ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе активной подвески транспортного средства и способу управления системой активной подвески.
УРОВЕНЬ ТЕХНИКИ
Транспортные средства могут быть оснащены усовершенствованной системой предупреждения водителя. Усовершенствованная система предупреждения водителя может обеспечивать водителю транспортного средства уведомление или предупреждение, если усовершенствованная система предупреждения водителя обнаружит потенциальную угрозу безопасности. Эти потенциальные угрозы безопасности могут включать в себя присутствие других транспортных средств вблизи транспортного средства, уход из полосы движения и избежание столкновения. Усовершенствованная система предупреждения водителя может выдавать слуховую, зрительную или тактильную обратную связь, чтобы обеспечить водителю транспортного средства предупреждение до встречи с потенциальной угрозой безопасности, чтобы обеспечить водителю достаточное время для реагирования на встречу с потенциальной угрозой безопасности, избежания её или уменьшения её влияния.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Предложена система активной подвески транспортного средства. Система активной подвески транспортного средства может включать в себя исполнительный механизм подвески и контроллер. Исполнительный механизм подвески может быть соединен при функционировании с кузовом и колесным узлом. Контроллер может быть запрограммирован для категоризации объекта в одну из множества заданных категорий в ответ на обнаружение объекта датчиком обнаружения объекта, когда скорость транспортного средства выше пороговой скорости. Контроллер дополнительно может быть запрограммирован для приведения в действие исполнительного механизма подвески согласно заданному профилю приведения в действие, связанному с одной из заданных категорий.
Транспортное средство может включать в себя исполнительный механизм подвески и контроллер. Контроллер может быть запрограммирован таким образом, чтобы в ответ на обнаружение объекта впереди транспортного средства и идентификацию типа объекта контроллер мог приводить в действие исполнительный механизм подвески для вызова вибрационной сигнатуры в транспортном средстве. Вибрационная сигнатура может вызываться в транспортном средстве согласно типу объекта таким образом, чтобы различные идентифицированные типы объекта приводили к различной вибрационной сигнатуре.
Предложен способ управления системой активной подвески транспортного средства. Способ может включать в себя обнаружение объекта в пределах заданного расстояния от транспортного средства и категоризацию объекта отнесением к одной из множества заданных категорий. Система активной подвески может приводиться в действие для вызова вибрационной сигнатуры в транспортном средстве согласно заданному профилю приведения в действие, относящемуся к одной из заданных категорий и скорости транспортного средства, до встречи с объектом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
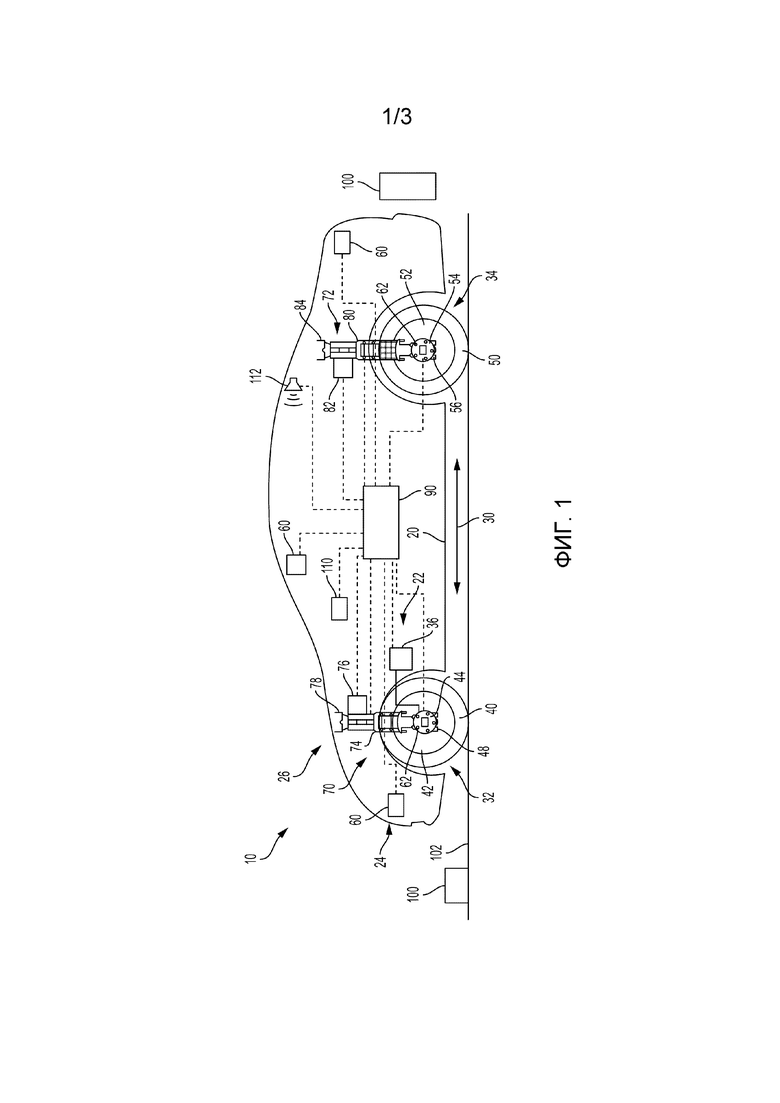
Фиг. 1 - схематичное представление транспортного средства, имеющего систему активной подвески.
