ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области ядерной энергетики, в частности к манипуляторам для сборки пучка тепловыделяющих элементов, предназначенных для их использования в реакторных установках типа БН-1200М.
УРОВЕНЬ ТЕХНИКИ
В авторском свидетельстве СССР №677687 на изобретение (далее SU 677687), опубликованном 30 июля 1979 года (МПК G21C 19/10), раскрыт манипулятор для топливных элементов и регулирующих стержней ядерного реактора, содержащий управляющие барабаны и барабан для перемещения двойного захвата с тросами, расположенные в корпусе, выполненном в виде телескопической трубы из звеньев, при этом в манипуляторе согласно SU 677687 двойной захват содержит захватные элементы, взаимодействующие соответственно с головками тепловыделяющих элементов или головками регулирующих стержней.
Недостатком известного манипулятора согласно SU 677687 является отсутствие возможности сборки пучка тепловыделяющих элементов с обеспечением возможности осуществления процесса его дальнейшего очехловывания, заключающегося в опускании чехла на установленный в обойму пучок тепловыделяющих элементов, при этом реализация таких функциональных возможностей в манипуляторе согласно SU 677687 требует его существенного переоборудования.
Наиболее близким аналогом (прототипом) является система манипулирования тепловыделяющими элементами, раскрытая в заявке на выдачу патента США №20110164718 (далее US 20110164718), опубликованной 07 июля 2011 года (МПК G21C 19/18 и G21C 19/32). В частности, система манипулирования тепловыделяющими элементами, раскрытая в US 20110164718, содержит захватное устройство, конструкция которого может быть переведена в горизонтальное положение и отсоединена от системы манипулирования в случае отказа. В системе согласно US 20110164718 захватное устройство содержит основной корпус и вспомогательный корпус с продольной осью, каждый из которых снабжен средствами качения с образованием кареток, выполненных с возможностью вертикального и горизонтального перемещения, а также содержит толкатели, захваты и приводы, обеспечивающие функционирование указанного захватного устройства.
Одним из недостатков системы согласно US 20110164718 является применение в ней сложных в изготовлении деталей и узлов, что в целом существенно усложняет конструкцию указанной системы. Кроме того, еще одним недостатком системы согласно US 20110164718 является то, что она не реализует возможность сборки пучка тепловыделяющих элементов с обеспечением возможности его дальнейшего очехловывания, то есть возможности опускания чехла на установленный в обойму пучок тепловыделяющих элементов.
Следует отметить, что процесс очехловывания в уровне техники обычно осуществляют путем поднятия собранного в обойму пучка тепловыделяющих элементов с обеспечением его втягивания в чехол, однако такая технология требует большой высоты помещения, поскольку для поднятия собранного в обойму пучка тепловыделяющих элементов необходима высота, приблизительно соответствующая длине тепловыделяющей сборки, при этом при опускании чехла на пучок тепловыделяющих элементов отсутствует необходимость в поднятии собранного в обойму пучка тепловыделяющих элементов.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является устранение по меньшей мере некоторых недостатков уровня техники, в частности обеспечение возможности сборки пучка тепловыделяющих элементов с его очехловыванием в вертикальном положении путем опускания чехла на собранный пучок тепловыделяющих элементов.
Поставленная задача решена путем создания манипулятора для сборки пучка тепловыделяющих элементов, содержащего: верхнюю раму, включающую первые направляющие и первое быстроразъемное соединение; нижнюю раму, включающую вторые направляющие, второе быстроразъемное соединение и первый универсальный привод; при этом верхняя рама выполнена с возможностью установки на нижнюю раму, а указанный манипулятор также содержит модуль вертикального перемещения, выполненный с возможностью установки на верхней раме и с возможностью стыковки с тепловыделяющим элементом; узел подачи тепловыделяющих элементов, выполненный с возможностью установки на верхней части нижней рамы и с возможностью последовательного приема тепловыделяющих элементов; хомут, установленный в нижней части нижней рамы и выполненный с возможностью фиксации пучка тепловыделяющих элементов; толкатель, выполненный с возможностью установки на верхней части нижней рамы и с возможностью перемещения тепловыделяющих элементов из узла подачи тепловыделяющих элементов в хомут; по меньшей мере один датчик, выполненный с возможностью установки по меньшей мере в узле подачи тепловыделяющих элементов; и систему управления, выполненную с возможностью приема и отображения данных от указанного по меньшей мере одного датчика.
В одном из вариантов реализации настоящего изобретения верхняя и нижняя рамы в манипуляторе могут быть выполнены с возможностью крепления относительно стены участка сборки тепловыделяющих элементов.
Еще в одном варианте реализации настоящего изобретения модуль вертикального перемещения в манипуляторе может включать: раму модуля вертикального перемещения; каретку, выполненную с возможностью установки в верхней части рамы модуля вертикального перемещения и с возможностью перемещения относительно рамы модуля вертикального перемещения по третьим направляющим; второй универсальный привод, выполненный с возможностью установки в нижней части рамы модуля вертикального перемещения и с возможностью перемещения каретки; шток, отходящий от каретки параллельно раме модуля вертикального перемещения для стыковки с тепловыделяющим элементом; привод для вращения штока, установленный на каретке; электрический захват для тепловыделяющих элементов, выполненный с возможностью установки на каретке.
В другом варианте реализации настоящего изобретения по меньшей мере модуль вертикального перемещения в манипуляторе может быть снабжен обзорной видеокамерой.
В некотором другом варианте реализации настоящего изобретения модуль вертикального перемещения в манипуляторе может быть выполнен с возможностью приема чехла тепловыделяющей от внешнего робота, возможностью вертикального перемещения чехла тепловыделяющей сборки, возможностью стыковки со штоком тепловыделяющей сборки и возможностью откручивания или закручивания пробки тепловыделяющей сборки.
В иных вариантах реализации настоящего изобретения система управления в манипуляторе может быть выполнена с возможностью: формирования питающих напряжений манипулятора; формирования команд управления в соответствии с действиями оператора и передачи команд на манипулятор; вывода информации о состоянии основных параметров манипулятора; управления работой манипулятора через экранный графический интерфейс; контроля наличия связи с манипулятором; выдачи сообщений об ошибках и предупреждений оператору; приема видеосигналов от обзорных видеокамер, коммутации и захвата видео.
В контексте настоящего описания слова «первый», «второй», «верхний», «нижний» и т.д. используются в виде прилагательных исключительно для установления различий между существительными, к которым они относятся, а не для описания какой-либо конкретной связи между этими существительными.
Предлагаемый манипулятор отличается от вышеописанного наиболее близкого аналога тем, что его конструктивное исполнение, в частности компоновка его механизмов и приводов, обеспечивает возможность опускания чехла на собранный пучок тепловыделяющих элементов.
