Изобретение относится к области авиационной военной техники, в частности к беспилотному летательному аппарату воздушного старта с боевым зарядом, предназначенному для поражения широкой номенклатуры объектов, и способу его применения.
В настоящее время авиационные средства поражения самолетов фронтовой авиации в подавляющем большинстве случаев требуют внешнего целеуказания.
Из анализа уровня техники известны следующие способы наведения управляемых авиационных средств поражения самолетов фронтовой авиации: радиокомандный способ наведения, способ наведения по радиолокационному излучению, способ наведения по внешнему целеуказанию на источник лазерного подсвета и способ наведения по цели с заранее известными координатами.
При радиокомандном наведении авиационных средств поражения экипаж корректирует траекторию полета средств поражения по данным, получаемым с телевизионной головки наведения средств поражения. К недостаткам такого способа наведения следует отнести следующее: зависимость качества наведения от погодных условий, т.е. применение средств поражения в дождь, туман или сильную дымку значительно затрудняется; относительно небольшая дальность применения, которая ограничивается возможностями канала передачи данных, т.е. требуется, чтобы самолет-носитель находился на небольшом удалении от средства поражения; подверженность средства поражения помехам, т.е. существует необходимость в обеспечении стабильной радиосвязи для возможности непрерывного наведения.
При осуществлении способа наведения авиационных средств поражения на радиоизлучающую цель чувствительный элемент средства поражения постоянно принимает излучаемый целью сигнал. Соответственно для возможности применения такого способа цель должна непрерывно излучать радиоволны. В случае прекращения излучения целью радиоволн точность наведения средства поражения снижается и дальнейшее наведение может осуществляться лишь за счет прогнозирования координат точки излучения. При этом цель должна излучать радиоволны на определенной частоте, на которой работает чувствительный элемент средства поражения. Кроме того, чувствительный элемент средства поражения должен получать предварительное целеуказание от системы радиотехнической разведки самолета-носителя.
Способ наведения авиационных средств поражения на источник лазерного подсвета осуществляется с использованием отражения от цели сигнала и приема сигнала чувствительным элементом средства поражения, при этом источником сигнала является внешний элемент системы наведения. Соответственно прохождение сигнала зависит от погодных условий, т.е. применение средств поражения в дождь, туман или сильную дымку значительно затрудняется. Недостатком такого способа наведения также является необходимость внешнего источника подсвета и относительно небольшая дальность применения средства поражения, которая ограничивается возможностями внешнего источника подсвета и чувствительностью принимающего элемента средства поражения.
При наведении авиационных средств поражения по цели с заранее известными координатами средство поражения осуществляет поражение точки, ориентируясь по данным глобальной спутниковой навигационной системы и по данным собственной навигационной системы. При этом имеется большая вероятность подавления данных глобальной спутниковой навигационной системы на маршруте полета средства поражения и в районе цели, что может привести к значительному промаху средств поражения и является существенным недостатком.
Из патента RU 2380652 С1, опублик. 27.01.2010, Кл. F42B 25/00, известна управляемая авиационная бомба, содержащая корпус, оперение, узлы подвески, систему наведения и управления, и двигательный блок, включающий топливный бак, систему наддува топливного бака, турбореактивный двигатель, аппаратуру управления двигателем и систему подачи топлива к двигателю, выступающий за обводы корпуса и соединенный линией связи с системой наведения и управления.
Из патента RU 2595748 С1, опублик. 27.08.2016, Кл. F42B 15/00, известен управляемый боеприпас, включающий в себя носовой обтекатель, содержащий систему спутниковой навигации с антенной, корпус с устройством разделения, блок точного наведения и электронную аппаратуру управления.
Из патента RU №2778177, опублик. 15.08.2022, Кл. В64С 39/00, известен многофункциональный малогабаритный трансформируемый многоразовый беспилотный летательный аппарат в транспортно-пусковом контейнере, содержащий осесимметричный фюзеляж, сменные модули целевой нагрузки, блоки навигации, управления и двухсторонней радиосвязи, маршевую силовую установку, переходную раму, соосно соединенную с фюзеляжем стартово-разгонную ступень со стабилизаторами, складывающиеся крыло и рули.