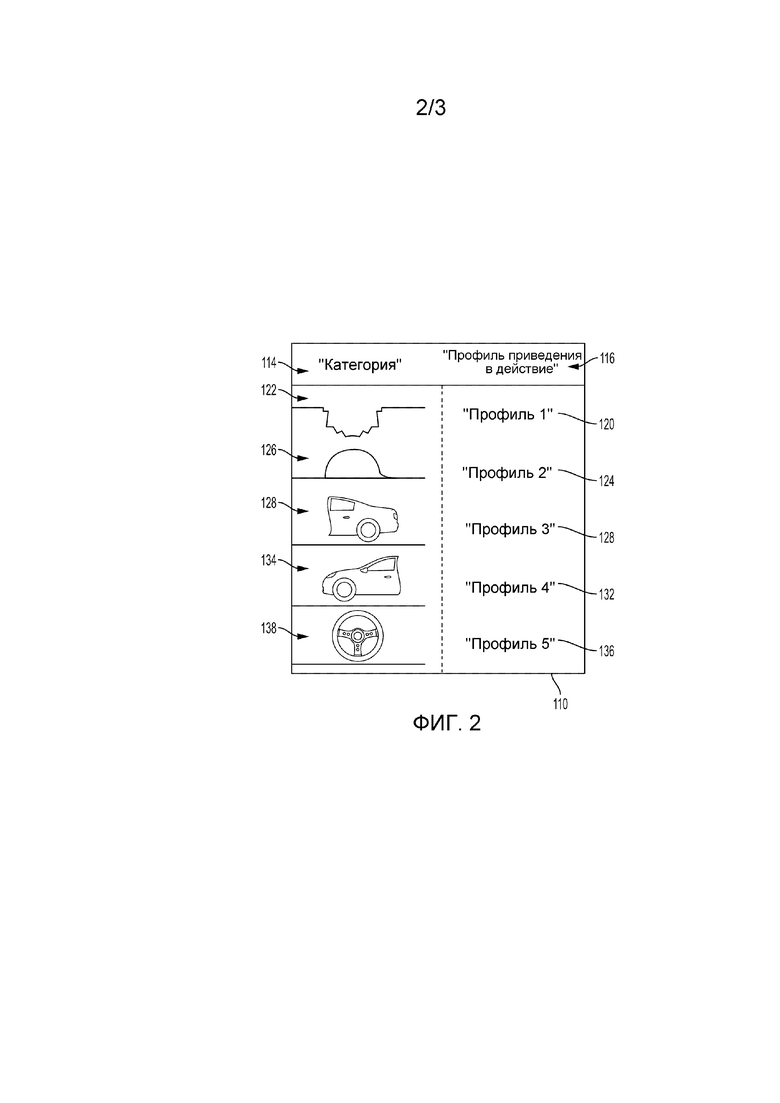
Фиг. 2 - примерное отображение пользовательского интерфейса.
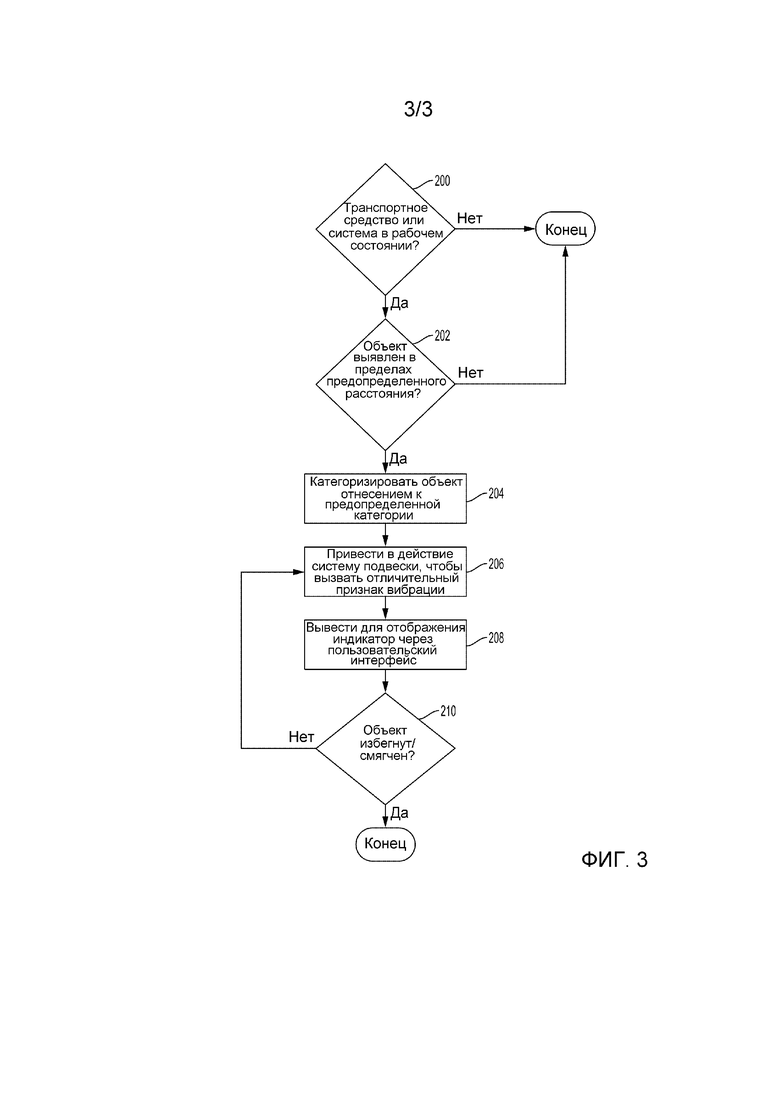
Фиг. 3 - блок-схема, описывающая способ управления системой активной подвески транспортного средства.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В соответствии с требованиями, в материалах настоящей заявки раскрыты подробные варианты осуществления настоящего изобретения; однако следует понимать, что раскрытые варианты осуществления являются лишь примером изобретения, которое может быть реализовано в различных и альтернативных формах. Чертежи не обязательно выполнены в масштабе; некоторые признаки могут быть преувеличены или преуменьшены, чтобы показать детали конкретных компонентов. Поэтому конкретные конструктивные и функциональные подробности, раскрытые в материалах настоящей заявки, должны интерпретироваться не как ограничивающие, а лишь как представляющие основу для информирования специалиста в данной области техники о различных применениях настоящего изобретения.
