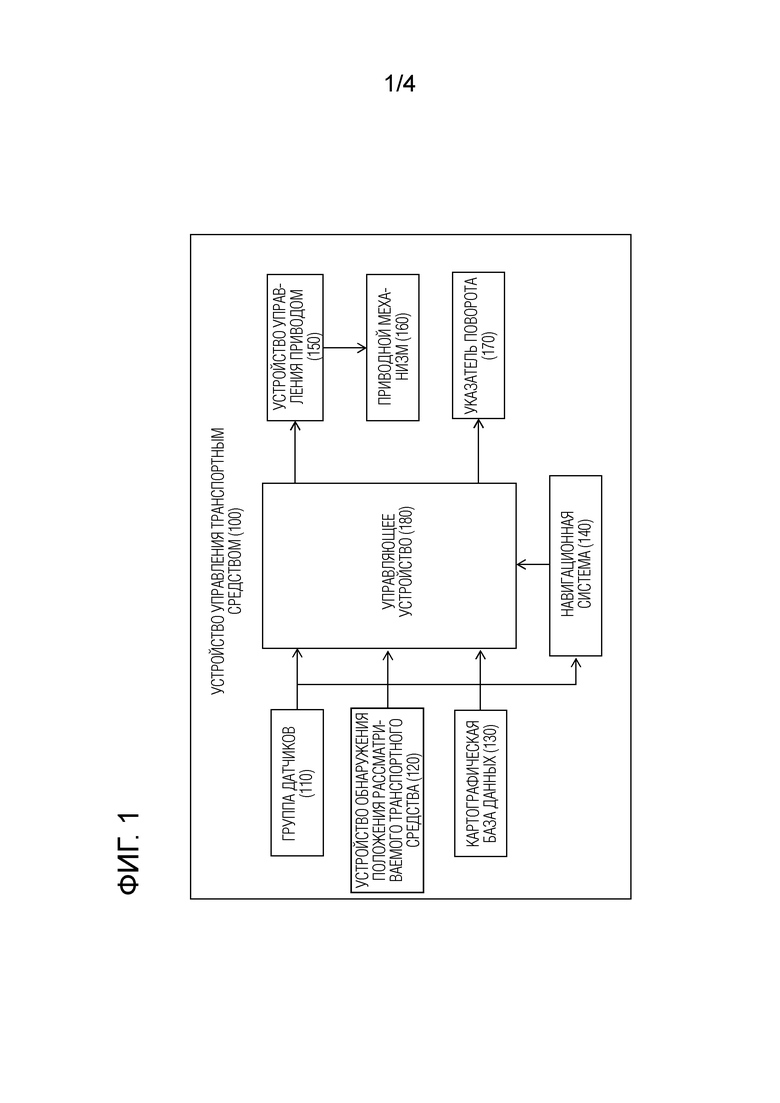
Фиг. 1 - схема конфигурации, показывающая конфигурацию устройства управления транспортным средством согласно настоящему варианту осуществления.
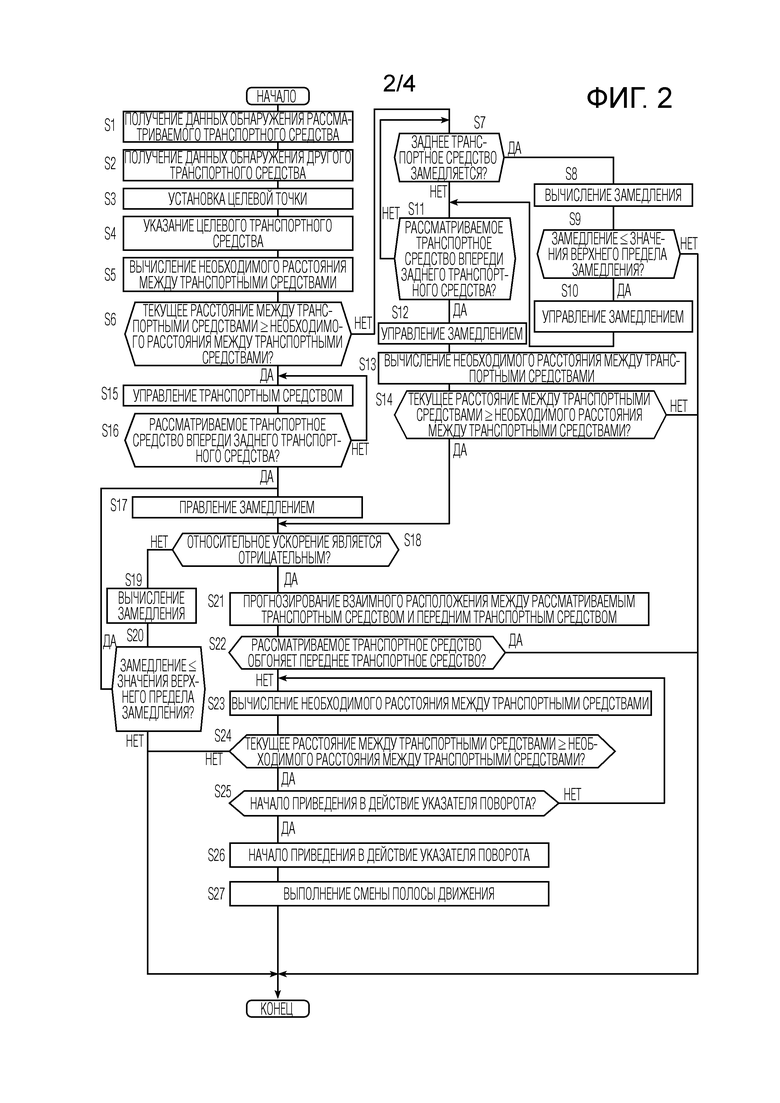
ФИГ. 2 - блок-схема, иллюстрирующая последовательность операций управления устройством управления.
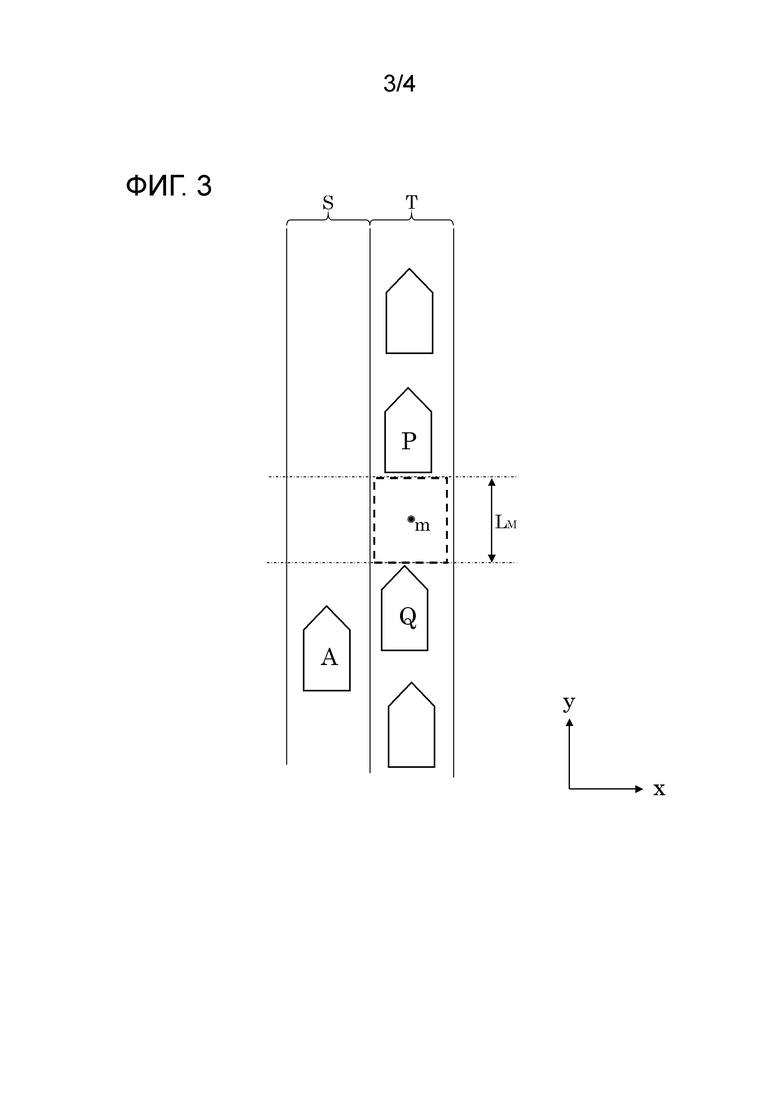
ФИГ. 3 - схема, иллюстрирующая ситуацию, в которой рассматриваемое транспортное средство приближается сзади к заднему транспортному средству, чтобы выполнить смену полосы движения.