Из патента RU №2687319, опублик. 13.05.2019, Кл. В64С 39/02, F41H 13/00, В64С 3/56, известен беспилотный ударный комплекс с изменяемой геометрией крыла, содержащий летательный аппарат с боевым элементом и блоком управления, спутниковую навигационную систему, видеокамеру, дальномер, электрически связанным с блоком управления. При этом крыло аппарата состоит из неподвижной и отделяемой частей. Неподвижная часть крыла жестко закреплена на корпусе летательного аппарата, отделяемая часть механически связана с неподвижной разрушаемым соединением и подпружиненными штифтами, входящими во втулки внутри неподвижной части.
Задача изобретения заключается в создании автономного авиационного средства поражения, имеющего возможность поражения широкой номенклатуры объектов, в том числе целей известного типа с неизвестными координатами в заданном районе поиска на значительном удалении от самолета-носителя.
Для решения поставленной задачи создан беспилотный летательный аппарат воздушного старта с боевым зарядом предназначенный для поражения широкой номенклатуры оперативно разведанных стационарных и движущихся объектов в условиях противодействия с автоматическим распознаванием типа цели и принятием решения на ее поражение включающий фюзеляж, содержащий головную часть, среднюю часть, хвостовую часть, силовую установку, сопло силовой установки, воздухозаборник силовой установки, стреловидное крыло, двухкилевое цельноповоротное оперение, боевую часть, расположенную внутри фюзеляжа, оптическую систему, датчики навигационной системы, датчик магнитного курса и бортовую интеллектуальную систему поиска и наведения на базе обученных нейросетей.
Фюзеляж беспилотного летательного аппарата воздушного старта в сечении имеет по существу трапициевидную форму с «завалом» бортов внутрь относительно плоскости симметрии летательного аппарата.
Двухкилевое цельноповоротное оперение беспилотного летательного аппарата воздушного старта наклонено под углом относительно плоскости симметрии летательного аппарата.
Беспилотный летательный аппарат воздушного имеет оптическую систему, которая содержит камеру, работающую в видимом диапазоне длин волн, либо камеру, работающую в инфракрасном диапазоне длин волн, либо систему камер, работающих как в видимом, так и в инфракрасном диапазоне длин волн.
Боевая часть беспилотного летательного аппарата воздушного старта представляет собой фугасный заряд, осколочно-фугасный заряд, осколочно-фугасный зажигательный заряд, кумулятивный заряд.
Способ применения беспилотного летательного аппарата воздушного старта включает транспортировку летательного аппарата на точке подвески самолета-носителя, обмен информацией между летательным аппаратом и воздушным командным пунктом или мобильным наземным пунктом управления, пуск летательного аппарата до линии боевого соприкосновения, автономный полет летательного аппарата по заданному в полетном задании маршруту, выход летательного аппарата в заданный район, поиск объектов поражения при полете по заданному в полетном задании маршруту или самостоятельно построенному маршруту поиска, передачу информации с камеры летательного аппарата об обнаруженных и распознанных целях в реальном масштабе времени на воздушный командный пункт или мобильный наземный пункт управления.
При осуществлении способа применения беспилотного летательного аппарата воздушного старта в случае обнаружения цели летательным аппаратом возможны следующие варианты его применения: беспилотный летательный аппарат самостоятельно принимает решение на поражение цели согласно базе данных целей и соответствующей таблице приоритетов целей или оператор принимает решение на поражение цели.
Изобретение обеспечивает достижение следующего технического результата.
Беспилотный летательный аппарат является автономным и не требует предварительного целеуказания, обладает малой радиолокационной заметностью, малыми габаритами, малым аэродинамическим сопротивлением, обладает возможностью применяться по широкой номенклатуре поражаемых целей в любое время суток и в любых метеорологических условиях, обеспечивает нанесение максимального урона, имеет возможность применения на значительном удалении от самолета-носителя, обеспечивает безопасность самолету-носителю, повышает вероятность обнаружения и поражения цели, как открыто расположенной, так и скрывающейся, позволяет вести попутную разведку и передачу информации, имеет простую конструкцию, является дешевым и доступным в массовом производстве.