Технический результат, обеспечиваемый манипулятором согласно настоящему изобретению, заключается в расширении его функциональных возможностей счет реализованной в его конструкции компоновки механизмов и приводов, а также за счет использования быстроразъемных соединений, обеспечивающих надежную стыковку рам с аварийным (или внешним) роботом, выполняющим операции по перемещению, монтажу и демонтажу рам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
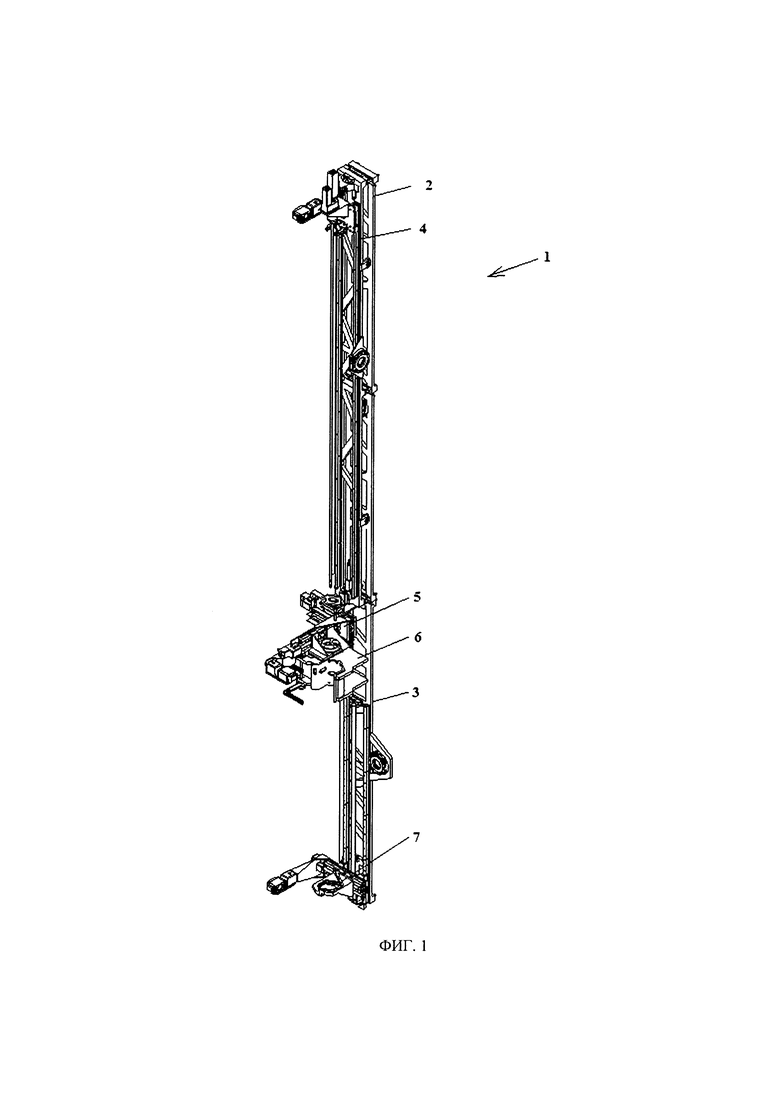
На ФИГ. 1 схематически показан общий вид манипулятора для сборки пучка тепловыделяющих элементов согласно настоящему изобретению.
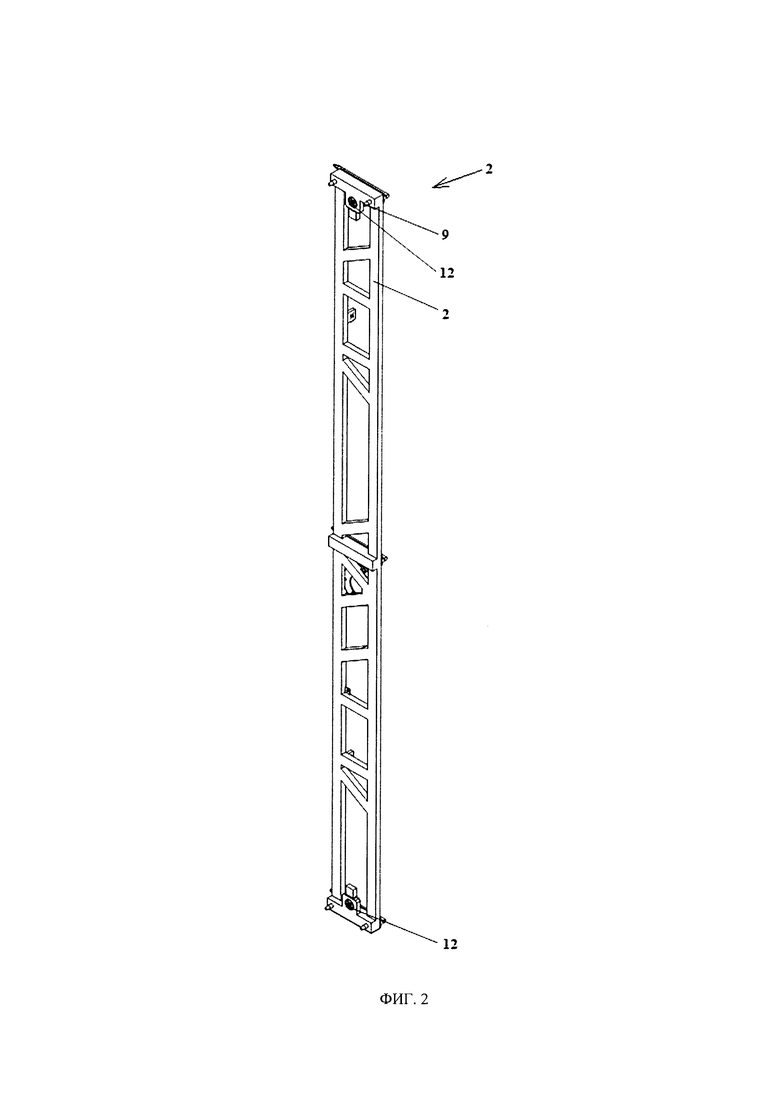
На ФИГ. 2 схематически показан общий вид верхней рамы манипулятора для сборки пучка тепловыделяющих элементов согласно настоящему изобретению.