На фиг. 1 проиллюстрирована принципиальная схема транспортного средства 10 согласно варианту осуществления настоящего изобретения. Физическое размещение и ориентация компонентов внутри транспортного средства 10 могут изменяться. Транспортное средство 10 может быть моторным транспортным средством, таким как автомобиль, грузовой автомобиль, сельскохозяйственное оборудование или военное транспортное средство. Транспортное средство 10 может включать в себя кузов 20 транспортного средства, систему 22 рулевого управления, систему 24 датчиков и систему 26 подвески.
Система 22 рулевого управления может быть соединена при функционировании с колесным узлом 30 транспортного средства. Колесный узел 30 транспортного средства может включать в себя первый колесный узел 32 и второй колесный узел 34, расположенный на определенном расстоянии в продольном направлении от первого колесного узла 32. Обычно первый колесный узел 32 может называться передним мостом, а второй колесный узел 34 может называться задним мостом.
Система 22 рулевого управления может быть выполнена с возможностью шарнирного поворота или вращения первого колесного узла 32 вокруг оси шкворня, чтобы изменять поворотное положение колес первого колесного узла 32. Система 22 рулевого управления может включать в себя рулевое колесо в поворотном соединении с первым колесным узлом 32 через рулевой механизм 36. Механизм 36 рулевого управления может быть выполнен с возможностью вращения или шарнирного поворота первого колесного узла 32 вокруг оси шкворня в ответ на поворачивание рулевого колеса через рулевые тяги или рулевые сошки, соединенные при функционировании с первым колесным узлом 32.
Система 22 рулевого управления может иметь передаточное отношение рулевого механизма, которое может соотносить величину поворота рулевого колеса с величиной вращения или поворота первого колесного узла 32. Более высокое передаточное отношение рулевого механизма может приводить к большей величине поворачивания рулевого колеса для поворота первого колесного узла 32. Более низкое передаточное отношение рулевого механизма может приводить к меньшей величине поворачивания рулевого колеса для поворота первого колесного узла 32. Рулевой механизм 36 может быть рулевым механизмом с реечной передачей, рулевым механизмом с циркулирующим шариком, рулевым механизмом с червяком и сектором, рулевым механизмом с переменным передаточным числом, системой рулевого управления с электроусилителем или другой конфигурацией, которая может поворачивать или шарнирно поворачивать колеса транспортного средства.
Первый колесный узел 32 может включать в себя первую шину 40, первое колесо 42, первую ступицу 44 колеса и первую поворотную цапфу 46. Первая шина 40 может быть установлена на первое колесо 42. Первое колесо 42 может быть установлено с возможностью вращения на первую ступицу 44 колеса. Первая ступица 44 колеса может быть установлена на первую поворотную цапфу 46. Первая поворотная цапфа 46 в конечном счете может соединять первый колесный узел 32 с шасси транспортного средства, которое может быть соединено при функционировании с кузовом 20 транспортного средства. Отдельный колесный узел может быть удалён в поперечном направлении от первого колесного узла 32.
Второй колесный узел 34 может включать в себя вторую шину 50, второе колесо 52, вторую ступицу 54 колеса и заднюю цапфу 56. Вторая шина 50 может быть установлена на второе колесо 52. Второе колесо 52 может быть установлено с возможностью вращения на второй ступице 54 колеса. Вторая ступица 54 колеса может быть установлена на заднюю цапфу 56. Задняя цапфа 56 в конечном счете может соединять второй колесный узел 34 с шасси транспортного средства, которое может быть соединено при функционировании с кузовом 20 транспортного средства. Отдельный колесный узел может быть удалён в поперечном направлении от второго колесного узла 34.
Система 24 датчиков может включать в себя множество датчиков транспортного средства. Множество датчиков транспортного средства может включать в себя датчик 60 обнаружения объекта и датчик 62 скорости вращения колеса. Датчик 60 обнаружения объекта может быть расположен вблизи ветрового стекла, передней части, переднего бампера, заднего окна, задней части или заднего бампера транспортного средства 10. Датчик 60 обнаружения объекта может быть системой камер или технического зрения, датчиком парковки, датчиком присутствия или близости, датчиком бокового обзора, датчиком переднего/заднего обзора или их комбинацией. Камера может быть камерой переднего обзора или камерой заднего обзора, выполненной с возможностью выдачи визуальной информации в отношении препятствий или объектов впереди или сзади от транспортного средства 10. Датчик парковки, датчик присутствия или близости, датчик бокового обзора или датчик переднего/заднего обзора могут быть по меньшей мере одним из ультразвукового датчика, радиолокатора, устройства лазерного радара (LIDAR), устройства радара (RADAR), лазерного сканера или их комбинацией. Количество, тип и/или расположение датчика 60 обнаружения объекта могут изменяться на основании применения транспортного средства. Датчик 60 обнаружения объекта может быть выполнен с возможностью выдачи данных или сигнала, указывающих на объекты в пределах заданной дальности от датчика 60 обнаружения объекта или транспортного средства 10.
