Изобретение относится к области военной техники, а именно к автоматизированному вооружению с дистанционным управлением, которое устанавливается на робототехнические комплексы, и может быть использовано для огневого поражения различных целей.
Из уровня техники известен ряд технических решений, направленных на обеспечение процесса дистанционного наведения и стрельбы из стрелкового оружия.
Например:
Стрелковое оружие с дистанционным управлением (Патент РФ №2460027, опубл. 27.08.2012 г.), содержащее устройство с тягой изменяемой длины, соединенной со штоком электромагнитного реле автомобильного стартера и рычагом, который упирается в спусковой крючок стрелкового оружия.
Устройство автоматического управления спаренным пулеметом (Патент РФ №2642222, опубл. 24.01.2018 г.), содержащее станок с подвижной и неподвижными частями, установку с оружием, размещенную на подвижной части, закрепленный на неподвижной части привод горизонтального наведения, механизм вертикального наведения, кинематически связывающий привода с установкой. Установка разделена на первую и вторую части, соединенные соответственно через первую и вторую части механизма вертикального наведения с первым и вторым приводами этого механизма, каждая часть которого выполнена в виде двух червяков со скрещивающимися взаимно перпендикулярными осями и червячного колеса, жестко закрепленного на оси одного червяка, размещенного на подвижной части и взаимодействующего с зубчатым колесом, жестко связанным с разделенной частью установки, и сопряженного с другим червяком, ось которого совмещена с вертикальной осью поворота подвижной части, при этом стволы соответственно размещены на первой и второй частях установки.
Боевой модуль АУ-220М с артиллерийской установкой для размещения на военной технике (Патент РФ №55117, опубл. 27.07.2006 г.), содержащий боевой модуль с артиллерийской установкой для размещения на подвижных боевых средствах, состоящий из бронированной башни с артиллерийским орудием, боеукладки, системы заряжания и прицельно-наблюдательного комплекса, 57-мм автоматической пушки, системы управления огнем, стабилизатора вооружения.
Дистанционно-управляемый боевой модуль (Патент РФ №2715254, опубл. 26.02.2020 г.), содержащий механический модуль и размещенные в нем: пулемет крупного калибра, система питания, состоящая из расположенного внутри механического модуля съемного магазина с лентой, снаряженной патронами, и тракта питания пулемета.
Способ ведения боевых действий, система дистанционного управления стрельбой и дистанционно-управляемое стрелковое оружие (Заявка на изобретение №2004110354/02, опубл. 20.10.2005 г.). Система дистанционного управления стрелковым оружием, содержащая по меньшей мере, одну единицу стрелкового оружия, установленную стационарно и содержащую видеокамеру, привода вертикального и горизонтального перемещения, привод спускового механизма и приемнопередающее устройство, соединенные каналом связи через управляющее приемнопередающее устройство с компьютером, имеющим монитор и устройство управления, например «джойстик». Стационарное стрелковое оружие оборудовано оптическим прицелом с лазерным целеуказателем.
Дистанционно-управляемое стрелковое оружие, содержащее ствол и механизмы горизонтального и вертикального перемещения, видеокамеру, блок управления, подключенный к приемнопередающему устройству, привода вертикального и горизонтального перемещения и привод спускового механизма, подключенные к блоку управления. Механизм вертикально перемещения ствола выполнен в виде вертикального сектора, взаимодействующего с приводом вертикального перемещения, а механизм горизонтального перемещения выполнен в виде поворотной планки, взаимодействующей с приводом горизонтального перемещения, спусковой механизм выполнен в виде соленоида или кулачкового механизма с электроприводом, при этом все привода соединены электрической связью с блоком управления.
Боевой модуль робототехнического комплекса с дистанционным наведением и ведением огня (Патент РФ №2813397, МПК F41H 7/00 от 12.02.2024 г.), содержащий: легкобронированную машину с установленным на ней двигателем, трансмиссией, ходовой частью с движителем, вооружением и аппаратурой управления, рама автоматического гранатомета АГС-17 жестко закреплена в верхней части робототехнического комплекса, а в торцевой части автоматического гранатомета АГС-17 расположен шаговый двигатель, выходным звеном которого является червячный вал, который в свою очередь через червячное колесо и шестерню соединен с шестерней вертикального наведения, также в торцевой части автоматического гранатомета АГС-17 смонтирован блок электроспуска, включающий корпус с электромагнитом, якорь и двуплечий рычаг, при этом шаговый двигатель и блок электроспуска соединены и дистанционно управляются электронным блоком управления.