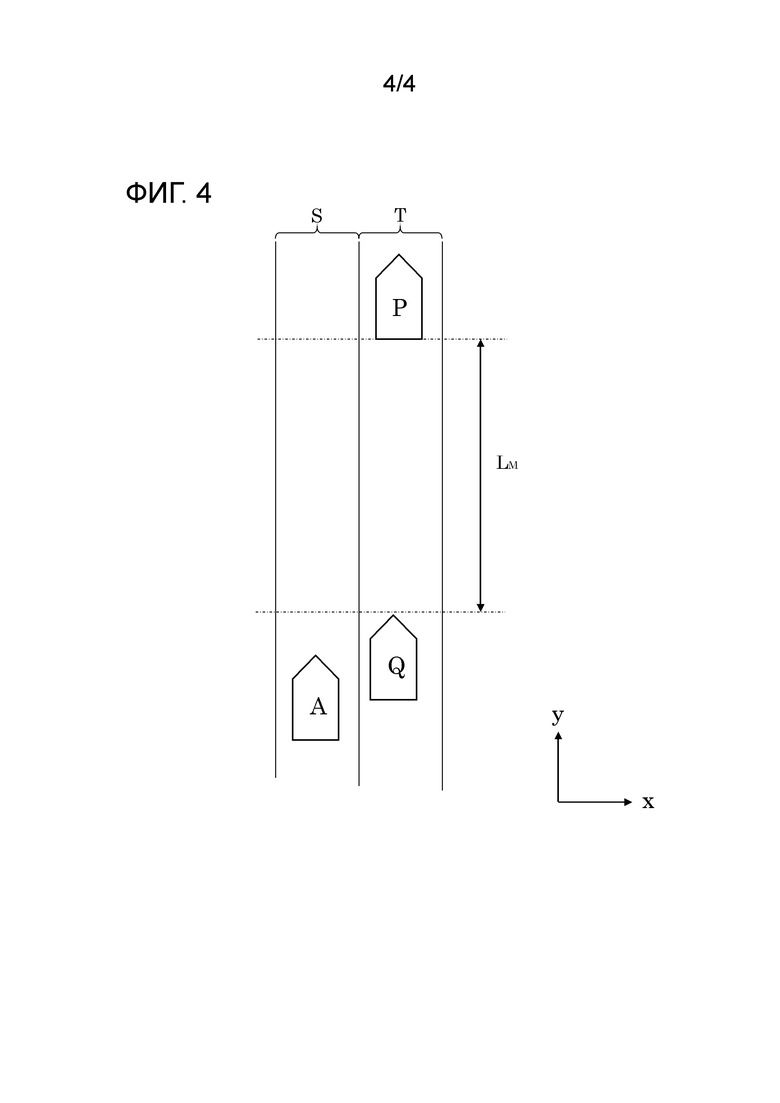
ФИГ. 4 - схема, иллюстрирующая ситуацию, в которой рассматриваемое транспортное средство приближается сзади к заднему транспортному средству, чтобы выполнить смену полосы движения.
[Осуществление изобретения]
[0009] Далее способ управления транспортным средством и устройство управления транспортным средством согласно одному или более вариантам осуществления настоящего изобретения будут описаны с обращением к чертежам. Настоящий вариант осуществления будет описан на примере устройства управления транспортным средством, установленного в транспортном средстве.
[0010] Фиг. 1 представляет собой схему, показывающую конфигурацию устройства 100 управления транспортным средством согласно одному или более вариантам осуществления настоящего изобретения. Как показано на фиг. 1, устройство 100 управления транспортным средством согласно настоящему варианту осуществления включает в себя группу 110 датчиков, устройство 120 обнаружения положения рассматриваемого транспортного средства, картографическую базу 130 данных, навигационную систему 140, устройство 150 управления движением, приводной механизм 160, указатель 170 поворота и управляющее устройство (процессор) 180. Эти устройства соединены CAN (локальной сетью контроллеров) или другими бортовыми локальными сетями (LAN) для обмена информацией друг с другом.
[0011] Группа 110 датчиков имеет внешний датчик для обнаружения состояния (внешнего состояния) вокруг рассматриваемого транспортного средства и внутренний датчик для обнаружения состояния (внутреннего состояния) рассматриваемого транспортного средства. Примеры внешнего датчика включают в себя, например, переднюю камеру для формирования изображения области впереди рассматриваемого транспортного средства, заднюю камеру для формирования изображения области сзади рассматриваемого транспортного средства, передний радар для обнаружения препятствия впереди рассматриваемого транспортного средства, задний радар для обнаружения препятствия сзади рассматриваемого транспортного средства, и боковой радар для обнаружения препятствия, присутствующего сбоку от рассматриваемого транспортного средства. Передняя камера представляет собой монокулярный блок камеры, установленный в верхней части лобового стекла и за зеркалом салона. Передняя камера может быть камерой с комбинированным объективом. Передний радар представляет собой радар или лазерный сканер, способный распознавать окружающие объекты впереди. Боковой радар и задний радар представляют собой четыре радара, установленные в каждом правом и левом углу внутренней части переднего и заднего бампера, соответственно, и распознают объект во всех направлениях вместе с передней камерой. По существу, боковой радар и задний радар могут представлять собой камеру или лазерный сканер. Количество радаров не ограничено четырьмя при условии, что объект можно распознавать во всех направлениях. Внутренние датчики включают в себя датчик скорости транспортного средства для обнаружения скорости транспортного средства для рассматриваемого транспортного средства, датчик ускорения для обнаружения ускорения рассматриваемого транспортного средства, бортовую камеру для формирования изображения внутренней части рассматриваемого транспортного средства, датчик угла рыскания для обнаружения относительного направления рассматриваемого транспортного средства относительно поверхности дороги, и датчик угла рулевого управления для обнаружения угла рулевого управления. Датчик скорости транспортного средства обнаруживает скорость транспортного средства по скорости вращения оси и скорости вращения трансмиссии. Датчик ускорения представляет собой датчик MEMS, и он обнаруживает ускорение в направлении движения транспортного средства. По существу, датчик 4 ускорения не обязательно должен быть датчиком MEMS, или ускорение может быть определено путем дифференцирования значения скорости транспортного средства, полученного от датчика скорости транспортного средства, вместо ускорения, полученного от упомянутого датчика. По существу, внешний датчик и внутренний датчик могут быть выполнены с возможностью использования одного из множества датчиков, описанных выше, или могут быть выполнены с возможностью использования сочетания двух или более типов датчиков. Результат обнаружения (данные обнаружения) группы 110 датчиков выводится в навигационную систему 140 и управляющее устройство 180. В результате навигационная система 140 и управляющее устройство 180 получают внешнюю информацию и информацию о движении.
[0012] Объекты, обнаруживаемые группой 110 датчиков, включают в себя, например, велосипеды, мотоциклы, транспортные средства (далее также называемые другими транспортными средствами), препятствия на дороге, светофоры, дорожную разметку (включая разметку полос движения) и пешеходные переходы. Например, если имеется другое транспортное средство, движущееся в окружении рассматриваемого транспортного средства, группа 110 датчиков определяет направление, в котором находится другое транспортное средство, и расстояние до другого транспортного средства на основании положения рассматриваемого транспортного средства, и относительную скорость другого транспортного средства на основании скорости транспортного средства для рассматриваемого транспортного средства. Группа 110 датчиков обнаруживает скорость транспортного средства, угол рыскания и угол рулевого управления рассматриваемого транспортного средства. Кроме того, например, когда рассматриваемое транспортное средство движется по определенной полосе движения, группа 110 датчиков обнаруживает полосу движения, в которой осуществляется движение, по которой движется рассматриваемое транспортное средство (далее также именуемую рассматриваемой полосой движения), и полосу движения, расположенную сбоку рассматриваемой полосы движения (в направлении ширины транспортного средства) и смежно с рассматриваемой полосой движения (далее также называемой смежной полосой движения). Полоса движения рассматриваемого транспортного средства и смежные полосы движения разделены границами полос движения, и группа 110 датчиков обнаруживает полосу движения путём определения линии границы полос движения (линии, такой как белая линия) из захваченного изображения с использованием технологии распознавания изображений или тому подобного.
[0013] Устройство 120 обнаружения положения рассматриваемого транспортного средства является устройством для получения информации о положении, указывающей текущее положение рассматриваемого транспортного средства. Устройство 120 обнаружения положения рассматриваемого транспортного средства, например, состоит из блока GPS и гироскопического датчика и тому подобного. Устройство 120 обнаружения положения рассматриваемого транспортного средства обнаруживает радиоволны, передаваемые от множества спутников связи, посредством блока GPS, для периодического получения информации о положении рассматриваемого транспортного средства, и обнаруживает текущее положение рассматриваемого транспортного средства на основании полученной информации о положении рассматриваемого транспортного средства, информации об изменении угла, полученной от гироскопического датчика, и скорости транспортного средства, полученной от датчика скорости транспортного средства (не показан). Информация о положении, полученная устройством 120 обнаружения положения рассматриваемого транспортного средства, выводится в навигационную систему 140 и управляющее устройство 180. В результате навигационная система 140 и управляющее устройство 180 получают информацию о положении.
[0014] Картографическая база 130 данных хранит картографическую информацию. Картографическая информация включает в себя информацию о дороге и информацию о правилах дорожного движения. Информация о дороге определяется узлами и участками, соединяющими узлы. Участки идентифицируются на уровне полос движения.
[0015] В информации о дороге по настоящему варианту осуществления тип дороги, ширина дороги, форма дороги, возможно ли движение прямо вперед, отношение приоритетности движения, возможен ли обгон (возможен ли выезд в смежную полосу движения), возможна ли смена полосы движения, и другая информация о дороге сохраняется, соответственно, для каждой идентификационной информации каждого участка дороги. Кроме того, в информации о дороге информация о положении перекрестка, направлении приближения к перекрестку, типе перекрестка, и другая информация о перекрестке сохраняется, соответственно, для каждой идентификационной информации каждого участка дороги.
[0016] Картографическая информация, сохраняемая в картографической базе 130 данных, может быть картографической информацией с высоким разрешением, подходящей для автоматического управления. Картографическая информация с высоким разрешением может быть сформирована на основании информации, получаемой в режиме реального времени с использованием группы 110 датчиков. В настоящем варианте осуществления автоматическое управление указывает операцию управления, в которой субъект управления представлен не только водителем. Например, субъект управления включает в себя контроллер транспортного средства (не показан) для поддержки операции управления, выполняемой водителем, вместе с водителем, или субъект управления включает в себя контроллер транспортного средства (не показан) для выполнения операции управления от имени водителя. Автоматическое управление выполняется в соответствии с правилами дорожного движения.