Датчик 62 скорости вращения колеса может быть расположен ближе к по меньшей мере одной из первой ступицы 44 колеса первого колесного узла 32 и второй ступицы 54 колеса второго колесного узла 34. Датчик 62 скорости вращения колес может быть выполнен с возможностью выдачи данных или сигнала, указывающих частоту вращения или угловую скорость шины, колеса и/или ступицы колеса. Датчик 62 скорости вращения колеса в конечном счете может выдавать данные или сигнал, указывающие скорость вращения колеса.
Система 26 подвески может быть выполнена с возможностью соединения колесного узла 30 транспортного средства с кузовом 20 транспортного средства. Система 26 подвески также может быть выполнена с возможностью соединения колесного узла 30 транспортного средства с шасси транспортного средства, которое соединено с кузовом 20 транспортного средства. Система 26 подвески может быть системой активной подвески или системой полуактивной подвески.
Система 26 подвески может включать в себя первый узел 70 подвески колеса и второй узел 72 подвески колеса. Первый узел 70 подвески колеса может быть соединен при функционировании с первым колесным узлом 32 с помощью рычагов или тяг управления и может быть соединен при функционировании с кузовом транспортного средства с помощью первой опоры 78. Первый узел 70 подвески колеса может включать в себя первый исполнительный механизм 74 подвески и первый источник питания/усилитель 76. Первый исполнительный механизм 74 подвески может быть соединен при функционировании с кузовом 20 транспортного средства и первым колесным узлом 32. Первый исполнительный механизм 74 подвески может быть электрогидравлическим или электромеханическим исполнительным механизмом. Первый исполнительный механизм 74 подвески может быть выполнен с возможностью замены стойки или амортизатора, или других пассивных демпферов. По меньшей мере в одном варианте осуществления первый исполнительный механизм 74 подвески может включать в себя пружинный элемент, такой как цилиндрическая пружина или блочная пружина, расположенный вокруг или ближе к первому исполнительному механизму 74 подвески.
Первый исполнительный механизм 74 подвески может быть выполнен с возможностью активного управления кинематикой транспортного средства. Первый исполнительный механизм 74 подвески может управлять или изменять дорожный просвет первого узла подвески колеса, смещение подвески или длину хода колесного узла при отскоке или отбое, нагрузку подвески, жесткость и коэффициенты демпфирования подвески, и относительные расстояния между первым колесным узлом 32 и кузовом 20 транспортного средства. Первый исполнительный механизм 74 подвески может быть выполнен с возможностью вызова вибрационной сигнатуры в транспортном средстве 10. Вибрационная сигнатура может иметь переменную частоту и амплитуду. Вибрационная сигнатура может приводить к относительному движению между кузовом 20 транспортного средства и первым узлом 70 подвески колеса системы 26 подвески.
Питание может выдаваться на первый исполнительный механизм 74 подвески через первый источник питания/усилитель 76. Подводимое питание может возбуждать компонент первого исполнительного механизма 74 подвески, что может обеспечивать требуемую силу или отклонение на диске колеса. По меньшей мере в одном варианте осуществления, первый источник питания/усилитель 76 может быть заменен гидравлическим двигателем, соединенным при функционировании с источником гидравлической текучей среды, который может возбуждать первый исполнительный механизм 74 подвески.
Второй узел 72 подвески колеса может быть соединен при функционировании со вторым колесным узлом 34 с помощью рычагов или тяг управления и может быть соединен при функционировании с кузовом 20 транспортного средства с помощью второй опоры 84. Второй узел 72 подвески колеса может включать в себя второй исполнительный механизм 80 подвески и второй источник питания/усилитель 82. Второй исполнительный механизм 80 подвески может быть соединен при функционировании с кузовом 20 транспортного средства и вторым колесным узлом 34. Второй исполнительный механизм 80 подвески может быть электрогидравлическим или электромеханическим исполнительным механизмом. Второй исполнительный механизм 80 подвески может быть выполнен с возможностью замены стойки или амортизатора или других пассивных демпферов. По меньшей мере в одном варианте осуществления второй исполнительный механизм 80 подвески может включать в себя пружинный элемент, такой как цилиндрическая пружина или блочная пружина, расположенный вокруг или ближе ко второму исполнительному механизму 80 подвески.
Второй исполнительный механизм 80 подвески может быть выполнен с возможностью активного управления кинематикой транспортного средства. Второй исполнительный механизм 80 подвески может управлять дорожными просветами второго узла 72 подвески колеса, смещением подвески или длиной хода колесного узла при отскоке или отбое, нагрузкой подвески, жесткостью и коэффициентами демпфирования подвески, и относительными расстояниями между вторым колесным узлом 34 и кузовом 20 транспортного средства, или изменять их. Второй исполнительный механизм 80 подвески может быть выполнен с возможностью вызова вибрационной сигнатуры в транспортном средстве 10. Вибрационная сигнатура может иметь переменную частоту и амплитуду. Вибрационная сигнатура может приводить к относительному движению между кузовом 20 транспортного средства и вторым узлом 72 подвески колеса системы 26 подвески.
Питание может выдаваться на второй исполнительный механизм 80 подвески через второй источник питания/усилитель 82. Питание может возбуждать компонент второго исполнительного механизма 80 подвески, что может обеспечивать требуемую силу или отклонение на диске колеса. По меньшей мере в одном варианте осуществления второй источник питания/усилитель 82 может быть заменен гидравлическим двигателем, соединенным при функционировании с источником гидравлической текучей среды, который может возбуждать второй исполнительный механизм 80 подвески.