Из уровня техники также известен боевой роботизированный модуль, принятый за прототип (Патент РФ №2531630, МПК F41H 7/02 от 16.04.2016 г.), содержащий: самоходное транспортное средство, устройства для крепления оборудования, приводные механизмы, пост дистанционного управления, бортовые источники питания, систему дистанционной связи, бортовую телевизионную систему, функциональное оборудование в виде поворотной платформы для установки системы вооружения, содержащей модули, предназначенные для размещения системы вооружения и выполнения задач по назначению: люльку, блок наблюдения и целеуказания, ящик для боекомплекта, лоток, устройство ввода, привод горизонтальный и вертикальный, блок электронный.
Общим недостатком представленных выше боевых модулей, в том числе и прототипа является их недостаточная эффективность, обусловленная тем, что конструкционно ложемент боевого модуля предусматривает монтаж только одного (штатного) образца оружия. То есть отсутствует возможность оперативно разместить в боевом модуле другой тип оружия, требуемый для эффективного решения боевой задачи, что делает его малоэффективным при ведении боя с различными огневыми средствами противника.
Так, использование управляемых ракет весьма эффективно при борьбе как с мобильными, так и стационарными объектами противника, в том числе и бронированными (танки, БМП, вертолеты и пр.). Вместе с тем управляемая ракета малоэффективна при борьбе с пехотой противника. В таких случаях рационально применять оружие способное за короткий промежуток времени прицельно выпустить большое количество поражающих элементов. Для этой цели больше подходит автоматическое оружие типа пулемет или автомат. Данные обстоятельства позволяют утверждать о необходимости унификации боевого модуля робототехнического комплекса c различными типами оружия.
Техническим результатом заявленного изобретения является повышение эффективности боевого модуля робототехнического комплекса за счет его унификации c различными типами оружия.
Технический результат достигается за счет того, что на поворотной платформе боевого модуля устанавливается и жестко, с возможностью вертикального перемещения, шарнирно закрепляется универсальный ложемент, состоящий из стального основания, в передней и задней части которого приварены четыре пары петель с проушинами для крепления оружейной люльки и гильзоотражателя. В центральной части основания выполнен пружинный амортизатор отката, состоящий из двух пар петель с проушинами приваренными к пластине, опирающейся