Заявляемое техническое решение относится к медицинской технике и может быть использовано в аппаратах брахитерапии, а также в системах отсчета движения тросовых элементов.
Важным параметром при проведении контактной лучевой терапии (брахитерапии) является точное расположение источника радиоактивного излучения в теле пациента, от которого зависит качество лечения и безопасность всей процедуры. Для точного позиционирования источника излучения необходимо применять методы или устройства, способные определять позицию источника, который перемещается посредством гибкого стержня, например, троса, или кабеля, по длине выдвинутого гибкого стержня, что позволяет специалисту точно настраивать процесс процедуры облучения. Кроме того, помимо определения положения источника излучения, определение положения имитатора источника излучения в процессе подготовки процедуры позволяет более точно позиционировать в дальнейшем источник излучения и уменьшить время его пребывания вне защитного хранилища аппарата брахитерапии за счет высокой скорости перемещения источника. Также подобные устройства отсчета позиции элемента, перемещаемого с помощью гибкого стержня, могут применяться, например, в строительстве или на производстве для точного перемещения объектов в заданное положение. Таким образом, создание устройств отсчета позиции различных элементов имеет высокую актуальность для развития различных областей науки и техники.
Из уровня техники известно устройство для лечения, включающее блок загрузки, снабженный проводом с радиоактивным источником, проводом с неактивным источником, выходным портом, через который проходят указанный провод источника излучения и провод с неактивным источником, первое кодирующее устройство для измерения расстояния, пройденного проводом с неактивным источником, второе кодирующее устройство для измерения расстояния, на которое должен быть перемещен провод с радиоактивным источником, и электронный контроллер, подключенный к обоим кодирующим устройствам. Патент США № 5800333A, МПК А61М 36/04, А61Н 5/10, А61Н 5/00, опубликован 01.09.1998.
Недостатком представленного технического решения является использование кодирующего устройства для отсчета положения источника непосредственно в связи с приводными роликами, что не обеспечивает высокую точность определения расстояния, пройденного источником, так как не исключает возможное проскальзывание приводного ролика при движении элемента, или движении ролика при столкновении элемента с препятствием, что способствует возникновению погрешности в определении расстояния, пройденного источником. Кроме того, отсутствие возможности перемещения приводных роликов относительно друг друга может приводить к усилению трения источника о поверхность роликов при его прохождении, что особенно важно при многократном использовании источника радиоактивного излучения, так как возникновение трения капсулы источника о поверхности роликов или неподвижные поверхности прижатого роликами канала, через который проходит источник, может привести к ее разрушению, что приведет к разгерметизации радиоактивного источника и возникновению радиационной аварии, облучению персонала сверх допустимых норм и существенным расходам для ликвидации её последствий.
Из уровня техники известно решение, выбранное в качестве ближайшего аналога, представляющее собой устройство для перемещения и позиционирования по меньшей мере одного держателя радиоактивного источника в трубке-аппликаторе, используемой в лучевой терапии, содержащее направляющую трубку, кабель, выполненный с возможностью продольного перемещения вдоль указанной направляющей трубки и указанной трубки-аппликатора между первым положением и вторым положением, и средство для перемещения кабеля вдоль направляющей трубки и трубки-аппликатора, включающее: первый ролик с приводом от двигателя, находящийся в тангенциальном контакте, со скольжением, с кабелем, средства для приведения во вращение первого ролика, и энкодер, снабженный вторым роликом, находящимся в тангенциальном контакте, без скольжения, с кабелем, при этом энкодер имеет средства обнаружения прерывания вращения второго ролика. Патент США № 4851694, МПК A61M 36/04, A61N 5/10, F16C 1/12, G01B 5/04, G21F 5/04, G21F 5/02, опубликован 25.07.1989.
Ближайший аналог предоставляет возможность перемещения энкодера по высоте относительно провода источника излучения и прижимного ролика для обеспечения необходимого давления на провод источника, однако данная возможность перемещения не автоматизирована, а должна осуществляться вручную, что может не обеспечивать правильного прилегания провода к ролику энкодера, таким образом внося погрешности в измерение расстояния. Кроме того, ручное регулирование высоты положения энкодера является неудобным и трудоемким процессом.
Задачей заявленного технического решения является создание устройства отсчета позиции элемента, обеспечивающего высокую точность измерений.