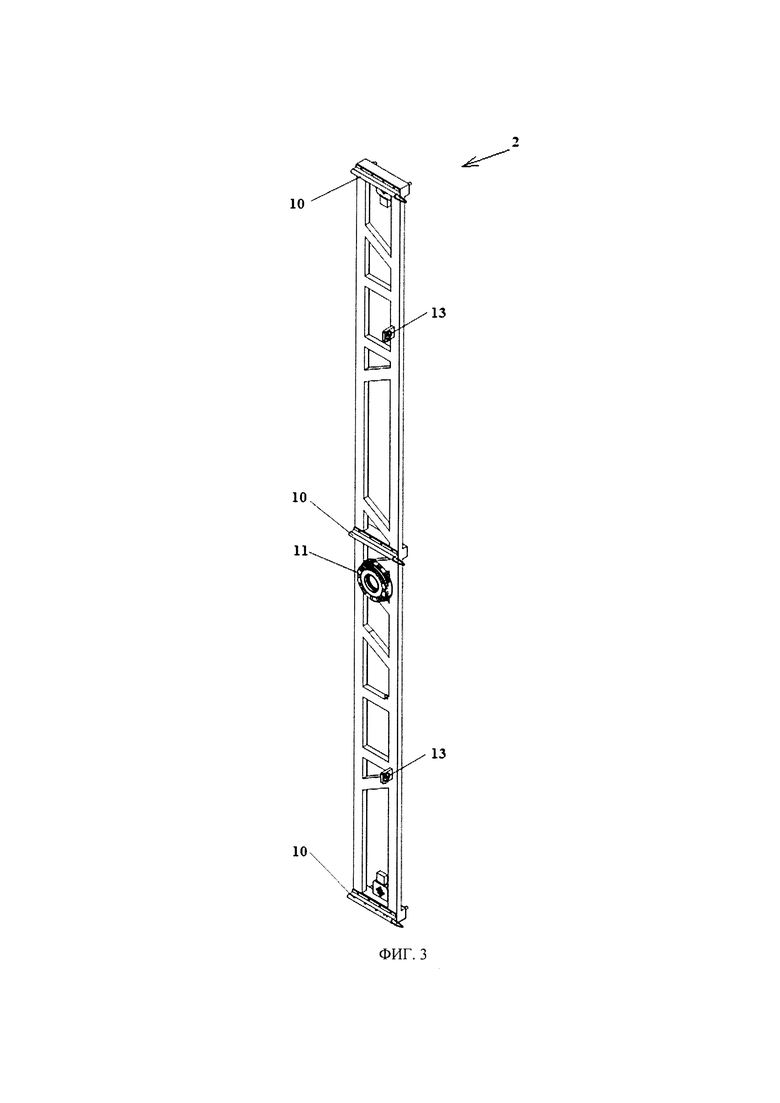
На ФИГ. 3 схематически показан общий вид верхней рамы манипулятора для сборки пучка тепловыделяющих элементов согласно настоящему изобретению.
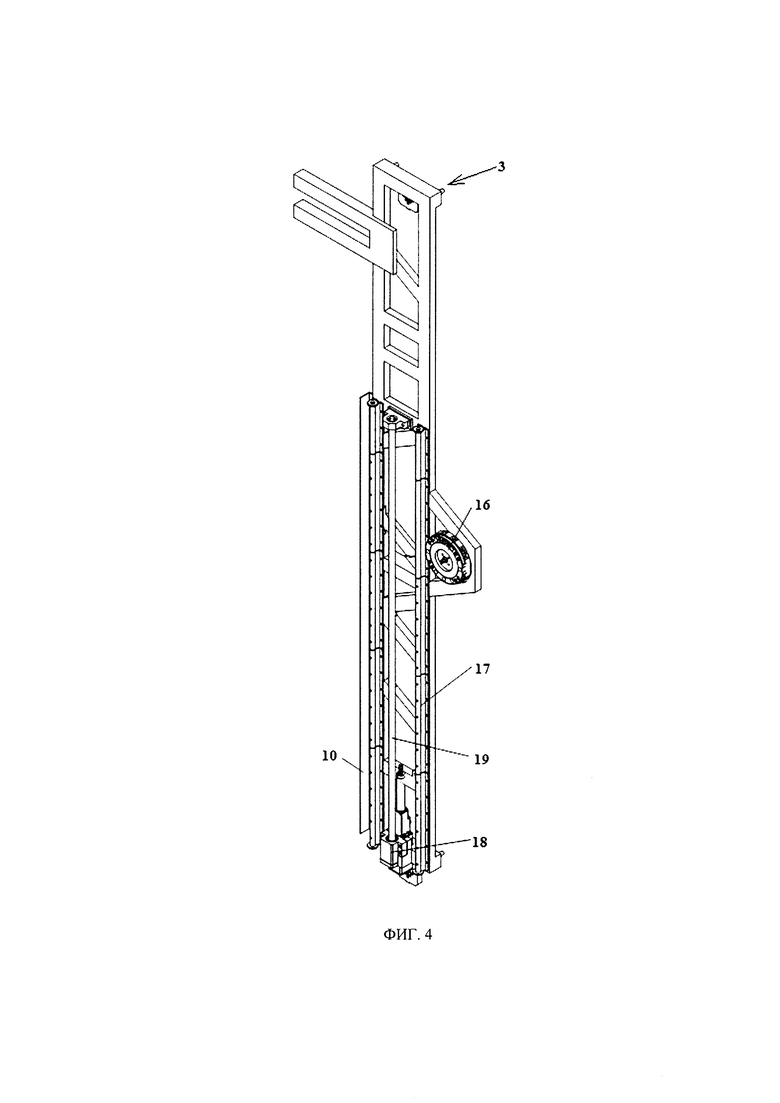
На ФИГ. 4 схематически показан общий вид нижней рамы манипулятора для сборки пучка тепловыделяющих элементов согласно настоящему изобретению.
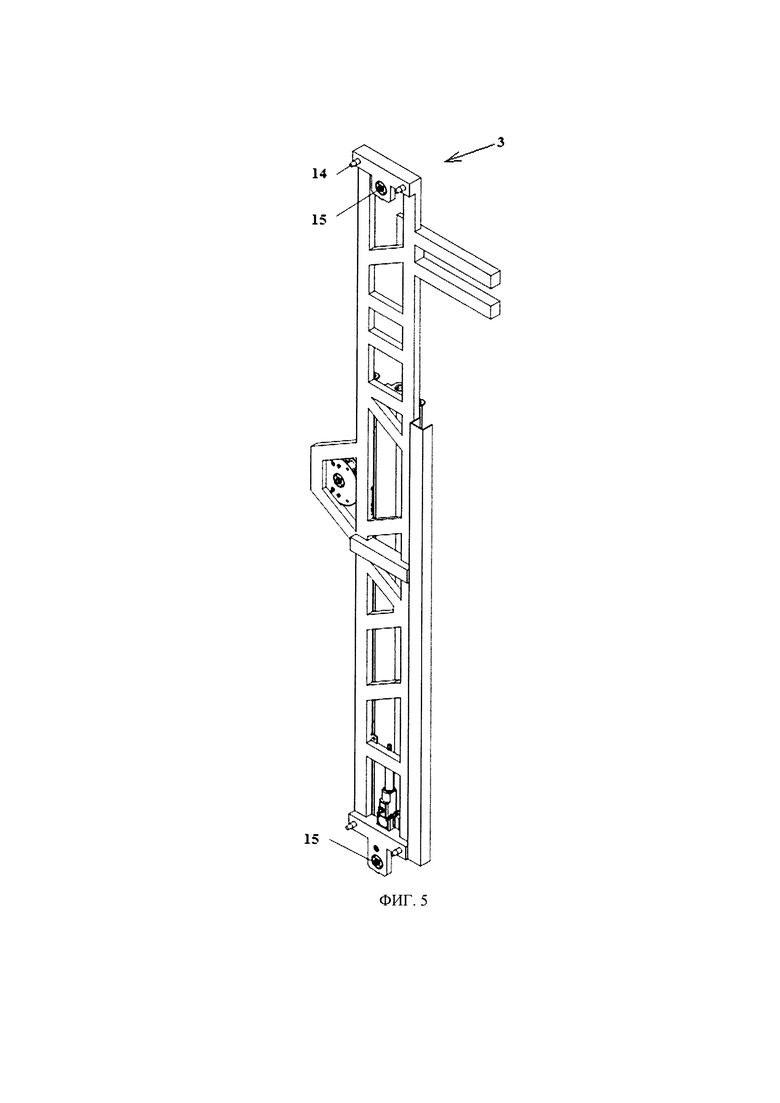
На ФИГ. 5 схематически показан общий вид нижней рамы манипулятора для сборки пучка тепловыделяющих элементов согласно настоящему изобретению.