Изобретение поясняется следующими изображениями:
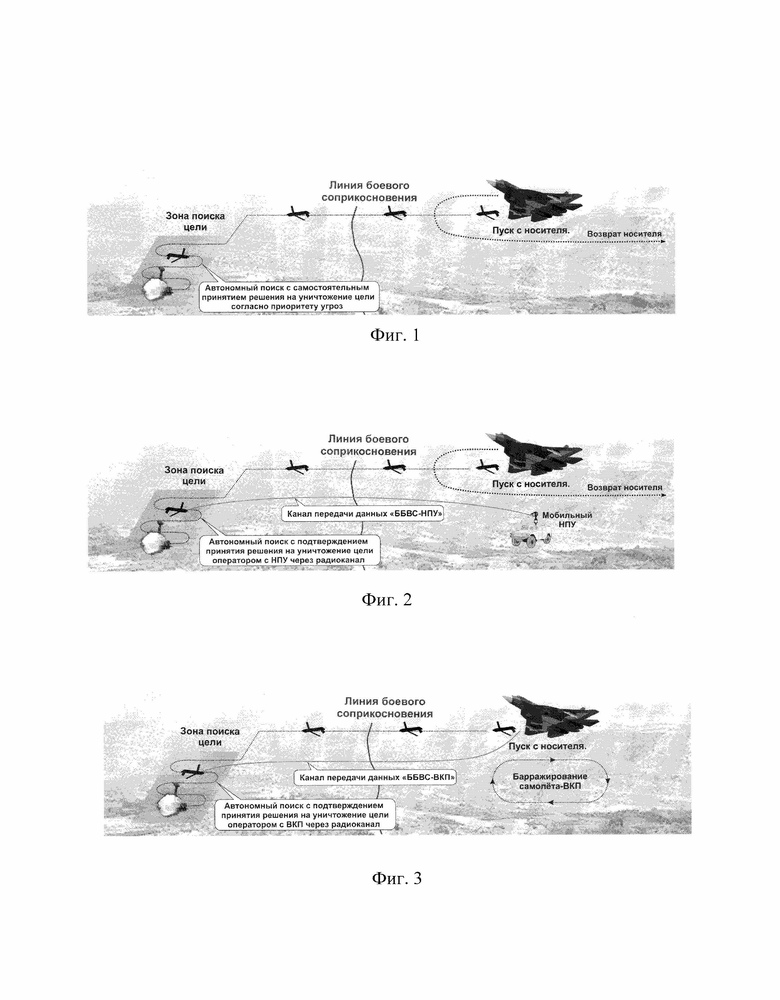
фиг. 1 - Тактика автономного применения беспилотного летательного аппарата;
фиг. 2 - Тактика применения беспилотного летательного аппарата совместно с мобильным наземным пунктом управления (НПУ);
фиг. 3 - Тактика применения беспилотного летательного аппарата совместно с воздушным командным пунктом (ВКП).
Беспилотный летательный аппарат воздушного старта представляет собой барражирующий боеприпас и предназначен для однократного применения. Беспилотный летательный аппарат воздушного старта включает фюзеляж, стреловидное крыло, двухкилевое цельноповоротное оперение, воздухозаборник, сопло и узлы крепления. Внутри фюзеляжа беспилотного летательного аппарата размещена боевая часть. Беспилотный летательный аппарат имеет силовую установку, оптическую систему, датчики навигационной системы и бортовую интеллектуальную систему поиска и наведения на базе обученных нейросетей.
Фюзеляж беспилотного летательного аппарата состоит из головной части, средней части, хвостовой части. На нижней поверхности головной части фюзеляжа беспилотного летательного аппарата расположено окно оптической системы. На верхней поверхности средней части фюзеляжа расположен воздухозаборник силовой установки. В хвостовой части фюзеляжа летательного аппарата находится сопло силовой установки.