Технический результат заявляемого решения заключается в повышении точности отсчета позиции элемента, перемещаемого с помощью гибкого стержня.
Повышение точности отсчета позиции элемента, перемещаемого с помощью гибкого стержня, достигается, в частности обеспечением непрерывного контакта гибкого стержня и счетного ролика датчика углового положения, и прямолинейности движения гибкого стержня.
Заявленный технический результат достигается за счет того, что устройство отсчета позиции элемента, перемещаемого с помощью гибкого стержня, включает корпус с расположенным в нем датчиком углового положения, включающим вал и счетный ролик, выполненный с возможностью передачи крутящего момента валу, и прижимным роликом, выполненным с возможностью прижатия гибкого стержня к счетному ролику и подключенным к приводу перемещения прижимного ролика. Предпочтительно устройство отсчета позиции элемента включает датчик наличия элемента, расположенный в корпусе и подключенный к приводу перемещения прижимного ролика. Устройство отсчета позиции элемента может включать датчик определения положения прижимного ролика, расположенный в корпусе и подключенный к приводу перемещения прижимного ролика. Предпочтительно оси вращения прижимного и счетного роликов расположены в одной плоскости. Прижимной и счетный ролики предпочтительно выполнены с возможностью вращения вокруг соответствующих осей в обоих направлениях.
Под формулировкой «датчик углового положения» следует понимать датчик угла поворота, или энкодер.
В качестве элемента, перемещаемого посредством гибкого стержня, в аппаратах брахитерапии может быть использован источник радиоактивного излучения или его имитатор, то есть не излучающий элемент.
При использовании устройства по целевому назначению элемент, перемещаемый с помощью гибкого стержня, приводящегося в движение посредством специального привода, перемещается через устройство отсчета позиции элемента, находясь в контакте с счетным роликом датчика углового положения, и затем перемещается из устройства на определенное расстояние. Посредством движения гибкого стержня в контакте с счетным роликом обеспечивается его вращение и передача крутящего момента валу, который преобразует угол поворота вала в сигнал, используемый для определения длины выдвинутого гибкого стержня, и как следствие расстояния, на которое был перемещен элемент. Прижимной ролик выполнен с возможностью прижатия гибкого стержня к счетному ролику датчика углового положения, обеспечивая их непрерывный контакт. Привод перемещения прижимного ролика обеспечивает перемещение прижимного ролика от счетного ролика при перемещении через счетный ролик элемента, и перемещение прижимного ролика к счетному ролику для прижатия к нему гибкого стержня при отсутствии контакта элемента и счетного ролика.
Для перемещения элемента на заданное расстояние как в медицинской технике, в частности в аппаратах брахитерапии, так и в других отраслях, например, строительстве, при грузоподъемных работах или доставке грузов на определенное расстояние при проведении подземных работ, удобным является перемещение элемента с помощью гибкого стержня, например, троса, кабеля, провода различной толщины, или цепей. Отсчет позиции элемента, а именно длины выдвинутого гибкого стержня, определяется за счет физического контакта гибкого стержня и устройства определения позиции элемента, что необходимо, для использования заявляемого устройства по целевому назначению.
Устройство отсчета позиции элемента включает корпус для размещения в нем составляющих устройства и обеспечения целостности конструкции. При этом, наличие корпуса обеспечивает защиту внутренних компонентов устройства, а также элемента, перемещаемого с помощью гибкого стержня, от возможных внешних механических воздействий при аварийных ситуациях, от различных ударов, столкновений и т.д., что также снижает механическое воздействие на датчик углового положения, предотвращая его поломку и выход из строя, а также снижение точности отсчета позиции элемента, тем самым обеспечивая точность отсчета позиции элемента. Кроме того, наличие корпуса обеспечивает защиту датчика углового положения от попадания влаги и пыли в устройство, что также сохраняет работоспособное состояние его электронных компонентов при попадании влаги или наэлектризованной пыли. Таким образом, наличие корпуса обеспечивает точность отсчета позиции элемента на протяжении всего срока эксплуатации устройства, а также дополнительно увеличивает долговечность и надежность устройства.
