Предлагаемое изобретение относится к военной технике, касается боевого модуля со стабилизацией линии прицеливания вооружения, который может быть использован на унифицированных колесных или гусеничных тяжелых и средних платформах бронетанковой техники для стабилизации линии прицеливания пулеметного или артиллерийского вооружения.
При движении шасси бронетанковой техники по пересеченной местности на вооружение действуют внешние возмущения в виде колебаний корпуса шасси, трения в цапфах (опорах) вооружения, а также возмущения, обусловленные неуравновешенностью вооружения относительно оси цапф. Эти возмущения вызывают отклонение вооружения от заданного сигналом датчика положения вертикального наведения. Угол между заданным и действительным направлением вооружения в вертикальной плоскости в этом случае определяет ошибку стабилизации привода вертикального наведения.
Полученная таким образом ошибка стабилизации привода вертикального наведения обрабатывается с учетом сигналов, полученных от внешних устройств модулем управления стабилизатора, сигналы с которого управляют приводом вертикального наведения, тем самым обеспечивая поворот вооружения относительно боевого модуля, в направлении уменьшения рассогласования между заданным значением сигнала с датчика положения вертикального наведения и истинным положением вооружения в плоскости вертикального наведения.
Известен боевой модуль со стабилизатором вооружения типа 2Э52, стоящий на боевой машине пехоты БМП-3, подсоединяемый к прицелам наводчика и командира и к баллистическому вычислителю системы управления огнем комплекса вооружения боевого модуля и включающий пульт управления наводчика и пульт управления командира, соединенные с блоком управления стабилизатором, выходы которого соединены соответственно с последовательно соединенными усилителем мощности, исполнительным двигателем по горизонтальному каналу и с усилителем мощности по вертикальному каналу, а также двигатель исполнительный и датчик положения оружия по вертикальному каналу наведения /6. Бронетанковое вооружение и техника (Том VII. Энциклопедия XXI век. Оружие и технологии России. М., изд. дом «Оружие и технологии», 2003, стр. 359).
Недостатками комплекса вооружения БМП-3, выявленными при эксплуатации, являются следующие: низкая точность прицеливания наводчика, в особенности в условиях стрессовых ситуаций, возникающих в боевой обстановке, а также при наличии механических возмущений на его рабочем месте. Недостатком указанного модуля являются недостаточные быстродействие и точность отработки динамичных сигналов в новых условиях боевого применения, в частности, при стрельбе по скоростным целям, недостаточная точность стабилизации вооружения при стрельбе с ходу. Так, согласно приведенному описанию [Комплекс вооружения 2К23 боевой машины пехоты БМП-3. Техническое описание и инструкция по эксплуатации. Тула, КБП, 1991, стр.1-10.], скорости наведения оружия в режиме «Автомат» составляют 0,025-(5-5)°/с, 0,025-(5-9)°/с соответственно по вертикальному и горизонтальному каналам, 0,1-35°/с - в режиме «Полуавтомат» (при стрельбе через ракурсные прицелы), срединная ошибка стабилизации вооружения при движении БМП по стандартной трассе - Ест=0,5 т.д. Согласно ТЗ на новое боевое отделение максимальная скорость наведения оружия в режиме «Автомат» составляет 35°/с, точность стабилизации оружия Ест≤0,4 т.д. Кроме того, требуется высокое быстродействие при переключении из одного режима в другой, количество которых возросло вследствие усовершенствования состава системы управления огнем и расширения номенклатуры оружия и боеприпасов.
Известна система стабилизации с зависимой линией прицеливания, в которой гироскопы (гироскопические датчики) установлены на люльке (качающаяся часть) и корпусе боевого модуля. При этом гироскопический датчик, установленный на люльке (качающейся части боевого модуля), отвечает за вертикальное наведение и перемещается вместе с вооружением боевого модуля в вертикальной плоскости при наведении по вертикали. Гироскопический датчик, установленный на корпусе боевого модуля, отвечает за горизонтальное наведение и перемещается по горизонту вместе с корпусом боевого модуля (US 3844196 A, кл. G05D1/08, F41G5/16, G01C19/00, G01C19/02, G01C21/10, опубл. 29.10.1974 г.).
Недостатком указанной системы стабилизации является то, что гироскопы используются для определения положения люльки и корпуса боевого модуля. При применении этой системы на вооружении возникают относительно высокие амплитуды частоты угловых колебаний ствола, возникающие вследствие движения и ударов подвижных частей и отдачи оружия при выстреле, и ранее недооцененная степень встречающихся структурных резонансов, которые влияют на точность и реакцию такой системы.