[0017] Навигационная система 140 представляет собой систему для направления водителя рассматриваемого транспортного средства путем указания маршрута от текущего положения рассматриваемого транспортного средства до места назначения на основании информации о текущем положении рассматриваемого транспортного средства. Различные типы информации вводятся в навигационную систему 140 из группы 110 датчиков, устройства 120 обнаружения положения рассматриваемого транспортного средства и картографической базы 130 данных. Когда водитель или другой пользователь вводит информацию о месте назначения рассматриваемого транспортного средства, информация о месте назначения вводится в навигационную систему 140. Навигационная система 140 формирует маршрут движения от текущего положения рассматриваемого транспортного средства до места назначения на основании введенной различной информации. Затем информация для направления по маршруту для направления по маршруту движения, сформированная навигационной системой 140, выводится водителю и другим пользователям на дисплее и тому подобном.
[0018] Устройство 150 управления движением управляет движением рассматриваемого транспортного средства. Устройство 150 управления движением включает в себя механизм управления тормозом, механизм управления акселератором, механизм управления двигателем и устройство HMI (человеко-машинного интерфейса) и тому подобное. Управляющий сигнал вводится в устройство 150 управления движением из управляющего устройства 180, которое будет описано ниже. В соответствии с управлением управляющего устройства 180 устройство 150 управления движением выполняет автоматическое управление рассматриваемым транспортным средством путем управления работой приводного механизма 160 (включая работу двигателя внутреннего сгорания в случае транспортного средства с двигателем, работу электродвигателя в случае системы электрического транспортного средства, и распределение крутящего момента между двигателем внутреннего сгорания и электродвигателем в случае гибридного транспортного средства, включая работу тормоза) и работой исполнительного механизма рулевого управления и тому подобного. Устройство 150 управления движением в соответствии с управляющим сигналом от управляющего устройства 180 может управлять направлением движения рассматриваемого транспортного средства путём управления величиной торможения каждого колеса транспортного средства. Управление каждым механизмом может выполняться полностью автоматически или может выполняться таким образом, чтобы помогать водителю в операции управления. Управление каждым механизмом может быть прервано или остановлено путём вмешательства водителя. Способ управления движением с помощью устройства 150 управления движением не ограничен вышеописанным способом управления, и могут использоваться другие хорошо известные способы.
[0019] Приводной механизм 160 включает в себя двигатель внутреннего сгорания и/или мотор, и тормозной механизм. Указатель 170 поворота представляет собой устройство для указания окружению направления изменения курса во время изменения курса.
[0020] Управляющее устройство 180 включает в себя ROM (постоянное запоминающее устройство), в котором сохранена программа для управления движением рассматриваемого транспортного средства, CPU (центральный процессор) для выполнения программы, сохранённой в ROM, и RAM (оперативное запоминающее устройство) для работы в качестве запоминающего устройства с возможностью осуществления доступа. В качестве схем управления вместо CPU (центральным процессором) или вместе с ним может использоваться MPU (микропроцессор), DSP (цифровой сигнальный процессор), ASIC (специализированная интегральная схема) и FPGA (программируемая вентильная матрица). В настоящем варианте осуществления устройство 150 управления движением и управляющее устройство 180 разделены на два контроллера; устройство 150 управления движением и управляющее устройство 180 могут быть составлены в одном контроллере.
[0021] Управляющее устройство 180 имеет функцию получения состояния транспортного средства, функцию установки целевой точки, функцию указания целевого транспортного средства, функцию установки целевой области, функцию управления движением и функцию управления указателем поворота путем выполнения программы, сохранённой в ROM посредством CPU.
[0022] Здесь будет описана конкретная ситуация, в которой управляющее устройство 180 управляет транспортным средством путём выполнения различных функций. Рассматриваемое транспортное средство движется по одной полосе движения (полосе движения, в которой осуществляется движение) из множества полос движения, а другое транспортное средство движется по другой полосе движения (смежной полосе движения). Другое транспортное средство в смежной полосе движения может быть одним или двумя или более. В таком состоянии для перестроения в положении впереди другого транспортного средства, движущегося в смежной полосе движения, рассматриваемое транспортное средство управляет скоростью транспортного средства таким образом, чтобы приблизиться к положению, которое будет целью смены полосы движения, впереди другого транспортного средства в полосе движения, в которой осуществляется движение. Затем рассматриваемое транспортное средство приводит в действие указатель поворота, чтобы сообщить другим транспортным средствам, расположенным позади рассматриваемого транспортного средства, о намерении выполнить перестроение. Управляющее устройство 180 выполняет различные функции для реагирования на такую ситуацию. Каждая функция будет описана ниже.
[0023] Будет описана функция получения состояния транспортного средства. Управляющее устройство 180 получает данные обнаружения, включая информацию, обнаруженную группой 110 датчиков, от датчика скорости транспортного средства, датчика угла рулевого управления и тому подобного, включенных в группу 110 датчиков. Данные обнаружения включают в себя информацию (информацию, указывающую состояние транспортного средства для рассматриваемого транспортного средства), такую как скорость транспортного средства, угол рыскания и угол рулевого управления рассматриваемого транспортного средства. Управляющее устройство 180 получает информацию о текущем положении рассматриваемого транспортного средства от устройства 120 обнаружения положения рассматриваемого транспортного средства. Таким образом, управляющее устройство 180 получает данные обнаружения, включая информацию о состоянии транспортного средства для рассматриваемого транспортного средства, такую как скорость транспортного средства, текущее положение и угол наклона. Управляющее устройство 180 получает данные обнаружения, включая информацию о состоянии транспортного средства для множества других транспортных средств, расположенных в окружении рассматриваемого транспортного средства, от камер, радаров и тому подобного, включенных в группу 110 датчиков. Состояние другого транспортного средства указывается положением и/или скоростью другого транспортного средства для другого транспортного средства, и т.д. Управляющее устройство 180, исходя из состояния транспортного средства для рассматриваемого транспортного средства и состояния транспортного средства для другого транспортного средства, вычисляет взаимное расположение между рассматриваемым транспортным средством и другим транспортным средством и относительную скорость другого транспортного средства относительно рассматриваемого транспортного средства, соответственно.
[0024] Будет описана функция установки целевой точки. Управляющее устройство 180 устанавливает целевую точку для выполнения смены полосы движения рассматриваемым транспортным средством в полосе движения как цель смены полосы движения на основании взаимного расположения между рассматриваемым транспортным средством и другим транспортным средством. Целевая точка устанавливается в положении перед другим транспортным средством, движущимся в смежной полосе движения. Если в смежной полосе движения движется множество других транспортных средств, управляющее устройство 180 сравнивает пространство перед каждым другим транспортным средством и устанавливает целевую точку в области с самым длинным свободным пространством в направлении вдоль полосы движения.
[0025] Будет описана функция установки целевого транспортного средства. Управляющее устройство 180 идентифицирует другие транспортные средства, движущиеся в смежных полосах движения, на основании взаимного расположения между рассматриваемым транспортным средством и другими транспортными средствами. Управляющее устройство 180 устанавливает транспортное средство, находящееся за целевой точкой, как целевое транспортное средство. Целевое транспортное средство - это транспортное средство, которое является целью для перестроения перед транспортным средством, когда рассматриваемое транспортное средство меняет полосу движения. Кроме того, управляющее устройство 180 идентифицирует переднее транспортное средство, расположенное впереди целевой точки, и заднее транспортное средство, расположенное позади целевой точки, как целевое транспортное средство, соответственно, при установке целевой точки между множеством транспортных средств. Если в смежной полосе движения вокруг рассматриваемого транспортного средства движутся три или более других транспортных средств, управляющее устройство 180 вычисляет расстояние между транспортными средствами между каждым транспортным средством, например, идентифицирует другое транспортное средство, расположенное впереди и позади самой широкой области между транспортными средствами, как целевое транспортное средство.
[0026] Будет описана функция установки целевой области. Управляющее устройство 180 устанавливает область возможности смены полосы движения между множеством целевых транспортных средств, идентифицированных функцией определения целевого транспортного средства. Если другое транспортное средство не находится впереди целевой точки, а другое транспортное средство находится только позади целевой точки, зона возможности смены полосы движения устанавливается перед целевым транспортным средством, расположенным позади целевой точки в смежной полосе движения. Кроме того, если целевые транспортные средства расположены впереди и позади целевой точки, соответственно, зона возможности смены полосы движения устанавливается в смежной полосе движения между целевым транспортным средством, расположенным впереди целевой точки, и целевым транспортным средством, расположенным позади целевой точки. Область возможности смены полосы движения включает в себя точку перестроения (целевую точку), в которую перестраивается рассматриваемое транспортное средство. Зона возможности смены транспортного средства содержит по меньшей мере расстояние, равное или большее, чем необходимое расстояние между транспортными средствами для смены полосы движения. Необходимое расстояние между транспортными средствами указывает наименьшую предельную величину расстояния между транспортными средствами, необходимого для выполнения смены полосы движения, и определяется длиной в направлении движения транспортного средства или в направлении вдоль полосы движения. Необходимое расстояние между транспортными средствами определяет достаточное расстояние между транспортными средствами, когда рассматриваемое транспортное средство меняет полосу движения в положении впереди заднего транспортного средства.
