Изобретение относится к системам связи и может быть использовано для расширения зоны обслуживания в районах, где отсутствует или наблюдается неустойчивый прием радиотелевизионного сигнала СВЧ.
Причиной этого является рельеф местности: прямому прохождению сигнала препятствует наличие холма или горной преграды или точка приема расположена в ложбине. В таких случаях используют специальные линии СВЧ-связи и ретрансляторы. Источником радиотелевизионного сигнала может быть наземный источник или космический аппарат (КА).
Известны способы наведения антенн космических аппаратов, в которых используют технические средства систем ориентации и навигации КА (Бартенев В.А., Болотов Г.В., Быков В.Л. и др. Под редакцией Кантора Л.А. Спутниковая связь и вещание. - М.: Радио и связь, 1997, с.334-349). При этом точность наведения антенны на заданную точку на поверхности Земли определяется погрешностями угловой стабилизации КА, ошибками установки антенны на посадочные поверхности КА относительно системы координат, связанной с КА, погрешностями системы координат КА относительно системы координат, связанной с Землей, погрешностями при изготовлении антенны. Точность наведения таких антенн невелика (на уровне 30-60 угловых минут).
Недостатками такого способа наведения антенн являются относительно невысокая точность, обусловленная, прежде всего, техническими характеристиками КА, а также отсутствие достаточно точной автономной системы наведения антенны.
В наземных станциях спутниковой связи, которые обычно представляют собой приемо-передающие радиостанции с одной общей антенной (на прием и на передачу) для наведения антенны используются способы наведения, в которых проводят режим программного наведения в заданную точку пространства, а также режим точного наведения по принимаемому сигналу, в который переходят с помощью поиска и захвата сигнала (Покрас А.М., Сомов А.М., Цуриков Г.Г. Антенны земных станций спутниковой связи. - М.: Радио и связь, 1985, с.35-76). В режиме точного наведения по принимаемому сигналу могут использоваться различные методы наведения по принимаемому сигналу: метод экстремального наведения, моноимпульсный метод и др. Недостатком данных способов является трудность реализации точного программного наведения антенны, что связано с необходимостью использования достаточно сложных точных измерительных средств.
Прототипом изобретения является способ наведения антенны, реализованный в устройстве контроля и наведения антенн фирмы VERTEX - модель 7200 ACS (Model 7200 antenna control system), предназначенном для контроля антенн земных станций спутниковой связи и содержащем параболическую зеркальную антенну с СВЧ-блоком и блоками азимутальной и угломестной осей, блок наведения антенны, вычислительное устройство, снабженное программами, включая программы наведения антенны (Фролов О.П. Антенны для земных станций спутниковой связи. - М.: Радио и связь, 2000, с.215-219).
В данном способе осуществляют режим программного наведения антенны по углу места и азимуту в заданную точку пространства, а также режим точного наведения антенны на источник сигнала с использованием автосопровождения (т.е. работы по принимаемому сигналу). Режим точного наведения антенны осуществляют путем перехода из режима программного наведения с использованием поиска и захвата сигнала. Точное наведение антенны на источник сигнала также производят при постоянном программном наведении антенны по корректируемым углу места и азимуту с периодическим включением автосопровождения для уточнения угла места и азимута источника сигнала.
Программное наведение антенны по углу места и азимуту производят путем разворота антенны на рассчитанные в вычислительном устройстве углы от базовых измерительных плоскостей:
- плоскости горизонта - для угла места;
- плоскости меридиана - для азимута.
Недостатком данного способа наведения антенны является относительно невысокая точность программного наведения. Это обусловлено, в первую очередь, ошибками построения базовых измерительных плоскостей.
Повышение точности программного наведения передающей антенны может быть обеспечено с помощью дополнительных технических средств. По углу места можно использовать известный метод с проверкой теодолитом или уровнем ошибки выставки станции относительно плоскости горизонта и с компенсацией этой ошибки с помощью шайб и прокладок. Указанная операция достаточно трудоемка. Кроме того, обеспечение высокой точности (на уровне 3 угловых минут) представляет существенные трудности.
Погрешность определения меридиана может быть снижена при использовании точных дополнительных измерительных средств (гирокомпас, точный радиокомпас, астросредства), которые из-за высокой стоимости и редкого использования нецелесообразно вводить в состав станции.
Задачей предлагаемого изобретения является повышение точности наведения передающей антенны ретранслятора, а также исключение использования дополнительной аппаратуры для наведения передающей антенны при эксплуатации и, соответственно, упрощение и снижение стоимости эксплуатации.
Достигаемый при этом технический результат заключается в повышении точности наведения передающей антенны ретранслятора, в исключении использования дополнительной аппаратуры для наведения передающей антенны при эксплуатации ретранслятора, а также в упрощении эксплуатации.