Необходимо также отметить, что отдача и вибрация ствола оказывают весьма существенное влияние на меткость при стрельбе. Стволы огнестрельного оружия приходят при стрельбе в колебательное движение. Моменты сил, обуславливающие вибрацию ствола стрелкового оружия, определяются: силой отдачи, действующей на упор отдачи (элемент, выполняющий его функции); ударом затвора, действующим на боевые упоры люльки в станке корпуса боевого модуля. Угловые колебания ствола, возникающие вследствие движения и ударов подвижных частей и отдачи оружия, приводят к рассеиванию пуль по боковому направлению и дальности (высоте), оказывают наибольшее влияние на величину площади рассеивания при стрельбе. Колебания корпуса БМ носят случайный характер и при его движении никогда не затухают. Это приводит к значительным перемещениям прицельной марки относительно цели. Наибольшее влияние на точность стрельбы оказывают колебания БМ в продольной плоскости и угловые колебания в горизонтальной плоскости, изменяющие угол горизонтального наведения. Они приводят к значительному рассеиванию при стрельбе. Точность стрельбы с ходу снижается также и вследствие непрерывного изменения дальности до цели.
В стабилизаторах линии прицеливания стабилизируется поле зрения прицела, поэтому при движении боевой машины видимые в поле зрения прицела перемещения целей, местных предметов относительно прицельных марок становятся незначительными.
Условия наведения значительно улучшаются, и ошибки наведения уменьшаются. Однако оружие в этом случае не стабилизировано, оно колеблется вместе с корпусом боевой машины, поэтому все остальные причины, обусловливающие уменьшение меткости, продолжают действовать. В стабилизаторах линии выстрела стабилизируются угол возвышения (угол вертикального наведения) и угол места цели (угол горизонтального наведения)
орудия. При движении боевой машины параметры угловых колебаний орудия значительно уменьшаются, и его направление на цель, с определённой точностью, остаётся неизменным. Благодаря этому значительно уменьшается влияние на точность стрельбы остальных факторов, повышающих рассеивание снарядов, а именно - запаздывание выстрела и изменение вектора начальной скорости снаряда.
В прицелах современных боевых машин управление линией прицеливания совмещается с линией выстрела. Линия прицеливания при этом стабилизируется или независимо от оружия (с помощью автономного стабилизатора линии прицеливания), или вместе с ней (с помощью стабилизатора оружия (башни). В первом случае получаем так называемую независимую линию прицеливания, во втором - зависимую от оружия линию прицеливания.
В современных системах управления огнем применяются только двухплоскостные стабилизаторы. Стабилизация ствола оружия в вертикальной плоскости обеспечивается с помощью стабилизатора качающейся части оружия, а в горизонтальной плоскости - с помощью стабилизатора башни.
Стабилизатор качающейся части оружия называют также стабилизатором ВН (стабилизатором в плоскости вертикального наведения), стабилизатор башни - стабилизатором ГН (стабилизатор в плоскости горизонтального наведения).
Принципы работы приводов ВН и ГН в режимах стабилизации и стабилизированного наведения во многом схожи. Каждый из этих двух приводов представляет собой систему автоматического регулирования, работа которой основана на принципе отработки рассогласования (ошибки), т.е. на сравнении действительного значения регулируемого параметра с его заданным значением.
За ближайший аналог (прототип) принят боевой модуль дистанционно управляемой разведывательно-боевой платформы ДПВ-РБП.00.00.00.00-04, предназначенной для установки в боевых машинах на колесном или гусеничном шасси, содержащий поворотную платформу с корпусом боевого модуля, соединенную с неподвижным основанием при помощи опорно-поворотного устройства, представляющего собой радиально-опорный подшипник, стабилизатор вооружения с зависимой линией прицеливания вооружения, включающий задающее устройство стабилизатора в виде модуля оптико-электронного для формирования линии прицеливания, гиротахометр вертикального наведения с блоком управления и гиротахометр горизонтального наведения с блоком управления, привод вертикального наведения вооружения, электрически связанный с блоком управления гиротахометра вертикального наведения, привод горизонтального наведения вооружения, электрически связанный с блоком управления гиротахометра горизонтального наведения, в котором гиротахометр вертикального наведения размещен на качающейся части с вооружением боевого модуля, а гиротахометр горизонтального наведения размещен на поворотной платформе корпуса боевого модуля.
Недостатком устройства по прототипу является то, что при указанном варианте размещения гиротахометров колебания и резонансные частоты при колебании металлоконструкции корпуса боевого модуля и качающейся части оружия боевого модуля влияют на показания гиротахометра вертикального наведения и гиротахометра горизонтального наведения, определяющих параметры перемещения шасси (носителя) боевого модуля, что снижает скорость выработки сигналов для стабилизации линии прицеливания вооружения боевого модуля при стрельбе с ходу по движущимся целям и ухудшает меткость боя вооружения.
В задачу изобретения положено повышение меткости боя вооружения боевого модуля при стрельбе с ходу по движущимся целям, снижение влияния высокочастотных и резонансных частот колебаний частей боевого модуля, влияющих на работу стабилизатора линии прицеливания вооружения.
Техническим результатом от использования изобретения является повышение меткости боя вооружения при стрельбе с ходу по движущимся целям за счет усовершенствования стабилизатора боевого модуля с зависимой стабилизацией линии прицеливания вооружения, устраняющее указанные недостатки, а именно уменьшение влияния на показания гиротахометра вертикального наведения и гиротахометра горизонтального наведения, определяющих параметры перемещения шасси (носителя) боевого модуля и линии прицеливания вооружения при колебаниях металлоконструкции корпуса боевого модуля на поворотной платформе и качающейся части оружия боевого модуля при стрельбе в движении шасси боевого модуля, увеличения точности стабилизации зависимой линии прицеливания вооружения за счет уменьшения ошибки стабилизации при снижении влияния высокочастотных и резонансных частот частей боевого модуля на работу стабилизатора вооружения по вертикали и горизонтали.