[0027] Будет описана функция управления движением. Управляющее устройство 180 управляет движением рассматриваемого транспортного средства с помощью функции управления движением. Управляющее устройство 180 вычисляет скорость транспортного средства как значение управления транспортным средством, указывающее скорость транспортного средства для рассматриваемого транспортного средства, таким образом, чтобы положение рассматриваемого транспортного средства находилось впереди переднего конца другого транспортного средства, на основании состояния транспортного средства для рассматриваемого транспортного средства, полученного с помощью функции получения состояния транспортного средства, и управляет выходным крутящим моментом приводного механизма 160 таким образом, чтобы текущая скорость транспортного средства для рассматриваемого транспортного средства соответствовала значению управления для транспортного средства. Кроме того, управляющее устройство 180 может идентифицировать разметку полосы движения для рассматриваемой полосы движения на основании результата обнаружения группы 110 датчиков и управлять положением движения в направлении ширины транспортного средства для рассматриваемого транспортного средства таким образом, чтобы рассматриваемое транспортное средство двигалось по указанной полосе движения (так называемое управление удержанием полосы движения). Управляющее устройство 180 выполняет рулевое управление для смены полосы движения после приведения в действие указателя поворота. Управляющее устройство 180 управляет исполнительным механизмом рулевого управления таким образом, чтобы рассматриваемое транспортное средство перемещалось с полосы движения, в которой осуществляется движение, в область возможности смены полосы движения, поддерживая текущую скорость транспортного средства для рассматриваемого транспортного средства. Когда перемещение рассматриваемого транспортного средства в область возможности смены полосы движения завершено, управляющее устройство 180 прекращает управление сменой полосы движения.
[0028] Будет описана функция управления указателем поворота. Управляющее устройство 180 начинает приводить в действие указатель поворота рассматриваемого транспортного средства, когда задний конец рассматриваемого транспортного средства находится впереди переднего конца целевого транспортного средства.
[0029] Далее с обращением к фиг. 2 и 3 будет описана последовательность операций управления управляющего устройства 180. Фиг. 2 - блок-схема, показывающая последовательность операций управления управляющего устройства 180. Фиг. 3 - схема, поясняющая ситуацию, в которой рассматриваемое транспортное средство приближается к целевому транспортному средству сзади целевого транспортного средства и выполняет смену полосы движения перед целевым транспортным средством. Фиг. 3 показывает ситуацию перед тем, как рассматриваемое транспортное средство выполняет смену полосы движения. На фиг. 3 направление оси x - это направление ширины транспортного средства, а направление оси y - направление движения транспортного средства. В нижеследующем описании последовательность операций управления будет описана для случая иллюстрации в качестве примера ситуации, в которой рассматриваемое транспортное средство выполняет смену полосы движения в пространстве между множеством других транспортных средств, но другое транспортное средство не обязательно должно быть расположено перед целевой точкой, чтобы она была целью смены полосы движения. Кроме того, процесс управления управляющего устройства 180 может применяться к ситуации, в которой рассматриваемое транспортное средство приближается к целевому транспортному средству сзади целевого транспортного средства и выполняет смену полосы движения впереди целевого транспортного средства.
[0030] Последовательность операций управления, показанная на фиг. 2, выполняется, когда управляющее устройство 180 определяет необходимость смены полосы движения или когда пользователь выполняет управление по смене полосы движения. Управляющее устройство 180 определяет, что необходима смена полосы движения, если маршрут движения рассматриваемого транспортного средства включает в себя точку перестроения, и текущее положение рассматриваемого транспортного средства находится на заданном расстоянии позади точки перестроения. В качестве способа определения необходимости смены полосы движения может использоваться другой способ. Управление от пользователя представляет собой, например, управление переключателем или тому подобное для выполнения режима автоматического управления для выполнения смены полосы движения.
[0031] На этапе S1 управляющее устройство 180 получает данные обнаружения, включая информацию о текущем положении рассматриваемого транспортного средства, от устройства 120 обнаружения положения рассматриваемого транспортного средства. Кроме того, управляющее устройство 180 получает данные обнаружения, включая информацию о скорости транспортного средства, ускорении и тому подобном для рассматриваемого транспортного средства, от группы 110 датчиков. Таким образом, управляющее устройство 180 получает данные обнаружения, включая информацию о состоянии транспортного средства для рассматриваемого транспортного средства. На этапе S2 управляющее устройство 180 получает данные обнаружения множества других транспортных средств, расположенных в окружении рассматриваемого транспортного средства, от группы 110 датчиков. Как показано на фиг. 3, рассматриваемое транспортное средство A движется в положении позади другого транспортного средства Q (заднего транспортного средства). В примере по фиг. 3 рассматриваемое транспортное средство A движется в полосе движения S, в которой осуществляется движение. Управляющее устройство 180 рассматриваемого транспортного средства A указывает другие транспортные средства, движущиеся в смежной полосе движения T. По существу, управляющее устройство 180 при выполнении следующего процесса управления по этапам S3 и далее, получает данные обнаружения, относящиеся к состоянию транспортного средства для рассматриваемого транспортного средства и других транспортных средств, и надлежащим образом использует данные обнаружения в процессе управления, начиная с этапа S3 и далее.
[0032] На этапе S3 управляющее устройство 180 устанавливает целевую точку впереди другого транспортного средства в смежной полосе движения на основании состояния транспортного средства для рассматриваемого транспортного средства и состояния транспортного средства для другого транспортного средства. В примере по фиг. 3, поскольку переднее транспортное средство P и заднее транспортное средство Q имеют наибольшее расстояние между транспортными средствами из четырех других транспортных средств, расположенных в смежной полосе движения, управляющее устройство 180 устанавливает целевую точку m перед задним транспортным средством Q.
[0033] На этапе S4 управляющее устройство 180 определяет другое транспортное средство, расположенное за целевой точкой, как целевое транспортное средство. Управляющее устройство 180 идентифицирует другое транспортное средство, расположенное впереди и позади целевой точки, как целевое транспортное средство при установке целевой точки между множеством других транспортных средств.
[0034] На этапе S5 управляющее устройство 180 вычисляет необходимое расстояние между транспортными средствами на основании состояния транспортного средства для целевого транспортного средства, расположенного впереди целевой точки, состояния транспортного средства для целевого транспортного средства, расположенного за целевой точкой, и состояния транспортного средства для рассматриваемого транспортного средства. В частности, если скорость транспортного средства для рассматриваемого транспортного средства равна или больше скорости транспортного средства для переднего транспортного средства, управляющее устройство 180 вычисляет необходимое расстояние между транспортными средствами (LMLIM) с использованием следующего уравнения (1). Если скорость транспортного средства для рассматриваемого транспортного средства меньше скорости транспортного средства для переднего транспортного средства, управляющее устройство 180 вычисляет необходимое расстояние между транспортными средствами (LMLIM), используя следующее уравнение (2).
[Уравнение 1]
 (1)
(1)
[Уравнение 2]
 (2)
(2)
Следует отметить, что v0 указывает скорость транспортного средства для рассматриваемого транспортного средства, v1 указывает скорость транспортного средства для заднего транспортного средства (целевое транспортное средство сзади), v2 указывает скорость транспортного средства для переднего транспортного средства (целевое транспортное средство впереди), а l указывает общую длину рассматриваемого транспортного средства.
[0035] Вышеприведенное уравнение представляет собой уравнение для определения достаточного расстояния между транспортными средствами, когда рассматриваемое транспортное средство выполняет смену полосы движения впереди заднего транспортного средства, и расстояние между транспортными средствами определяется скоростью транспортного средства, временем между транспортными средствами и временем, необходимым для смены полосы движения. В приведенных выше уравнениях (1) и (2) коэффициент (1,5), умноженный на скорость транспортного средства, представляет время между транспортными средствами. Время, необходимое для смены полосы движения, представляет собой время, необходимое для того, чтобы рассматриваемое транспортное средство достигло целевой точки, с момента начала приведения в действие указателя поворота рассматриваемого транспортного средства. В третьем члене уравнения (1) коэффициент (6), который умножается на значение скорости транспортного средства (v0) для рассматриваемого транспортного средства минус скорость транспортного средства (v2) для переднего транспортного средства (соответствует относительной скорости), представляет время, необходимое для смены полосы движения. Далее, третий член в уравнении (1) представляет собой расстояние между транспортными средствами, которое, как ожидается, уменьшится при смене полосы движения. В уравнении (1), поскольку скорость транспортного средства для рассматриваемого транспортного средства больше скорости транспортного средства для переднего транспортного средства, и расстояние между транспортными средствами между рассматриваемым транспортным средством и передним транспортным средством уменьшается, когда рассматриваемое транспортное средство выполняет смену полосы движения, длина, соответствующая третьему члену, включена в необходимое расстояние между транспортными средствами. С другой стороны, в уравнении (2), поскольку скорость транспортного средства для рассматриваемого транспортного средства меньше скорости транспортного средства для переднего транспортного средства, и расстояние между транспортными средствами между рассматриваемым транспортным средством и передним транспортным средством не уменьшается, когда рассматриваемое транспортное средство выполняет смену полосы движения, длина, соответствующая третьему члену, не включается в необходимое расстояние между транспортными средствами.
[0036] В примере на фиг. 3 управляющее устройство 180 вычисляет необходимое расстояние между транспортными средствами (LMLIM) с использованием приведенного выше уравнения (1) или (2) на основании скорости v0 транспортного средства A для рассматриваемого транспортного средства, скорости транспортного средства v1 для заднего транспортного средства Q, скорости транспортного средства v2 для переднего транспортного средства P и общей длины l рассматриваемого транспортного средства. По существу, если нет переднего транспортного средства и/или заднего транспортного средства, предполагая, что положение транспортного средства бесконечно, можно определить необходимое расстояние между транспортными средствами.