на пару пружин сжатия жестко зафиксированных от продольного перемещения стопорной пластиной, выполненных с возможностью свободного перемещения вдоль основания в направлении отката оружия. Крепление оружейной люльки к универсальному ложементу осуществляется с помощью стопорных пальцев. Ответная сторона оружейных люлек выполнена однообразно, с целью фиксации на универсальном ложементе, а другая сторона выполняется индивидуально для используемого типа оружия.
Предложение поясняется чертежами, на которых изображены:
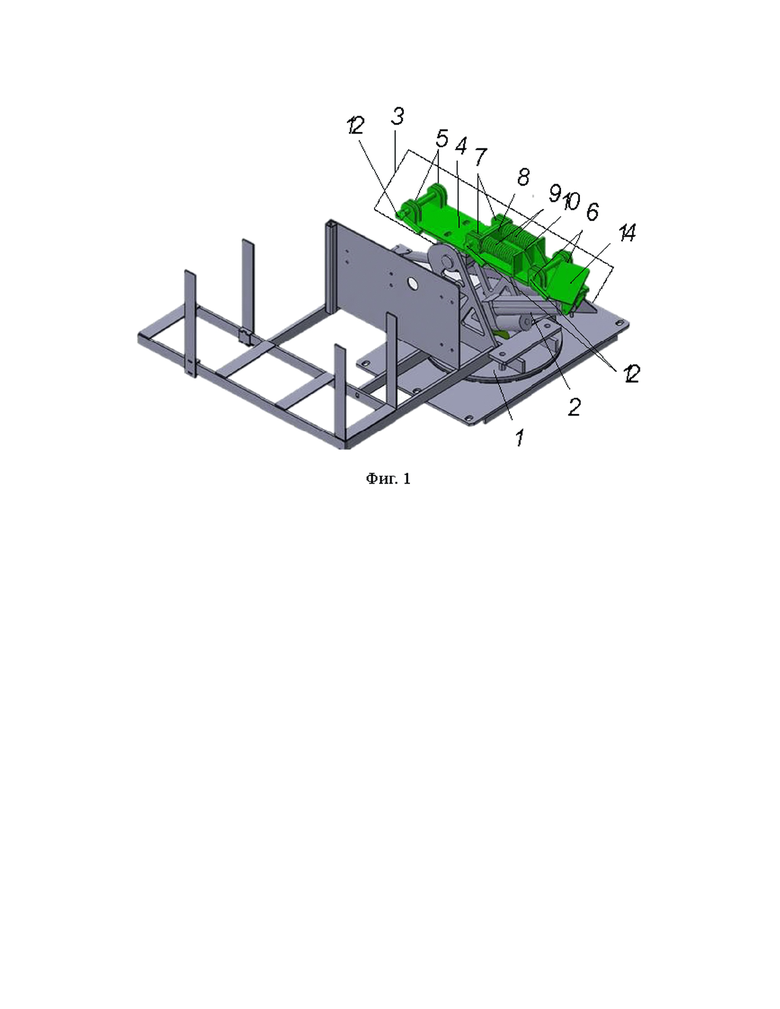
Фиг. 1 - общий вид боевого модуля робототехнического комплекса с универсальным ложементом;
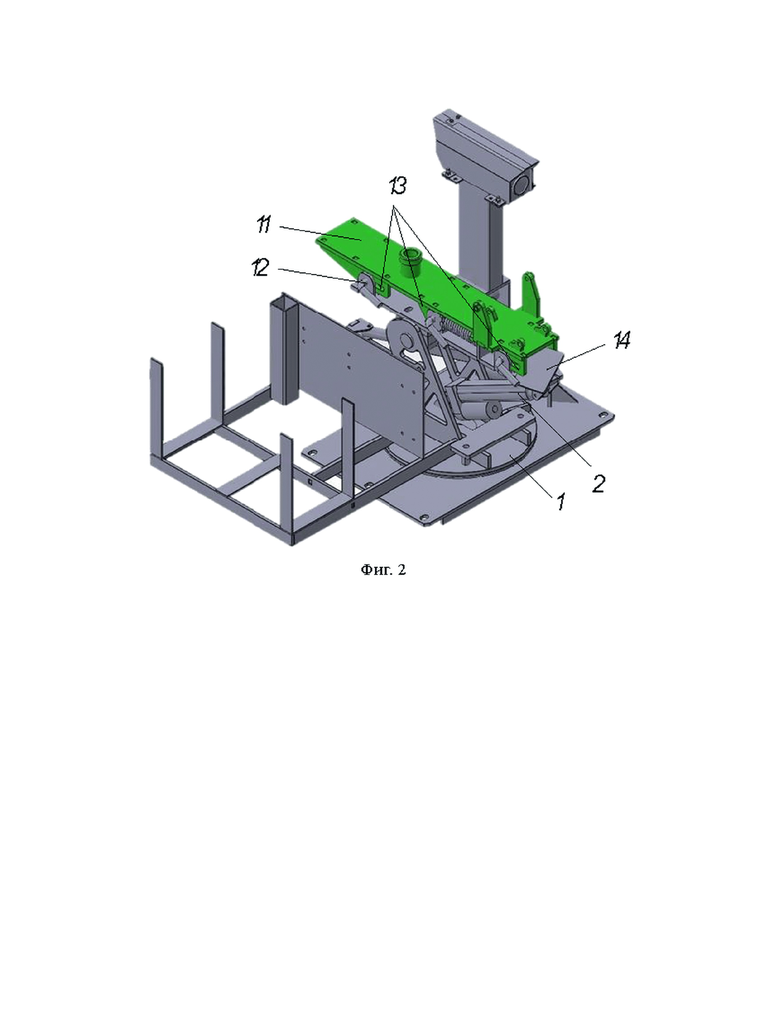
Фиг. 2 - общий вид боевого модуля робототехнического комплекса с установленной на универсальном ложементе оружейной люлькой для ПТРК типа Корнет, Фагот и Метис;
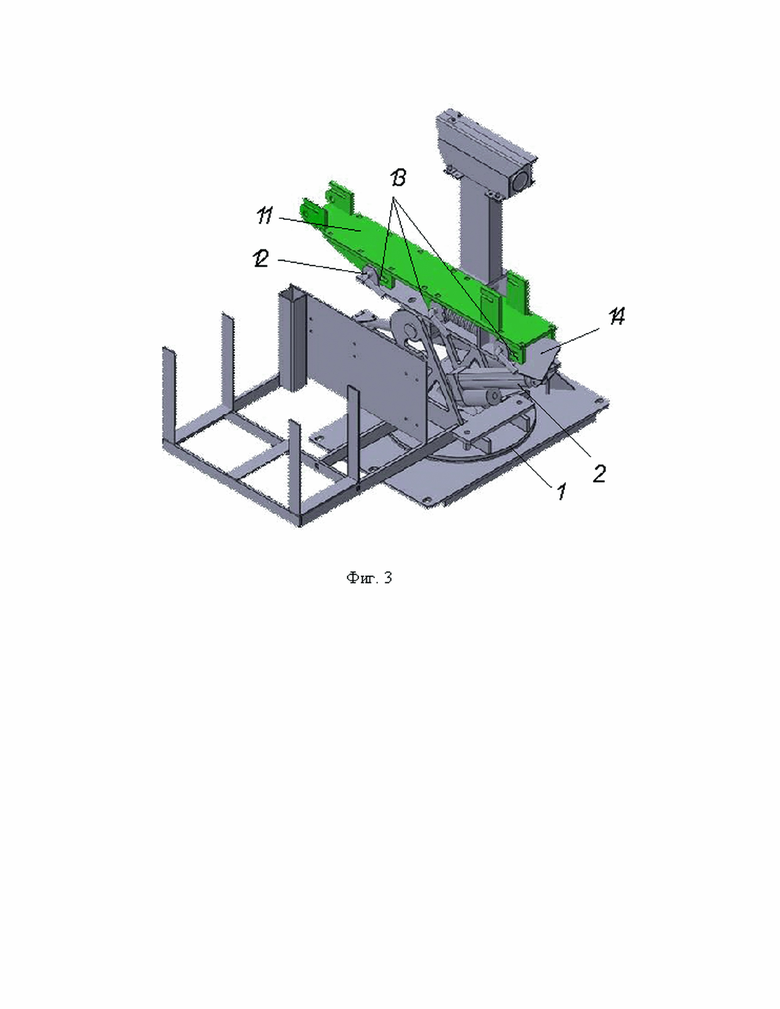
Фиг. 3 - общий вид боевого модуля робототехнического комплекса с установленной на универсальном ложементе оружейной люлькой для НСВТ;
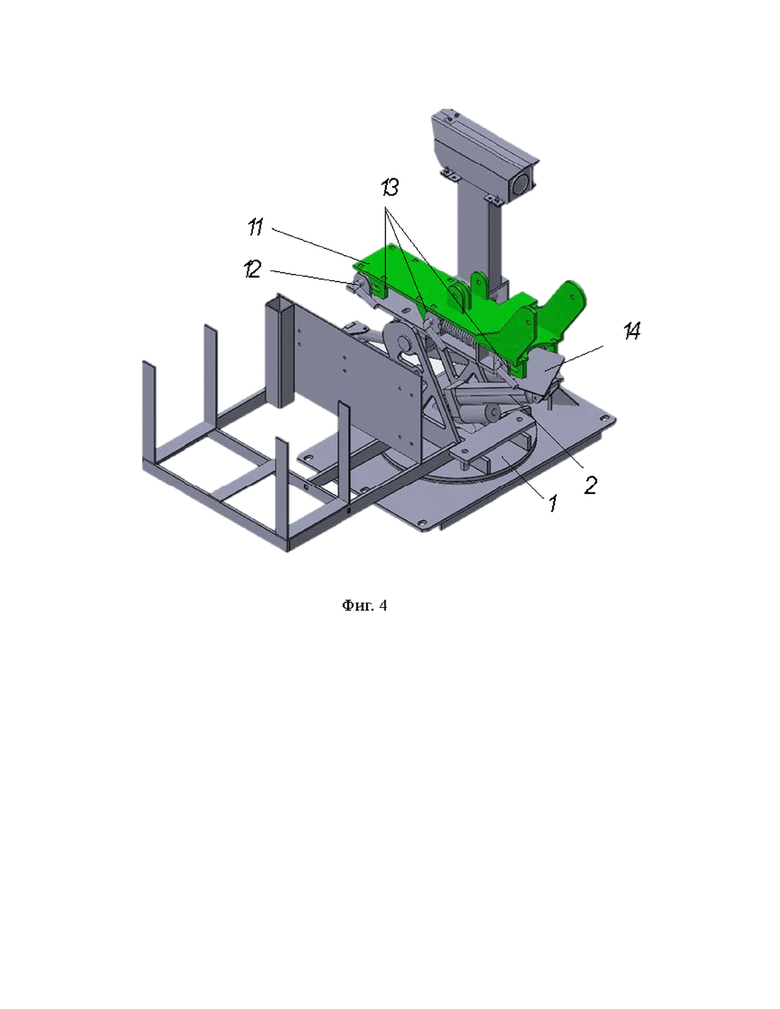
Фиг. 4 - общий вид боевого модуля робототехнического комплекса с установленной на универсальном ложементе оружейной люлькой для АГС-17;
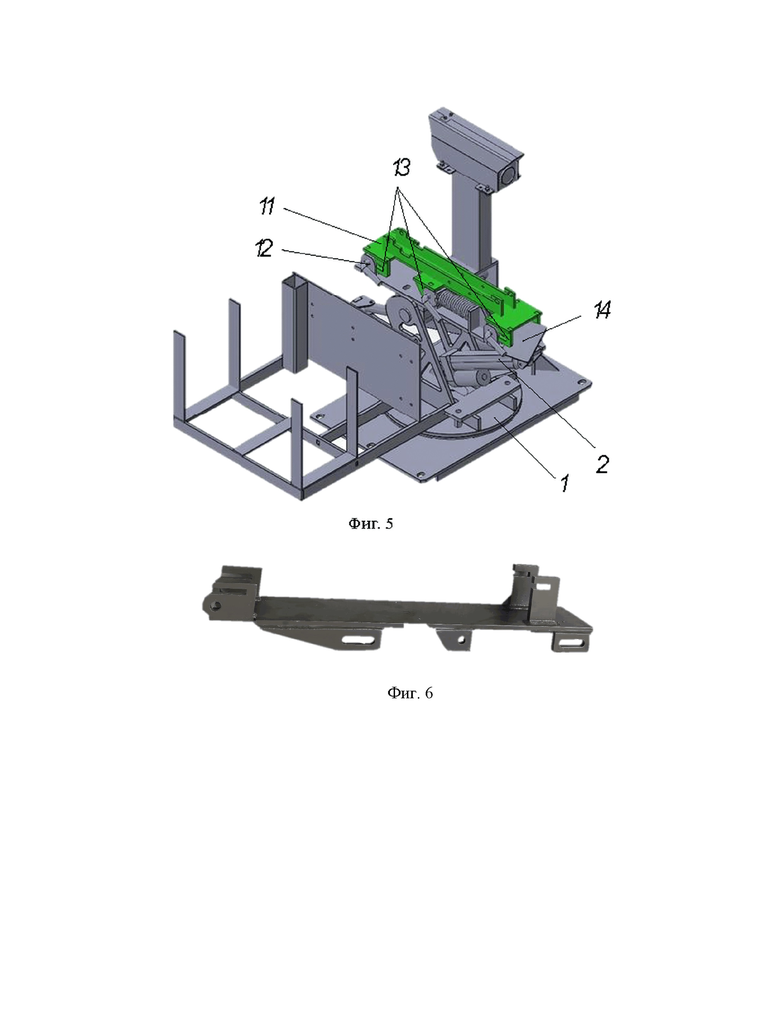