Поставленная задача достигается тем, что боевой модуль со стабилизацией линии прицеливания вооружения содержит неподвижное основание, жестко закрепленное на шасси боевой машины, поворотную платформу, опорно-поворотное устройство, качающуюся часть с вооружением и с зубчатым сектором качающейся части, станок для установки и крепления качающейся части, защитный корпус, стабилизатор с зависимой линией прицеливания вооружения, включающий гиротахометр горизонтального наведения, блок управления гиротахометра горизонтального наведения, гиротахометр вертикального наведения, блок управления гиротахометра вертикального наведения, привод горизонтального наведения вооружения с шестерней привода горизонтального наведения вооружения, привод вертикального наведения вооружения с шестерней привода вертикального наведения вооружения и модуль оптико-электронный, при этом неподвижное основание соединено с поворотной платформой через опорно-поворотное устройство, представляющее собой радиально-опорный подшипник с зубчатым венцом, поворотная платформа выполнена в виде металлоконструкции с посадочными местами под станок для установки и крепления качающейся части с вооружением и с посадочными местами под приводы горизонтального и вертикального наведения вооружения, качающаяся часть с вооружением выполнена в виде металлоконструкции, на которой через посадочные места установлен зубчатый сектор качающейся части, а на оси качания закреплены цапфы с обоймами, при этом качающаяся часть с вооружением установлена и закреплена на станке для установки и крепления качающейся части с вооружением и закрыта защитным корпусом, гиротахометр горизонтального наведения электрически связан с блоком управления гиротахометра горизонтального наведения и модулем оптико-электронным, гиротахометр вертикального наведения электрически связан с блоком управления гиротахометра вертикального наведения и модулем оптико-электронным, блок управления гиротахометра горизонтального наведения электрически связан с приводом горизонтального наведения вооружения и с модулем оптико-электронным, блок управления гиротахометра вертикального наведения электрически связан с приводом вертикального наведения вооружения и модулем оптико-электронным, шестерня привода горизонтального наведения вооружения установлена с возможностью постоянного взаимодействия путем зацепления с зубчатым венцом опорно-поворотного устройства, шестерня привода вертикального наведения вооружения установлена с возможностью постоянного взаимодействия путем зацепления с зубчатым сектором качающейся части с вооружением, модуль оптико-электронный, в котором формируется линия прицеливания, жестко закреплен на оси цапф качающейся части с вооружением и электрически связан гиротахометрами горизонтального и вертикального наведения, с блоками управления гиротахометрами горизонтального и вертикального наведения, с приводами горизонтального и вертикального наведения вооружения, причем гиротахометр горизонтального наведения установлен и закреплен на неподвижном основнии, а гиротахометр вертикального наведения установлен и жестко закреплен на поворотной платформе; в качестве гиротахометра горизонтального наведения и гиротахометра вертикального наведения используются гироскопические датчики угловой скорости, представляющие собой волоконно-оптические гироскопы, измеряющие абсолютную относительно инерциального пространства угловую скорость, при этом в гиротахометре горизонтального наведения ось катушки оптоволокна выполнена ориентированной вертикально относительно горизонтальной плоскости части неподвижного основания, а в гиротахометре вертикального наведения ось катушки оптоволокна выполнена ориентированной горизонтально относительно поверхности неподвижного основания; неподвижное основание боевого модуля жестко закреплено с помощью болтов на усиленной части несущего корпуса шасси боевой машины; модуль оптико-электронный для формирования линии прицеливания на качающейся части вооружения выполнен с блоком объектива видеокамеры и дальномером, при этом на экране монитора оператора стрельбы формируется видеоизображение фоно-целевой обстановки в любое время суток, формируется наложение на видеоизображение прицельных знаков для обеспечения наведения вооружения на цель.
На фиг. 1 представлен общий вид боевого модуля со стабилизацией линии прицеливания вооружения, где А - линия прицеливания вооружения.
На фиг. 2 представлен вид сверху боевого модуля со стабилизацией линии прицеливания вооружения на шасси боевой машины, где А - линия прицеливания вооружения.