Контроллер 90 может находиться на связи между различными подсистемами, системами и компонентами транспортного средства. Конкретнее, контроллер 90 может находиться на связи с системой 22 рулевого управления, системой 24 датчиков и системой 26 подвески. По меньшей мере в одном варианте осуществления контроллер 90 может быть элементом большей системы управления, которая может включать в себя несколько контроллеров. Отдельные контроллеры или система управления могут находиться под влиянием различных других контроллеров по всему транспортному средству 10, в котором системный контроллер транспортного средства (VSC) работает на более высокой иерархии относительно других контроллеров.
Контроллер 90 может включать в себя по меньшей мере один микропроцессор или центральное процессорное устройство (CPU), осуществляющее связь с различными типами машиночитаемых запоминающих устройств или носителей. Машиночитаемые запоминающие устройства или носители могут включать в себя энергозависимое и энергонезависимое запоминающее устройство, например, в постоянном запоминающем устройстве (ROM), оперативном запоминающем устройстве (RAM) и дежурной памяти (KAM). KAM является постоянной или энергонезависимой памятью, которая может использоваться для хранения различных рабочих переменных, в то время как выключено питание CPU. Машиночитаемые запоминающие устройства или носители могут быть реализованы с использованием любого из некоторого количества известных устройств памяти, таких как PROM (программируемые постоянные запоминающие устройства), EPROM (электрически программируемые ROM), EEPROM (электрически стираемые PROM), флэш-память или любые другие электрические, магнитные, оптические или комбинированные устройства памяти, способные хранить данные, некоторые из которых представляют собой исполняемые команды, используемые контроллером при управлении двигателем или транспортным средством.
VSC и другие контроллеры поддерживают связь с множеством датчиков и исполнительных механизмов через интерфейс ввода/вывода (I/O), который может быть реализован в виде единого встроенного интерфейса, который обеспечивает предварительную обработку, обработку и/или преобразование различных исходных данных или сигналов, защиту от короткого замыкания, и тому подобное. В качестве альтернативы, одна или более специализированных аппаратных или программно-аппаратных микросхем могут использоваться для приведения в нужное состояние и обработки конкретных сигналов перед подачей в ЦПУ (центральное процессорное устройство, CPU).
Хотя не проиллюстрировано в прямой форме, рядовые специалисты в данной области техники будут осознавать различные функции или компоненты, которые могут управляться посредством VSC, в пределах каждой из подсистем, идентифицированных выше. Типичные примеры параметров, систем и/или компонентов, которые могут непосредственно или опосредованно приводиться в действие с использованием логики управления, выполняемой контроллером, включают в себя передаточное отношение рулевого механизма, отклонение подвески, вибрацию или колебание подвески, автономные маневры транспортного средства, компоненты привода вспомогательного оборудования передней части (FEAD), такие как генератор переменного тока, компрессор кондиционирования воздуха, зарядка аккумуляторной батареи, торможение, передаточное отношение трансмиссии и ускорение/замедление.
Контроллер 90 может находиться на связи с системой 24 датчиков. Точнее, контроллер 90 может находиться на связи с датчиком 60 обнаружения объекта. Контроллер 90 может быть запрограммирован для идентификации объекта 100 в ответ на объект 100, обнаруженный датчиком 60 обнаружения объекта в пределах заданного расстояния или дальности от транспортного средства 10. Например, контроллер 90 может быть выполнен с возможностью категоризации объекта 100, обнаруженного датчиком 60 обнаружения объекта, по меньшей мере в одну из множества заданных категорий или типов. Заданные категории или типы могут включать в себя дорожные препятствия или дефекты, такие как выбоины или другие выемки в пределах поверхности 102 дороги. Заданные категории или типы дополнительно могут включать в себя строительный мусор, препятствия или другие объекты, расположенные на поверхности 102 дороги. Заданные категории или типы по-прежнему дополнительно включают в себя другие транспортные средства впереди, сзади или рядом с транспортным средством 10.
Контроллер 90 может быть запрограммирован для приведения в действие по меньшей мере одного из первого исполнительного механизма 74 подвески и второго исполнительного механизма 80 подвески в ответ на объект 100, обнаруженный в пределах заданной дальности транспортного средства 10. По меньшей мере один из первого исполнительного механизма 74 подвески и второго исполнительного механизма 80 подвески может приводиться в действие согласно множеству заданных профилей приведения в действие, связанных с заданными категорией или типом объекта 100. Заданный профиль приведения в действие, связанный с заданными категорией или типом объекта 100, может предусматривать изменяющиеся частоту и/или амплитуду вибрационной сигнатуры, сообщаемого транспортному средству 10 первым исполнительным механизмом 74 подвески и/или вторым исполнительным механизмом 80 подвески. Первый исполнительный механизм 74 подвески и второй исполнительный механизм 80 подвески могут приводиться в действие одновременно, последовательно или перемежающимся образом, так чтобы приводилась в действие одна сторона транспортного средства 10 или приводились в действие противоположные углы транспортного средства 10.
