Изобретение касается грузоподъемных устройств и может быть использовано для подъема ферромагнитных грузов, в частности служить захватом для манипулятора промышленных роботов.
Цель изобретения - увеличение диапазона захватываемых изделий.
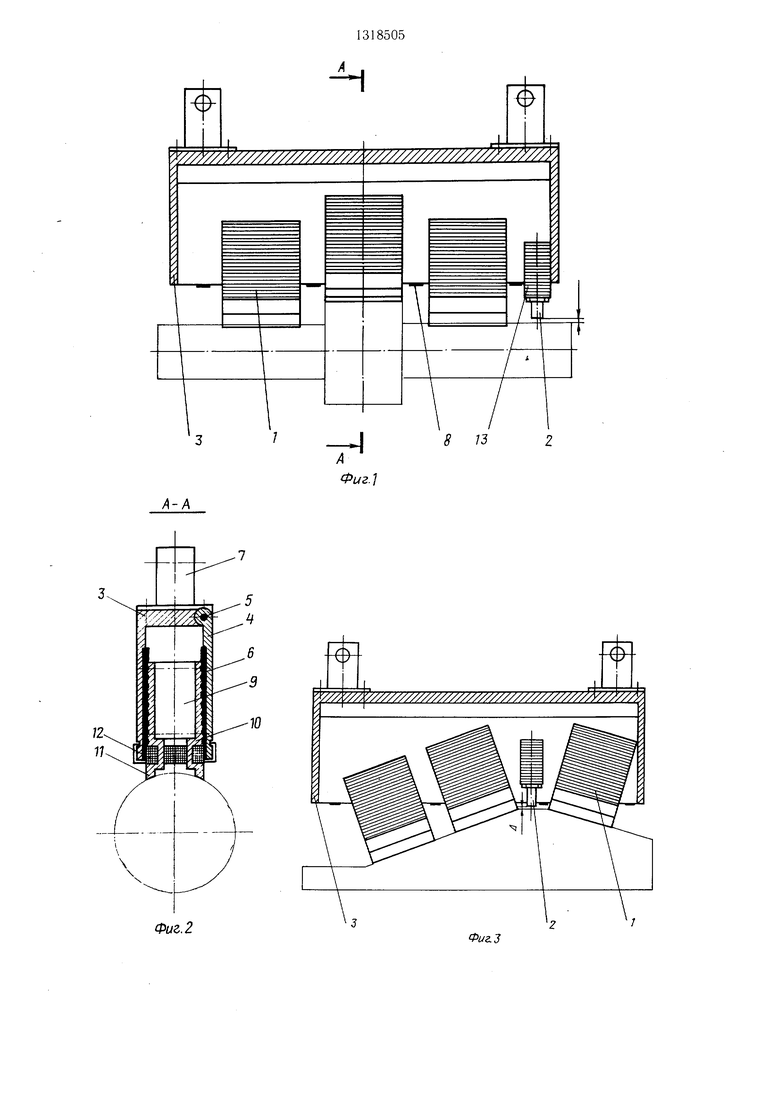
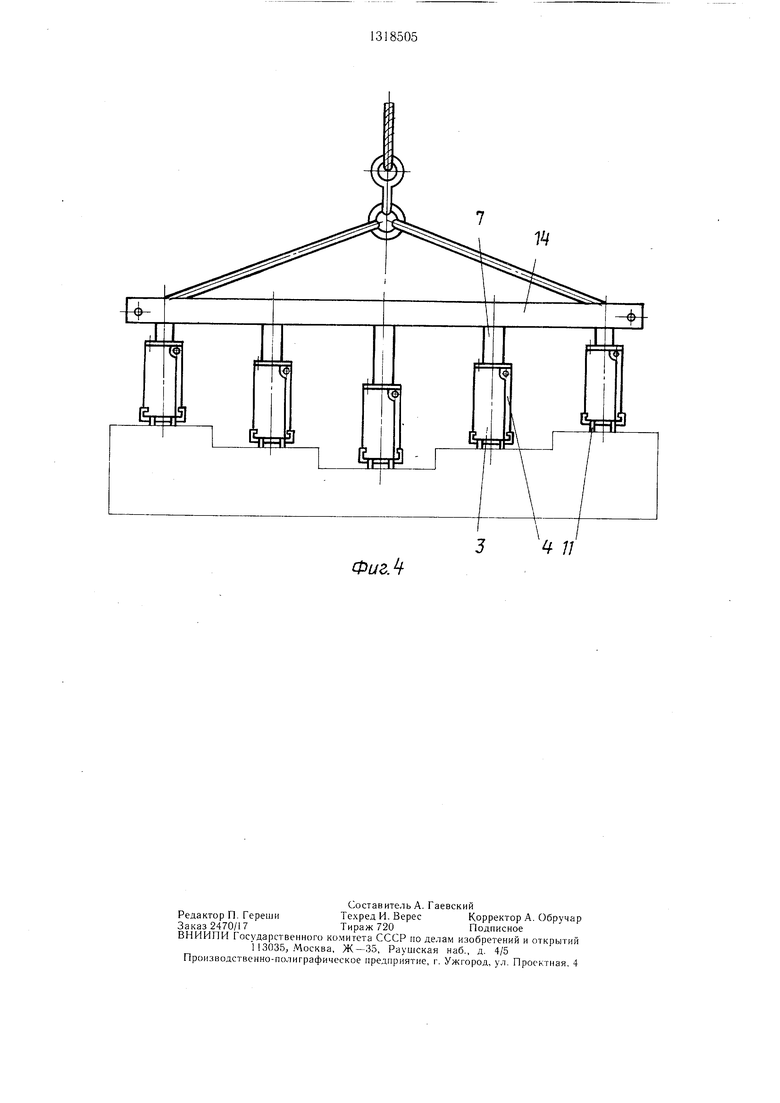
На фиг. 1 изображено устройство, удерживающее деталь; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - пример настройки устройства; на фиг. 4 - пример образования группового захвата из совокупности устройств.