Для обеспечения отсчета позиции элемента и использования устройства по целевому назначению заявляемое решение включает датчик углового положения, который включает вал, необходимый для восприятия крутящего момента с последующим преобразования угла его поворота в электрический сигнал, посредством которого определяется длина выдвинутого гибкого стержня, и как следствие расстояние, на которое перемещен элемент. Датчики углового положения обладают высокой разрешающей способность и точностью измерений угла поворота, что обеспечивает высокую точность отсчета позиции элемента, а также не требует использования дополнительных средств контроля положения элемента, например оптических, рентгеноскопических или визуального наблюдения. Кроме того, монтаж и установка таких датчиков отличается простотой. При этом, датчик углового положения включает также счетный ролик, выполненный с возможностью передачи крутящего момента валу для предотвращения трения элемента и гибкого стержня непосредственно о вал датчика, что может нарушить его работу и снизить точность определения позиции элемента, тем самым наличие счетного ролика повышает точность отсчета позиции элемента. Кроме того, счетный ролик датчика углового положения может быть использован различного диаметра и толщины в зависимости от используемого гибкого стержня, что дополнительно повышает универсальность устройства и расширяет области его применения.
В корпусе заявляемого решения также расположен прижимной ролик, выполненный с возможностью прижатия гибкого стержня к счетному ролику, обеспечивающий непрерывный контакт гибкого стержня и счетного ролика датчика углового положения, благодаря чему обеспечивается высокая точность отсчета позиции элемента, так как при возможном отсутствии контакта гибкого стержня и счетного ролика увеличивается погрешность определения позиции элемента в связи с отсутствием непрерывного вращения счетного ролика датчика углового положения, при продолжающемся движении гибкого стержня. Подключение прижимного ролику к приводу перемещения прижимного ролика позволяет перемещать прижимной ролик от счетного ролика, создавая свободное пространство для беспрепятственного перемещения элемента, что обеспечивает высокую точность отсчета позиции элемента, так как при отсутствии возможности подобного перемещения прижимного ролика при перемещении элемента будет возникать трение, препятствующее прохождению элемента между роликами, что может привести к нарушению прямолинейного движения гибкого стержня, и возникновению погрешности отсчета позиции элемента. Кроме того, после прохождения элемента посредством привода прижимной ролик перемещается к счетному ролику, прижимая к нему гибкий стержень для обеспечения их непрерывного контакта при движении гибкого стержня, благодаря чему обеспечивается прямолинейность движения гибкого стержня, и как следствие высокая точность отсчета позиции элемента, и снижается погрешность определения длины выдвинутого гибкого стержня, и как следствие отсчета позиции элемента в связи с непрерывным вращением счетного ролика датчика углового положения, при продолжающемся движении гибкого стержня.
В предпочтительном варианте исполнения заявляемое решение включает датчик наличия элемента, расположенный в корпусе и подключенный к приводу перемещения прижимного ролика, который предоставляет возможность автоматизированного определения момента для перемещения прижимного ролика при перемещении элемента через устройство для свободного его прохождения, что дополнительно повышает точность отсчета позиции элемента, так как отсутствует необходимость в визуальном определении момента перемещения ролика оператором устройства, что также усложняется наличием корпуса, что может вносить погрешность при определении позиции элемента, так как непрерывный контакт гибкого стержня и счетного ролика не будет обеспечен вовремя. Кроме того, подключение датчика наличия элемента к приводу перемещения прижимного ролика дополнительно повышает автономность процесса перемещения прижимного ролика при обнаружении элемента, что также дополнительно повышает точность отсчета позиции элемента, так как информация о моменте приведения прижимного ролика в движение передается от датчика наличия элемента за счет подключения приводу перемещения прижимного ролика, таким образом отсутствует необходимость в управлении перемещением прижимного ролика оператором, что дополнительно снижает вероятность несвоевременного возникновения контакта гибкого стержня и счетного ролика из-за «человеческого фактора», что может вносить погрешность при определении позиции элемента, так как непрерывный контакт гибкого стержня и счетного ролика не будет обеспечен вовремя. Расположение датчика наличия элемента в корпусе предохраняет его внешних воздействий, которые могут повлиять на точность его работы и определения момента перемещения прижимного ролика, таким образом дополнительно повышается точность отсчета позиции элемента. В предпочтительном варианте может быть использовано несколько датчиков наличия элемента, расположенных в корпусе по оси движения элемента, например до роликов и после. Первый датчик наличия элемента, расположенный до роликов, может именоваться как «датчик замедления» и при обнаружении перемещаемого элемента определять момент для перемещения прижимного ролика от счетного ролика и уменьшения скорости перемещения элемента, благодаря чему он беспрепятственно продвигается через устройство. В месте с тем в предпочтительном варианте устройство может включать второй датчик наличия элемента, именуемый как «контрольная точка» и расположенный после роликов, который позволяет определять момент для перемещения прижимного ролика к счетному ролику и увеличения скорости перемещения элемента.