Каждая из различных идентифицированных категорий/типов объекта 100 может приводить к различной вибрационной сигнатуре, сообщаемой транспортному средству 10. Частота и амплитуда вибрационной сигнатуры могут изменяться на основании скорости транспортного средства, выданной датчиком 62 скорости вращения колеса, и/или категории/типа объекта 100. Частота вибрационной сигнатуры, вызванной исполнительными механизмами подвески, может изменяться в диапазоне от 1 Гц до 100 Гц. По меньшей мере в одном варианте осуществления вибрационная сигнатура, вызванная исполнительными механизмами подвески, может имитировать вибрацию, вызываемую в транспортном средстве 10 колесным узлом 30 транспортного средства, встречающимся с предохранительными полосами или приподнятыми метками дорожного покрытия. Вибрационная сигнатура может вызываться исполнительными механизмами подвески до встречи транспортного средства 10 с объектом 100.
Пользовательский интерфейс 110 может находиться на связи с контроллером 90. Контроллер 90 может быть запрограммирован для формирования выходных данных для отображения через пользовательский интерфейс 110. Пользовательский интерфейс 110 может быть выполнен с возможностью отображения индикатора, указывающего категорию/тип объекта, обнаруженного датчиком 60 обнаружения объекта. Индикатор, указывающий категорию/тип объекта 100, обнаруженного датчиком 60 обнаружения объекта, может быть визуальным индикатором, звуковым сигналом/индикатором или тактильным индикатором.
На фиг. 2 показан примерный пользовательский интерфейс 110. Пользовательский интерфейс 110 может включать в себя громкоговоритель 112, выполненный с возможностью выдачи звукового сигнала/индикатора. Например, звуковой сигнал может имитировать шум, создаваемый колесом транспортного средства, встречающимся с предохранительной полосой, а амплитуда и частота звукового сигнала может изменяться на основании скорости транспортного средства. Можно отображать категорию/тип 114 объекта 100, обнаруженного датчиком 60 обнаружения объекта. Пользовательский интерфейс 110 может отображать профиль 116 приведения в действие, связанный с категорией/типом 114 объекта 100, обнаруженного датчиком 60 обнаружения объекта.
Первый профиль 120 приведения в действие может быть связан с первой категорией/типом 122, такими как выбоины или другие выемки в поверхности 102 дороги. Второй профиль 124 приведения в действие может быть связан со вторыми категорией/типом 125, такими как строительный мусор, препятствия, лежачие полицейские или другие объекты, расположенные на или продолжающиеся из поверхности 102 дороги. Третий профиль 128 приведения в действие может быть связан с третьими категорией/типом 130, такими как транспортное средство впереди транспортного средства 10. Четвертый профиль 132 приведения в действие может быть связан с четвертыми категорией/типом 134, такими как транспортное средство сзади от транспортного средства 10. Пятый профиль 136 приведения в действие может быть связан с передачей 138 управления автономным транспортным средством водителю транспортного средства 10. Другие профили приведения в действие также могут быть предусмотрены на основании других сценариев или объектов, обнаруженных рядом с транспортным средством 10. Например, система обнаружения сонливости водителя может быть на связи с контроллером 90. Исполнительные механизмы подвески могут приводиться в действие согласно профилю приведения в действие, связанному с сонливостью водителя, чтобы предупреждать водителя транспортного средства 10, если обнаружена сонливость водителя.
Контроллер 90 может быть выполнен с возможностью приведения в действие первого исполнительного механизма 74 подвески в ответ на приближение транспортного средства 10 к объекту 100, в то время как скорость транспортного средства выше пороговой скорости транспортного средства. Вибрационная сигнатура, вызванная приведением в действие первого исполнительного механизма 74 подвески, может снабжать водителя транспортного средства 10 уведомлением для снижения скорости транспортного средства. Вибрационная сигнатура может вызываться по меньшей мере до тех пор, пока скорость транспортного средства не становится меньшей, чем пороговая скорость транспортного средства. Например, в то время как транспортное средство 10 движется в направлении объекта 100, обнаруженного находящимся впереди транспортного средства 10, первый исполнительный механизм 74 может приводиться в действие, чтобы вызвать вибрационную сигнатуру в транспортном средстве согласно типу и/или категории объекта 100. В дополнительном примере, в то время как транспортное средство 10 движется в направлении объекта 100, обнаруженного находящимся сзади от транспортного средства 10, второй исполнительный механизм 80 может приводиться в действие для вызова вибрационной сигнатуры в транспортном средстве согласно типу и/или категории объекта 100.
Контроллер 90 может быть выполнен с возможностью приведения в действие второго исполнительного механизма 80 подвески в ответ на приближение транспортного средства 10 к объекту 100, в то время как транспортное средство выполняет маневр постановки на стоянку. Вибрационная сигнатура, вызванная приведением в действие второго исполнительного механизма 80 подвески, может имитировать удар с объектом 100, обнаруженным находящимся сзади от транспортного средства 10. Например, в то время как транспортное средство 10 движется в направлении объекта 100, обнаруженного находящимся сзади от транспортного средства 10, второй исполнительный механизм 80 может приводиться в действие для вызова вибрационной сигнатуры в транспортном средстве согласно типу и/или категории объекта 100.
Контроллер 90 может быть выполнен с возможностью приведения в действие по меньшей мере одного из первого исполнительного механизма 74 подвески и второго исполнительного механизма 80 подвески в ответ на приближающееся завершение транспортным средством 10 автономного маневра транспортного средства. Автономный маневр транспортного средства может быть автономной эксплуатацией транспортного средства 10, маневром постановки на стоянку или другой операцией транспортного средства, которая не требует вмешательства водителя. По меньшей мере в одном варианте осуществления контроллер 90 может быть выполнен с возможностью приведения в действие по меньшей мере одного из первого исполнительного механизма 74 подвески и второго исполнительного механизма 80 подвески в ответ на встречу транспортного средства 10 с опасностью на дороге, которая может требовать вмешательства водителя. Вибрационная сигнатура вызванная приведением в действие по меньшей мере одного из первого исполнительного механизма 74 подвески и второго исполнительного механизма 80 подвески, может уведомлять водителя транспортного средства 10 для подготовки к взятию под контроль/передаче управления транспортным средством.