[0037] На этапе S6 управляющее устройство 180 вычисляет расстояние между транспортными средствами между передним транспортным средством и задним транспортным средством на основании положения переднего транспортного средства и положения заднего транспортного средства и сравнивает вычисленное расстояние между транспортными средствами с необходимым расстоянием между транспортными средствами. В примере по фиг. 3 управляющее устройство 180 сравнивает расстояние между транспортными средствами между передним транспортным средством P и задним транспортным средством Q (LM) с необходимым расстоянием между транспортными средствами (LMLIM). Если текущее расстояние между транспортными средствами (LM) равно или больше необходимого расстояния между транспортными средствами (LMLIM), управляющее устройство 180 выполняет процесс управления на этапе S15. Если текущее расстояние между транспортными средствами (LM) меньше необходимого расстояния между транспортными средствами (LMLIM), управляющее устройство 180 выполняет процесс управления на этапе S7.
[0038] Если текущее расстояние между транспортными средствами (LM) меньше необходимого расстояния между транспортными средствами (LMLIM), рассматриваемое транспортное средство снижает скорость транспортного средства вблизи заднего транспортного средства, чтобы информировать заднее транспортное средство о том, что рассматриваемое транспортное средство желает выполнить перестроение впереди заднего транспортного средства. Заднее транспортное средство распознает транспортное средство, замедляющееся в окружении заднего транспортного средства, и замедляется, позволяя рассматриваемому транспортному средству перестроиться в пространство впереди. Расстояние между передним транспортным средством и задним транспортным средством увеличивается, а расстояние между транспортными средствами становится больше, чем необходимое расстояние между транспортными средствами (LMLIM). Это позволяет рассматриваемому транспортному средству выполнить смену полосы движения. Управление замедлением для информирования заднего транспортного средства о намерении перестроиться выполняется, например, в такой ситуации, когда полоса движения, которая будет местом назначения перестроения, перегружена, и планируется перестроение рассматриваемого транспортного средства между входящими в затор транспортными средствами. Управление от этапа S7 до этапа S14, которое будет описано ниже, соответствует управлению для информирования другого транспортного средства о намерении выполнить перестроение.
[0039] Если текущее расстояние между транспортными средствами (LM) меньше необходимого расстояния между транспортными средствами (LMLIM), управляющее устройство 180 определяет, замедляется ли заднее транспортное средство больше, чем рассматриваемое транспортное средство, на этапе S7. В частности, управляющее устройство 180 сравнивает ускорение рассматриваемого транспортного средства с ускорением заднего транспортного средства. Если заднее транспортное средство замедляется, на этапе S8 управляющее устройство 180 вычисляет замедление. Замедление представляет собой ширину скорости транспортного средства, когда скорость транспортного средства уменьшается, и управляющее устройство 180 вычисляет замедление перед снижением скорости транспортного средства для рассматриваемого транспортного средства. Чем больше разность между текущей скоростью транспортного средства и сниженной скоростью автомобиля, тем больше замедление. Управляющее устройство 180 вычисляет разность скоростей транспортного средства для снижения текущей скорости транспортного средства по сравнению со скоростью транспортного средства для заднего транспортного средства в качестве замедления.
[0040] На этапе S9 управляющее устройство 180 сравнивает вычисленное замедление со значением верхнего предела замедления. Значение верхнего предела замедления представляет собой заданное значение и указывается посредством значения верхнего предела диапазона ускорения, которое не влияет на комфорт движения пользователя и тому подобное. Например, если замедление при требуемом замедлении приводит к резкому замедлению и влияет на комфорт движения пользователя, замедление устанавливается в значение, близкое к значению верхнего предела замедления, или значение, превышающее значение верхнего предела замедления. Кроме того, значение верхнего предела замедления может быть значением, соответствующим состоянию транспортного средства для рассматриваемого транспортного средства и/или состоянию транспортного средства для заднего транспортного средства, и может быть значением верхнего предела ускорения, допускающим замедление рассматриваемого транспортного средства. Например, если полоса движения, которая будет целью перестроения, имеет затор и заднее транспортное средство почти остановлено, даже если скорость транспортного средства для рассматриваемого транспортного средства снижается, скорость транспортного средства для рассматриваемого транспортного средства не становится меньше скорости транспортного средства для другого транспортного средства. В таком случае замедление становится больше значения верхнего предела замедления, и даже если скорость транспортного средства для рассматриваемого транспортного средства уменьшается в соответствии с замедлением, скорость транспортного средства для рассматриваемого транспортного средства не становится меньше скорости транспортного средства для другого транспортного средства. Например, управляющее устройство 180 вычисляет значение верхнего предела замедления таким образом, что чем выше скорость транспортного средства для рассматриваемого транспортного средства, чем скорость транспортного средства заднего транспортного средства, тем больше будет значение верхнего предела замедления.
[0041] Если вычисленное замедление превышает значение верхнего предела замедления, даже если рассматриваемое транспортное средство замедляется, скорость транспортного средства для рассматриваемого транспортного средства не становится ниже скорости транспортного средства для другого транспортного средства. Управляющее устройство 180 определяет, что расстояние между транспортными средствами, включая целевую точку (расстояние между транспортными средствами между передним транспортным средством и задним транспортным средством), не становится короче необходимого расстояния между транспортными средствами, даже если транспортное средство замедляется, и заканчивается последовательность операций управления, показанная на фиг. 2.
[0042] Если вычисленное замедление равно или меньше значения верхнего предела замедления, на этапе S10 управляющее устройство 180 выполняет управление замедлением для уменьшения скорости транспортного средства для рассматриваемого транспортного средства на основании вычисленного замедления. Управление замедлением в процессе управления на этапе S10 не должно выполняться в этот момент времени, и оно может выполняться в процессе управления на этапе S12. На этапе S11 управляющее устройство 180 определяет, находится ли задний конец рассматриваемого транспортного средства впереди переднего конца заднего транспортного средства. Приведение в действие указателя 170 поворота начинается на этапе S26, который будет описан ниже. Следовательно, процесс управления на этапе S16 определяет, находится ли рассматриваемое транспортное средство в положении, в котором водитель заднего транспортного средства может визуально распознать приведение в действие указателя 170 поворота рассматриваемого транспортного средства. Если задний конец рассматриваемого транспортного средства не находится впереди переднего конца заднего транспортного средства, управляющее устройство 180 выполняет обработку управления на этапе S7. Если задний конец рассматриваемого транспортного средства находится впереди переднего конца заднего транспортного средства, управляющее устройство 180 выполняет процесс управления на этапе S12.
[0043] На этапе S12 управляющее устройство 180 выполняет управление замедлением таким образом, что скорость транспортного средства для рассматриваемого транспортного средства ниже, чем текущая скорость транспортного средства. На этапе S13 управляющее устройство 180 вычисляет необходимое расстояние между транспортными средствами. Способ вычисления необходимого расстояния между транспортными средствами является тем же самым, как и способ вычисления на этапе S5. В примере по фиг. 3, предположим, что водитель заднего транспортного средства Q замечает, что рассматриваемое транспортное средство A замедляется в положении впереди заднего транспортного средства Q и снижает скорость транспортного средства. В это время, как представлено уравнением (1), поскольку скорость v1 транспортного средства для заднего транспортного средства Q уменьшается, необходимое расстояние между транспортными средствами (LMLIM) сокращается.
[0044] На этапе S14 управляющее устройство 180 вычисляет расстояние между транспортными средствами между передним транспортным средством и задним транспортным средством на основании положения переднего транспортного средства и положения заднего транспортного средства и сравнивает вычисленное расстояние между транспортными средствами с необходимым расстоянием между транспортными средствами (LMLIM). Если текущее расстояние между транспортными средствами (LM) равно или больше необходимого расстояния между транспортными средствами (LMLIM), управляющее устройство 180 выполняет процесс управления на этапе S15. Если текущее расстояние между транспортными средствами (LM) равно или больше необходимого расстояния между транспортными средствами (LMLIM), управляющее устройство 180 выполняет процесс управления на этапе S18. Если текущее расстояние между транспортными средствами (LM) меньше необходимого расстояния между транспортными средствами (LMLIM), управляющее устройство 180 определяет, что расстояние между транспортными средствами, включающее в себя целевую точку, не превышает необходимое расстояние между транспортными средствами, и завершает последовательность операций управления, показанную на фиг. 2.
[0045] В процессе управления на этапе S6 при определении того, что текущее расстояние между транспортными средствами (LM) равно или больше необходимого расстояния между транспортными средствами (LMLIM), управляющее устройство 180 устанавливает скорость транспортного средства для рассматриваемого транспортного средства для обгона заднего транспортного средства и управляет приводным механизмом 160 таким образом, чтобы текущая скорость транспортного средства соответствовала установленной скорости транспортного средства (управление скоростью транспортного средства).
[0046] На этапе S16 управляющее устройство 180 определяет, находится ли задний конец рассматриваемого транспортного средства впереди переднего конца заднего транспортного средства. Приведение в действие указателя 170 поворота начинается на этапе S26, который будет описан ниже. Следовательно, процесс управления на этапе S16 определяет, находится ли рассматриваемое транспортное средство в положении, в котором водитель заднего транспортного средства может визуально распознать приведение в действие указателя 170 поворота рассматриваемого транспортного средства. Если задний конец рассматриваемого транспортного средства не находится впереди переднего конца заднего транспортного средства, управляющее устройство 180 выполняет процесс управления на этапе S15. Если задний конец рассматриваемого транспортного средства находится впереди переднего конца заднего транспортного средства, управляющее устройство 180 выполняет процесс управления на этапе S17.