В предпочтительном варианте устройство может включать датчик определения положения прижимного ролика, расположенный в корпусе и подключенный к приводу перемещения прижимного ролика, который позволяет определить положение прижимного ролика, а также за счет подключения к приводу перемещения прижимного ролика передать информацию о направлении его следующего перемещения от счетного ролика или к нему в зависимости от момента перемещения элемента посредством гибкого стержня через устройство, что дополнительно повышает точность отсчета позиции элемента, так как снижает вероятность перемещения прижимного ролика в неправильном направлении, например, вместо движения к счетному ролику от него, тем самым не успевая прижать гибкий стержень до начала отсчета позиции элемента, в результате чего возникнет погрешность измерения, либо вместо движения от счетного ролику к нему, усиливая давление на гибкий стержень, тем самым увеличивая трение его о счетный ролик и деформируя, тем самым внося погрешности в определение отсчета позиции элемента. Расположение датчика определения положения прижимного ролика в корпусе предохраняет его внешних воздействий, которые могут повлиять на точность его работы и определения положения и дальнейшего направления перемещения прижимного ролика, таким образом дополнительно повышается точность отсчета позиции элемента.
В предпочтительном варианте оси вращения прижимного и счетного роликов расположены в одной плоскости, что дополнительно увеличивает точность отсчета позиции элемента, так как при движении гибкого стержня происходит свободное беспрепятственное вращение роликов, тогда как при расположении осей вращения прижимного и счетного роликов в разных плоскостях, вращение одного из роликов при движении гибкого стержня будет затруднено, так как будет возникать дополнительное трение роликов о стержень, при расположении их осей вращения в разных плоскостях, что будет затруднять его движение и дополнительно снижать точность отсчета позиции элемента, несмотря на обеспечение непрерывного контакта. Таким образом, предпочтительное расположение осей вращения прижимного и счетного роликов в одной плоскости дополнительно увеличивает точность отсчета позиции элемента.
В предпочтительном варианте исполнения заявляемого решения прижимной и счетный ролики выполнены с возможностью вращения вокруг соответствующих осей в обоих направлениях для дополнительного снижения трения между гибким стержнем и роликами при возвращающем движении, что дополнительно повышает точность отсчета позиции элемента, так как позволяет дополнительно измерить длину гибкого стержня при возвращающем движении и сравнить расстояние, на которое был перемещен элемент в обе стороны, что также дает представление о возможном растяжении гибкого стержня. В противном случае при невозможности вращения роликов в одну из сторон их неподвижность будет увеличивать трение между гибким стержнем и роликами, что дополнительно может способствовать растяжению гибкого стержня и нарушению работы датчика углового положения, так как на счетный ролик, и как следствие его вал будут оказываться дополнительные напряжения снижающие точность его работы, таким образом, возможность вращения прижимного и счетного роликов вокруг соответствующих осей в обоих направлениях дополнительно повышает точность отсчета позиции элемента.
Далее заявляемое техническое решение поясняется с помощью фигур, на которых условно представлен один из предпочтительных вариантов исполнений устройства отсчета позиции элемента.