Оперение беспилотного летательного аппарата составляют стреловидное крыло и двухкилевое цельноповоротное оперение. Стреловидное крыло и двухкилевое цельноповоротное оперение выполнены с возможностью складывания. Стреловидное крыло включает правую и левую складные консоли. Двухкилевое цельноповоротное оперение включает правую и левую складные консоли. В транспортировочном положении консоли стреловидного крыла убраны под нижнюю поверхность фюзеляжа внахлест. В полетном положении консоли стреловидного крыла проворачиваются и занимают полетное положение. В транспортировочном положении консоли двухкилевого цельноповоротного оперения сложены вдоль боковой поверхности фюзеляжа. В полетном положении консоли двухкилевого цельноповоротного оперения проворачиваются и занимают полетное положение и являются продолжением боковой образующей фюзеляжа. Выполнение консолей стреловидного крыла и двухкилевого цельноповоротного оперения беспилотного летательного аппарата складными обеспечивает снижение габаритов беспилотного летательного аппарата, минимизацию аэродинамического сопротивления при транспортировке, а также возможность размещения беспилотного летательного аппарата во внутренних отсеках самолета-носителя.
Форма фюзеляжа беспилотного летательного аппарата в сечение представляет собой по существу трапецию с «завалом» бортов внутрь относительно плоскости симметрии беспилотного летательного аппарата. Стреловидное крыло и двухкилевое цельноповоротное оперение беспилотного летательного аппарата наклонены под углом относительно плоскости симметрии беспилотного летательного аппарата. Воздухозаборник и сопло расположены вне прямой видимости при обзоре летательного аппарата снизу. Такое конструктивное выполнение беспилотного летательного аппарата обеспечивает минимизацию пиков отражения радиоволн от его поверхности, что обеспечивает минимизацию эффективной поверхности рассеяния, т.е. малую радиолокационную заметность беспилотного летательного аппарата.
Узлы крепления беспилотного летательного аппарата представляют собой передние и задние бугели, предназначенные для крепления беспилотного летательного аппарата к авиационным катапультным устройствам (АКУ) или универсальным внутрифюзеляжным катапультным устройствам (УВКУ).
Беспилотный летательный аппарат применяется со штатных авиационных катапультных устройств типа АКУ-58 с внешних точек подвески и с универсальных внутрифюзеляжных катапультных устройств типа УВКУ-50 с внутренних точек подвески самолетов фронтовой авиации.
Внутри фюзеляжа беспилотного летательного аппарата расположена боевая часть. Беспилотный летательный аппарат может комплектоваться различными типами боевых частей: фугасный заряд, осколочно-фугасный заряд, осколочно-фугасный зажигательный заряд или кумулятивный заряд. Возможность размещения в качестве боевой части беспилотного летательного аппарата различных типов снарядов обеспечивает поражение широкой номенклатуры целей. Таким образом, беспилотный летательный аппарат позволяет уничтожать бронированные и небронированные цели, нанося максимальный урон.
Силовая установка беспилотного летательного аппарата представлена одним турбореактивным двигателем, обеспечивающим полет на высотах от 0 до 8 км и скоростях, соответствующих числам Маха М от 0,11 до 0,6.
Оптическая система беспилотного летательного аппарата содержит камеру, работающую в видимом диапазоне длин волн, либо камеру, работающую в инфракрасном диапазоне длин волн, либо систему камер, работающих как в видимом, так и в инфракрасном диапазоне длин волн.
Оптическая система беспилотного летательного аппарата совместно с бортовой интеллектуальной системой поиска и наведения на базе обученных нейросетей обеспечивает автономное обнаружение и распознавание целей и наведение беспилотного летательного аппарата на цель. При использовании камеры, работающей в ближнем и/или дальнем инфракрасном диапазоне длин волн, обнаружение и распознавание целей возможно в любое время суток и любых метеорологических условиях.
Бортовая интеллектуальная система поиска и наведения на базе обученных нейросетей позволяет осуществить автономный поиск и самостоятельное принятие решения на поражение целей, что позволяет самолету-носителю не входить в зону действия противовоздушной обороны противника, что обеспечивает безопасность самолета-носителя и применение беспилотного летательного аппарата в значительном удалении от самолета-носителя, а также обеспечивает ведение беспилотным летательным аппаратом разведки и передачу информации об обнаруженных целях на наземный пункт управления или воздушный командный пункт до момента поражения одной из целей. На наземный пункт управления или воздушный командный пункт передается разведывательная информация об обнаруженных целях, телеметрическая информация о работоспособности и месте нахождения беспилотного летательного аппарата, кадры видеофиксации цели перед ее поражением.
