Область техники.
Изобретение относится к средствам технической диагностики в электроэнергетике, в частности к оптико-электронным приборам для мониторинга мест коронных разрядов на высоковольтном электрооборудовании и на высоковольтных линиях электропередачи.
Неисправности на высоковольтном электрооборудовании и на высоковольтных линиях электропередачи сопровождаются появлением коронных разрядов, которые излучают в ультрафиолетовом диапазоне спектра. Принимая и анализируя это ультрафиолетовое излучение, можно определить места неисправностей, а также в некоторых случаях понять тип неисправности. Очень важной является возможность определения предвестников аварий, когда неисправность не проявила себя еще в полной мере.
Уровень техники.
Известен электронно-оптический дефектоскоп «Филин-6» [1], (RU 55480 U1 30.03.2006), который состоит из кварцевого длиннофокусного объектива с соответствующим полосовым или диспергирующим фильтром, электронно-оптического преобразователя, стробирующего устройства, аккумуляторного питания, источника опорного оптического сигнала для измерения амплитуды излучения, цифровой камеры с адаптером для присоединения к дефектоскопу.
По сравнению с предыдущими изделиями у известного дефектоскопа повышено качество видимого изображения, повышена устойчивость к фоновым засветкам.
Недостатком данного электронно-оптического дефектоскопа является необходимость проведения обследования электрооборудования (ЭО) на предмет наличия или отсутствия местных коронных разрядов только в темное время суток (освещенность до 100 люкс). Данный недостаток обуславливает повышенную опасность, стоимость и значительное неудобство проведения технической диагностики ЭО. Кроме того, данное устройство не позволяет в автоматическом режиме определять географические координаты и высоту над поверхностью земли мест коронных разрядов.
Известно семейство ультрафиолетовых камер DayCor фирмы OFIL Systems, Израиль (DayCor SUPERB, DayCor Classic, DayCor Rail, DayCor DayCor Ranger, DayCor Rom, DayCor Luminar, DayCor UVolle-VI, DayCor UVolle-S), основным элементом которых являются катадиоптрические (собирающие) линзы с большой площадью накопления фотонов (19 см2), используемые в камерах для блокирования фоновой солнечной радиации и фильтрации с высоким показателем сигнал/шум оптического излучения в солнечно-слепом диапазоне (ССД) - 240-280 нм [2].
Данные камеры позволяют удобно и эффективно проводить УФ-диагностику ЭО, в том числе и при дневном освещении, при полной солнечной засветке (чувствительность 1,5-2 пКл на расстоянии 8 м).
Недостатком данного технического решения является использование дорогой технологии оптической фильтрации в области жесткого ультрафиолетового (УФ) излучения с высоким показателем сигнал/шум. Кроме того, данное устройство не позволяет в автоматическом режиме определять географические координаты и высоту над поверхностью земли мест коронных разрядов.
Известны также аналогичные изделия CoroCam фирмы UVIRCO Technologies ЮАР [3] и изделия Corovision II фирмы General Optics США [4], достоинства и недостатки изделий такие же, как у предыдущих камер. Данные устройства также не позволяют в автоматическом режиме определять географические координаты и высоту над поверхностью земли мест коронных разрядов.
Известно устройство обнаружения и определения координат источников ультрафиолетового излучения (RU 108151 U1, 13.04.2011), являющееся ультрафиолетовым пеленгатором, содержащее приемный объектив, спектральный фильтр, приемник излучения, ПЗС-матрицу, к выходу которой подключен электронный блок обработки сигнала, отличающееся тем, что дополнительно введен проекционный объектив, установленный между приемником излучения и ПЗС-матрицей, при этом приемник излучения выполнен в виде электронно-оптического преобразователя с фотокатодом, чувствительным к ультрафиолетовому излучению.
Недостатком устройства является низкая производительность, невозможность определять в автоматическом режиме географические координаты и высоту над поверхностью земли мест коронных разрядов и невозможность регистрации амплитудно-временной характеристики коронного разряда.
Известно устройство, реализующее способ дистанционного контроля качества изоляции объектов высоковольтных электрических установок переменного тока (RU 2402030 С1, 20.10.2010), являющееся ультрафиолетовым пеленгатором, а также способ регистрации ультрафиолетового излучения и устройство для его осуществления (RU 2431121 С2, 29.12.2008), являющееся ультрафиолетовым пеленгатором. Известные устройства содержат оптическую систему, включающую УФ-объектив, в котором используются линзы, специальные кристаллы с пропусканием УФ-излучения в диапазоне 250-280 нм и подавлением других длин волн, а также УФ-фильтры, за которыми размещен монофотонный время-координатно-чувствительный детектор (ВКЧД), временной канал, электронная система управления.