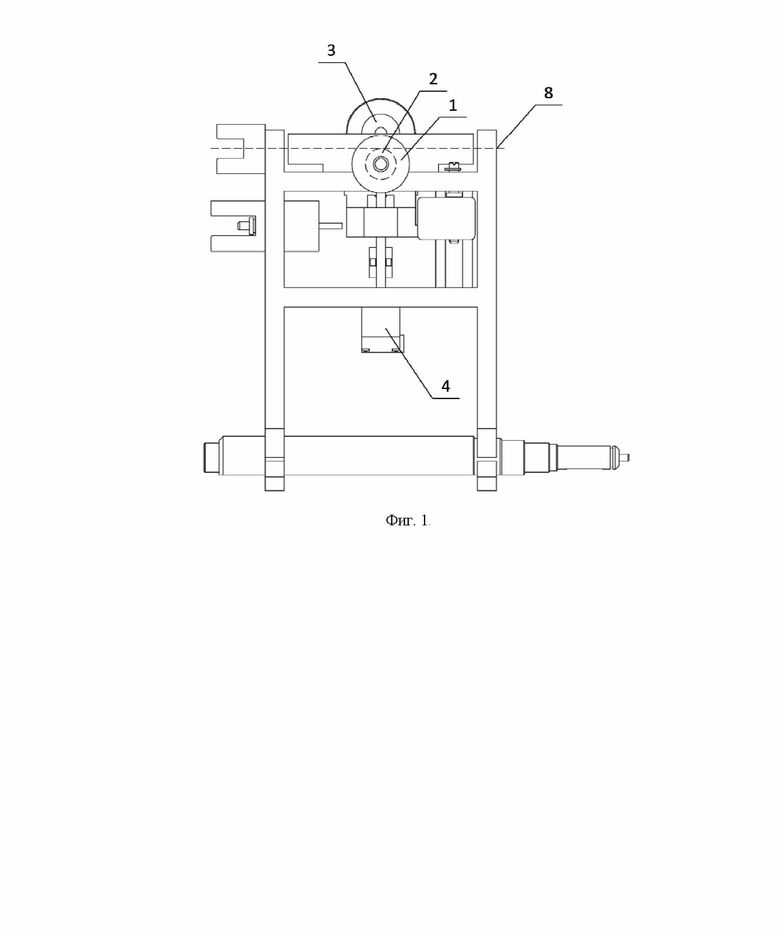
На фиг. 1 представлен общий виде с одной стороны устройства отсчета позиции элемента в составе узла выбора канала брахитерапевтического аппарата.
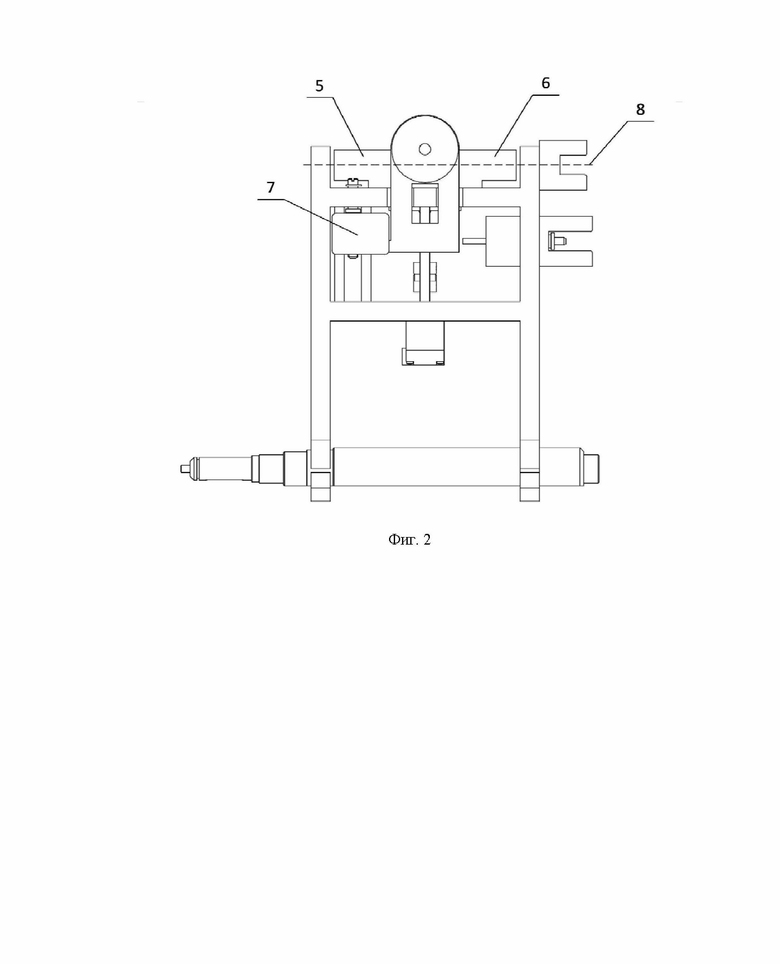
На фиг. 2 представлен общий с другой стороны устройства отсчета позиции элемента в составе узла выбора канала брахитерапевтического аппарата.