Фиг. 5 - общий вид боевого модуля робототехнического комплекса с установленной на универсальном ложементе оружейной люлькой для ПКТ;
Фиг. 6 - опытный образец оружейной люльки для НСВТ;
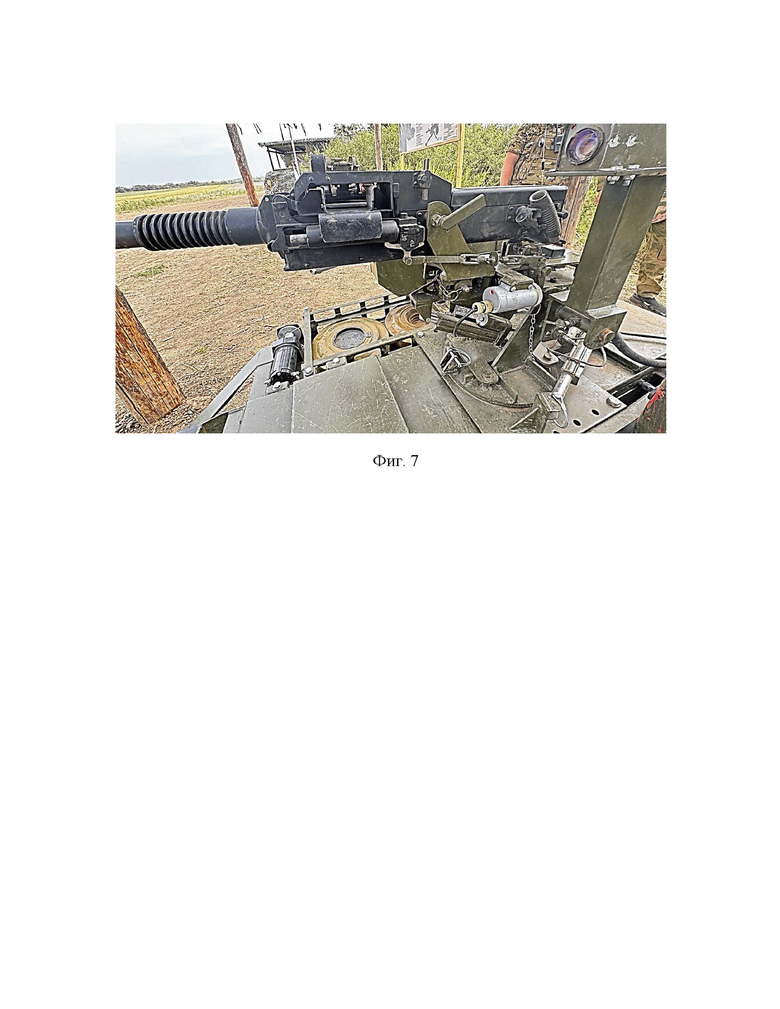
Фиг. 7 - пример боевого использования универсального ложемента с установленным на нем АГС-17.
Заявленный боевой модуль робототехнического комплекса, состоит из поворотной платформы 1 (см. фиг. 1) для установки системы вооружения, и содержит модули, предназначенные для размещения системы вооружения и выполнения задач по назначению: блок наблюдения и целеуказания (на чертеже не показан), устройство ввода (на чертеже не показано), привод горизонтальный (на чертеже не показан) и вертикальный 2, универсальный ложемент 3, состоящий из стального основания 4, в передней и задней части которого сварным соединением жестко зафиксированы пары петель 5 и 6 с проушинами для крепления оружейных люлек 11 (см. фиг. 2-5). В центральной части основания выполнен пружинный амортизатор отката, состоящий из двух пар петель 7 с проушинами приваренными к пластине 8, опирающейся на пару пружин сжатия 9 жестко зафиксированных от продольного перемещения стопорной пластиной 10 сваркой зафиксированной на стальном основании 4. Петли 7 с пластиной 