Устройства позволяют регистрировать амплитудно-временную характеристику (сигнатуру) коронного разряда.
Недостатками известных устройств являются низкая точность определения координат, малое быстродействие, трудоемкий процесс предварительной калибровки.
Известно ультрафиолетовое устройство разведки целей (RU 2520726 С1, 24.12.2012), являющееся ультрафиолетовым пеленгатором, в котором за счет применения многоанодного фотоумножителя новой конструкции повышена точность определения координат, увеличено быстродействие, исключен трудоемкий процесс предварительной калибровки.
Недостатком известного устройства, так же, как и всех перечисленных выше устройств, является большое время обследования электрооборудования и линий электропередач и невозможность определять в автоматическом режиме географические координаты и высоту над поверхностью земли мест коронных разрядов.
Для уменьшения времени обследования электрооборудования и линий электропередач необходимо размещать устройства на авиационных носителях, кроме того, при этом появляется возможность определять в автоматическом режиме географические координаты и высоту над поверхностью земли мест коронных разрядов.
Размещение устройств на полноценных вертолетах и самолетах ограничивает возможности использования аппаратуры, кроме того, резко увеличивает стоимость мониторинга и диагностики.
Выходом является применение малоразмерных беспилотных летальных аппаратов (БЛА) самолетного, вертолетного или мультикоптерного типа.
Наиболее близким к заявленному техническому решению является беспилотный летательный аппарат и комплекс авианаблюдения для него RU 2518440 С2, 23.04.2012 (прототип).
Недостатком этого устройства является отсутствие способности регистрации коронных разрядов и, следовательно, невозможность определения в автоматическом режиме географических координат и высоты над поверхностью земли мест коронных разрядов.
Раскрытие изобретения
Задачей настоящего изобретения является создание беспилотного летательного устройства и комплекса авианаблюдения для него, обеспечивающего возможность регистрации коронных разрядов электрооборудования и линий электропередач, обеспечивающего возможность определения в автоматическом режиме географических координат и высоты над поверхностью земли мест коронных разрядов и автоматическую регистрацию амплитудно-временной характеристики (сигнатуры) коронного разряда, позволяющей определять тип неисправности электрооборудования и линий электропередач.
Изобретение характеризуется следующей совокупностью признаков.
Беспилотное летающее устройство для определения координат коронных разрядов, содержащее беспилотный летательный аппарат и наземный мобильный пункт контроля и управления, беспилотный летательный аппарат включает в себя несущий каркас, на котором в вершинах воображаемого многоугольника жестко зафиксированы по меньшей мере шесть электродвигателей с пропеллерами с контролируемой частотой вращения, причем диаметрально расположенные электродвигатели имеют встречное направление вращения, электродвигатели связаны с аккумулятором и компьютером, который связан с системой авианаблюдения, приемником GPS/ГЛОНАСС, регулятором вращения электродвигателей, приемопередатчиком, акселерометром, компасом, альтиметром (высотомером), гироскопом, компьютер выполнен с возможностью управления частотой вращения электродвигателей, при этом обеспечивая горизонтальное положение летательного аппарата по сигналам акселерометра и гироскопа, обеспечивая изменение курса и высоты летательного аппарата по сигналам управления с наземного мобильного пункта контроля и управления, а также обеспечения контроля и управления летательным аппаратом на основании координат спутниковой навигационной системы по сигналам приемника GPS/ГЛОНАСС для выполнения в автоматическом режиме полетного задания с возвращением на взлетную площадку, отличающееся тем, что система авианаблюдения выполнена в виде ультрафиолетового пеленгатора на основе многоанодного фотоумножителя.
В качестве дополнительного развивающего признака следует указать возможность выполнения приемопередатчика в виде устройства WiFi.