Для достижения указанного технического результата предложен способ наведения передающей антенны ретранслятора на абонентскую станцию, при котором производят наведение приемной антенны ретранслятора на источник сигнала, причем при операции наведения проводят разворот приемной антенны по азимуту и углу места до захвата сигнала, а затем точное наведение приемной антенны по азимуту и углу места с использованием программного наведения с коррекцией по принимаемому сигналу, а также производят наведение передающей антенны ретранслятора на абонентскую станцию на рассчитанные азимут и угол места, при этом перед наведением приемной антенны на источник сигнала проводят разворот этой антенны по азимуту на угол до ста восьмидесяти градусов и для не менее трех различных азимутальных углов измеряют значения погрешности ретранслятора относительно плоскости горизонта с помощью датчика угла, установленного на азимутальной оси приемной антенны, измеренные значения погрешности используют для определения параметров движения приемной антенны по углу места, после этого производят разворот по азимуту приемной антенны до захвата сигнала, при этом одновременно в соответствии с найденными параметрами меняют угол места приемной антенны, затем в режиме точного наведения приемной антенны на источник сигнала поочередно увеличивают и уменьшают азимут на одинаковые углы, при этом для обоих углов значения принимаемого сигнала составляют от семидесяти пяти до восьмидесяти пяти процентов от значения сигнала, соответствующего режиму точного наведения, полученные в этих положениях оба значения сигнала используют для уточнения положения источника сигнала по азимуту, полученное уточненное положение источника сигнала учитывают при наведении передающей антенны на абонентскую станцию по азимуту, после этого приемную антенну разворачивают по азимуту на угол, соответствующий азимуту абонентской станции, а затем приемную антенну разворачивают по азимуту на сто восемьдесят градусов, в обоих положениях измеряют с помощью датчика угла погрешность ретранслятора относительно плоскости горизонта, данные измерения используют для определения уточненной величины погрешности ретранслятора относительно плоскости горизонта, которую учитывают при наведении передающей антенны на абонентскую станцию по углу места, после чего передающую антенну наводят по рассчитанным азимуту и углу места на абонентскую станцию, причем при наведении по азимуту используют уточненное положение источника сигнала, а при наведении по углу места уточненную величину погрешности ретранслятора относительно плоскости горизонта.
Предлагаемый способ реализуется в ретрансляторе благодаря использованию дополнительного датчика угла, установленного на азимутальной оси приемной антенны, а также проведению дополнительных операций при наведении передающей и приемной антенн.
В качестве примера рассматриваем остронаправленную параболическую зеркальную антенну с шириной диаграммы направленности - φДН, равной 30 угловым минутам.
Для частот от 8 до 12 ГГц диаметр такой антенны должен быть от 5,2 до 3,5 метра.
Достаточно высокой считается точность наведения антенны с потерями по мощности 0,5 дБ, что соответствует погрешности наведения рассматриваемой антенны 6 угловых минут, т.е. ±0,2φДН.
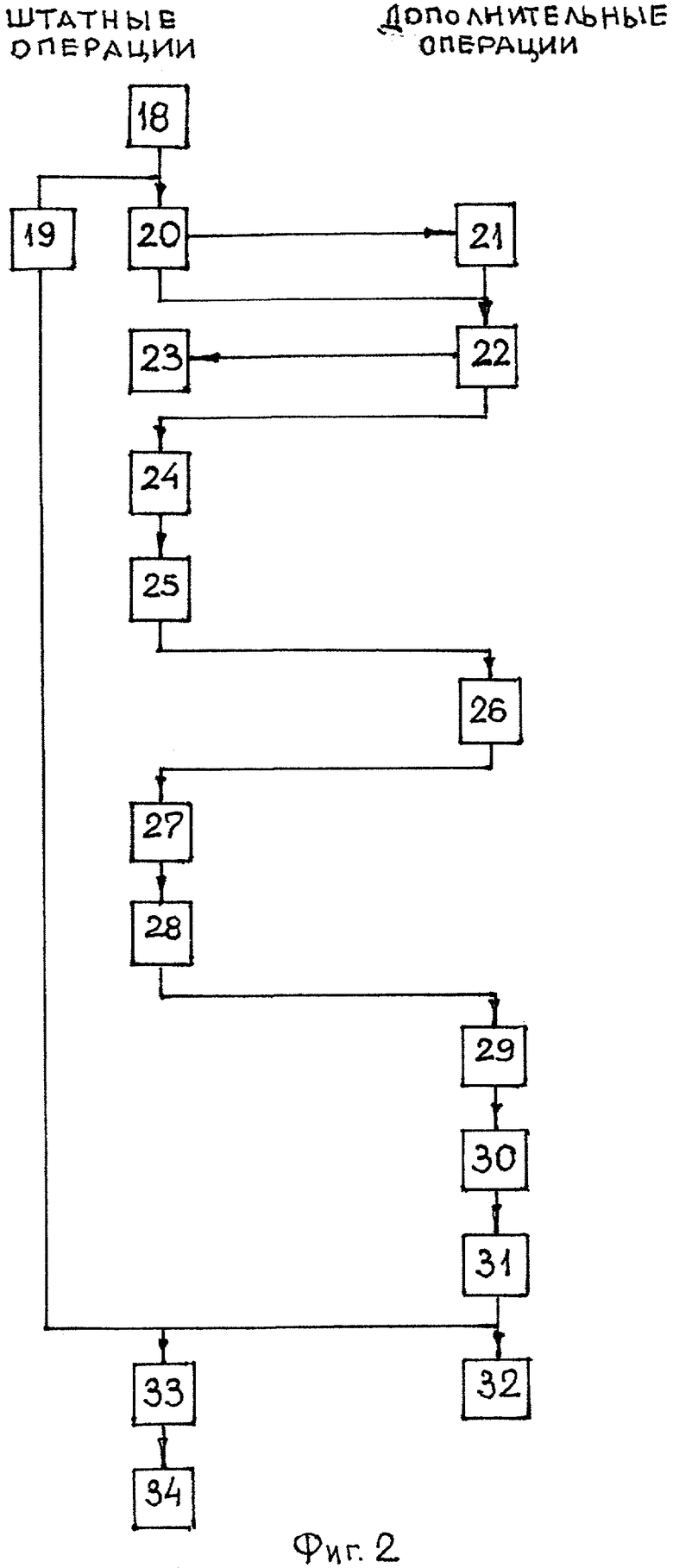
Способ иллюстрируется фиг.1-4, на которых приведены: на фиг.1 - функциональная схема ретранслятора, на фиг.2 - блок-схема операций наведения приемной и передающей антенн ретранслятора, на фиг.3 - пример трехпозиционного по углу места азимутального разворота приемной антенны, на фиг.4 - пример определения границ позиций при трехпозиционном по углу места азимутальном развороте приемной антенны.
Ретранслятор, изображенный на фиг.1, содержит приемную антенну 1, на которой установлен СВЧ-блок 2 приемной антенны, соединенный с размещенным на передающей антенне 3 СВЧ-блоком 4 передающей антенны. СВЧ-блок 2 и СВЧ-блок 4 предназначены для усиления, фильтрации и преобразования частоты ретранслируемого СВЧ-сигнала. Второй выход СВЧ-блока 2 приемной антенны соединен с блоком 5 наведения приемной антенны, предназначенным для преобразования СВЧ-сигнала в сигнал, используемый для точного наведения приемной антенны 1. Для управления по азимутальной оси 6 приемной антенны ретранслятор содержит блок 7 азимутальной оси приемной антенны, а для управления по угломестной оси 8 приемной антенны - блок 9 угломестной оси приемной антенны. На азимутальной оси приемной антенны установлен датчик 10 угла, например маятникового типа, используемый для измерения погрешности выставки ретранслятора относительно плоскости горизонта.
Для управления по азимутальной оси 11 передающей антенны ретранслятор содержит блок 12 азимутальной оси передающей антенны, а для управления по угломестной оси 13 передающей антенны - блок 14 угломестной оси передающей антенны.
В состав блоков 7 и 9 приемной антенны и блоков 12 и 14 передающей антенны входят датчики углов с устройствами обработки сигналов, а также приводы, обеспечивающие повороты осей.
Ретранслятор содержит также вычислительное устройство 15, предназначенное для управления приемной антенной 1 и передающей антенной 3 и соединенное с блоком 5, датчиком 10 угла, а также с блоками 7, 9, 12 и 14.
Приемная антенна 1 ретранслятора предназначена для усиления принимаемого радиотелевизионного сигнала 16, приходящего от источника сигнала, а передающая антенна 3 - для усиления излучаемого радиотелевизионного сигнала 17, поступающего от ретранслятора на абонентскую станцию.
На фиг.2 изображены операции:
18 - приведение приемной и передающей антенн в начальное положение (Аз=0, УМ=0);
19 - стабилизация передающей антенны в начальном положении;
20 - стабилизация приемной антенны в начальном положении;
21 - измерение и введение в вычислительное устройство ΔГП1;
22 - разворот приемной антенны на Аз=90 и 180 градусов; измерение и введение в вычислительное устройство ΔГП2 и ΔГП3; определение ΔДУ0, ctgАз0, Аз0, sinАз0, ΔГПМ; определение количества позиций по УМ, значений Азв их включения;
23 - стабилизация приемной антенны при Аз=90 и 180 градусов;
24 - разворот приемной антенны в положение (Аз=0, УМ=УМпи);
25 - стабилизация приемной антенны в положении (Аз=0, УМ=УМпи);
26 - разворот приемной антенны по азимуту с изменением угла места для захвата сигнала;
27 - поиск источника сигнала;
28 - точное наведение приемной антенны;
29 - уточнение положения источника сигнала;
30 - разворот приемной антенны по азимуту на абонентскую станцию;
31 - разворот приемной антенны по азимуту на 180 градусов;
32 - наведение передающей антенны по скорректированным азимуту и углу места на абонентскую станцию;