Тактика применения беспилотного летательного аппарата заключается в следующем.
Беспилотный летательный аппарат транспортируется на точке подвески самолета-носителя. Беспилотный летательный аппарат может управляться как с самолета-носителя, играющего роль воздушного командного пункта, так и с мобильного наземного пункта управления, а также полностью автономно. В процессе транспортировки беспилотного летательного аппарата на борт самолета-носителя или мобильный наземный пункт управления передается информация о работоспособности беспилотного летательного аппарата и готовности к пуску. Информационный обмен осуществляется до момента отделения и после отделения беспилотного летательного аппарата от самолета-носителя в пределах действия комплекса средств связи.
Пуск беспилотного летательного аппарата осуществляется до линии боевого соприкосновения. Далее беспилотный летательный аппарат осуществляет автономный полет по заданному в полетном задании маршруту с использованием датчиков навигационных систем. При выходе в заданный район цели беспилотный летательный аппарат начинает поиск по заданному в полетном задании маршруту или строит самостоятельный оптимальный маршрут поиска в заданном районе цели. Данные с камеры беспилотного летательного аппарата и информация об обнаруженных и/или распознанных целях в реальном масштабе времени передаются на воздушный командный пункт или на мобильный наземный пункт управления.
Далее, при обнаружении цели возможны два принципиально разных варианта применения беспилотного летательного аппарата. В первом варианте беспилотный летательный аппарат действует автономно, без использования мобильного наземного пункта управления и воздушного командного пункта (фиг. 1). Во втором варианте беспилотный летательный аппарат действует с использованием внешнего целеуказания совместно с мобильным наземным пунктом управления по системе связи беспилотного летательного аппарата с наземным пунктом управления «ББВС-НПУ» (фиг. 2) или с воздушным командным пунктом по системе связи беспилотного летательного аппарата с воздушным командным пунктом управления «ББВС-ВКП» (фиг. 3).
В случае использования тактики действия беспилотного летательного аппарата в автономном режиме поражение цели происходит следующим образом. После обнаружения и автономного распознавания цели (без участия оператора) беспилотный летательный аппарат самостоятельно принимает решение на поражение цели согласно базе данных целей и соответствующей таблице приоритетов целей. Для реализации этого варианта применения беспилотный летательный аппарат имеет способность к автоматическому обнаружению и распознаванию максимально большого количества типов целей. При этом связь беспилотного летательного аппарата с наземным пунктом управления («ББВС-НПУ») или с воздушным командным пунктом управления («ББВС-ВКП») может сохраняться для возможности передачи информации о состоянии беспилотного летательного аппарата, его координатах, типов и координатах обнаруженных целей.
Автономная тактика действия беспилотного летательного аппарата имеет следующие преимущества. Отсутствует необходимость внешнего целеуказания, т.е. беспилотный летательный аппарат самостоятельно ищет цель в районе поиска при помощи оптической системы. Отделение беспилотного летательного аппарата происходит до линии боевого соприкосновения, что позволяет не подвергать риску дорогостоящий самолет-носитель и обеспечить безопасность самолету-носителю. После пуска беспилотного летательного аппарата от самолета-носителя беспилотный летательный аппарат полностью автономен, т.е. обладает полной независимостью от самолета-носителя, а самолет-носитель может возвращаться на аэродром базирования или осуществлять выполнение задач согласно своему полетному заданию. Таким образом, беспилотный летательный аппарат характеризуется большой дальностью применения.
Во втором варианте применения беспилотного летательного аппарата оператор принимает решение на поражение цели. При этом обнаружение и распознавание обнаруженных типов целей осуществляется автоматически беспилотным летательным аппаратом, маркирование цели осуществляется оператором. При этом цель также может быть маркирована оператором без автоматического обнаружения и распознавания беспилотным летательным аппаратом.
В обоих случаях после перехода в режим «Атака» беспилотный летательный аппарат автономно формирует траекторию полета до цели для ее поражения. Если в течение отведенного времени цель не найдена, то беспилотный летательный аппарат осуществляет уничтожение цели с заранее известными координатами, заложенными в полетном задании.