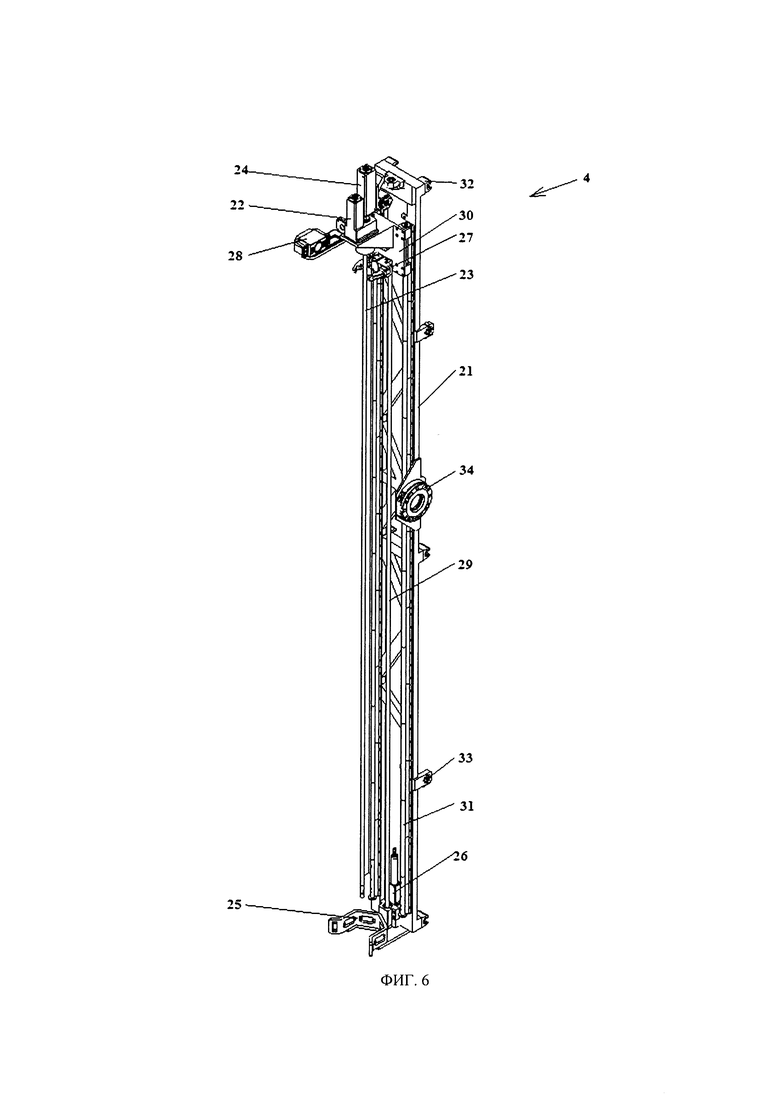
На ФИГ. 6 схематически показан общий вид модуля вертикального перемещения манипулятора для сборки пучка тепловыделяющих элементов согласно настоящему изобретению.
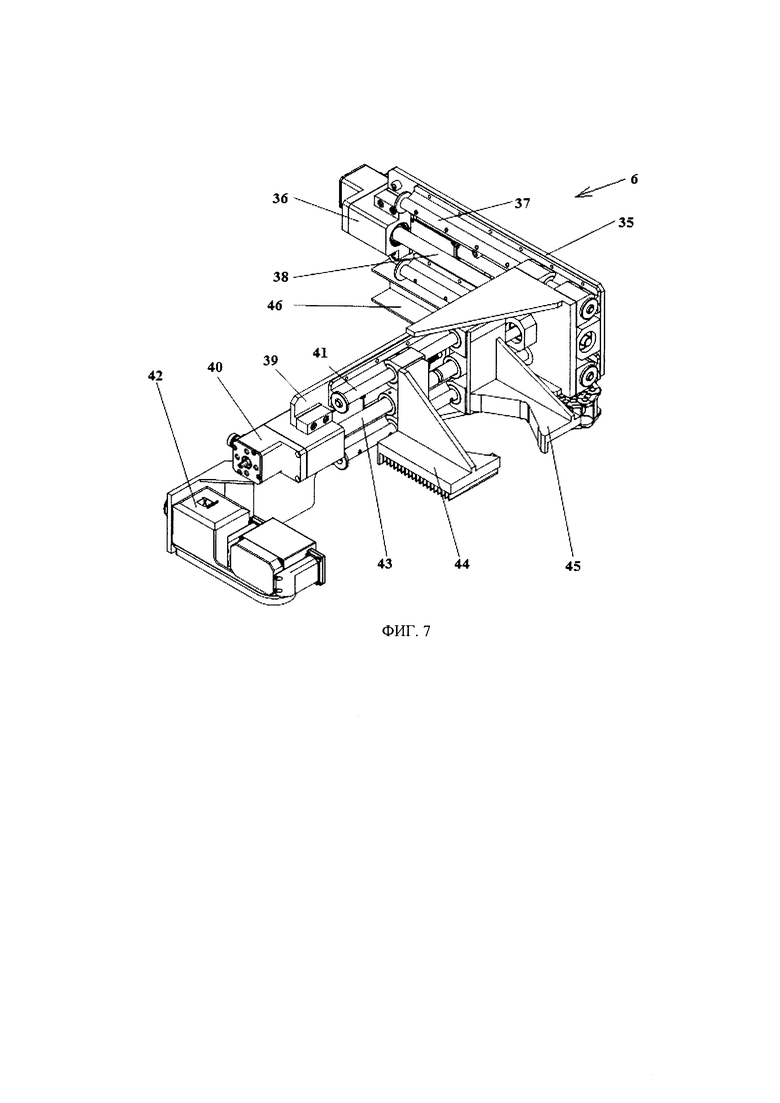
На ФИГ. 7 схематически показан общий вид узла подачи тепловыделяющих элементов манипулятора для сборки пучка тепловыделяющих элементов согласно настоящему изобретению.