[0047] На этапе S17 управляющее устройство 180 выполняет управление замедлением таким образом, чтобы скорость транспортного средства для рассматриваемого транспортного средства была меньше текущей скорости транспортного средства. Управление замедлением - это управление для управления скоростью транспортного средства, например, в заданном диапазоне замедления, таким образом, чтобы положение рассматриваемого транспортного средства находилось между передним транспортным средством и задним транспортным средством в направлении движения рассматриваемого транспортного средства. Это управление замедлением также служит для информирования заднего транспортного средства о намерении выполнить перестроение. То есть водитель заднего транспортного средства понимает намерение перестроения, распознавая замедляющееся транспортное средство в положении впереди. Таким образом можно сообщить заднему транспортному средству о намерении перестроения рассматриваемого транспортного средства. По существу, управление замедлением не обязательно должно выполняться в тот момент времени, когда задний конец рассматриваемого транспортного средства находится впереди переднего конца заднего транспортного средства, но оно может выполняться после того момента времени, когда задний конец рассматриваемого транспортного средства находится впереди переднего конца заднего транспортного средства. Например, управляющее устройство 180 может выполнять управление замедлением, когда положение рассматриваемого транспортного средства находится в средней точке между передним транспортным средством и задним транспортным средством в направлении движения рассматриваемого транспортного средства.
[0048] На этапе S18 управляющее устройство 180 вычисляет ускорение рассматриваемого транспортного средства и ускорение заднего транспортного средства и определяет, является ли относительное ускорение рассматриваемого транспортного средства относительно заднего транспортного средства отрицательным, путем сравнения вычисленного ускорения. Ускорение заднего транспортного средства может быть вычислено путем измерения ускорения заднего транспортного средства, или оно может быть вычислено, предполагая, что заднее транспортное средство движется с постоянной скоростью. Если относительное ускорение является отрицательным, рассматриваемое транспортное средство может с легкостью информировать водителя заднего транспортного средства, например, о намерении перестроения рассматриваемого транспортного средства, поскольку рассматриваемое транспортное средство замедляется относительно заднего транспортного средства, даже если заднее транспортное средство замедляется. По существу, если расстояние между транспортными средствами между передним транспортным средством и задним транспортным средством достаточно велико, процесс управления на этапе S18 может быть пропущен.
[0049] Если относительное ускорение является положительным или нулевым, на этапе S19 управляющее устройство 180 вычисляет замедление. Обработка вычисления замедления является такой же, как и на этапе S8. На этапе S20 управляющее устройство 180 сравнивает вычисленное замедление со значением верхнего предела замедления и определяет, является ли вычисленное замедление равным или меньшим, чем значение верхнего предела замедления. Обработка определения на этапе S20 является такой же, как и на этапе S9. Если вычисленное замедление равно или меньше значения верхнего предела замедления, управляющее устройство 180 выполняет процесс управления на этапе S17. То есть, если относительное ускорение является положительным или нулевым в процессе определения на этапе S18, процесс возвращается к процессу управления на этапе S17. Посредством этого контура управления ускорение рассматриваемого транспортного средства снижается, если ускорение рассматриваемого транспортного средства больше ускорения заднего транспортного средства. С другой стороны, если вычисленное замедление больше значения верхнего предела замедления, управляющее устройство 180 определяет, что расстояние между транспортными средствами, включающее в себя целевую точку, не становится больше необходимого расстояния между транспортными средствами, даже если рассматриваемое транспортное средство замедляется, и завершает последовательность операций управления, показанную на фиг. 2.
[0050] При определении на этапе S18, если определено, что относительное ускорение является отрицательным, на этапе S21 управляющее устройство 180 прогнозирует взаимное расположение между рассматриваемым транспортным средством и передним транспортным средством по истечении заданного времени с использованием скорости транспортного средства для переднего транспортного средства, расстояние от рассматриваемого транспортного средства до переднего транспортного средства, скорость транспортного средства для рассматриваемого транспортного средства и ускорение рассматриваемого транспортного средства. В частности, управляющее устройство 180 вычисляет изменение скорости транспортного средства от настоящего времени до истечения заданного периода времени, предполагая, что текущее ускорение переднего транспортного средства остается постоянным с настоящего момента времени до истечения заданного времени. Аналогичным образом, управляющее устройство 180 вычисляет изменение скорости транспортного средства с настоящего момента времени до истечения заданного времени, предполагая, что текущее ускорение рассматриваемого транспортного средства остается постоянным с настоящего момента времени до истечения заданного времени. Затем, сравнивая изменения скорости транспортного средства для рассматриваемого транспортного средства и переднего транспортного средства с настоящего момента времени до истечения заданного времени, управляющее устройство 180 вычисляет время, в которое скорость транспортного средства для рассматриваемого транспортного средства станет меньше скорости транспортного средства для переднего транспортного средства. Если вычислено время, в которое скорость транспортного средства для рассматриваемого транспортного средства станет меньше скорости транспортного средства для переднего транспортного средства, рассматриваемое транспортное средство может обогнать переднее транспортное средство. Таким образом управляющее устройство 180 прогнозирует взаимное расположение между передним транспортным средством и рассматриваемым транспортным средством по истечении заданного периода времени на основании изменения скорости транспортного средства для рассматриваемого транспортного средства и переднего транспортного средства. По существу, управляющее устройство 180 может прогнозировать взаимное расположение между передним транспортным средством и рассматриваемым транспортным средством по истечении заданного периода времени путём вычисления будущего положения переднего транспортного средства и будущего положения заднего транспортного средства. Управляющее устройство 180 вычисляет каждое из расстояния перемещения рассматриваемого транспортного средства и другого транспортного средства, предполагая, что текущая скорость транспортного средства и текущее ускорение остаются постоянными с настоящего момента времени до истечения заданного времени. Затем управления устройство 180 вычисляет положение переднего транспортного средства по истечении заданного времени, добавляя вычисленное расстояние перемещения к текущему положению переднего транспортного средства, и вычисляет положение рассматриваемого транспортного средства по истечении заданного времени путём сложения вычисленного расстояния перемещения до текущего положения рассматриваемого транспортного средства.
[0051] На этапе S22 управляющее устройство 180 определяет, обгоняет ли рассматриваемое транспортное средство переднее транспортное средство, на основании результата прогнозирования, полученного посредством обработки управления на этапе S21. В частности, управляющее устройство 180 определяет, находится ли задний конец рассматриваемого транспортного средства по истечении заданного периода времени впереди или сзади заднего конца переднего транспортного средства по истечении заданного периода времени, путём использования взаимного расположения между рассматриваемым транспортным средством и передним транспортным средством, которое спрогнозировано посредством обработки управления на этапе S21. При прогнозировании того, что задний конец рассматриваемого транспортного средства по истечении заданного периода времени будет находиться впереди заднего конца переднего транспортного средства по истечении заданного периода времени, управляющее устройство 180 определяет, что рассматриваемое транспортное средство обгоняет переднее транспортное средство. С другой стороны, при прогнозировании того, что задний конец рассматриваемого транспортного средства по истечении заданного периода времени будет находиться сзади заднего конца переднего транспортного средства по истечении заданного периода времени, управляющее устройство 180 определяет, что рассматриваемое транспортное средство не обгоняет переднее транспортное средство. При определении того, что рассматриваемое транспортное средство обгоняет переднее транспортное средство, управляющее устройство 180 завершает последовательность операций управления, показанную на фиг. 2.
[0052] При определении того, что рассматриваемое транспортное средство не обгоняет переднее транспортное средство, на этапе S23 управляющее устройство 180 вычисляет необходимое расстояние между транспортными средствами. Способ вычисления необходимого расстояния между транспортными средствами является таким же, как и способ вычисления на этапе S5. На этапе S24 управляющее устройство 180 определяет, является ли расстояние между транспортными средствами между передним и задним транспортными средствами равным или большим, чем необходимое расстояние между транспортными средствами (LMLIM). Обработка определения на этапе S24 является такой же, как и обработка определения на этапе S6. Если текущее расстояние между транспортными средствами (LM) меньше необходимого расстояния между транспортными средствами (LMLIM), управляющее устройство 180 определяет, что расстояние между транспортными средствами, включающее в себя целевую точку, не меньше необходимого расстояния между транспортными средствами, и завершает последовательность операций управления, показанную на фиг. 2. Для обработки управления на этапах S23 и 24, поскольку существует вероятность того, что расстояние между транспортными средствами и необходимое расстояние между транспортными средствами могут измениться из-за изменения состояния транспортного средства для рассматриваемого транспортного средства и другого транспортного средства во время управления скоростью транспортного средства как описано выше, управляющее устройство 180 выполняет обработку управления на этапах S23 и 24.