В случае обнаружения в районе поиска нескольких целей беспилотный летательный аппарат может передавать информацию о них на наземный пункт управления или воздушный командный пункт. Обнаруженные цели могут быть поражены или вновь запущенными беспилотными летательными аппаратами или другими огневыми средствами, например, такими как средства ствольной или реактивной артиллерии, армейской или фронтовой авиации, на которые будет передана информация об обнаруженных целях для их дальнейшего поражения.
В течение времени полета беспилотного летательного аппарата наземный пункт контроля или воздушный командный пункт в режиме реального времени может получать следующую информацию: данные о работоспособности и исправности систем беспилотного летательного аппарата, навигационную и иную информацию о беспилотном летательном аппарате, информацию об обнаруженных и распознанных целях (тип цели и ее координаты), фиксацию результатов боевого применения (отрезок видео или графическая картинка, переданная беспилотным летательным аппаратом, незадолго до поражения цели в целях решения задачи фиксации результата боевого применения). Оперативная передача информации с беспилотного летательного аппарата на наземный пункт контроля или воздушный командный пункт используется для оценки обнаруженных целей в заданном районе, а также в качестве материала обучения нейросети на обнаружение и распознавание новых типов целей.
Возможные варианты тактики действия беспилотного летательного аппарата обеспечивают повышение эффективности обнаружения и поражения целей.
Таким образом, конструктивно-компоновочное выполнение беспилотного летательного аппарата, воплощенное в составляющих его элементах и их расположении, обеспечивает малозаметность, малые габариты, малое аэродинамическое сопротивление, возможность автономного применения летательного аппарата без предварительного целеуказания, применение летательного аппарата в любое время суток и в любых метеоусловиях, расширение номенклатуры поражаемых целей, в частности оперативно разведанных стационарных и движущихся объектов противника в заданном районе поиска целей в условиях противодействия противника, автоматическое распознавание типа цели, увеличение дальности применения летательного аппарата, безопасность самолета носителя при запуске летательного аппарата, ведение летательным аппаратом разведки и передачу информации, в том числе об обнаруженных целях на наземный пункт управления или воздушный командный пункт до момента поражения одной из обнаруженных целей.
Беспилотный летательный аппарат воздушного старта характеризуется высокой эффективностью поражения целей, является дешевым и доступным и для массового производства.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ МАЛОЗАМЕТНЫЙ САМОЛЕТ | 2023 |
|
RU2807624C1 |
| АВИАКОМПЛЕКС БОЕВОЙ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2023 |
|
RU2827270C1 |
| ВЫСОКОСКОРОСТНОЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2464203C2 |
| МНОГОЦЕЛЕВОЙ ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2008 |
|
RU2370414C1 |
| МНОГОРЕЖИМНЫЙ САМОЛЕТ-РАЗГОНЩИК АВИАЦИОННОГО РАКЕТНО-КОСМИЧЕСКОГО КОМПЛЕКСА | 1999 |
|
RU2175934C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСФОРМИРУЕМЫЙ МНОГОРАЗОВЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ И СПОСОБЫ СТАРТА | 2022 |
|
RU2778177C1 |
| БЕРЕГОВОЙ КОМПЛЕКС АВИАЦИОННО-РАКЕТНЫЙ МНОГОРАЗОВЫЙ АВТОНОМНЫЙ | 2021 |
|
RU2768999C1 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| МНОГОЦЕЛЕВАЯ БЕСПИЛОТНАЯ АВИАЦИОННАЯ РАКЕТНАЯ СИСТЕМА | 2022 |
|
RU2791754C1 |
| Беспилотный транспортный модуль и способ его применения | 2024 |
|
RU2825031C1 |