Описание чертежей
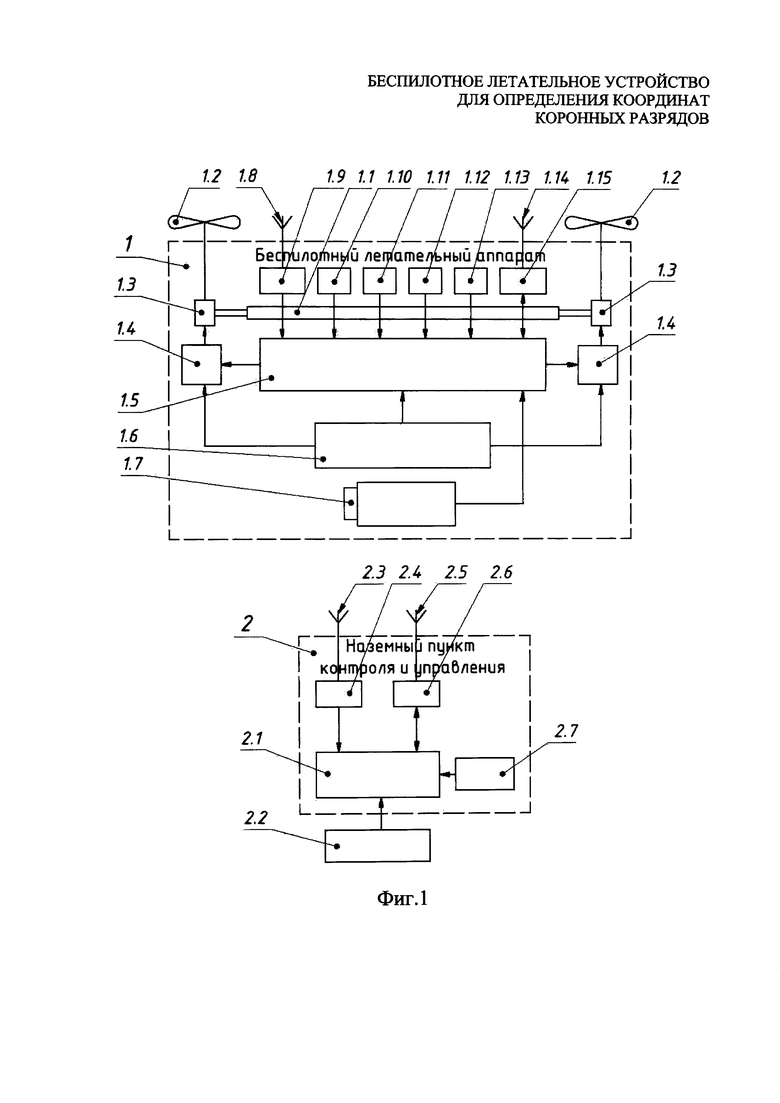
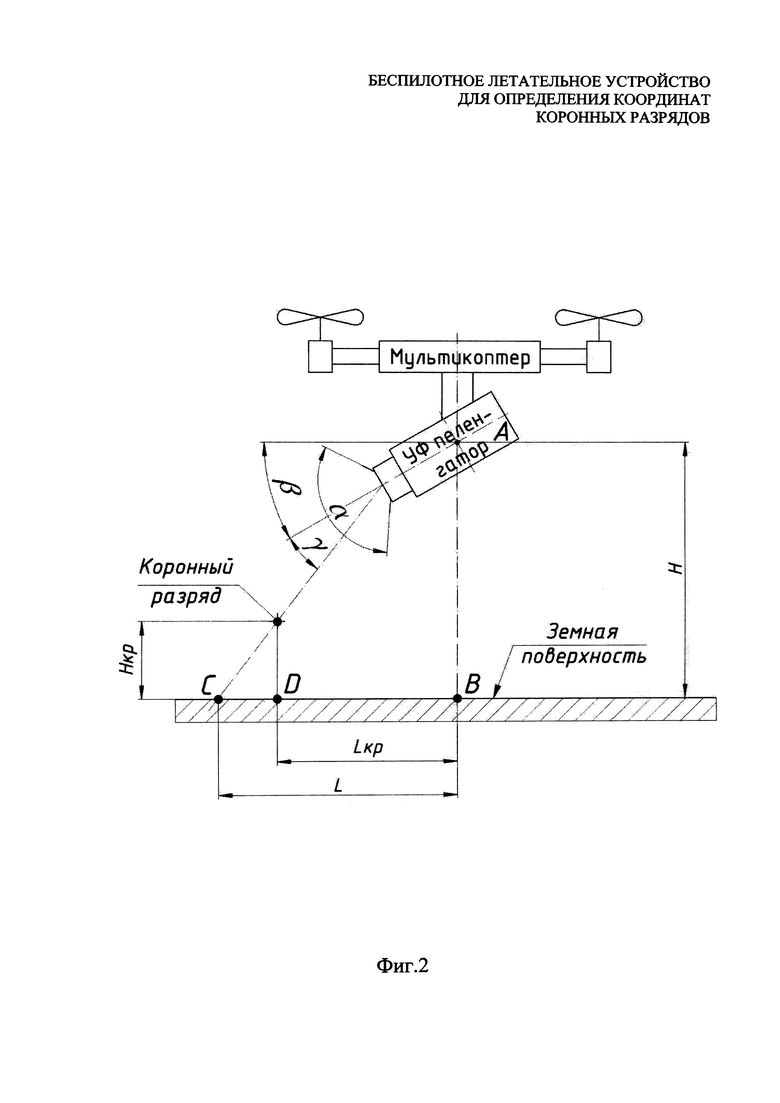
На фиг. 1 представлена структурная схема беспилотного летательного устройства для определения координат коронных разрядов, на фиг. 2 представлена схема, поясняющая принцип определения географических координат и высоты над поверхностью земли мест коронных разрядов.