33 - разворот приемной антенны по азимуту в положение (Аз=Азпи, УМ=УМпи);
34 - точное наведение приемной антенны на источник сигнала.
В перечне операций, приведенных на фиг.2, использованы обозначения:
Аз - азимут;
УМ - угол места;
ΔГП1, ΔГП2, ΔГП3 - погрешность ретранслятора относительно плоскости горизонта (погрешность негоризонтальности);
ΔДУ0 - систематическая ошибка (уход нуля) датчика угла при отсутствии входного сигнала;
ΔГПМ - максимальная величина погрешности ΔГП при изменении азимута, т.е. амплитуда функции ΔГП=f(Аз);
Аз0 - фазовый сдвиг нуля функции ΔГП=f(Аз) относительно Аз=0;
Азв - азимут, соответствующий изменению угла места (включению позиции по углу места) приемной антенны при ее азимутальном развороте;
УМпи - программный угол места источника сигнала;
Азпи - программный азимут источника сигнала.
На фиг.2 показаны штатные операции наведения приемной и передающей антенн ретранслятора, а также дополнительные операции, использование которых позволило обеспечить получение указанного технического результата.
Блок-схема отражает последовательность операций и их взаимосвязь.
Ввод ретранслятора в эксплуатацию включает три этапа:
- начальная выставка, предусматривающая механические операции;
- наведение приемной антенны на источник сигнала и передающей антенны на абонентскую станцию;
- штатную работу ретранслятора.
Предлагаемое изобретение относится ко второму этапу и предусматривает, как отмечалось, введение дополнительных операций, а также использование информации от датчика угла, устанавливаемого на ретранслятор.
Предложенный способ наведения передающей антенны ретранслятора на абонентскую станцию реализуется следующим образом.
После подачи на ретранслятор питания по программе вычислительного устройства 15 (фиг.1) осуществляют штатные операции (фиг.2): 18 - приведение приемной и передающей антенн в начальное положение (Аз=0, УМ=0), 19 - стабилизация передающей антенны в начальном положении, 20 - стабилизация приемной антенны в начальном положении.
Управление антеннами осуществляют с помощью вычислительного устройства 15 (фиг.1).
Для программного разворота по азимуту приемной антенны 1 (фиг.1) по сигналам вычислительного устройства 15 используют привод, размещенный в блоке 7 азимутальной оси приемной антенны. Разворот производят вокруг азимутальной оси 6.
С помощью привода, размещенного в блоке 9 угломестной оси приемной антенны, осуществляют разворот вокруг угломестной оси 8. Развороты передающей антенны 3 производят с помощью привода, размещенного в блоке 12 азимутальной оси передающей антенны, вокруг азимутальной оси 11, а также привода, размещенного в блоке 14 угломестной оси передающей антенны, вокруг угломестной оси 13.
Скорость разворота рассматриваемых антенн составляет несколько градусов в секунду. Время стабилизации антенны определяется динамическими характеристиками контура управления. Минимальное требуемое время не превышает 1 секунды.
При стабилизации приемной антенны в начальном положении производят дополнительную операцию 21 - измерение погрешности негоризонтальности ΔГП1 (фиг.2). Измерение осуществляют с помощью датчика 10 угла (фиг.1). Ось чувствительности датчика 10 угла при изготовлении ретранслятора привязывается к системе координат ретранслятора. Для рассматриваемого примера ось чувствительности датчика 10 угла параллельна угломестной оси приемной антенны. Измеренную погрешность негоризонтальности вводят в вычислительное устройство 15.
Затем с помощью блока 7 и вычислительного устройства 15 (фиг.1) проводят дополнительную операцию 22 - разворот приемной антенны по азимуту последовательно на углы 90 и 180 градусов (фиг.2). В каждом из этих двух положений осуществляют штатную операцию 23 - стабилизацию приемной антенны (фиг.2)
В первом положении (Аз=90 градусов) с помощью датчика 10 угла и вычислительного устройства 15 (фиг.1) проводят измерение погрешности ΔГП2. Во втором положении (Аз=180 градусов) проводят измерение ΔГП3.
В этом же положении осуществляют определение ΔДУ0, ctgАз0, Аз0, sinАз0, ΔГПМ, а также определение количества позиций по УМ, значений Азв их включения.
Измерение погрешности негоризонтальности ретранслятора (ΔГП1, ΔГП2, ΔГП3) и определение вышеуказанных параметров позволяет, во-первых, отказаться от операции начальной выставки посадочной плоскости ретранслятора параллельно плоскости горизонта, во-вторых, за счет учета погрешности негоризонтальности существенно упростить операцию азимутального разворота приемной антенны для захвата сигнала.
В общем случае угол разворота приемной антенны до захвата сигнала может достигать 360 градусов. Введение этого разворота позволяет отказаться от привязки азимутальной измерительной системы ретранслятора к меридиану и от дополнительной аппаратуры (магнитный компас, гирокомпас, радиокомпас), которая используется для начального определения меридиана. Таким образом, предлагаемое изобретение позволяет отказаться от операции начальной выставки ретранслятора как по углу места, так и по азимуту.
В предложенном изобретении в качестве физически реализуемого азимутального базового направления предлагается использование направления оптической оси приемной антенны на источник сигнала (наземный или КА). При этом направление меридиана, которое используется в программе наведения передающей антенны, находят расчетным путем. Угол Ψи между меридианом и направлением на источник сигнала и угол Ψс между меридианом и направлением на абонентскую станцию находят по известным координатам (широте и долготе) источника сигнала, абонентской станции и ретранслятора. Если источником сигнала является КА, то берут координаты подспутниковой точки - пересечения поверхности Земли и отрезка прямой линии между центром Земли и КА.
При наведении приемной антенны на источник сигнала определяют азимутальный угол Ази. Требуемый для программного азимутального наведения передающей антенны на абонентскую станцию угол Азс находят из выражения