8 выполнены с возможностью свободного перемещения вдоль основания в направлении отката оружия и обратно. Крепление оружейных люлек 11 к универсальному ложементу осуществляется с помощью стопорных пальцев 12 фиксирующих между парами петель 5, 6 и 7 петли 13 с проушинами, расположенные на ответной стороне оружейной люльки 11 (см. фиг. 2-5). Проушины петель 13 расположенные в передней и задней части люльки имеют продолговатую форму для обеспечения возможности прямолинейного перемещения оружейной люльки 11 относительно универсального ложемента 3 при воздействии отдачи (см. фиг. 6).
Проушины петель 13 расположенные в центре оружейной люльки 11 имеют круглую форму и соответствуют диаметру проушин пар петель 7 пружинного амортизатора отката и стопорных пальцев 12 для неподвижной их фиксации (см. фиг. 6).
Внешняя сторона оружейных люлек 11 выполняется с индивидуальным креплением для фиксации используемого типа оружия (см. фиг. 2-5). С целью предотвращения заклинивания затвора оружия стреляной гильзой при ее рикошете об элементы поворотной платформы 1, в задней части универсального ложемента 3 под углом 45 град. устанавливают и фиксируют сварным соединением гильзоотражатель 14, позволяющий задать безопасное направление рикошету гильз.