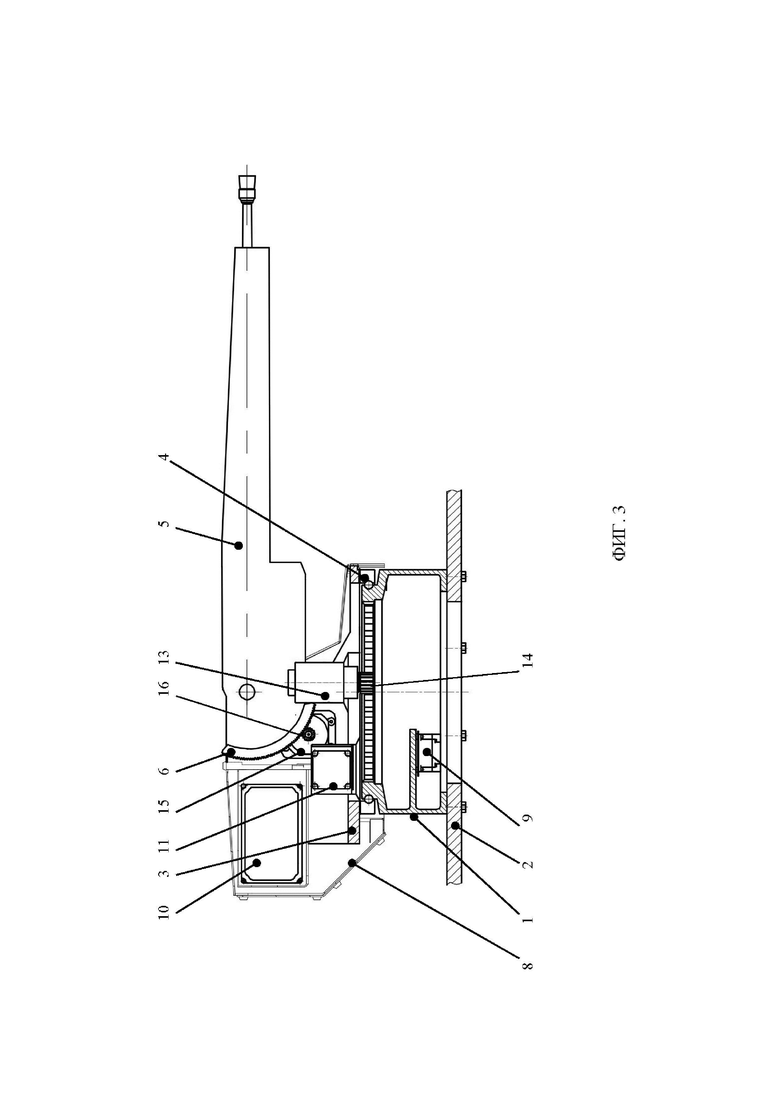
На фиг. 3 представлен вертикальный разрез боевого модуля со стабилизацией линии прицеливания вооружения.
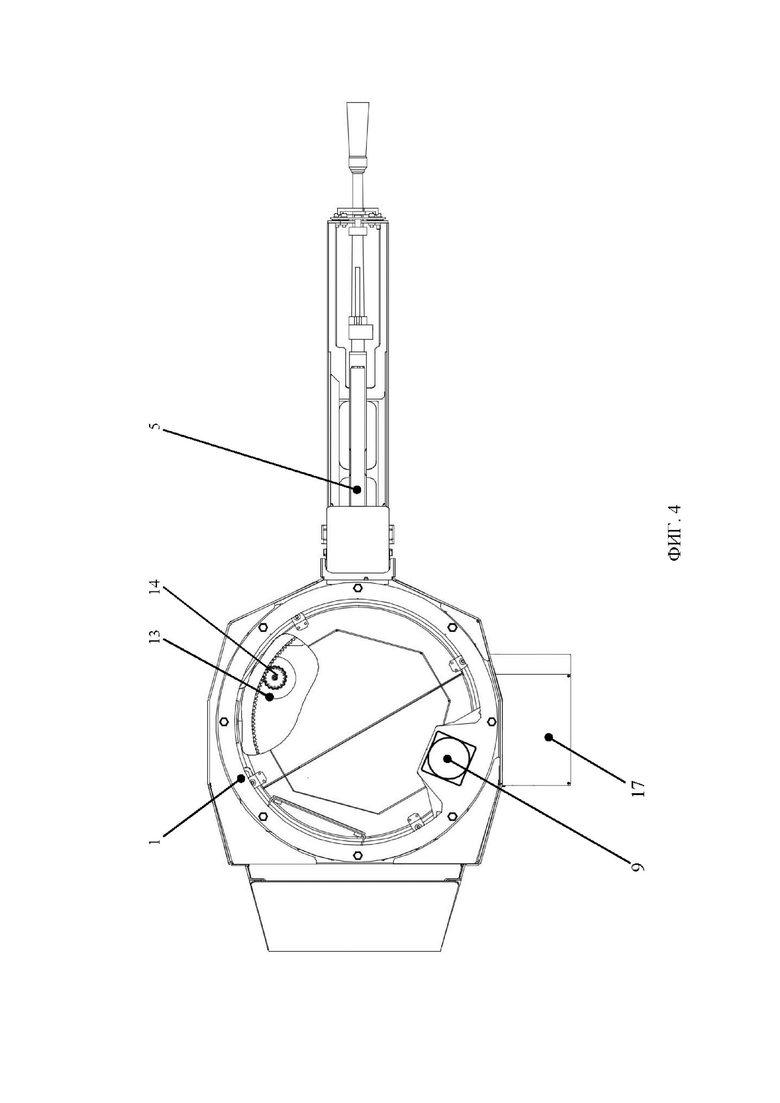
На фиг. 4 представлен вид снизу боевого модуля со стабилизацией линии прицеливания вооружения.