Требуемые параметры ΔДУ0, ctgАз0, Аз0, sinАз0, ΔГПМ определяют следующим образом.
Как известно, величина угла между двумя пересекающимися плоскостями пропорциональна синусу угла отклонения секущей плоскости от плоскости, перпендикулярной линии пересечения плоскостей.
Зависимость угла (погрешности) посадочной плоскости ретранслятора относительно горизонтальной плоскости от азимута определяется с помощью выражения

Для определения трех неизвестных величин ΔГПМ, Аз0, ΔДуо должно быть произведено не менее трех измерений при различных значениях азимута. При этом чем больше разность измеряемых величин ΔГП, тем меньше влияние ошибок проводимых измерений.
В рассматриваемом примере величина ΔГПМ порядка 20 угловых минут, а величина ΔДуо - порядка 2 угловых минут.
Увеличение количества измерений позволяет повысить точность определения погрешности ΔГП. При этом существенно усложняется обработка результатов данных измерений.
Поскольку величина ошибки при определении негоризонтальности посадочной плоскости ретранслятора существенно меньше других погрешностей, целесообразно использовать простейшую реализацию данного метода.
Предлагается измерения производить в трех точках Аз=0,90 и 180 градусов. Поворот приемной антенны проводится в положительном направлении (против часовой стрелки).
Выбранные точки позволяют не только обеспечить достаточно высокую точность измерений, но и упростить решение задачи нахождения величин, указанных в выражении (2).
По результатам трех измерений ΔГП
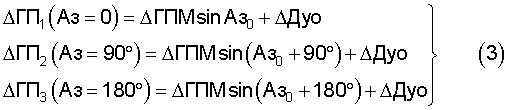
находят:


В память вычислительного устройства 15 вводятся таблицы ctgα и sinα. Поскольку требуется относительно невысокая точность определения ΔГП то достаточно использовать порядка 50 значений углов α (от 0 до 90 градусов).
Для найденного из выражения (4) ctgАз0 в вычислительном устройстве 15 определяют угол α=Аз0 и sinАз0. Затем из выражений (2) находят величину ΔГПМ

Время каждого из трех измерений ΔГП определяется требуемым временем стабилизации приемной антенны в данном положении и требуемым временем измерения с помощью датчика угла. Реально это время не превышает 1 секунду.
Для дискретного разворота приемной антенны 1 по азимуту и углу места при поиске сигнала на этапе изготовления ретранслятора определяют и вводят в программу вычислительного устройства величину шага. При этом исходят из ширины диаграммы направленности приемной антенны, ошибки ее наведения и выбранного коэффициента запаса. Под шагом понимается угол между двумя соседними дискретными положениями оптической оси приемной антенны.
Для рассматриваемого примера остронаправленной приемной антенны 1 с шириной диаграммы направленности ±15 угловых минут ошибка наведения обычно близка к уровню ±0,1φДН, т.е. ±3 угловые минуты. Принимая величину ошибки наведения 3-4 угловых минуты и запас 2-3 угловые минуты, вводят суммарную ошибку наведения (с учетом запаса) ΔΣ, равную 6 угловым минутам.
Величину шага по азимуту φш получают из выражения