Осуществление изобретения
Устройство содержит:
1 - беспилотный летательный аппарат;
1.1 - несущий каркас;
1.2 - пропеллеры;
1.3 - электродвигатели;
1.4 - регуляторы вращения электродвигателей;
1.5 - компьютер;
1.6 - аккумулятор;
1.7 - ультрафиолетовый пеленгатор;
1.8 - антенну приемника GPS/ГЛОНАСС;
1.9 - приемник GPS/ГЛОНАСС;
1.10 - акселерометр;
1.11 - компас;
1.12 - альтиметр (высотомер);
1.13 - гироскоп;
1.14 - антенну приемопередатчика;
1.15 - приемопередатчик;
2 - наземный мобильный пункт контроля и управления;
2.1 - компьютер;
2.2 - пульт управления;
2.3 - антенну приемника GPS/ГЛОНАСС;
2.4 - приемник GPS/ГЛОНАСС;
2.5 - антенну приемопередатчика;
2.6 - приемопередатчик;
2.7 - аккумулятор.
Обозначения, указанные на фиг. 2, означают следующее:
α - угол поля зрения ультрафиолетового пеленгатора, β - угол наклона оптической оси ультрафиолетового пеленгатора относительно земной поверхности, γ - угол между оптической осью ультрафиолетового пеленгатора и направлением на коронный разряд, Н - высота ультрафиолетового пеленгатора над земной поверхностью, Нкр - высота коронного разряда над земной поверхностью, L - расстояние от проекции центра координат ультрафиолетового пеленгатора до точки С, Lкр - расстояние от проекции центра координат ультрафиолетового пеленгатора до точки D.
Устройство работает следующим образом. Устройство может работать в автоматическом и ручном режимах.
Работа в автоматическом режиме. Оператор на наземном мобильном пункте контроля и управления 2 с помощью компьютера 2.1 задает маршрут полета и высоту полета по маршруту. Оператор с помощью наземного мобильного пункта контроля и управления 2 дает команду БЛА 1 на начало полета. Компьютер 1.5 БЛА 1 с помощью приемника GPS/ГЛОНАСС 1.9 измеряет текущие географические координаты, сравнивает их с первыми заданными географическими координатами и, управляя электродвигателями 1.3 через регуляторы вращения электродвигателей 1.4, направляется в первую точку географических координат заданного маршрута. Компьютер 1.5 БЛА 1 с помощью высотомера 1.12 измеряет текущую высоту полета, сравнивает ее с первой заданной высотой полета и, управляя электродвигателями 1.3 через регуляторы вращения электродвигателей 1.4, поднимается на первую заданную высоту. После этого устройство начинает облет заданного маршрута. При запуске устройства начинает работать и ультрафиолетовый пеленгатор 1.7. При полете по маршруту ультрафиолетовый пеленгатор 1.7 постоянно готов фиксировать ультрафиолетовое излучение коронных разрядов. При появлении ультрафиолетового излучения коронного разряда ультрафиолетовый пеленгатор 1.7 определяет координаты коронного разряда относительно своей оптической оси. Зная фокусное расстояние объектива ультрафиолетового пеленгатора 1.7, пеленгатор 1.7 определяет угол γ (фиг. 2) между оптической осью ультрафиолетового пеленгатора 1.7 и направлением на коронный разряд. Компьютер 1.5, зная с помощью высотомера 1.12 высоту полета устройства, зная с помощью приемника GPS/ГЛОНАСС 1.9 текущие географические координаты устройства, зная с помощью компаса 1.11 направление полета устройства, определяет расстояние L и