[0053] На этапе S25 управляющее устройство 180 определяет, следует ли начинать приводить в действие указатель 170 поворота, на основании состояния транспортного средства для рассматриваемого транспортного средства и состояния транспортного средства для заднего транспортного средства. В частности, управляющее устройство 180 вычисляет расстояние распознавания, на котором находящееся сзади транспортное средство может распознать приведение в действие указателя 170 поворота. Если скорость заднего транспортного средства высока, водитель заднего транспортного средства смотрит вдаль, поэтому даже если указатель поворота начинает мигать, когда рассматриваемое транспортное средство находится вблизи заднего транспортного средства, водитель заднего транспортного средства может не распознать приведение в действие указателя поворота. Следовательно, управляющее устройство 180 вычисляет расстояние распознавания таким образом, что чем выше скорость транспортного средства для заднего транспортного средства, тем больше расстояние распознавания. Затем управляющее устройство 180 сравнивает расстояние между транспортными средствами от рассматриваемого транспортного средства до заднего транспортного средства с вычисленным расстоянием распознавания и определяет начало приведения в действие указателя 170 поворота, когда расстояние между транспортными средствами равно или больше расстояния распознавания. С другой стороны, когда расстояние между транспортными средствами меньше расстояния распознавания, управляющее устройство 180 определяет, что не следует начинать приведение в действие указателя 170 поворота и выполняет процесс управления на этапе S23. По существу, управляющее устройство 180 может вычислять расстояние распознавания таким образом, что чем больше расстояние распознавания, тем выше относительная скорость рассматриваемого транспортного средства относительно заднего транспортного средства. Если относительная скорость рассматриваемого транспортного средства относительно заднего транспортного средства высока, рассматриваемое транспортное средство выполняет перестроение в смежную полосу движения в положении, относительно далеком от заднего транспортного средства. Следовательно, управляющее устройство 180 может вычислить расстояние распознавания таким образом, чтобы водитель заднего транспортного средства мог распознать приведение в действие указателя 170 поворота в отдаленном положении.
[0054] На этапе S26 управляющее устройство 180 начинает приводить в действие указатель 170 поворота. На этапе 27 управляющее устройство 180 управляет рулевым управлением, поддерживая текущую скорость транспортного средства для рассматриваемого транспортного средства, чтобы переместить рассматриваемое транспортное средство из рассматриваемой полосы движения в смежную полосу движения таким образом, что рассматриваемое транспортное средство входит в зону возможности смены полосы движения. Затем, после смены полосы движения, управляющее устройство 180 завершает последовательность операций управления, показанную на фиг.2.
[0055] Как описано выше, устройство управления транспортным средством согласно настоящему варианту осуществления включает в себя получение данных обнаружения другого транспортного средства, движущегося в смежной полосе движения, установку в смежной полосе движения целевой точки для смены полосы движения рассматриваемым транспортным средством с полосы движения, по которой осуществляется движение, на соседнюю полосу на основании взаимного расположения между транспортным средством и другим транспортным средством, указание другого транспортного средства, которое находится за целевой точкой, в качестве заднего транспортного средства, и начало приведения в действие указателя поворота рассматриваемого транспортного средства, когда задний конец рассматриваемого транспортного средства находится впереди переднего конца целевого транспортного средства. Таким образом, начало приведения в действие указателя поворота в момент времени, в который пользователь заднего транспортного средства может визуально распознать приведение в действие указателя поворота, позволяет рассматриваемому транспортному средству с легкостью информировать другое транспортное средство о намерении перестроения рассматриваемого транспортного средства.
[0056] Кроме того, устройство управления транспортным средством согласно настоящему варианту осуществления включает в себя вычисление на основании состояния транспортного средства для заднего транспортного средства и состояния транспортного средства для рассматриваемого транспортного средства расстояния распознавания, указывающего расстояние, на котором пользователь заднего транспортного средства распознает приведение в действие указателя поворота, и начало приведения в действие указателя поворота рассматриваемого транспортного средства, когда расстояние между транспортными средствами между рассматриваемым транспортным средством и задним транспортным средством равно или больше расстояния распознавания. В результате указатель поворота не приводится в действие в состоянии, в котором рассматриваемое транспортное средство находится близко к заднему транспортному средству. Это предотвращает появление беспокойства у пользователя заднего транспортного средства, и позволяет рассматриваемому транспортному средству информировать другое транспортное средство о намерении перестроения рассматриваемого транспортного средства.
[0057] Кроме того, устройство управления транспортным средством согласно настоящему варианту осуществления включает в себя начало приведения в действие указателя поворота рассматриваемого транспортного средства, когда относительное ускорение рассматриваемого транспортного средства относительно заднего транспортного средства является отрицательным. Таким образом, поскольку водитель заднего транспортного средства может распознать, что рассматриваемое транспортное средство изменяет скорость транспортного средства для смены полосы движения, рассматриваемое транспортное средство может с легкостью информировать другое транспортное средство о намерении перестроения рассматриваемого транспортного средства.
[0058] Кроме того, устройство управления транспортным средством согласно настоящему варианту осуществления включает в себя уменьшение ускорения рассматриваемого транспортного средства, когда ускорение рассматриваемого транспортного средства больше ускорения заднего транспортного средства, и начало приведения в действие указателя поворота рассматриваемого транспортного средства после ускорения рассматриваемого транспортного средства. Таким образом, поскольку водитель заднего транспортного средства может распознавать, что рассматриваемое транспортное средство приближается к положению впереди заднего транспортного средства, путем изменения скорости для смены полосы движения, рассматриваемое транспортное средство может с легкостью информировать другое транспортное средство о намерении перестроения рассматриваемого транспортного средства.
[0059] Кроме того, устройство управления транспортным средством согласно настоящему варианту осуществления включает в себя прогнозирование взаимного расположения между передним транспортным средством и рассматриваемым транспортным средством по истечении заданного периода времени на основании состояния транспортного средства для переднего транспортного средства и состояния транспортного средства для рассматриваемого транспортного средства, определение, находится ли задний конец рассматриваемого транспортного средства по истечении заданного периода времени сзади заднего конца переднего транспортного средства по истечении заданного периода времени, и начало приведения в действие указателя 170 поворота рассматриваемого транспортного средства при определении на основании прогнозируемого взаимного расположения, что задний конец рассматриваемого транспортного средства в заданный период времени находится сзади заднего конца переднего транспортного средства по истечении заданного периода времени. Таким образом, поскольку приведение в действие указателя 170 поворота начинается в состоянии, когда задний конец транспортного средства находится сзади заднего конца переднего транспортного средства, рассматриваемое транспортное средство может с легкостью информировать другое транспортное средство о намерении перестроения рассматриваемого транспортного средства.
[0060] В процессе управления на этапе S21 и этапе S22 устройство управления транспортным средством согласно настоящему варианту осуществления прогнозирует взаимное расположение между рассматриваемым транспортным средством и передним транспортным средством по истечении заданного времени для определения, обгоняет ли рассматриваемое транспортное средство переднее транспортное средство, но результат прогнозирования взаимного расположения может использоваться для другого определения. Например, управляющее устройство 180 сравнивает расстояние от переднего конца рассматриваемого транспортного средства по истечении заданного времени до положения другого транспортного средства по истечении заданного времени с заданной пороговой величиной расстояния на основании взаимного расположения между рассматриваемым транспортным средством и передним транспортным средством по истечении заданного времени. Заданная пороговая величина расстояния представляет собой верхний предел расстояния для того, чтобы заднее транспортное средство с легкостью определило намерение перестроения рассматриваемого транспортного средства, и определяется взаимным расположением или разностью скоростей транспортного средства между рассматриваемым транспортным средством и задним транспортным средством.
[0061] Например, как в примере по фиг. 4, рассматриваемое транспортное средство движется по полосе движения S, в которой осуществляется движение, а переднее транспортное средство P и заднее транспортное средство Q движутся по смежной полосе движения T. Расстояние между транспортными средствами (LM) между передним транспортным средством P и задним транспортным средством Q является достаточно большим. В таком состоянии, когда рассматриваемое транспортное средство обгоняет заднее транспортное средство Q и выполняет смену полосы движения в положении, близком к переднему транспортному средству P, существует вероятность того, что водитель заднего транспортного средства Q определит, что рассматриваемое транспортное средство не намерено выполнить перестроение перед задним транспортным средством Q, на основании состояния, в котором рассматриваемое транспортное средство обгоняет заднее транспортное средство Q и движется к переднему транспортному средству P. Чтобы предотвратить такое ошибочное распознавание, управляющее устройство 180, используя взаимное расположение между рассматриваемым транспортным средством и передним транспортным средством P, прогнозируемое посредством процесса управления на этапе S21, определяет, является ли расстояние от переднего конца рассматриваемого транспортного средства по истечении заданного периода времени до заднего конца другого транспортного средства по истечении заданного периода времени равным или большим, чем заданная пороговая величина расстояния. При определении того, что расстояние от переднего конца рассматриваемого транспортного средства по истечении заданного периода времени до заднего конца переднего транспортного средства P по истечении заданного периода времени равно или больше, чем заданная пороговая величина расстояния, управляющее устройство 180 начинает приводить в действие указатель поворота рассматриваемого транспортного средства. Кроме того, управляющее устройство 180 не начинает приводить в действие указатель поворота рассматриваемого транспортного средства, когда расстояние от переднего конца рассматриваемого транспортного средства по истечении заданного периода времени до заднего конца переднего транспортного средства по истечении заданного периода времени меньше заданной пороговой величины расстояния.
[0062] Таким образом, устройство управления транспортным средством согласно настоящему варианту осуществления включает в себя прогнозирование взаимного расположения между передним транспортным средством и рассматриваемым транспортным средством по истечении заданного периода времени на основании состояния транспортного средства для переднего транспортного средства и состояния транспортного средства для рассматриваемого транспортного средства, определение, является ли расстояние от переднего конца рассматриваемого транспортного средства по истечении заданного периода времени до заднего конца переднего транспортного средства по истечении заданного периода времени равным или большим, чем заданная пороговая величина расстояния, и начало приведения в действие указателя поворота рассматриваемого транспортного средства при определении того, что расстояние от переднего конца рассматриваемого транспортного средства по истечении заданного периода времени до заднего конца переднего транспортного средства по истечении заданного периода времени равно или больше заданной пороговой величины расстояния. Например, в состоянии, когда расстояние между транспортными средствами для множества транспортных средств является большим, рассматриваемое транспортное средство, сохраняя расстояние между транспортными средствами по отношению к переднему транспортному средству, начинает приводить в действие указатель 170 поворота в момент времени, когда рассматриваемое транспортное средство может с легкостью информировать заднее транспортное средство о намерении выполнить перестроение. Таким образом рассматриваемое транспортное средство может с легкостью информировать другое транспортное средство о намерении перестроения рассматриваемого транспортного средства.