Конструктивно боевой модуль со стабилизацией линии прицеливания вооружения на фиг. 1-4 содержит:
1 - неподвижное основание;
2 - шасси боевой машины;
3 - поворотную платформу;
4 - опорно-поворотное устройство;
5 - качающуюся часть с вооружением;
6 - зубчатый сектор качающейся части;
7 - станок для установки и крепления качающейся части;
8 - защитный корпус;
9 - гиротахометр горизонтального наведения;
10 - блок управления гиротахометра горизонтального наведения;
11 - гиротахометр вертикального наведения;
12 - блок управления гиротахометра вертикального наведения;
13 - привод горизонтального наведения вооружения;
14 - шестерня привода горизонтального наведения вооружения;
15 - привод вертикального наведения вооружения;
16 - шестерня привода вертикального наведения вооружения;
17 - модуль оптико-электронный.
Неподвижное основание 1 жестко закреплено на корпусе шасси боевой машины 2, например, с помощью болтов.
Неподвижное основание 1 соединено с поворотной платформой 3 через опорно-поворотное устройство 4.
Поворотная платформа 3 представляет собой металлоконструкцию с посадочными местами под станок 7 для установки и крепления качающейся части с вооружением 5, и с посадочными местами под приводы горизонтального и вертикального наведения вооружения 12, 14.
Опорно-поворотное устройство 4 представляет собой радиально-опорный подшипник с зубчатым венцом.
Качающаяся часть с вооружением 5 представляет собой металлоконструкцию, на которой через посадочные места установлен зубчатый сектор качающейся части 6. На оси качания качающейся части с вооружением 5 закреплены цапфы, вращающиеся в обоймах (условно не показаны), которые, например, с помощью клиньев и болтов закреплены на станке 7.
Качающаяся часть с вооружением 5 установлена на станке 7 на поворотной платформе 4 и закрыта защитным корпусом 8.
Также боевой модуль содержит стабилизатор с зависимой линией прицеливания вооружения, который включает: гиротахометр горизонтального наведения 9, блок управления гиротахометра горизонтального наведения 10, гиротахометр вертикального наведения 11, блок управления гиротахометра вертикального наведения 12, привод горизонтального наведения вооружения 13 с шестерней привода горизонтального наведения вооружения 14, привод вертикального наведения вооружения 15 с шестерней привода вертикального наведения вооружения 16 и модуль оптико-электронный 17.
Гиротахометр горизонтального наведения 9 электрически связан, например, при помощи проводного соединения, с блоком управления гиротахометра горизонтального наведения 10 и модулем оптико-электронным 17.
Гиротахометр вертикального наведения 11 электрически связан, например, при помощи проводного соединения, с блоком управления гиротахометра вертикального наведения 12 и модулем оптико-электронным 17.
В качестве гиротахометра горизонтального наведения 9 и гиротахометра вертикального наведения 11 используются, например, гироскопические датчики угловой скорости, представляющие собой волоконно-оптические гироскопы, измеряющие абсолютную относительно инерциального пространства угловую скорость. При этом в гиротахометре горизонтального наведения 9 ось катушки оптоволокна выполнена ориентированной вертикально относительно горизонтальной плоскости части неподвижного основания 1, а в гиротахометре вертикального наведения 11 ось катушки оптоволокна выполнена ориентированной горизонтально относительно поверхности неподвижного основания 1.
При этом гиротахометр горизонтального наведения 9 установлен и закреплен на неподвижном основании 1, а гиротахометр вертикального наведения 11 установлен и жестко закреплен на поворотной платформе 3.
Блок управления гиротахометра горизонтального наведения 10 электрически связан, например, при помощи проводного соединения, с приводом горизонтального наведения вооружения 13 и модулем оптико-электронным 17.
Блок управления гиротахометра вертикального наведения 12 электрически связан, например, при помощи проводного соединения, с приводом вертикального наведения вооружения 15 и модулем оптико-электронным 17.
Блоки управления гиротахометрами горизонтального 10 и вертикального наведения 12, содержат платы с электронными компонентами и предназначены для преобразования сигналов, поступающих от гиротахометров горизонтального и вертикального наведения 9, 11, модуля оптико-электронного 17, их коммутацию и передачу на исполнительные приводы горизонтального и вертикального наведения вооружения 13, 15, снабженных соответственно шестернями 14 и 16.
Шестерня привода горизонтального наведения вооружения 14 установлена с возможностью постоянного взаимодействия, путем зацепления с зубчатым венцом опорно-поворотного устройства 4.
Шестерня привода вертикального наведения вооружения 16 установлена с возможностью постоянного взаимодействия, путем зацепления с зубчатым сектором качающейся части 6.
Модуль оптико-электронный 17 используется в качестве задающего устройства стабилизатора линии прицеливания А боевого модуля с артиллерийским или пулеметным вооружением. Модуль оптико-электронный 17 предназначен для обеспечения поиска, обнаружения и распознавания, при наблюдении оператором стрельбы на экране монитора управления (условно не показан), целей для обеспечения прицельной стрельбы из штатного вооружения, формирования линии прицеливания А путем наложения на видеоизображение целей прицельной марки, формирования после этого информационных и управляющих сигналов в блоки управления гиротахометрами 10, 12 для обеспечения совместной работы с приводами наведения вооружения 13, 15.