географические координаты точки С (фиг. 2). Таким образом, определяется уравнение первой прямой, на которой расположен коронный разряд. Для второй точки маршрута указанная последовательность действий повторяется и определяется уравнение второй прямой, на которой находится коронный разряд. Совместное решение этих двух уравнений позволяет найти географические координаты и высоту над поверхностью земли места текущего коронного разряда. Указанная последовательность действий повторяется для всех остальных имеющихся мест коронного разряда. Географические координаты и высота мест коронного разряда записываются в запоминающее устройство компьютера 1.5. Кроме того, двигаясь по маршруту, ультрафиолетовый пеленгатор 1.7 на основе многоанодного фотоумножителя может регистрировать амплитудно-временную характеристику (сигнатуру) коронного разряда. Зная типичные сигнатуры неисправностей, ультрафиолетовый пеленгатор определяет тип неисправности в данном конкретном месте коронного разряда и время развития аварийного состояния. Компьютер 1.5 БЛА 1 с помощью приемопередатчика 1.15 постоянно в режиме реального времени передает полученную информацию на наземный мобильный пункт контроля и управления 2. Компьютер 2.1 наземного мобильного пункта контроля и управления 2 отображает на своем мониторе карту местности, на карте местности компьютер 2.1 специальными значками отображает свое расположение и расположение БЛА 1. Компьютер 2.1 наземного пункта контроля и управления отображает также специальными значками на карте местности места коронных разрядов, указывает высоту мест коронных разрядов над поверхностью земли и указывает тип неисправности. Если обнаружены места предаварийных состояний, то компьютер 2.1 выдает звуковой сигнал, подсвечивает место предполагаемой аварии красным цветом и выдает указание на безотлагательное принятие мер по устранению неисправности.
Работа в ручном режиме. Оператор с помощью пульта управления 2.2 наземного мобильного пункта контроля и управления 2 запускает БЛА 1 и начинает движение по маршруту. Ультрафиолетовый пеленгатор 1.7 включен и наблюдает за окружающим пространством. Дальнейшие действия происходят аналогично работе в автоматическом режиме.
В качестве приемопередатчиков 1.15 и 2.6 может быть использовано устройство WiFi.
Область применения устройства не ограничивается электроэнергетикой. Устройство может быть использовано в любой области, где требуется определять географические координаты и высоту над поверхностью земли мест ультрафиолетового излучения.
Источники информации
1. Арбузов Роман Сергеевич. Исследование и совершенствование метода оптического контроля внешней изоляции электрооборудования высокого напряжения. Диссертационная работа, канд. техн. наук, 05.14.12, Новосибирск, 2005, 203 с, РГБ ОД 61:05-5/2114.
2. Камеры серии DayCor [Электронный ресурс] - URL: www.davcor.ru. - (Сайт компании OFIL Systems).
3. Ультрафиолетовые камеры CoroCam [Электронный ресурс] - URL: www.corocam-uv.ru. - (Сайт компании UViRCO Technologies).
4. Ультрафиолетовые камеры COROVISION II [Электронный ресурс] - URL: www.corovision.ru. - (Сайт компании General Optics).