На фигурах цифрами обозначены:
- датчик (1) углового положения;
- проекция счетного ролика (2) датчика (1) углового положения;
- прижимной ролик (3);
- привод (4) перемещения прижимного ролика (3);
- место расположения первого датчика (5) наличия элемента;
- место расположения второго датчика (6) наличия элемента;
- место расположения датчика (7) определения положения прижимного ролика (3);
- ось (8), вдоль которой перемещается элемент, проходящий через устройство.
Далее со ссылками на фигуры описан один из предпочтительных вариантов исполнения заявляемого технического решения, расположенного в узле выбора канала брахитерапевтического аппарата.
Устройство отсчета позиции элемента, перемещаемого с помощью гибкого стержня, включает корпус с расположенным в нем датчиком (1) углового положения, включающим вал и счетный ролик (2), выполненный с возможностью передачи крутящего момента валу, и прижимным роликом (3), выполненным с возможностью прижатия гибкого стержня к счетному ролику (2) и подключенным к приводу (4) перемещения прижимного ролика (3). В предпочтительном варианте устройство отсчета позиции элемента включает первый датчик (5) наличия элемента, расположенный в корпусе по ходу движения элемента до роликов (2) и (3), именуемый «датчик замедления» и подключенный к приводу (4) перемещения прижимного ролика (3). Кроме того, устройство предпочтительно включает второй датчик (6) наличия элемента, расположенный в корпусе по ходу движения элемента после роликов (2) и (3), именуемый «контрольная точка» и подключенный к приводу (4) перемещения прижимного ролика (3). Устройство отсчета позиции элемента предпочтительно включает датчик (7) определения положения прижимного ролика (3), расположенный в корпусе и подключенный к приводу (4) перемещения прижимного ролика (3). Предпочтительно оси вращения прижимного (3) и счетного (2) роликов расположены в одной плоскости. Прижимной (3) и счетный (2) ролики предпочтительно выполнены с возможностью вращения вокруг соответствующих осей в обоих направлениях. В предпочтительном варианте в качестве элемента может быть использована капсула с источником радиоактивного излучения или ее имитатор.
Предпочтительный пример эксплуатации заявляемого технического решения описан на примере использования устройства отсчета позиции элемента в составе узла выбора каналов брахитерапевтического аппарата. В качестве элемента использована капсула с источником радиоактивного излучения, а в качестве гибкого стержня - трос.
Источник перемещается через устройство отсчета позиции элемента вдоль оси (8) с помощью троса, движимого приводом брахитерапевтического аппарата. При обнаружении источника первым датчиком (5) наличия элемента «точка замедления» скорость перемещения элемента уменьшается, а прижимной ролик (3) перемещается от счетного ролика (2) посредством привода (4) перемещения прижимного ролика (3), за счет подключения первого датчика (5) наличия элемента к приводу (4) перемещения прижимного ролика (3). Источник беспрепятственно проходит между роликами (2) и (3) и в момент обнаружения его вторым датчиком (6) наличия элемента «контрольная точка», также подключенным к приводу (4) перемещения прижимного ролика (3), прижимной ролик (3) перемещается посредством привода (4) к счетному ролику (2), прижимая трос источника к счетному ролику (2). Скорость перемещения источника устанавливается на предпочтительное значение и начинается отсчет позиции элемента устройством посредством вращения счетного ролика (2) датчика (1) углового положения с определением длины выдвинутого троса. Положение прижимного ролика (3) и направления его перемещений определяются датчиком (7) определения положения прижимного ролика (3), подключенным к приводу (4) перемещения прижимного ролика (3). При необходимости возвращения источника излучения в защитное хранилище брахитерапевтического аппарата направление его перемещения меняется и прижимной (3) и счетный (2) ролики вращаются в обратную сторону. При обнаружении отсутствия элемента вторым датчиком (6) наличия элемента «контрольная точка», за счет его подключения к приводу (4) перемещения прижимного ролика (3), прижимной ролик (3) перемещается посредством привода (4) от счетного ролика (2) и источник беспрепятственно продолжает двигаться в обратном направлении в защитное хранилище брахитерапевтического аппарата.