Заявленный боевой модуль робототехнического комплекса функционирует следующим образом. Перед выполнением задачи оператор подготавливает робототехнический комплекс к работе. Для этого, в зависимости от решаемой робототехническим комплексом задачи, закрепляет на универсальном ложементе 3 оружейную люльку 11 для того типа оружия который востребован в данной боевой обстановке. Крепление оружейных люлек 11 к универсальному ложементу 3 осуществляется следующим образом. Петли 13 расположенные на оружейной люльке 11 заводятся между парами петель 5, 6 и 7, расположенными на универсальном ложементе 3 и фиксируются с помощью стопорных пальцев 12 после совмещения проушин. Далее на люльку 11 устанавливается оружие в порядке, определенном инструкцией по эксплуатации.
Следует отметить, что при использовании различных динамореактивных типов гранатометов и ракетных комплексов при старте ракеты отсутствует отдача. Поэтому для ведения прицельного огня из динамореактивных типов оружия наличие устройств, нивелирующих отдачу, не требуются. Противоположный эффект используется в автоматическом стрелковом оружии, принцип которого основан на использовании энергии пороховых газов. Поскольку штатный темп стрельбы из автоматического оружия достаточно высок и составляет, например, для пулемета «Корд» не менее 600 выстрелов в минуту, то стрельба очередями из указанного типа оружия, установленного на боевой модуль, с неизбежностью сопровождается уводом оружия с линии прицеливания за счет отдачи и неабсолютной жесткости всех элементов, фиксирующих оружие в пространстве, включая несущие элементы модуля, а также корпус и шасси робототехнического комплекса. При этом чем выше темп стрельбы и длиннее очередь, тем значительнее проявлении данного эффекта. Указанная проблема может быть эффективно решена использованием в конструкции ложемента 3 пружинного амортизатора отката.
Так, при производстве выстрела из автоматического оружия энергия отдачи заставляет его корпус сместиться назад вместе с жестко зафиксированной с ним оружейной люлькой 11. Форма проушин петель 13 обуславливает возможность возвратно-поступательного перемещения люльки 11 в направлении отката и обратно относительно универсального ложемента 3 вследствие воздействия отдачи. Жестко зафиксированные между собой стопорными пальцами 12 центральные петли 13 оружейной люльки 11 и пары петель 7 универсального ложемента 3 передают энергию отдачи пружинному амортизатору отката, где она поглощается парой пружин сжатия 9.
Таким образом, предлагаемое техническое решение позволяет обеспечить повышение эффективности боевого модуля робототехнического комплекса за счет его унификации c различными типами оружия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Боевой модуль робототехнического комплекса военного назначения с устройством прерывания очереди при стрельбе из автоматического оружия | 2023 |
|
RU2831825C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС С НОЖНИЧНЫМ ПОДЪЕМНИКОМ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2830637C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| СПОСОБ РЕШЕНИЯ ОГНЕВОЙ ЗАДАЧИ ДИСТАНЦИОННО УПРАВЛЯЕМЫМ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ ВОЕННОГО НАЗНАЧЕНИЯ В АВТОНОМНОМ РЕЖИМЕ | 2024 |
|
RU2840168C1 |
| Способ и устройство для постановки минных заграждений | 2023 |
|
RU2834487C1 |
| УСТРОЙСТВО АВТОМАТИЗАЦИИ НАВЕДЕНИЯ ПУСКОВОЙ УСТАНОВКИ ПРОТИВОТАНКОВОГО РАКЕТНОГО КОМПЛЕКСА "ФАГОТ" | 2024 |
|