Беспилотный авиационный комплекс для определения координат коронных разрядов содержит беспилотный летательный аппарат, наземный мобильный пункт контроля и управления. Беспилотный летательный аппарат содержит каркас с закрепленными на нем шестью или больше электродвигателями с пропеллерами с контролируемой частотой вращения, осуществляемого определенным образом, аккумулятор, компьютер, систему авианаблюдения в виде ультрафиолетового пеленгатора на основе многоанодного фотоумножителя, приемник GPS/ГЛОНАСС, регулятор вращения электродвигателей, приемопередатчик, акселерометр, компас, альтиметр (высотомер), гироскоп. Обеспечивается определение географических координат мест коронных разрядов в автоматическом режиме. 2 ил.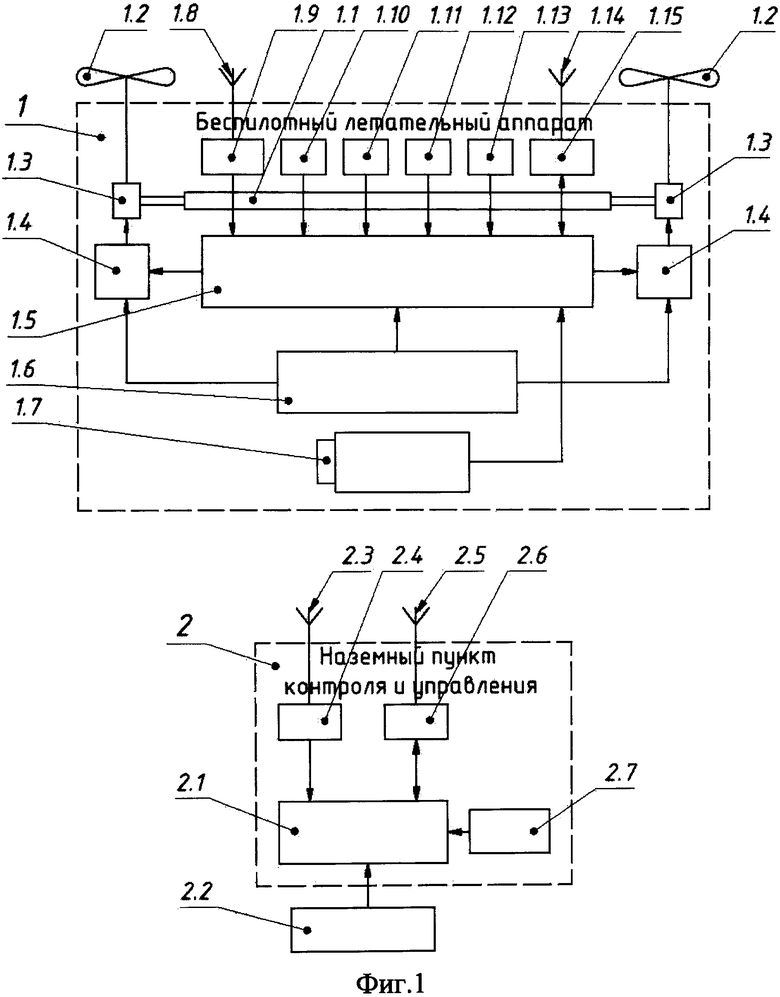
Беспилотный авиационный комплекс для определения координат коронных разрядов, содержащий беспилотный летательный аппарат и наземный мобильный пункт контроля и управления, беспилотный летательный аппарат включает в себя несущий каркас, на котором в вершинах воображаемого многоугольника жестко зафиксированы по меньшей мере шесть электродвигателей с пропеллерами с контролируемой частотой вращения, причем диаметрально расположенные электродвигатели имеют встречное направление вращения, электродвигатели связаны с аккумулятором и компьютером, который связан с системой авианаблюдения, приемником GPS/ГЛОНАСС, регулятором вращения электродвигателей, приемопередатчиком, акселерометром, компасом, альтиметром (высотомером), гироскопом, компьютер выполнен с возможностью управления частотой вращения электродвигателей, при этом обеспечивая горизонтальное положение летательного аппарата по сигналам акселерометра и гироскопа, обеспечивая изменение курса и высоты летательного аппарата по сигналам управления с наземного мобильного пункта контроля и управления, а также обеспечения контроля и управления летательным аппаратом на основании координат спутниковой навигационной системы по сигналам приемника GPS/ГЛОНАСС для выполнения в автоматическом режиме полетного задания с возвращением на взлетную площадку, отличающийся тем, что система авианаблюдения выполнена в виде ультрафиолетового пеленгатора на основе многоанодного фотоумножителя.
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И КОМПЛЕКС АВИАНАБЛЮДЕНИЯ ДЛЯ НЕГО | 2012 |
|
RU2518440C2 |
| СВЕРХШИРОКОУГОЛЬНАЯ СОЛНЕЧНО-СЛЕПАЯ ФОТОПРИЕМНАЯ ГОЛОВКА | 2013 |
|
RU2542641C1 |
| RU 2012152839 A, 20.06.2014 | |||
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ КАЧЕСТВА ИЗОЛЯЦИИ ОБЪЕКТОВ ВЫСОКОВОЛЬТНЫХ ЭЛЕКТРИЧЕСКИХ УСТАНОВОК ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2402030C1 |
| УЛЬТРАФИОЛЕТОВОЕ УСТРОЙСТВО РАЗВЕДКИ ЦЕЛЕЙ | 2012 |
|
RU2520726C1 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ДИСТАНЦИОННО ВЗАИМОДЕЙСТВУЮЩИХ ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2564628C2 |