Устройство содержит набор электромагнитов 1 и индукционный датчик 2 наличия деталей, устанавливаемый в корпусе 3 в соответствии с профилем поверхности захватываемой детали. Стенка-клапан 4 соединена с корпусом 3 с возможностью качания на оси 5. Внутренние поверхности корпуса 3 и стенки-клапана 4 снабжены эластичными накладками 6, например, из резины. Корпус 3 имеет регулируемые подвески 7 для крепления на руке манипулятора или грузоподъемного механизма. На стенке-клапане 4 и противоположной ей стенке корпуса 3 выполнены пазы под отогнутые концы плоских пружин 8.
Каждый электромагнит 1 содержит постоянный магнит 9 и пару магнитопроводов 10 с расположенными на их полюсных концах 11 электромагнитными катушками 12. Наружные поверхности магнитопроводов 10 и корпуса 13 датчика 2 для лучшего сцепления с внутренними поверхностями с накладками 6 корпуса 3 и стенки-клапана 4 выполнены рифлеными. Устройство содержит также металлоконструкцию 14.
Перед работой устройство должно быть настроено на соответствующую деталь, что осуществляется следующим образом.
Электромагниты 1 устанавливаются на детали симметрично относительно ее центра тяжести, а так как на полюсных концах 11 магнитопроводов 10 образованы полюса N-S, то они сами будут стоять на детали, притягиваемые полем постоянных магнитов 9.
Одевают на электромагниты 1 корпус 3, а стенкой-клапаном 4 и пружинами 8 закрепляют их относительно корпуса 3, предварительно вставив датчик 2.
Устройство, установленное на руке манипулятора и подключенное к системе управления, готово к работе.
Для деталей сложной и большей поверхности можно закрепить регулируемыми подвесками 8 на металлоконструкции 14 несколько аналогичных захватов.
Манипулятор опускает устройство на
деталь и все полюсные концы 11 магнитопроводов 10 контактируют с соответствующими поверхностями детали, происходит захват. Датчик 2, установленный с зазором от
Q соответствующей поверхности детали, подтверждает ее наличие. После транспортировки детали в место обработки производится отпускание детали путем включения электромагнитных катушек 12 на обратную полярность, что приводит к размагничива5 нию полюсных концов 11 и деталь раскрепляется, а манипулятор отводит захватное устройство не включая катушки 12 от детали на некоторое расстояние, где катушки 12 обесточиваются.
Q Для повышения надежности захвата детали (преодоление инерции покоя, сил зажатия данной детали другими, помех подающих устройств и т. п.) электромагнитные катущки 12 во время захватывания детали могут включаться согласно (по полю)
5 с постоянными магнитами 9, тем самым увеличивать силу притяжения. Для повышения надежности удерживания детали во время ее транспортировки (вибрация, рывки, резкие остановы) катушки 12 могут переключаться на .меньший по величине ток удержания.
Формула изобретения
1.Захватное устройство, содержащее соединяемый с подъемным механизмом корпус с установленными в нем электромагни5 тами, и приспособление для фиксации электромагнитов в рабочем положении, отличающееся тем, что, с целью увеличения диапазона захватываемых изделий, корпус выполнен открытым снизу и с одной шарнирной
Q стенкой, а устройство снабжено закрепленными на внутренней поверхности стенок корпуса эластичными накладками, при этом приспособление для фиксации электромагнитов представляет собой плоскую пружину с отогнутыми концами, взаимодействующими
5 с наружной поверхностью стенок корпуса в их нижней части.
2.Устройство по п. 1, отличающееся тем, что магнитопроводы электромагнитов выполнены с параллельными рифлеными плоскостями для взаимодействии с эластичными нак0
ладками.
8 73
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ ЗАХВАТ МАНИПУЛЯТОРА | 1990 |
|
RU2016757C1 |
| Многопозиционный электромагнитный захват | 1990 |
|
SU1726241A1 |
| Электромагнитная плита | 1977 |
|
SU727398A1 |
| Электромагнитное захватное устройство | 1987 |
|
SU1527122A1 |
| Грузозахватное устройство | 1980 |
|
SU874566A1 |
| Электромагнитное захватное устройство | 1990 |
|
SU1811481A3 |
| Схват | 1990 |
|
SU1811477A3 |
| Захватное устройство для мягких деталей | 1990 |
|
SU1811482A3 |
| Электромагнитный схват | 1986 |
|
SU1315306A1 |
| Электромагнитный схват | 1990 |
|
SU1798187A1 |
Изобретение относится к области подъемно-транспортной техники, в частности к захватным устройствам. Цель изобретения - увеличение диапазона захватываемых изделий. Захватное устройство содержит набор электромагнитов и индукционный датчик наличия деталей, расположенные в кор- нусе. Корпус выполнен с одной стенкой-клапаном, соединенной с ним посредством оси. Внутренние поверхности корпуса снабжены эластичными накладками. Каждый электромагнит включает в себя постоянный магнит и магнитопроводы с электромагнитными катушками на их полюсных концах. Наружные поверхности магнитопроводов выполнены рифлеными. 1 з.п. ф-лы ,4 нл. со 00 ел
Фиг. 2
Фиг.3
//
ФигА
| Электромагнитное грузозахватное устройство | 1979 |
|
SU787334A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