Для рассматриваемого примера шаг φш равен 18 угловым минутам. Количество шагов по азимуту при угле 360 градусов составляет 1200.
Время нахождения антенны в каждом положении, заданное программой, определяется динамической характеристикой канала измерения сигнала и реально не превышает 0,1 секунды. Таким образом, время поиска сигнала (при полном обороте) для рассмотренного примера составляет около 120 секунд.
Количество шагов по углу места при поиске сигнала обычно в радиостанциях существенно меньше, поскольку точность выставки относительно горизонтальной плоскости значительно выше, чем относительно азимутальной базы (меридиана).
В предложенном изобретении операция начального программного наведения исключается.
Существенно, что благодаря введению поправки по углу места значительно сокращается время поиска сигнала. Как показывает анализ, практически поиск сигнала проводится не более чем за один оборот. При нескомпенсированной погрешности по углу места может потребоваться два и более оборотов.
После нахождения параметров ΔГПМ, Аз0 и ΔДуо определяют количество позиций по углу места и значения Азв их включения при азимутальном поиске сигнала.
Проводят проверку возможности использования однопозиционного (однострочного) по углу места азимутального разворота приемной антенны.
Производят сравнение суммы

с шириной диаграммы направленности приемной антенны.
Если выполняется условие

то используют однострочный азимутальный разворот приемной антенны.
При этом угол места приемной антенны выбирают равным

Для рассматриваемого примера φДН и Σ1 соответственно равны 30 и 52 угловым минутам. Следовательно, условие (9) не выполняется.
Если условие (9) не выполняется, то осуществляют проверку возможности использования двухпозиционного по углу места азимутального разворота приемной антенны.
Проводят сравнение суммы

с шириной диаграммы направленности прямой антенны.
Если выполняется условие

то используют двухпозиционный по углу места разворот по азимуту.
При этом выбирают угол места приемной антенны для двух позиций, соответственно:


Углы включения позиций в соответствии с выражением (2) находятся из условия

Учитывая, что включение первой позиции производят при

из условия (15) находят соответственно углы включения второй позиции Азв2 и повторного включения первой позиции Азв1П:




Для рассматриваемого примера Σ2 равна 32 минутам. Следовательно, условие (12) не выполняется.
Если условие (12) не выполняется, то проводят проверку возможности использования трехпозиционного по углу места азимутального разворота приемной антенны.
Для рассматриваемых ретрансляторов с остронаправленными антеннами при относительно небольших погрешностях наведения и негоризонтальности обычно при поиске сигнала используется азимутальный разворот приемной антенны, однопозиционный или двухпозиционный по углу места. Трехпозиционный по углу места азимутальный разворот может встретиться в редких случаях.
На фиг.3 дан пример трехпозиционного по углу места азимутального разворота приемной антенны.
Центры позиций по азимуту находят:
- для первой, третьей и повторной первой позиции - как максимумы функций ΔГП, что соответствует углам (90°-Азо), (270°-Азо) и (450°-Азо);
- для второй и повторной второй позиции - как значения ΔГП=ΔДуо, что соответствует углам (180°-Азо) и (360°-Азо).
Проверку реализуемости данной операции проводят в два этапа.
На фиг.4 приведен пример определения границ позиций при трехпозиционном по углу места азимутальном развороте приемной антенны.
На первом этапе для второй позиции с центром по азимуту (180°-Азо) находят величину

которая соответствует максимально допустимому значению ΔГП для второй позиции. Затем определяют величину

соответствующую нижней допустимой границе диаграммы направленности для первой позиции.
Далее находят верхнюю допустимую границу диаграммы направленности для первой позиции

и определяют величину запаса

Для обеспечения реализации трехпозиционного по углу места азимутального разворота должно выполняться условие

Величина Δ4 может существенно превышать предельный запас, который равен ΔΣ.
Если 
то производят второй этап операции, на котором запас распределяется одинаково для верхней и нижней границ первой и второй позиций.
Находят величину поправки

вместо величины Δ1 и Δ2 соответственно находят


В результате получают:


Определяют угол места приемной антенны для трех позиций:
для второй позиции 
для первой позиции 
где в соответствии с выражением (30)

для третьей позиции 
Определяют угол включения позиций.
Включение первой позиции производят при

Углы включения следующих позиций находят с помощью выражения (2).
Из условия

определяют

Из таблицы находят α и определяют угол включения второй позиции

Угол включения третьей позиции Азв3 находят как угол, симметричный углу Азв2 относительно угла (180°-Аз0):

Аналогично определяют углы Азвп2 - повторного включения второй позиции и Азвп1 - повторного включения первой позиции:


Для рассматриваемого примера (ΔГПМ=20 угловых минут, ΔДуо=2 угловые минуты, Аз0=30 градусов) на первом этапе находим: Δ1=11 угловых минут, Δ2=5 угловых минут, Δ3=35 угловых минут, Δ4=13 угловых минут.
На втором этапе получаем: ΔП=2,3 угловых минуты, Δ1к=8,7 угловых минуты, Δ2к=0,4 угловых минуты, Δ3к=30,4 угловых минуты, Δ4к=8,4 угловых минуты.
По результатам второго этапа находим:
УМП1=УМПИ+15,4 угловых минут,
УМП2=УМПИ+2 угловые минуты,
УМП3=УМПИ-11,4 угловых минут,
α=20 градусов,
Азв2=130 градусов,
Азв3=170 градусов,
Азвп2=310 градусов,
Азвп1=350 градусов.
После операций 22 и 23 (фиг.2) последовательно проводят штатные операции (фиг.2): 24 (разворот приемной антенны в положение Аз=0, УМ=УМПИ) и 25 (стабилизация приемной антенны в положении Аз=0, УМ=УМПИ). Управление приемной антенной 1 (фиг.1) осуществляют с помощью вычислительного устройства 15 и блоков 7 и 9.
Затем производят дополнительную операцию (фиг.2) 26 - разворот приемной антенны по азимуту с изменением угла места для захвата сигнала.
Управление движением по азимуту и углу места осуществляют по программе вычислительного устройства 15 (фиг.1) с помощью блоков 7 и 9. При этом изменение угла места проводят с использованием параметров, найденных при выполнении операции 22 (фиг.2).
Принимаемый радиотелевизионный сигнал 16 (фиг.1) от источника сигнала обнаруживают с помощью приемной антенны 1. В СВЧ-блоке 2 осуществляют преобразование СВЧ-сигнала: фильтрацию, усиление, изменение частоты. После преобразования сигнал подают на блок 5 наведения приемной антенны. С помощью этого сигнала реализуют контур наведения приемной антенны по принимаемому сигналу.
Захват сигнала фиксируют с помощью блока 5 по измеряемому уровню принимаемого сигнала, который должен составлять 0,7 от максимальной величины сигнала. Это соответствует границам диаграммы направленности приемной антенны (уровню потерь по мощности 3 дБ). Превышение данного уровня могут зафиксировать в одном или двух соседних положениях приемной антенны по азимуту.
После захвата сигнала осуществляют штатную операцию (фиг.2) 27 - поиск источника сигнала. В этом режиме перемещение приемной антенны 1 (фиг.1) по азимуту и углу места проводят с относительно небольшим шагом (0,1-0,4)φДН. Найденные уточненные координаты (азимут, угол места) источника сигнала вводят в вычислительное устройство 15.
Затем осуществляют штатную операцию (фиг.2) 28 - точное наведение приемной антенны на источник сигнала по азимуту и углу места с помощью, например, известного метода экстремального наведения. Время данной операции зависит от требуемой точности наведения и может составлять от нескольких единиц до нескольких десятков секунд.
Операции 27 и 28 (фиг.2) осуществляют с помощью вычислительного устройства 15 и блоков 5, 7 и 9 (фиг.1).
В режиме точного наведения приемной антенны 1 на источник сигнала проводят дополнительную операцию (фиг.2) 29 - уточнение положения источника сигнала, для чего поочередно увеличивают и уменьшают азимут на одинаковые углы, при этом для обоих углов значения принимаемого сигнала составляют от семидесяти пяти до восьмидесяти пяти процентов от значения сигнала, соответствующего режиму точного наведения. Перевод приемной антенны в каждое из двух указанных положений и стабилизацию ее в этих положениях осуществляют с помощью системы управления антенны, которая в данном случае работает как система программного управления. Управление приемной антенной 1 (фиг.1) производят с помощью вычислительного устройства 15 и блоков 5, 7 и 9. Режим работы при этом аналогичен режиму работы при экстремальном наведении. Разница состоит в размере изменения программного угла. В данном случае он соответствует (0,35-0,45)φДН, а в экстремальном методе - (0,1-0,2)φДН.
Время нахождения антенны в каждом из двух указанных положений подобно экстремальному методу, должно быть от 0,1 до единиц секунд.
Полученные после стабилизации антенны в этих положениях оба значения сигнала вводят в вычислительное устройство 15 и используют для уточнения положения источника сигнала по азимуту. Поправку на угол находят как произведение разности двух значений сигнала и коэффициента, определенного и введенного в программу вычислительного устройства 15 при изготовлении ретранслятора. Уточненное положение источника сигнала вводят в программу наведения передающей антенны 3 на абонентскую станцию по азимуту. Азимут абонентской станции находят из формулы (1). При использовании данной операции точность определения источника сигнала повышается благодаря резкому уменьшению (в 4-5 раз) составляющей погрешности из-за нестабильности измеряемого сигнала. Это обусловлено выбором рабочей точки на крутом участке диаграммы направленности приемной антенны.
Для рассмотренного примера ретранслятора данная составляющая уменьшается с 2,5 до 0,5 угловых минут. Суммарная погрешность программного наведения передающей антенны 3 по азимуту при этом уменьшается на 10 процентов (с 5 до 4,5 угловых минут).
Затем приемную антенну 1 разворачивают по азимуту на угол, соответствующий азимуту абонентской станции (дополнительная операция 30, фиг.2). Угол места приемной антенны 1 (фиг.1) при этом не меняется.
С помощью датчика 10 угла измеряют и вводят в вычислительное устройство 15 погрешность ретранслятора относительно плоскости горизонта.
После этого проводят дополнительную операцию 31 (фиг.2) - приемную антенну 1 (фиг.1) разворачивают по азимуту на 180 градусов, измеряют с помощью датчика 10 угла и вводят в вычислительное устройство 15 погрешность ретранслятора относительно плоскости горизонта. Данные измерения используют для определения уточненной величины погрешности ретранслятора относительно плоскости горизонта.
По результатам этих измерений определяют данную погрешность как полуразность полученных значений и вводят в программу наведения передающей антенны 3 на абонентскую станцию по углу места.
Ошибка уменьшается из-за компенсации систематической погрешности (ухода нуля) датчика 10 угла, а также благодаря использованию непосредственных измерений, а не результатов расчета с помощью формулы (2).
Кроме того, проведение этих двух операций (30 и 31, фиг.2) позволяет упростить операцию 22 (фиг.2) благодаря минимизации числа измерений.
Для рассматриваемого примера ретранслятора данная составляющая погрешности уменьшается с 2 до 0,7 угловых минут. Суммарная ошибка программного наведения передающей антенны 3 (фиг.1) по углу места при этом уменьшается на 15 процентов (с 4 до 3,4 угловых минут).
Если не учитывать также результаты операций 21 и 20 (фиг.2) по измерению ошибок негоризонтальности ретранслятора ΔГП1, ΔГП2, ΔГП3 и принять ошибку горизонтирования ретранслятора (без проведения дополнительных операций) 3,5 угловых минуты, то уменьшение указанной суммарной ошибки составит 30 процентов.
После этого проводят дополнительную операцию 32 (фиг.2) - наводят передающую антенну 3 (фиг.1) по рассчитанным азимуту и углу места на абонентскую станцию, причем при наведении по азимуту используют уточненное положение источника сигнала, а при наведении по углу места уточненную величину погрешности ретранслятора относительно плоскости горизонта.
Одновременно с этой операцией проводят последовательно штатные операции (фиг.2): 33 - осуществляют разворот приемной антенны 1 (фиг.1) по азимуту на уточненный по результатам измерений угол источника сигнала; 34 - точное наведение приемной антенны 1 на источник сигнала, в этом режиме осуществляют программное наведение с периодической коррекцией с помощью метода экстремального наведения.
Приведенное описание предлагаемого способа позволяет сделать следующее заключение.
Введенные в данном способе дополнительные операции позволяют повысить точность наведения передающей антенны ретранслятора на абонентскую станцию на 10-30 процентов, что приводит к повышению скорости передаваемой информации и улучшению помеховой обстановки.
Реализация предлагаемого изобретения позволяет отказаться от операции начальной выставки ретранслятора по углу места и по азимуту и тем самым существенно уменьшить трудоемкость при эксплуатации ретранслятора, а также отказаться от использования дорогостоящей дополнительной аппаратуры, которая должна применяться при построении измерительных базовых плоскостей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА | 2007 |
|
RU2328824C1 |
| СПОСОБ НАВЕДЕНИЯ АНТЕНН РЕТРАНСЛЯТОРА | 2006 |
|
RU2368076C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2008 |
|
RU2368077C1 |
| СПОСОБ ПЕРЕДАЧИ СИГНАЛА СВЧ | 2008 |
|
RU2374764C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОТЕЛЕВИЗИОННОГО СИГНАЛА | 2011 |
|
RU2479923C2 |
| СПОСОБ ПЕРЕДАЧИ РАДИОТЕЛЕВИЗИОННОГО СИГНАЛА | 2006 |
|
RU2308154C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2009 |
|
RU2409893C2 |
| УСТРОЙСТВО СВЧ-СВЯЗИ | 2005 |
|
RU2309542C2 |
| СИСТЕМА И СПОСОБ СЛЕЖЕНИЯ АНТЕННОЙ СИСТЕМЫ ЗЕМНОЙ СТАНЦИИ ПОДВИЖНОЙ СПУТНИКОВОЙ СВЯЗИ | 2023 |
|
RU2821956C1 |
| АБОНЕНТСКАЯ ЗЕМНАЯ СТАНЦИЯ ПОДВИЖНОЙ СПУТНИКОВОЙ СВЯЗИ | 2023 |
|
RU2816866C1 |