Модуль оптико-электронный 17, в котором формируется линия прицеливания А, жестко закреплен на оси цапф качающейся части с вооружением 5. Линия прицеливания А параллельна осевой линии ствола вооружения, перемещается совместно с поворотной платформой 3 боевого модуля в горизонтальной плоскости и вместе с качающейся частью с вооружением 5 в вертикальной плоскости. Модуль оптико-электронный 17 электрически связан с помощью проводного соединения с гиротахометрами 9, 11, блоками управления гиротахометрами 10, 12, приводами наведения 13, 15, с монитором управления (условно не показан) оператора стрельбы.
Модуль оптико-электронный 17 для формирования линии прицеливания на качающейся части вооружения 5 может быть выполнен, например, с блоком объектива видеокамеры и дальномером, формирует линию прицеливания вооружения. При этом на экране монитора оператора стрельбы формируется видеоизображение фоно-целевой обстановки в любое время суток, формируется наложение на видеоизображение прицельных знаков для обеспечения наведения вооружения на цель.
Предлагаемый боевой модуль со стабилизацией линии прицеливания А работает следующим образом.
При движении шасси боевой машины 2 с установленным боевым модулем, оснащенным стабилизатором линии прицеливания вооружения, возникают колебания частей его корпуса и качающейся части с вооружением 5. Эти колебания частей корпуса и качающейся части с вооружением 5 передаются на гиротахометр горизонтального наведения 9 и на гиротахометр вертикального наведения 11 стабилизатора линии прицеливания вооружения боевого модуля и измеряются ими.
Гиротахометр горизонтального наведения 9, размещенный на неподвижном основании 1, жестко связанном с шасси боевой машины 2, отслеживает низкочастотные колебания неподвижного основания 1 относительно горизонтальной плоскости при передвижении шасси боевой машины 2 и выдает сигнал об угловых скоростях только в горизонтальной плоскости, для чего ось катушки с оптоволокном в нем ориентирована вертикально.
Гиротахометр вертикального наведения 11, размещенный на поворотной платформе 3, отслеживает колебания неподвижного основания 1, поворотной платформы 3, относительно вертикальной плоскости при передвижении шасси боевой машины 2, с учетом влияния частот колебаний опорно-поворотного устройства 4.
Гиротахометр вертикального наведения 11 выдает сигнал об угловых скоростях только в вертикальной плоскости, для чего ось катушки с оптоволокном в нем ориентирована горизонтально. Измеренное механическое отклонение с помощью блоков управления гиротахометрами горизонтального и вертикального наведения 10, 12 преобразуется в электрический сигнал, который подается на вход исполнительных приводов горизонтального и вертикального наведения вооружения 13, 15.
В процессе боевого применения для стабилизации линии прицеливания вооружения при стрельбе с ходу по движущимся целям приводы горизонтального и вертикального наведения вооружения 13, 15 развивают вращающий момент, под действием которого поворотная платформа 3 и качающаяся часть с вооружением 5 поворачиваются в противоположную сторону от возмущающего воздействия.
Каждый из этих двух блоков управления гиротахометрами 10, 12 с приводами наведения вооружения 13, 15 и модулем оптико-электронным 17 представляет собой систему автоматического регулирования, работа которой основана на принципе отработки рассогласования (ошибки), т.е. на сравнении действительного значения угла горизонтального и вертикального наведения с его заданным значением. Это позволяет при боевом применении боевого модуля со стабилизацией линии прицеливания вооружения исключить влияние высокочастотных и резонансных частот перемещения ствола и казенной части с частями механизма затвора артиллерийского вооружения относительно обойм цапф, опоры ствола артиллерийского вооружения, частей рукавов системы подачи боекомплекта, закрепленных на качающейся части с вооружением 5, на показания гиротахометра вертикального наведения 11, что позволяет повысить точность стабилизации при стрельбе с ходу шасси боевой машины 2 по движущимся целям и способствует повышению меткости боя пулемета боевого модуля.
При этом поворотная платформа 3 приводится во вращение приводом горизонтального наведения 13, за счет взаимодействия шестерни привода горизонтального наведения вооружения 14 с зубчатым венцом опорно-поворотного устройства 4, а качающаяся часть с вооружением 5 приводиться во вращение приводом вертикального наведения вооружения 15, за счет взаимодействия шестерни привода вертикального наведения вооружения 16 с зубчатым сектором качающейся части 6. Соответственно, гиротахометр вертикального наведения 11 перемещается относительно гиротахометра горизонтального наведения 9 при перемещении поворотной платформы 3 на опорно-поворотном устройстве 4. При этом гиротахометр горизонтального наведения 9 и гиротахометр вертикального наведения 11 измеряют механическое перемещение и отклонение, а с помощью блоков управления гиротахометрами горизонтального и вертикального наведения 10, 12 вырабатывается электрический сигнал для приводов горизонтального и вертикального наведения вооружения 13, 15.