[ПОЯСНЕНИЕ УСЛОВНЫХ ОБОЗНАЧЕНИЙ]
[0063] 100... Устройство управления транспортным средством
110... Группа датчиков
120... Устройство обнаружения положения транспортного средства
130... Картографическая база данных
140... Система навигации
150... Устройство управления приводом
160... Приводной механизм
170... Указатель поворота
180... Управляющее устройство.
Изобретение относится к способу управления транспортным средством. Способ управления транспортным средством содержит этапы, на которых получают от датчика для обнаружения состояния окружения рассматриваемого транспортного средства данные обнаружения другого транспортного средства, движущегося в смежной полосе движения, устанавливают в смежной полосе движения целевую точку для смены полосы движения с полосы движения, в которой осуществляется движение, на смежную полосу движения для рассматриваемого транспортного средства на основании взаимного расположения между рассматриваемым транспортным средством и другим транспортным средством. При этом указывают другое транспортное средство, которое находится позади целевой точки, как заднее транспортное средство, управляют скоростью транспортного средства для рассматриваемого транспортного средства таким образом, чтобы рассматриваемое транспортное средство переместилось вперед от заднего транспортного средства и начинают приводить в действие указатель поворота рассматриваемого транспортного средства, когда рассматриваемое транспортное средство замедляется относительно заднего транспортного средства и задний конец рассматриваемого транспортного средства находится впереди переднего конца заднего транспортного средства. Достигается своевременное информирование другого транспортного средства о намерении перестроения. 2 н. и 6 з.п. ф-лы, 4 ил.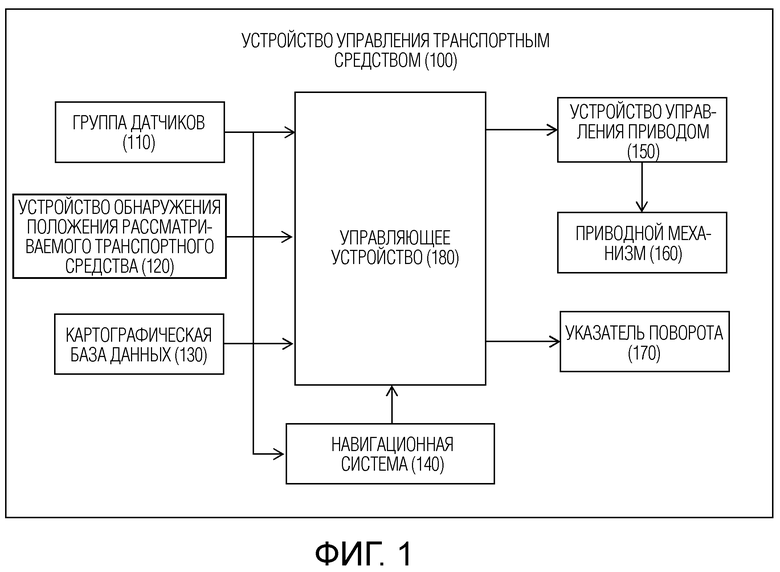
1. Способ управления транспортным средством, выполняемый процессором для управления рассматриваемым транспортным средством, содержащий этапы, на которых:
получают от датчика для обнаружения состояния окружения рассматриваемого транспортного средства данные обнаружения другого транспортного средства, движущегося в смежной полосе движения, смежной с полосой движения, в которой осуществляется движение, по которой движется рассматриваемое транспортное средство;
устанавливают в смежной полосе движения целевую точку для смены полосы движения с полосы движения, в которой осуществляется движение, на смежную полосу движения для рассматриваемого транспортного средства на основании взаимного расположения между рассматриваемым транспортным средством и другим транспортным средством;
указывают другое транспортное средство, которое находится позади целевой точки, как заднее транспортное средство;
управляют скоростью транспортного средства для рассматриваемого транспортного средства таким образом, чтобы рассматриваемое транспортное средство переместилось вперед от заднего транспортного средства; и
начинают приводить в действие указатель поворота рассматриваемого транспортного средства, когда рассматриваемое транспортное средство замедляется относительно заднего транспортного средства и задний конец рассматриваемого транспортного средства находится впереди переднего конца заднего транспортного средства после того, как рассматриваемое транспортное средство переместилось вперед от заднего транспортного средства.
2. Способ управления транспортным средством по п.1, содержащий этапы, на которых:
вычисляют расстояние распознавания, указывающее расстояние, на котором пользователь заднего транспортного средства может распознать приведение в действие указателя поворота таким образом, что, чем выше скорость транспортного средства для заднего транспортного средства, или чем выше относительная скорость рассматриваемого транспортного средства относительно заднего транспортного средства, тем больше расстояние распознавания; и
начинают приводить в действие указатель поворота рассматриваемого транспортного средства, когда расстояние между транспортными средствами между рассматриваемым транспортным средством и задним транспортным средством равно или больше расстояния распознавания.
3. Способ управления транспортным средством по п.1 или 2, содержащий этап, на котором:
начинают приводить в действие указатель поворота рассматриваемого транспортного средства, когда относительное ускорение рассматриваемого транспортного средства относительно заднего транспортного средства является отрицательным.
4. Способ управления транспортным средством по любому из пп.1-3, содержащий этапы, на которых:
уменьшают ускорение рассматриваемого транспортного средства, если ускорение рассматриваемого транспортного средства больше, чем ускорение заднего транспортного средства; и
начинают приводить в действие указатель поворота рассматриваемого транспортного средства после уменьшения ускорения рассматриваемого транспортного средства.
5. Способ управления транспортным средством по п.1, содержащий этапы, на которых:
указывают другое транспортное средство, расположенное впереди целевой точки, как переднее транспортное средство;
прогнозируют взаимное расположение между передним транспортным средством и рассматриваемым транспортным средством по истечении заданного периода времени на основании состояния транспортного средства для переднего транспортного средства и состояния транспортного средства для рассматриваемого транспортного средства;
определяют, находится ли задний конец рассматриваемого транспортного средства по истечении заданного периода времени сзади заднего конца переднего транспортного средства по истечении заданного периода времени; и
начинают приводить в действие указатель поворота рассматриваемого транспортного средства при определении, что задний конец рассматриваемого транспортного средства по истечении заданного периода времени находится сзади заднего конца переднего транспортного средства по истечении заданного периода времени.
6. Способ управления транспортным средством по п.1, содержащий этапы, на которых:
указывают другое транспортное средство, расположенное впереди целевой точки, как переднее транспортное средство;
прогнозируют взаимное расположение между передним транспортным средством и рассматриваемым транспортным средством по истечении заданного периода времени на основании состояния транспортного средства для переднего транспортного средства и состояния транспортного средства для рассматриваемого транспортного средства;
определяют, является ли расстояние от переднего конца рассматриваемого транспортного средства по истечении заданного периода времени до заднего конца переднего транспортного средства по истечении заданного периода времени равным или большим, чем заданная пороговая величина расстояния; и
начинают приводить в действие указатель поворота рассматриваемого транспортного средства при определении, что расстояние от переднего конца рассматриваемого транспортного средства по истечении заданного периода времени до заднего конца переднего транспортного средства по истечении заданного периода времени равно или больше, чем заданная пороговая величина расстояния.
7. Способ управления транспортным средством по п.1 или 2, содержащий этапы, на которых:
определяют, является ли относительное ускорение рассматриваемого транспортного средства относительно заднего транспортного средства отрицательным, и находится ли задний конец рассматриваемого транспортного средства впереди переднего конца заднего транспортного средства после того, как рассматриваемое транспортное средство переместилось вперед от заднего транспортного средства; и
начинают приведение в действие указателя поворота рассматриваемого транспортного средства, если определение того, что относительное ускорение рассматриваемого транспортного средства относительно заднего транспортного средства является отрицательным, и задний конец рассматриваемого транспортного средства находится впереди переднего конца заднего транспортного средства.
8. Устройство управления транспортным средством, содержащее:
датчик для обнаружения состояния окружения рассматриваемого транспортного средства; и
управляющее устройство для управления рассматриваемым транспортным средством, при этом
датчик обнаруживает другое транспортное средство, движущееся в смежной полосе движения, смежной с полосой движения, в которой осуществляется движение, по которой движется рассматриваемое транспортное средство; и
устройство управления выполнено с возможностью:
установки в смежной полосе движения целевой точки для смены полосы движения рассматриваемым транспортным средством с полосы движения, в которой осуществляется движение, на смежную полосу движения на основании взаимного расположения между рассматриваемым транспортным средством и другим транспортным средством;
указания другого транспортного средства, расположенного сзади целевой точки, как заднего транспортного средства;
управления скоростью транспортного средства для рассматриваемого транспортного средства таким образом, чтобы рассматриваемое транспортное средство переместилось вперед от заднего транспортного средства; и
начала приведения в действие указателя поворота рассматриваемого транспортного средства, когда рассматриваемое транспортное средство замедляется относительно заднего транспортного средства и задний конец рассматриваемого транспортного средства находится впереди переднего конца заднего транспортного средства после того, как рассматриваемое транспортное средство переместилось вперед от заднего транспортного средства.
| US 9475491 B1, 08.06.2016 | |||
| JP 6221569 B2, 01.11.2017 | |||
| WO 2017159509 A1, 21.09.2017 | |||
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2659670C1 |