Заявляемое техническое решение может применятся в аппаратах брахитерапии, а также в системах отсчета позиции тросовых элементов. Решение характеризуется повышенной точностью отсчета позиции элемента.
Представленные фигуры, описание конструкции и использования устройства отсчета позиции элемента, перемещаемого с помощью гибкого стержня брахитерапевтического аппарата, не исчерпывают возможные варианты исполнения и не ограничивают каким-либо образом объем заявляемого технического решения. Возможны иные варианты исполнения в объеме заявляемой формулы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ИЗОГНУТЫХ ТРУБ | 2016 |
|
RU2622197C1 |
| КУРВИМЕТР ДОРОЖНЫЙ | 2023 |
|
RU2808440C1 |
| Контроллер управления режимами движения рельсовых тяговых транспортных средств. | 2019 |
|
RU2720390C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| Устройство для диагностики воздушных линий электропередач | 2016 |
|
RU2646544C1 |
| Электромеханическое запорное устройство капота автомобиля | 2021 |
|
RU2767211C1 |
| Лифт грузопассажирский рудничный | 2020 |
|
RU2784651C1 |
| ПЛАВАТЕЛЬНОЕ СРЕДСТВО С ИНФОРМАЦИОННЫМ ДИСПЛЕЕМ | 2015 |
|
RU2594456C1 |
| Способ определения деформации элементов конструкции дельта-робота, которая проявляется только в процессе его движения | 2020 |
|
RU2754423C1 |
Изобретение относится к медицинской технике, а именно к устройству отсчета позиции элемента, перемещаемого с помощью гибкого стержня брахитерапевтического аппарата. Устройство включает корпус с расположенным в нем датчиком углового положения, включающим вал и счетный ролик, выполненный с возможностью передачи крутящего момента валу, и прижимным роликом, выполненным с возможностью прижатия гибкого стержня к счетному ролику и подключенным к приводу перемещения прижимного ролика. Устройство имеет первый датчик наличия элемента, расположенный в корпусе по ходу движения элемента до прижимного и счетного роликов, и второй датчик наличия элемента, расположенный в корпусе по ходу движения элемента после счетного и прижимного роликов, подключенные к приводу перемещения прижимного ролика. Устройство содержит датчик определения положения прижимного ролика, расположенный в корпусе и подключенный к приводу перемещения прижимного ролика. Оси вращения прижимного и счетного роликов расположены в одной плоскости. Технический результат заявляемого решения заключается в повышении точности отсчета позиции элемента, перемещаемого с помощью гибкого стержня. 1 з.п. ф-лы, 2 ил.
1. Устройство отсчета позиции элемента, перемещаемого с помощью гибкого стержня брахитерапевтического аппарата, включающее корпус с расположенным в нем датчиком углового положения, включающим вал и счетный ролик, выполненный с возможностью передачи крутящего момента валу, и прижимным роликом, выполненным с возможностью прижатия гибкого стержня к счетному ролику и подключенным к приводу перемещения прижимного ролика, первый датчик наличия элемента, расположенный в корпусе по ходу движения элемента до прижимного и счетного роликов, и второй датчик наличия элемента, расположенный в корпусе по ходу движения элемента после счетного и прижимного роликов, подключенные к приводу перемещения прижимного ролика, и датчик определения положения прижимного ролика, расположенный в корпусе и подключенный к приводу перемещения прижимного ролика, при этом оси вращения прижимного и счетного роликов расположены в одной плоскости.
2. Устройство отсчета позиции элемента по п.1, отличающееся тем, что прижимной и счетный ролики выполнены с возможностью вращения вокруг соответствующих осей в обоих направлениях.
| US 4851694 A, 25.07.1989 | |||
| US 5139473 A1, 18.08.1992 | |||
| US 20030135102 A1, 17.07.2003 | |||
| US 5103395 A1, 07.04.1992 | |||
| US 20230115801 A1, 13.04.2023 | |||
| US20030139641 A1, 24.07.2003 | |||
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПАЦИЕНТА ДЛЯ СИСТЕМ РАДИАЦИОННОЙ ТЕРАПИИ | 2004 |
|
RU2342172C2 |