На ФИГ. 8 схематически показан общий вид хомута манипулятора для сборки пучка тепловыделяющих элементов согласно настоящему изобретению.
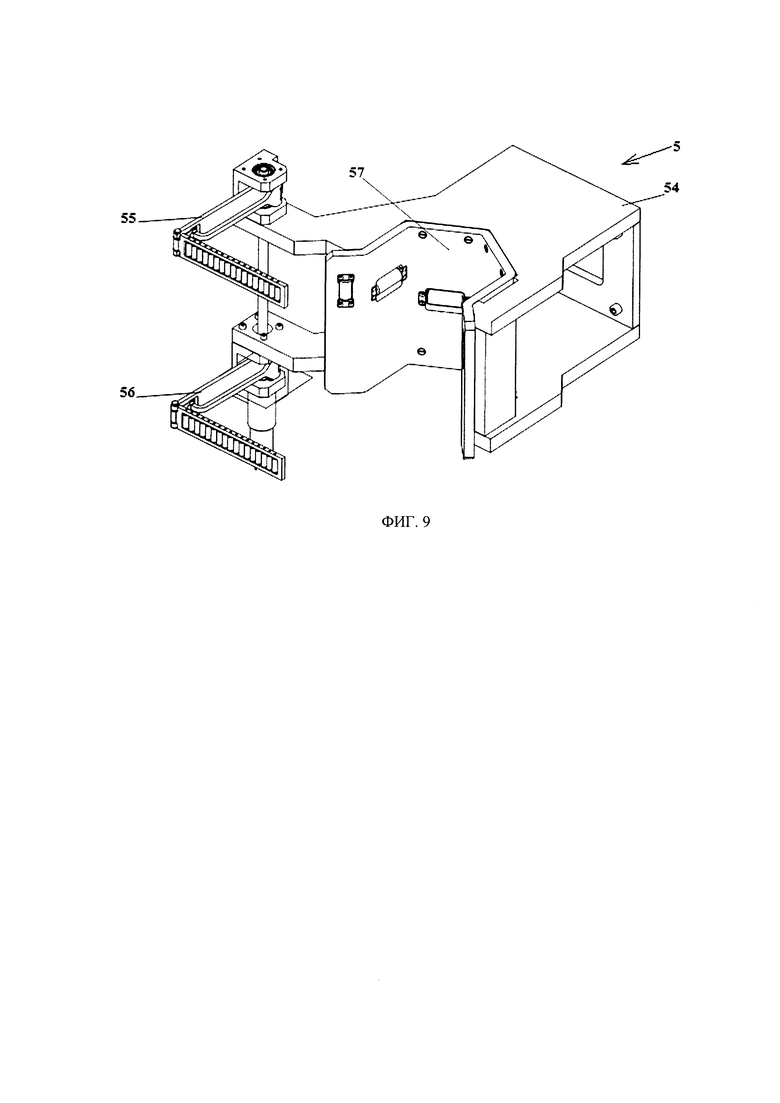
На ФИГ. 9 схематически показан общий вид толкателя манипулятора для сборки пучка тепловыделяющих элементов согласно настоящему изобретению.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее со ссылками на сопроводительные чертежи описан предпочтительный вариант реализации предлагаемого изобретения.
На ФИГ. 1 показан один из вариантов реализации манипулятора 1 для сборки пучка тепловыделяющих элементов согласно настоящему изобретению. Манипулятор 1, показанный на ФИГ. 1, содержит верхнюю раму 2, нижнюю раму 3, модуль 4 вертикального перемещения, толкатель 5, узел 6 подачи тепловыделяющих элементов, хомут 7 и локальную систему управления (не показана).
На ФИГ. 2-3 схематически показан общий вид верхней рамы 2, имеющей по существу прямоугольную форму с поперечными перекладинами, на которой установлены первые штыри 9; первые направляющие 10; быстроразъемное соединение 11, первые концевые крепежные средства 12, расположенные в концевых частях верхней рамы 2, и боковые крепежные средства 13, расположенные с одной продольной стороны верхней рамы 2. Первые штыри 9, концевые крепежные средства 12 и первое быстроразъемное соединение 11 обеспечивают установку и крепление верхней рамы 2 на стене участка сборки тепловыделяющих элементов. Быстроразъемное соединение 11 обеспечивает стыковку верхней рамы 2 с аварийным (или внешним) роботом (не показан), который выполняет операции по ее перемещению, монтажу и демонтажу.
Первые направляющие 10 предназначены для установки на них привода 14 вертикального перемещения.
Быстроразъемное соединение 11 может представлять собой любое подходящее быстроразъемное соединение, например может быть выполнено в виде быстроразъемного соединения, описанного в источнике US 20060175770, или может представлять собой другие быстроразъемные соединения, например быстроразъемные соединения с защелкивающимися или щелевидными соединительными элементами, в частности те быстроразъемные соединения такого типа, которые обеспечивают выдерживание высоких крутящих моментов.
На ФИГ. 4-5 схематически показан общий вид нижней рамы 3, имеющей по существу прямоугольную форму с поперечными перекладинами, на которой установлены вторые штыри 14, вторые концевые крепежные средства 15, второе быстроразъемное соединение 16, вторые направляющие 17, первый универсальный привод 18. Вторые штыри 14, вторые концевые крепежные средства 15 и второе быстроразъемное соединение 16 обеспечивают установку и крепление нижней рамы 3 на стене участка сборки тепловыделяющих элементов. Быстроразъемное соединение 16 обеспечивает стыковку нижней рамы 3 с аварийным (или внешним) роботом (не показан), который выполняет операции по ее перемещению, монтажу и демонтажу. Первый универсальный привод 18 обеспечивает вращение первого винта 19, по которому перемещается хомут 7. Установка хомута 7 осуществляется на вторые направляющие 17. Первый лоток 20 предназначен для дальнейшей укладки в него гибкого кабель канала, в котором проложены электрические кабели питания и управления приводами хомута в сборе.
Верхняя рама 2 выполнена с возможностью установки на нижнюю раму 3. Верхняя и нижняя рамы 2, 3 выполнены с возможностью крепления относительно стены участка сборки тепловыделяющих элементов и предназначены для установки механизмов манипулятора 1.
На ФИГ. 6 схематически показан общий вид модуля 4 вертикального перемещения, содержащего раму 21, на которой установлены гайковерт 22, шток 23, привод 24 вращения штока 23, направляющий кронштейн 25, второй универсальный привод 26, электрический захват 27, первая обзорная камера 28. Гайковерт 22 предназначен для откручивания/закручивания пробки тепловыделяющей сборки (не показана).
Следует понимать, что конструктивная схема тепловыделяющей сборки раскрыта в уровне техники и является по существу стандартном, отличия в конструктивных схемах минимальные и в только в рамках государственных стандартов, согласно которым тепловыделяющая сборка содержит пучок тепловыделяющих элементов, установленных в чехол, при этом между чехлом и пучком тепловыделяющих элементов имеется обойма, в концевой части тепловыделяющей сборки находится пробка, между чехлом и пробкой последовательно установлены переходник и хвостовик, шток тепловыделяющей сборки проходит внутри хвостовика по его продольной оси.