На фиг. 3 показана блок-схема , иллюстрирующая примерный способ управления системой активной подвески транспортного средства. Как будет понятно специалисту в данной области техники, блок-схема представляет управляющую логику, которая может быть реализована или осуществлена в аппаратных средствах, программном обеспечении или сочетании аппаратных средств и программного обеспечения. Например, упомянутые различные функции могут находиться под влиянием запрограммированного микропроцессора. Управляющая логика может быть реализована с использованием любого из некоторого количества известных технологий или стратегий программирования или обработки и не ограничена проиллюстрированными порядком или последовательностью. Например, управляемая прерываниями или событиями обработка может использоваться в устройствах управления реального времени вместо чисто последовательной стратегии, как проиллюстрировано. Подобным образом, могут использоваться системы и способы параллельной обработки, многозадачные или многопоточные.
Управляющая логика может быть независимой от конкретного языка программирования, операционной системы, процессора или схемы, используемых для разработки и/или реализации проиллюстрированной управляющей логики. Подобным образом, в зависимости от конкретного языка программирования и стратегии обработки, различные функции могут выполняться в проиллюстрированной последовательности, по существу одновременно или в разной последовательности при выполнении способа управления. Проиллюстрированные функции могут быть модифицированы или в некоторых случаях пропущены, не выходя за рамки намеченного объема.
По меньшей мере в одном из вариантов осуществления способ может выполняться контроллером 90 и может быть реализован в виде системы управления с обратной связью. Для краткости способ будет описан ниже в контексте одной итерации.
На этапе 200 способ может оценивать рабочее состояние транспортного средства, что может включать в себя оценивание, находится ли система подвески и/или система управления в рабочем состоянии. Например, если зажигание транспортного средства выключено, двигатель не работает, или система подвески и/или система управления не находится в рабочем состоянии или не функционирует надлежащим образом, то способ или текущая итерация способа может заканчиваться. Если транспортное средство включено и движется, и система 26 подвески и/или контроллер 90 могут быть функционирующими надлежащим образом, способ может продолжаться на этапе 202. По меньшей мере в одном варианте осуществления способ может оценивать скорость транспортного средства и направление движения транспортного средства 10. Способ может оценивать, движется ли транспортное средство 10 вперед, назад, поворачивает ли оно или выполняет автономный маневр.
На этапе 202 способ может определять, обнаружен ли объект 100 находящимся в пределах заданного расстояния или дальности от транспортного средства 10. Если объект 100 не обнаруживается находящимся в пределах заданного расстояния или дальности от транспортного средства, способ может заканчиваться. Если объект 100 обнаружен находящимся в пределах заданного расстояния или дальности от транспортного средства 10, способ может категоризировать объект 100 или классифицировать объект 100 отнесением к по меньшей мере одной из множества заданных категорий на этапе 204.
На этапе 206 способ может приводить в действие систему 26 подвески для вызова вибрационной сигнатуры в транспортном средстве 10 до встречи транспортного средства 10 с объектом 100. Точнее, по меньшей мере один из первого исполнительного механизма 74 подвески и второго исполнительного механизма 80 подвески может приводиться в действие согласно заданному профилю приведения в действие, связанному с по меньшей мере одной из множества заданных категорий и скоростью транспортного средства, для вызова вибрационной сигнатуры в кузове 20 транспортного средства. Заданный профиль приведения в действие, связанный с по меньшей мере одной из множества заданных категорий и скоростью транспортного средства, может изменять частоту и амплитуду вибрационной сигнатуры.
По меньшей мере в одном варианте осуществления способ может изменять передаточное отношение рулевого механизма системы 22 рулевого управления. Передаточное отношение рулевого механизма может изменяться, когда вибрационная сигнатура вызывается в транспортном средстве 10. Передаточное отношение рулевого механизма может изменяться, так чтобы водителю транспортного средства 10 могла быть запрещена чрезмерная коррекция транспортного средства 10 для избегания объекта 100.
На этапе 208 способ может выводить для отображения через пользовательский интерфейс 110 индикатор, когда вибрационная сигнатура вызывается в транспортном средстве 10. Индикатор может быть звуковым сигналом, выводимым громкоговорителем 112, указывающим категорию объекта 100, обнаруженного датчиком 60 обнаружения объекта. Индикатор может быть визуальным индикатором, отображаемым пользовательским интерфейсом 110, указывающим категорию объекта 100, обнаруженного датчиком 60 обнаружения объекта.
На этапе 210 способ может оценивать, был ли объект 100, обнаруженный датчиком 60 обнаружения объекта, избегнут или его влияние было уменьшено. Объект 100, обнаруженный датчиком 60 обнаружения объекта, может быть избегнут, если скорость транспортного средства уменьшена ниже порогового значения, объект 100 больше не находится в пределах заданного расстояния или дальности от транспортного средства 10, или была изменена траектория транспортного средства. Если объект 100, обнаруженный датчиком 60 обнаружения объекта, не был избегнут или его влияние не было уменьшено, система 26 подвески может продолжать приводиться в действие, и индикатор может продолжать отображаться пользовательским интерфейсом 110. Если объект 100, обнаруженный датчиком обнаружения объекта, был избегнут или его влияние было уменьшено, способ может заканчиваться.