RU2834077C1 |
| Мобильный роботехнический комплекс | 2024 |
|
RU2828909C1 |
| СПОСОБ ПОСТАНОВКИ МИННЫХ ЗАГРАЖДЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2833085C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОЙ ЭВАКУАЦИИ НА БАЗЕ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2024 |
|
RU2838648C1 |
| Боевой модуль с магнитожидкостным компенсатором отдачи | 2023 |
|
RU2825790C1 |
Изобретение относится к автоматизированному вооружению с дистанционным управлением, которое устанавливается на робототехнические комплексы. На поворотной платформе робототехнического комплекса устанавливается и с возможностью вертикального перемещения закрепляется универсальный ложемент, состоящий из стального основания. В передней и задней частях ложемента приварены четыре пары петель с проушинами для крепления оружейной люльки и гильзоотражателя. В центральной части основания выполнен пружинный амортизатор отката, состоящий из двух пар петель с проушинами. Крепление оружейной люльки к универсальному ложементу осуществляется с помощью стопорных пальцев. Ответная сторона оружейных люлек выполнена однообразно с целью фиксации на универсальном ложементе. Другая сторона выполняется индивидуально для используемого типа оружия. Достигается повышение эффективности боевого модуля робототехнического комплекса за счет его унификации c различными типами оружия. 3 з.п. ф-лы, 7 ил.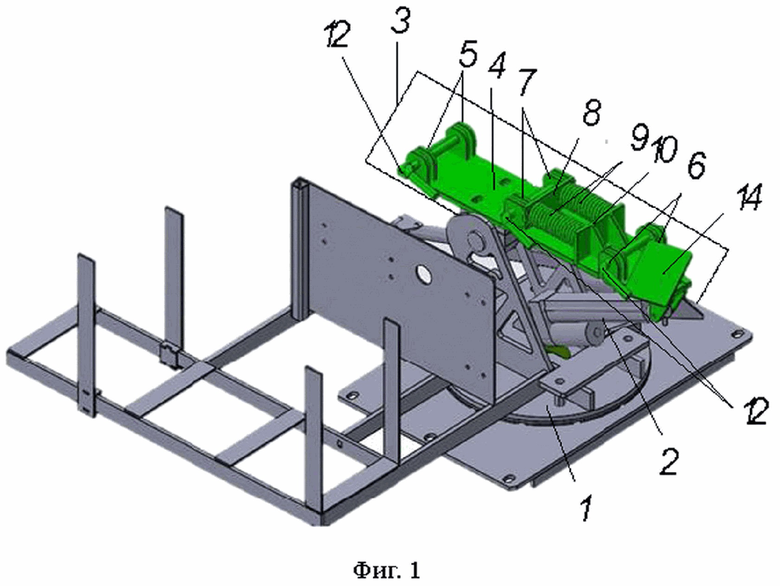
1. Боевой модуль робототехнического комплекса с универсальным ложементом, содержащий самоходное транспортное средство, устройства для крепления оборудования, приводные механизмы, пост дистанционного управления, бортовые источники питания, систему дистанционной связи, бортовую телевизионную систему, функциональное оборудование в виде поворотной платформы для установки системы вооружения, содержащей модули, предназначенные для размещения системы вооружения и выполнения задач по назначению: блок наблюдения и целеуказания, устройство ввода, привод горизонтальный и вертикальный, блок электронный, отличающийся тем, что на поворотной платформе устанавливается и жестко, с возможностью вертикального перемещения, шарнирно закрепляется универсальный ложемент, состоящий из стального основания, в передней и задней части которого приварены четыре пары петель с проушинами для крепления оружейной люльки и гильзоотражателя.
2. Боевой модуль по п. 1, отличающийся тем, что в центральной части основания выполнен пружинный амортизатор отката, состоящий из двух пар петель с проушинами, приваренными к пластине, опирающейся на пару пружин сжатия, жестко зафиксированных от продольного перемещения стопорной пластиной, выполненных с возможностью свободного перемещения вдоль основания в направлении отката оружия.
3. Боевой модуль по п. 1, отличающийся тем, что крепление оружейной люльки к универсальному ложементу осуществляется с помощью стопорных пальцев.
4. Боевой модуль по п. 1, отличающийся тем, что ответная сторона оружейных люлек выполнена однообразно с целью фиксации на универсальном ложементе, а другая сторона выполняется индивидуально для используемого типа оружия.
| Боевой модуль с магнитожидкостным компенсатором отдачи | 2023 |
|
RU2825790C1 |
| БОЕВОЙ МОДУЛЬ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА С ДИСТАНЦИОННЫМ НАВЕДЕНИЕМ И ВЕДЕНИЕМ ОГНЯ | 2023 |
|
RU2813397C1 |
| ПРИБОР ДЛЯ НАНЕСЕНИЯ ПЛАНА ПО ДАННЫМ ТАХИМЕТРИЧЕСКОЙ СЪЕМКИ | 1929 |
|
SU16426A1 |
| RU 2004110354 A, 20.10.2005. | |||