Для того, чтобы попасть в цель, стволу вооружения придают такое положение, при котором траектория снаряда прошла бы через цель. Этого достигают за счет модуля оптико-электронного 17, который жестко связан с качающейся частью с вооружением 5, но находится не на самом стволе вооружения, а рядом, с левой стороны. Модуль оптико-электронный 17 движется вместе с качающейся частью с вооружением 5 и поворачивается в горизонтальной плоскости вместе с поворотной платформой 3 боевого модуля. В модуле оптико-электронном 17 формируется линия прицеливания вооружения А, по отношению к которой формируется заданный угол вертикального и горизонтального наведения вооружения.
Стабилизацию линии прицеливания вооружения А для наведения вооружения осуществляют также по сигналу с гиротахометров 9 и 11. При обнаружении цели с помощью модуля оптико-электронного 17, наводчик на мониторе панели управления наводит прицельную марку на видеоизображение цели. В зависимости от условий и дальности до цели в модуле оптико-электронном 17 формируется линия прицеливания вооружения А на цель, задается угол наведения вооружения.
При движении шасси боевой машины 2 по пересеченной местности прицельная марка линия прицеливания А отклоняется от цели, что отслеживается гиротахометрами 9, 11, которые выдают сигналы в модуль оптико-электронный 17 и в блоки управления 10, 12. По сформированным сигналам из блоков управления 10, 12 приводы наведения вооружения 13, 15 разворачивают поворотную платформу 3 и качающуюся часть с вооружением 5 в положение, когда прицельные марки линии прицеливания вооружения А в модуле оптико-электронном 17 удерживаются на цели, что позволяет осуществлять прицельный выстрел из вооружения.
Угол между заданным и действительным углом наведения ствола вооружения в вертикальной и горизонтальной плоскости, в этом случае определяет ошибку стабилизации. Сигнал с гиротахометров 9 и 11, пропорциональный ошибке стабилизации вооружения от линии прицеливания вооружения А, поступает в блоки управления 10, 12, и отрабатывается приводами наведения вооружения 13, 15, поворачивающими ствол вооружения в сторону уменьшения ошибки для повышении точности стабилизации по вертикали и горизонтали.
Размещение гиротахометра горизонтального наведения 9 на неподвижном основании 1, жестко связанном с шасси боевой машины 2, а гиротахометра вертикального наведения 11 на поворотной платформе 3, позволило снизить при боевом применении влияние высокочастотных и резонансных частот перемещения частей металлоконструкции боевого модуля относительно мест их крепления качающейся части вооружения (таких как: ствола артиллерийского вооружения, опора ствола артиллерийского вооружения, казенной части вооружения, рукавов системы подачи боекомплекта, закрепленной на артиллерийском вооружении), на показания гиротахометра вертикального наведения и повысить стабилизацию вооружения при стрельбе с ходу по движущимся целям и меткости боя вооружения боевого модуля, например, пулемета.
Ниже представлен пример конкретного осуществления предлагаемого изобретения.
Пример 1.
Предлагаемая конструкция боевого модуля со стабилизацией линии прицеливания вооружения реализована в изделии ДПВ-РБП.00.00.00.00-04, представляющее собой боевой модуль, предназначенный для размещения на шасси сухопутного или морского базирования. Данные о меткости боя пулемета боевого модуля с классической компоновкой боевого модуля и предлагаемого боевого модуля определяли в ходе полевых испытаний, результаты которых представлены в таблице 1.
ДПВ-РБП.00.00.00.00-04 по прототипу
ДПВ-РБП.00.00.00.00-04
В результате испытаний установлено, что использование предлагаемой конструкции боевого модуля со стабилизацией линии прицеливания вооружения позволило минимизировать влияние резонансных частот частей боевого модуля, влияющих на работу стабилизатора вооружения, а также повысить точность стабилизации линии прицеливания при стрельбе с ходу по движущимся целям обеспечив повышение меткости боя пулемета на 32%.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2016 |
|
RU2629688C1 |
| Боевой модуль с магнитожидкостным компенсатором отдачи | 2023 |
|
RU2825790C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2828680C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2024 |
|
RU2839637C1 |
| АВТОМАТИЗИРОВАННАЯ ФОРТИФИКАЦИОННАЯ РАКЕТНАЯ УСТАНОВКА | 2014 |
|
RU2591561C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| Боевой модуль робототехнического комплекса с универсальным ложементом | 2024 |
|
RU2838709C1 |
| Боевой модуль с дистанционным управлением | 2018 |
|
RU2686896C1 |
| ОДНОМЕСТНЫЙ БОЕВОЙ МОДУЛЬ | 2014 |
|
RU2569068C1 |


Изобретение относится к военной технике и касается боевого модуля, который может быть использован на унифицированных колесных или гусеничных тяжелых и средних платформах бронетанковой техники. Боевой модуль со стабилизацией линии прицеливания вооружения содержит неподвижное основание, жестко закрепленное на шасси боевой машины, поворотную платформу, опорно-поворотное устройство, качающуюся часть с вооружением и с зубчатым сектором качающейся части, станок для установки и крепления качающейся части, защитный корпус. Также устройство содержит стабилизатор с зависимой линией прицеливания вооружения, включающий гиротахометр горизонтального наведения, блок управления гиротахометра горизонтального наведения, гиротахометр вертикального наведения, блок управления гиротахометра вертикального наведения, привод горизонтального наведения вооружения с шестерней, привод вертикального наведения вооружения с шестерней и модуль оптико-электронный. Технический результат – повышение меткости боя вооружения боевого модуля при стрельбе с ходу по движущимся целям. 3 з.п. ф-лы, 4 ил., 1 табл.