Группа изобретений относится к беспилотному летательному аппарату и способу его применения. Беспилотный летательный аппарат содержит фюзеляж с головной, средней и хвостовой частями, силовую установку с соплом и воздухозаборником, стреловидное крыло, двухкилевое цельноповоротное оперение, боевую часть, расположенную внутри фюзеляжа, оптическую систему, датчики навигационной системы и бортовую интеллектуальную систему поиска и наведения на базе обученных нейросетей. Для применения беспилотного летательного аппарата осуществляют его транспортировку самолетом-носителем, пуск и полет по заданному маршруту для выхода в заданный район, осуществляют поиск объектов поражения, их распознавание, передачу информации об обнаруженных и распознанных целях на воздушный командный пункт или мобильный наземный пункт управления, принимают решение о поражении объекта самостоятельно или с помощью оператора пункта управления. Обеспечивается увеличение дальности поражения целей и повышение безопасности самолета-носителя. 2 н. и 6 з.п. ф-лы, 3 ил.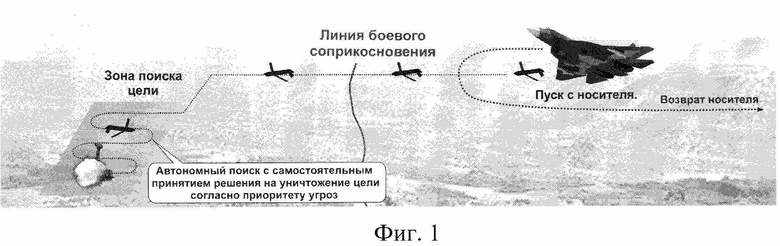
1. Беспилотный летательный аппарат воздушного старта, предназначенный для поражения широкой номенклатуры оперативно разведданных стационарных и движущихся объектов в условиях противодействия с автоматическим распознаванием типа цели и принятием решения на ее поражение, включающий фюзеляж, содержащий головную часть, среднюю часть, хвостовую часть, силовую установку, сопло силовой установки, воздухозаборник силовой установки, стреловидное крыло, двухкилевое цельноповоротное оперение, боевую часть, расположенную внутри фюзеляжа, оптическую систему, датчики навигационной системы и бортовую интеллектуальную систему поиска и наведения на базе обученных нейросетей.
2. Беспилотный летательный аппарат воздушного старта по п. 1, в котором фюзеляж в сечении имеет по существу трапециевидную форму с «завалом» бортов внутрь относительно плоскости симметрии беспилотного летательного аппарата.
3. Беспилотный летательный аппарат воздушного старта по п. 1, в котором двухкилевое цельноповоротное оперение наклонено под углом относительно плоскости симметрии беспилотного летательного аппарата.
4. Беспилотный летательный аппарат воздушного старта по п. 1, в котором оптическая система содержит камеру, работающую в видимом диапазоне длин волн, либо камеру, работающую в инфракрасном диапазоне длин волн, либо систему камер, работающих как в видимом, так и в инфракрасном диапазоне длин волн.
5. Беспилотный летательный аппарат воздушного старта по п. 1, в котором боевая часть представляет собой фугасный заряд, осколочно-фугасный заряд, кумулятивный заряд.
6. Способ применения беспилотного летательного аппарата воздушного старта, включающий транспортировку беспилотного летательного аппарата на точке подвески самолета-носителя, обмен информацией между беспилотным летательным аппаратом и воздушным командным пунктом или мобильным наземным пунктом управления, пуск беспилотного летательного аппарата до линии боевого соприкосновения, автономный полет беспилотного летательного аппарата по заданному в полетном задании маршруту, выход беспилотного летательного аппарата в заданный район, поиск объектов поражения при полете по заданному в полетном задании маршруту или самостоятельно построенному маршруту поиска, передачу информации с камеры беспилотного летательного аппарата об обнаруженных и распознанных целях в реальном масштабе времени на воздушный командный пункт или мобильный наземный пункт управления.
7. Способ применения беспилотного летательного аппарата воздушного старта по п. 6, при осуществлении которого после обнаружения цели беспилотный летательный аппарат самостоятельно принимает решение на поражение цели согласно базе данных целей и соответствующей таблице приоритетов целей.
8. Способ применения беспилотного летательного аппарата воздушного старта по п. 6, при осуществлении которого после обнаружения цели оператор принимает решение на поражение цели.
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2690142C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2461494C2 |
| US 11440656 B2, 13.09.2022 | |||
| US 20210034843 A1, 04.02.2021 | |||
| DE 0059913732 D1, 14.09.2006. | |||