Изобретение относится к системам связи и предназначено для ретрансляции радиотелевизионных сигналов. Технический результат заключается в повышении точности наведения передающей антенны ретранслятора, в исключении использования дополнительной аппаратуры для наведения передающей антенны, а также в упрощении эксплуатации. Сущность изобретения состоит в том, что в способе наведения передающей антенны ретранслятора на абонентскую станцию, при котором производят наведение приемной антенны ретранслятора на источник сигнала путем ее разворота по азимуту и углу места до захвата сигнала, а затем точное наведение приемной антенны с использованием программного наведения с коррекцией по принимаемому сигналу, а также производят наведение передающей антенны ретранслятора на абонентскую станцию на рассчитанные азимут и угол места, перед наведением приемной антенны на источник сигнала проводят разворот этой антенны по азимуту на угол до ста восьмидесяти градусов и для не менее трех различных азимутальных углов измеряют значения погрешности ретранслятора относительно плоскости горизонта с помощью датчика угла, установленного на азимутальной оси приемной антенны. После этого производят разворот по азимуту приемной антенны до захвата сигнала, при этом одновременно в соответствии с найденными параметрами меняют угол места приемной антенны, затем в режиме точного наведения приемной антенны на источник сигнала поочередно увеличивают и уменьшают азимут на одинаковые углы, полученные в этих положениях оба значения сигнала используют для уточнения положения источника сигнала по азимуту. Затем приемную антенну разворачивают по азимуту на угол, соответствующий азимуту абонентской станции, а затем приемную антенну разворачивают по азимуту на сто восемьдесят градусов, в обоих положениях измеряют с помощью датчика угла погрешность ретранслятора относительно плоскости горизонта. После этого передающую антенну наводят по рассчитанным азимуту и углу места на абонентскую станцию, причем при наведении по азимуту используют уточненное положение источника сигнала, а при наведении по углу места уточненную величину погрешности ретранслятора относительно плоскости горизонта. 4 ил.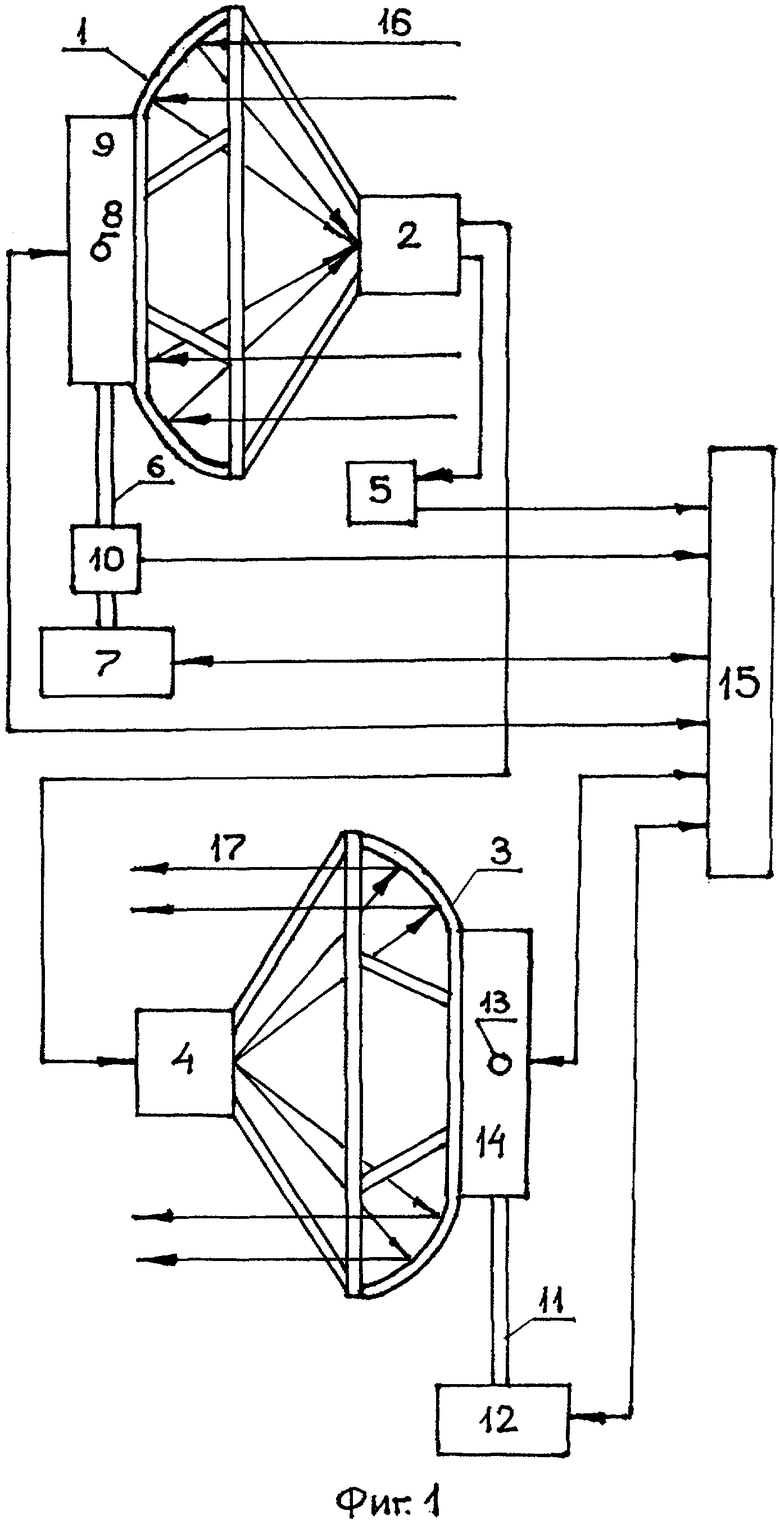
Способ наведения передающей антенны ретранслятора на абонентскую станцию, при котором производят наведение приемной антенны ретранслятора на источник сигнала, причем при операции наведения проводят разворот приемной антенны по азимуту и углу места до захвата сигнала, а затем точное наведение приемной антенны по азимуту и углу места с использованием программного наведения с коррекцией по принимаемому сигналу, а также производят наведение передающей антенны ретранслятора на абонентскую станцию на рассчитанные азимут и угол места, отличающийся тем, что перед наведением приемной антенны на источник сигнала проводят разворот этой антенны по азимуту на угол до ста восьмидесяти градусов и для не менее трех различных азимутальных углов измеряют значения погрешности ретранслятора относительно плоскости горизонта с помощью датчика угла, установленного на азимутальной оси приемной антенны, измеренные значения погрешности используют для определения параметров движения приемной антенны по углу места, после этого производят разворот по азимуту приемной антенны до захвата сигнала, при этом одновременно в соответствии с найденными параметрами меняют угол места приемной антенны, затем в режиме точного наведения приемной антенны на источник сигнала поочередно увеличивают и уменьшают азимут на одинаковые углы, при этом для обоих углов значения принимаемого сигнала составляют от семидесяти пяти до восьмидесяти пяти процентов от значения сигнала, соответствующего режиму точного наведения, полученные в этих положениях оба значения сигнала используют для уточнения положения источника сигнала по азимуту, полученное уточненное положение источника сигнала учитывают при наведении передающей антенны на абонентскую станцию по азимуту, после этого приемную антенну разворачивают по азимуту на угол, соответствующий азимуту абонентской станции, а затем приемную антенну разворачивают по азимуту на сто восемьдесят градусов, в обоих положениях измеряют с помощью датчика угла погрешность ретранслятора относительно плоскости горизонта, данные измерения используют для определения уточненной величины погрешности ретранслятора относительно плоскости горизонта, которую учитывают при наведении передающей антенны на абонентскую станцию по углу места, после чего передающую антенну наводят по рассчитанным азимуту и углу места на абонентскую станцию, причем при наведении по азимуту используют уточненное положение источника сигнала, а при наведении по углу места уточненную величину погрешности ретранслятора относительно плоскости горизонта.
| ФРОЛОВ О.П | |||
| Антенны для земных станций спутниковой связи | |||
| - М.: Радио и связь, 2000, с.215-219 | |||
| СПОСОБ ОСУЩЕСТВЛЕНИЯ КОСМИЧЕСКОЙ СВЯЗИ И СИСТЕМА КОСМИЧЕСКОЙ СВЯЗИ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206958C2 |
| US 5570097 А, 29.10.1996. | |||