1. Боевой модуль со стабилизацией линии прицеливания вооружения содержит неподвижное основание, жестко закрепленное на шасси боевой машины, поворотную платформу, опорно-поворотное устройство, качающуюся часть с вооружением и с зубчатым сектором качающейся части, станок для установки и крепления качающейся части, защитный корпус, стабилизатор с зависимой линией прицеливания вооружения, включающий гиротахометр горизонтального наведения, блок управления гиротахометра горизонтального наведения, гиротахометр вертикального наведения, блок управления гиротахометра вертикального наведения, привод горизонтального наведения вооружения с шестерней привода горизонтального наведения вооружения, привод вертикального наведения вооружения с шестерней привода вертикального наведения вооружения и модуль оптико-электронный, при этом неподвижное основание соединено с поворотной платформой через опорно-поворотное устройство, представляющее собой радиально-опорный подшипник с зубчатым венцом, поворотная платформа выполнена в виде металлоконструкции с посадочными местами под станок для установки и крепления качающейся части с вооружением и с посадочными местами под приводы горизонтального и вертикального наведения вооружения, качающаяся часть с вооружением выполнена в виде металлоконструкции, на которой через посадочные места установлен зубчатый сектор качающейся части, а на оси качания закреплены цапфы с обоймами, при этом качающаяся часть с вооружением установлена и закреплена на станке для установки и крепления качающейся части с вооружением и закрыта защитным корпусом, гиротахометр горизонтального наведения электрически связан с блоком управления гиротахометра горизонтального наведения и модулем оптико-электронным, гиротахометр вертикального наведения электрически связан с блоком управления гиротахометра вертикального наведения и модулем оптико-электронным, блок управления гиротахометра горизонтального наведения электрически связан с приводом горизонтального наведения вооружения и с модулем оптико-электронным, блок управления гиротахометра вертикального наведения электрически связан с приводом вертикального наведения вооружения и модулем оптико-электронным, шестерня привода горизонтального наведения вооружения установлена с возможностью постоянного взаимодействия путем зацепления с зубчатым венцом опорно-поворотного устройства, шестерня привода вертикального наведения вооружения установлена с возможностью постоянного взаимодействия путем зацепления с зубчатым сектором качающейся части с вооружением, модуль оптико-электронный, в котором формируется линия прицеливания, жестко закреплен на оси цапф качающейся части с вооружением и электрически связан с гиротахометрами горизонтального и вертикального наведения, с блоками управления гиротахометрами горизонтального и вертикального наведения, с приводами горизонтального и вертикального наведения вооружения, причем гиротахометр горизонтального наведения установлен и закреплен на неподвижном основании, а гиротахометр вертикального наведения установлен и жестко закреплен на поворотной платформе.
2. Боевой модуль по п. 1, отличающийся тем, что в качестве гиротахометра горизонтального наведения и гиротахометра вертикального наведения используются гироскопические датчики угловой скорости, представляющие собой волоконно-оптические гироскопы, измеряющие абсолютную относительно инерциального пространства угловую скорость, при этом в гиротахометре горизонтального наведения ось катушки оптоволокна выполнена ориентированной вертикально относительно горизонтальной плоскости части неподвижного основания, а в гиротахометре вертикального наведения ось катушки оптоволокна выполнена ориентированной горизонтально относительно поверхности неподвижного основания.
3. Боевой модуль по п.1, отличающийся тем, что неподвижное основание боевого модуля жестко закреплено с помощью болтов на усиленной части несущего корпуса шасси боевой машины.
4. Боевой модуль по п.1, отличающийся тем, что модуль оптико-электронный для формирования линии прицеливания на качающейся части вооружения выполнен с блоком объектива видеокамеры и дальномером, при этом на экране монитора оператора стрельбы формируется видеоизображение фоно-целевой обстановки в любое время суток, формируется наложение на видеоизображение прицельных знаков для обеспечения наведения вооружения на цель.
| RU 211989 U1, 30.06.2022 | |||
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2016 |
|
RU2629688C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| СПОСОБ ЭЛЕКТРОЛИТИЧЕСКОГО ПОЛИРОВАНИЯ ВИСМУТА | 0 |
|
SU180932A1 |
| БОЕВОЕ ОТДЕЛЕНИЕ БРОНИРОВАННОЙ МАШИНЫ | 2003 |
|
RU2258889C2 |
| EP 3306259 A1, 11.04.2018. | |||