При том, что примерные варианты осуществления описаны выше, не предполагается, что эти варианты осуществления описывают все возможные формы изобретения. Скорее, слова, используемые в описании изобретения, являются описательными словами, а не ограничивающими, и понятно, что могут быть выполнены различные изменения, не выходящие за рамки сущности и объема изобретения. Кроме того, признаки различных вариантов осуществления заявляемого изобретения могут комбинироваться для формирования дополнительных вариантов осуществления изобретения.
Изобретение относится к подвескам транспортных средств. Транспортное средство содержит исполнительный механизм подвески и контроллер. Контроллер запрограммирован для идентификации классификации объекта в ответ на обнаружение объекта вблизи транспортного средства и приведения в действие исполнительного механизма подвески для вызова вибрационной сигнатуры в транспортном средстве на основании классификации объекта таким образом, чтобы различные идентифицированные классификации объекта приводили к различной вибрационной сигнатуре. Достигается обеспечение достаточного времени для реагирования водителя на потенциальную угрозу безопасности. 11 з.п. ф-лы, 3 ил.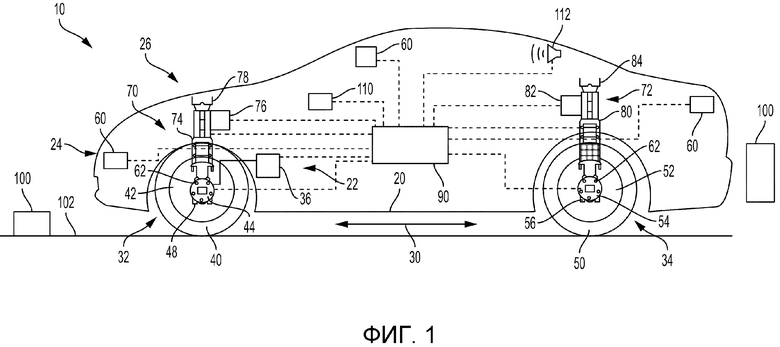
1. Транспортное средство, содержащее:
исполнительный механизм подвески; и
контроллер, запрограммированный в ответ на обнаружение объекта впереди транспортного средства и скорость транспортного средства, превышающую пороговую величину, для идентификации классификации объекта, ассоциированной с объектом, и приведения в действие исполнительного механизма подвески для вызова вибрационной сигнатуры в транспортном средстве на основании классификации объекта таким образом, чтобы различные идентифицированные классификации объекта приводили к различной вибрационной сигнатуре.
2. Транспортное средство по п. 1, дополнительно содержащее пользовательский интерфейс, выполненный с возможностью выдачи звукового сигнала в ответ на обнаружение объекта впереди транспортного средства.
3. Транспортное средство по п. 1, дополнительно содержащее систему рулевого управления, причём контроллер дополнительно запрограммирован для изменения передаточного отношения рулевого механизма системы рулевого управления в ответ на обнаружение объекта впереди транспортного средства.
4. Транспортное средство по п. 1, в котором контроллер дополнительно запрограммирован, в ответ на обнаружение объекта сзади от транспортного средства и выполнение транспортным средством маневра постановки на стоянку, для идентификации классификации объекта, ассоциированной с объектом, и приведения в действие исполнительного механизма подвески для вызова вибрационной сигнатуры в транспортном средстве на основании упомянутой классификации объекта и скорости транспортного средства.
5. Транспортное средство по п. 1, в котором контроллер дополнительно запрограммирован, в ответ на обнаружение объекта впереди транспортного средства и выполнение транспортным средством автономного маневра, для идентификации классификации объекта, ассоциированной с объектом, и приведения в действие исполнительного механизма подвески для вызова вибрационной сигнатуры в транспортном средстве на основании классификации объекта до завершения автономного маневра.
6. Транспортное средство по п. 1, в котором вибрационная сигнатура имеет частоту в диапазоне от 1 Гц до 100 Гц.
7. Транспортное средство по п. 2, в котором пользовательский интерфейс дополнительно выполнен с возможностью отображения индикатора, указывающего на классификацию объекта.
8. Транспортное средство по п. 1, в котором классификация объекта включает в себя по меньшей мере одно из дорожных препятствий, дорожного мусора, лежачих полицейских и других транспортных средств.
9. Транспортное средство по п. 1, в котором контроллер дополнительно запрограммирован для изменения по меньшей мере одного из частоты и амплитуды вибрационной сигнатуры на основании по меньшей мере одного из скорости вращения колес и классификации объекта.
10. Транспортное средство по п. 1, дополнительно содержащее пользовательский интерфейс, и при этом контроллер дополнительно запрограммирован для отображения водителю транспортного средства уведомления для снижения скорости транспортного средства ниже порогового значения.
11. Транспортное средство по п. 10, в котором контроллер дополнительно запрограммирован для приведения в действие исполнительного механизма подвески до тех пор, пока скорость транспортного средства не станет ниже порогового значения.
12. Транспортное средство по п. 1, в котором контроллер дополнительно запрограммирован, в ответ на завершение транспортным средством автономного манёвра транспортного средства, для приведения в действие исполнительного механизма подвески для вызова вибрационной сигнатуры для уведомления водителя транспортного средства о передаче управления транспортным средством.
| СИСТЕМА АКТИВНОЙ ВИБРОЗАЩИТЫ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2406620C2 |
| US 2013218415 A1, 22.08.2013 | |||
| US 2008266167 A1, 30.10.2008 | |||
| US 8948501 B1, 03.02.2015. | |||