В состав гайковерта 22 входит датчик момента (не показан), предназначенный для контроля момента закручивания пробки тепловыделяющей сборки. Шток 23 представляет собой трубу с подпружиненным резьбовым наконечником, вращение штока 23 обеспечено приводом 24, благодаря чему при вращении штока 23 происходит его вкручивание в шток тепловыделяющей сборки. Направляющий кронштейн 25 позиционирует и предохраняет чехол тепловыделяющей сборки от повреждений при выполнении технологических операций по сборке тепловыделяющих элементов.
Второй универсальный привод 26 обеспечивает вращение второго винта 29, по которому перемещается каретка 30, установленная на третьи направляющие 31. Электрический захват 27 закреплен на каретке 30 и предназначен для удержания чехла тепловыделяющей сборки при выполнении технологических операций по сборке тепловыделяющих элементов.
Первая обзорная камера 28 установлена на каретке 30 и обеспечивает наблюдение за следующими процессами: захвата и фиксации чехла; откручивания/закручивания пробки тепловыделяющей сборки. Первая обзорная камера 28 обеспечивают выполнение следующих функций: формирование цветного изображения наблюдаемого объекта; обеспечение требуемого уровня освещенности наблюдаемого объекта; дистанционно управляемые функции: фокусировка, изменение диафрагмы, изменение интенсивности излучения осветителей насадок.
Первые кронштейны 32 и вторые боковые крепежные средства 33 используют для установки модуля 4 вертикального перемещения на установленные друг на друга верхнюю и нижнюю рамы 2, 3. Третье быстроразъемное соединение 34 используют для стыковки модуля 4 вертикального перемещения с аварийным (или внешним) роботом (не показан), который выполняет операции по его перемещению, монтажу и демонтажу.
На ФИГ. 7 схематически показан общий вид узла 6 подачи тепловыделяющих элементов манипулятора 1 для сборки пучка тепловыделяющих элементов согласно настоящему изобретению.
Узел 6 подачи тепловыделяющих элементов содержит плиту 35, установленную в верхней части нижней рамы 3 и на которой установлены третий универсальный привод 36 и четвертые направляющие 37. Третий универсальный привод 36 обеспечивает вращение третьего винта 38, по которому перемещается второй кронштейн 39, установленный на четвертые направляющие 37. Второй кронштейн 39 содержит установленные на нем четвертый универсальный привод 40, пятые направляющие 41, вторую обзорную камеру 42. Четвертый универсальный привод 40 вращает четвертый винт 43, по которому перемещаются гребень 44, упор 45, установленные на пятые направляющие 41. Четвертый винт 43 разделен на две части, резьба на которых нарезана в разных направлениях, что обеспечивает перемещение гребня 44 и упора 45 в противоположные стороны. Основание гребня 44 выполнено в виде решетки с направляющими, которые повторяют геометрию основания обоймы тепловыделяющей сборки, что позволяет при их стыковке выполнять перемещение тепловыделяющих элементов из основания гребня 44 в обойму тепловыделяющей сборки. Вторая обзорная камера 42 предназначена для наблюдения за процессами установки тепловыделяющих элементов в гребень 44 и перемещения тепловыделяющих элементов в обойму тепловыделяющей сборки. Второй лоток 46 предназначен для укладки в него гибкого кабель канала, в котором размещены электрические кабели питания и управления третьим универсальным приводом 36.
На ФИГ. 8 схематически показан общий вид хомута 7 манипулятора 1 для сборки пучка тепловыделяющих элементов согласно настоящему изобретению. Хомут 7 включает третий кронштейн 46, который устанавливается на вторые направляющие 17 нижней рамы 3 с использованием четвертых кронштейнов 47 и на котором размещены пятый универсальный привод 48, шестые направляющие 49, третья обзорная камера 50.
Пятый универсальный привод 48 обеспечивает вращение пятого винта 51, по которому перемещаются первая соединительная часть 52 хомута 7 и вторая соединительная часть 53 хомута 7. Пятый винт 51 разделен на две части, резьба на которых нарезана в разных направлениях, что обеспечивает перемещение первой соединительной части 52 хомута 7 и второй соединительной части 53 хомута 7 в противоположные стороны. Третья обзорная камера 50 предназначена для считывания штрих-кода тепловыделяющего элемента перед установкой его в гребень 44 узла 6 подачи тепловыделяющих элементов, а также наблюдения за процессом хомутирования пучка тепловыделяющих элементов с использованием первой соединительной части 52 хомута 7 и второй соединительной части 53 хомута 7.
На ФИГ. 9 схематически показан общий вид толкателя 5 манипулятора 1 для сборки пучка тепловыделяющих элементов согласно настоящему изобретению. Толкатель 5 содержит корпус 54, на котором установлены первая толкающая часть 55 и вторая толкающая часть 56, а также направляющий кронштейн 57. Первая толкающая часть 55 и вторая толкающая часть 56 выполнены с возможностью поворота таким образом, чтобы обеспечить перемещение ряда тепловыделяющих элементов из гребня 44 узла 6 подачи тепловыделяющих элементов в обойму тепловыделяющей сборки. Направляющий кронштейн 57 предназначен для позиционирования и предохранения чехла тепловыделяющей сборки от повреждений при проведении технологических операций по сборке тепловыделяющих элементов.
Манипулятор 1 функционирует следующим образом. При нахождении манипулятора 1 в своем исходном положении электрический захват 27 находится в верхней точке без чехла, а затем чехол с хвостовиком подается в положении хвостовиком вверх от внешнего робота.
Манипулятор 1 обеспечивает выполнение следующих технологических операций: передачу чехла без пучка тепловыделяющих элементов от внешнего робота манипулятору 1; контроль прилегания торца пробки и торца штока; установку пучка тепловыделяющих элементов в обойму тепловыделяющей сборки; очехловывание пучка тепловыделяющих элементов сборку пучка тепловыделяющих элементов с чехлом; передачу чехла с установленным пучком тепловыделяющих элементов внешнему роботу.
Более конкретно, от внешнего робота чехол тепловыделяющей сборки с установленными штоком тепловыделяющей сборки и обоймой тепловыделяющей сборки подается в вертикальном положении хвостовиком вверх к электрическому захвату 27 манипулятора 1. Происходит передача чехла тепловыделяющей сборки манипулятору 1.
Дополнительно с использованием специального оборудования (на чертежах не изображено) осуществляется контроль прилегания торца штока 23 к торцу пробки путем измерения расстояния от торца пробки до торца штока 23 в четырех точках, находящихся на плоскости торца штока 23, по внешнему диаметру торца штока 23, под углом 0°, 90°, 180° и 270°.
Далее осуществляются операции по стыковке штока 23 манипулятора 1 со штоком тепловыделяющей сборки путем вкручивания во внутреннюю резьбу штока тепловыделяющей сборки. Внутренняя резьба находится в верхней части штока тепловыделяющей сборки.
После стыковки со штоком 23 тепловыделяющей сборки производится откручивание пробки гайковертом 22 манипулятора 1 и выдвижение обоймы за нижнюю кромку чехла для установки тепловыделяющих элементов в обойму путем перемещения чехла тепловыделяющей сборки относительно штока тепловыделяющей сборки. Таким образом, обойма тепловыделяющей сборки выходит за пределы чехла, благодаря чему обеспечивается установка тепловыделяющих элементов в обойму. Таким образом, чехол тепловыделяющей сборки фиксируется на расстоянии приблизительно 0,5 м от нижней кромки чехла тепловыделяющей сборки. Гребень 44 при помощи четвертого универсального привода 40 подводится к обойме тепловыделяющей сборки для установки в нее тепловыделяющих элементов.
Использование внешнего робота обеспечивает возможность поштучного размещения тепловыделяющих элементов в гребне 44 и с использованием толкателя 7 обеспечено перемещение тепловыделяющего элемента по направляющим гребня 44 и направляющим обоймы тепловыделяющей сборки до полной установки тепловыделяющего элемента в обойму тепловыделяющей сборки в соответствии с картограммой установки тепловыделяющих элементов.
Таким образом, происходит поштучное последовательное формирование пучка тепловыделяющих элементов в обойме тепловыделяющей сборки. После установки всех тепловыделяющих элементов в обойму осуществляется фиксация верхней части пучка тепловыделяющих элементов хомутом 7 и очехловывание сформированного пучка тепловыделяющих элементов с обеспечением контроля усилия надвигания чехла на пучок тепловыделяющих элементов.
Очехловывание производится в несколько этапов:
Этап 1. Опускание чехла до захода обоймы тепловыделяющей сборки с установленными тепловыделяющими элементами в чехол тепловыделяющей сборки на глубину, обеспечивающую заход верхних частей тепловыделяющих элементов в чехол тепловыделяющей сборки и предотвращающую выпадение тепловыделяющих элементов из обоймы тепловыделяющей сборки. В частности, указанная глубина составляет приблизительно ~ 0,1 м.
Этап 2. Перемещение хомута 7 на первое расстояние 1 м от нижней кромки чехла тепловыделяющей сборки и хомутирование пучка тепловыделяющих элементов на указанном первом расстоянии.
Этап 3. Опускание чехла тепловыделяющей сборки до верхней кромки хомута 7.
Этап 4. Перемещение хомута 7 на второе расстояние 1,5 м от нижней кромки чехла тепловыделяющей сборки и хомутирование пучка тепловыделяющих элементов на указанном втором расстоянии.
Этап 5. Опускание чехла тепловыделяющей сборки до верхней кромки хомута 7, раскрытие хомута 7, а именно первой соединительной части 52 и второй соединительной части 53, и дальнейшее опускание чехла тепловыделяющей сборки до полной установки пучка тепловыделяющих элементов в чехол тепловыделяющей сборки.
Далее на шток тепловыделяющей сборки накручивается пробка с контролем усилия закручивания.
Шток тепловыделяющей сборки расстыковывается со штоком 23 манипулятора 1. Осуществляется контроль прилегания торца штока к торцу пробки путем измерения расстояния от торца пробки до торца штока в четырех точках, находящихся на плоскости торца штока, по внешнему диаметру торца штока, под углом 0°, 90°, 180° и 270°.
Чехол с установленным в него пучком твэлов передается внешнему роботу для проведения последующих операций по сборке тепловыделяющей сборки.
Модификации и усовершенствования вышеописанных вариантов осуществления настоящей технологии могут быть очевидны для специалистов в данной области техники. Приведенные выше примеры осуществления не ограничивают объем охраны предлагаемого изобретения. Объем предлагаемого изобретения ограничивается только объемом прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАМЕРА ДЛЯ РАЗДЕЛКИ ДВУХПУЧКОВЫХ ТОПЛИВНЫХ СБОРОК ЯДЕРНОГО РЕАКТОРА | 1990 |
|
SU1819479A3 |
| СПОСОБ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ РЕАКТОРА РБМК-1000 И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490734C1 |
| СПОСОБ РАЗДЕЛКИ ДВУХПУЧКОВОЙ ТОПЛИВНОЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА ДЛЯ ЕЁ ПОСЛЕДУЮЩЕГО ХРАНЕНИЯ И КАМЕРА РАЗДЕЛКИ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2002 |
|
RU2219605C2 |
| СПОСОБ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ РЕАКТОРА РБМК-1000 И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491665C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ЧАСТИЧНО ПОВРЕЖДЕННОЙ ДВУХПУЧКОВОЙ ТОПЛИВНОЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА, КАМЕРА ДЛЯ РАЗДЕЛКИ И ФАЛЬШТВЭЛ ДЛЯ ВОССТАНОВЛЕНИЯ ТОПЛИВНОЙ СБОРКИ | 1992 |
|
RU2072569C1 |
| СПОСОБ И УСТАНОВКА ДЛЯ РАЗДЕЛКИ ОТРАБОТАВШЕЙ ТОПЛИВНОЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА | 2001 |
|
RU2208849C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК ЯДЕРНОГО РЕАКТОРА (ВАРИАНТЫ) | 2001 |
|
RU2215632C2 |
| СПОСОБ РАЗДЕЛКИ ОТРАБОТАВШЕЙ ДВУХПУЧКОВОЙ ТОПЛИВНОЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА ДЛЯ ПОСЛЕДУЮЩЕГО ХРАНЕНИЯ И КАМЕРА РАЗДЕЛКИ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1999 |
|
RU2171508C2 |
| ЗАХВАТ ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ КОРПУСА АМПУЛЫ С ПУЧКОМ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2013 |
|
RU2511118C1 |
| ГЕРМЕТИЧНЫЙ ПЕНАЛ ХРАНЕНИЯ ОТРАБОТАВШЕГО ЯДЕРНОГО ТОПЛИВА РЕАКТОРА РБМК-1000 | 2013 |
|
RU2562055C2 |

Изобретение относится к области ядерной энергетики, в частности к манипуляторам для сборки пучка тепловыделяющих элементов. Манипулятор содержит: верхнюю раму, включающую первые направляющие и первое быстроразъемное соединение; нижнюю раму, включающую вторые направляющие, второе быстроразъемное соединение и первый универсальный привод. Манипулятор также содержит модуль вертикального перемещения, выполненный с возможностью установки на верхней раме и возможностью стыковки с тепловыделяющим элементом. Узел подачи тепловыделяющих элементов выполнен с возможностью установки на верхней части нижней рамы и с возможностью последовательного приема тепловыделяющих элементов. Хомут установлен в нижней части нижней рамы и выполнен с возможностью фиксации пучка тепловыделяющих элементов. Толкатель выполнен с возможностью установки на верхней части нижней рамы и с возможностью перемещения тепловыделяющих элементов из узла подачи тепловыделяющих элементов в хомут. Датчик выполнен с возможностью установки в узле подачи тепловыделяющих элементов. Система управления выполнена с возможностью приема и отображения данных от датчика. Изобретение позволяет расширить функциональные возможности манипулятора. 5 з.п. ф-лы, 9 ил.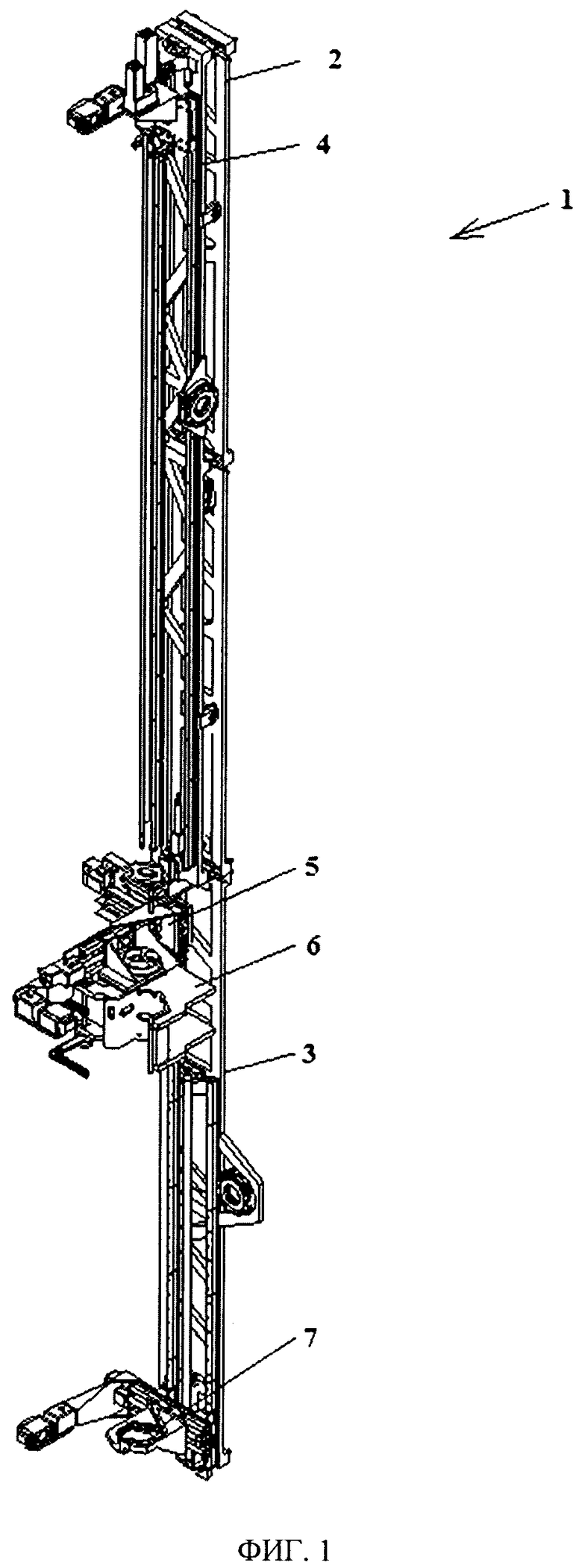
1. Манипулятор для сборки пучка тепловыделяющих элементов, содержащий: верхнюю раму, включающую первые направляющие и первое быстроразъемное соединение;
нижнюю раму, включающую вторые направляющие, второе быстроразъемное соединение и первый универсальный привод; при этом верхняя рама выполнена с возможностью установки на нижнюю раму;
модуль вертикального перемещения, выполненный с возможностью установки на верхней раме и стыковки с тепловыделяющим элементом;
узел подачи тепловыделяющих элементов, выполненный с возможностью установки на верхней части нижней рамы и с возможностью последовательного приема тепловыделяющих элементов;
хомут, установленный в нижней части нижней рамы и выполненный с возможностью фиксации пучка тепловыделяющих элементов;
толкатель, выполненный с возможностью установки на верхней части нижней рамы и с возможностью перемещения тепловыделяющих элементов из узла подачи тепловыделяющих элементов в хомут;
по меньшей мере один датчик, выполненный с возможностью установки по меньшей мере в узле подачи тепловыделяющих элементов; и
систему управления, выполненную с возможностью приема и отображения данных от указанного по меньшей мере одного датчика.
2. Манипулятор по п. 1, в котором верхняя и нижняя рамы выполнены с возможностью крепления относительно стены участка сборки тепловыделяющих элементов.
3. Манипулятор по п. 1, в котором модуль вертикального перемещения включает: раму модуля вертикального перемещения;
каретку, выполненную с возможностью установки в верхней части рамы модуля вертикального перемещения и с возможностью перемещения относительно рамы модуля вертикального перемещения по третьим направляющим;
второй универсальный привод, выполненный с возможностью установки в нижней части рамы модуля вертикального перемещения и с возможностью перемещения каретки;
шток, отходящий от каретки параллельно раме модуля вертикального перемещения для стыковки с тепловыделяющим элементом;
привод для вращения штока, установленный на каретке;
электрический захват для тепловыделяющих элементов, выполненный с возможностью установки на каретке.
4. Манипулятор по п. 1, в котором по меньшей мере модуль вертикального перемещения снабжен обзорной видеокамерой.
5. Манипулятор по п. 1, в котором модуль вертикального перемещения выполнен с возможностью приема чехла тепловыделяющей сборки от внешнего робота, возможностью вертикального перемещения чехла тепловыделяющей сборки, возможностью стыковки со штоком тепловыделяющей сборки и возможностью откручивания или закручивания пробки тепловыделяющей сборки.
6. Манипулятор по п. 1, в котором система управления выполнена с возможностью:
формирования питающих напряжений манипулятора;
формирования команд управления в соответствии с действиями оператора и передачи команд на манипулятор;
вывода информации о состоянии основных параметров манипулятора; управления работой манипулятора через экранный графический интерфейс; контроля наличия связи с манипулятором; выдачи сообщений об ошибках и предупреждений оператору; и
приема видеосигналов от обзорных видеокамер, коммутации и захвата видео.
| US 20110164718 A1, 07.07.2011 | |||
| Манипулятор для топливных и регулирующих стержней ядерного реактора | 1974 |
|
SU677687A3 |
| МАНИПУЛЯТОР ДЛЯ ДОСТАВКИ РАБОЧИХ ОРГАНОВ | 1992 |
|
RU2024970C1 |
| Низколегированная инструментальная сталь | 1961 |
|
SU144514A1 |
| ЗАХВАТ ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ КОРПУСА АМПУЛЫ С ПУЧКОМ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2013 |
|
RU2511118C1 |
| СПОСОБ ЗАЩИТЫ СТАЛИ ОТ СЕРОВОДОРОДНОЙ КОРРОЗИИ | 2006 |
|
RU2354752C2 |
