Изобретение относится к области автомобилестроения, а именно к разделу использования информационной техники в конструкциях транспортных средств, и может быть использовано для роботизации транспортных средств.
Известен способ автоматического выявления отказов транспортного средства, заключающийся в том, что предварительно транспортные средства оборудуют бортовой локальной сетью и программными средствами OBD II в ее составе, которые при эксплуатации автоматически выявляют и запоминают признаки несоответствий по многочисленным контролируемым параметрам функционирования и износа транспортного средства. По результатам программного обобщения выявленных несоответствий средства OBD II обеспечивают возможности выдачи нескольких обобщенных предупреждений водителю, в том числе об отказах, двигательной установки, антиблокировочной тормозной системы, системы управления подушками безопасности, об опасном падении давления в шинах колес или в пневматическом тормозном приводе, равносильных отказу транспортного средства [1].
Недостатками известного способа является отсутствие функций автоматического выполнения операций противоаварийного управления отказавшим транспортным средством после выявления отказа и немногочисленность выявляемых видов отказов, вызванная ограниченными возможностями бортовой локальной сети транспортных средств и номенклатуры штатных датчиков. В результате развитие последствий и ущерба от отказов целиком зависит от опыта водителя и не минимизируется.
Наиболее близким техническим решением является принятый в качестве прототипа способ автоматического выявления отказов и последующего противоаварийного управления отказавшим беспилотным транспортным средством. Способ заключается в том, что предварительно на транспортном средстве размещают множество датчиков и компьютерную систему, которая на основе данных, получаемых от множества датчиков, циклически параллельно формирует и обновляет как базовую, так и аварийную траекторию движения, причем после выявления отказа того или иного характера производится перевод управления движением беспилотного транспортного средства с реализации базовой на аварийную траекторию движения [2].
Недостатками известного способа является ограничение возможностей автоматического противоаварийного управления функцией выбора места для остановки после отказа и отсутствие функций управления компонентами отказавшего беспилотного транспортного средства после отказа, а также ограничение номенклатуры выявляемых видов отказов только одним их видом, при котором нарушается передача данных в системе управления движением беспилотного транспортного средства, вследствие чего изменяется траектория движения. Однако при этом не обеспечивается в разных режимах работы выявление остальных отказов, в том числе, вызывающих разрушение агрегатов, возгорания, опасность для других участников дорожного движения или признаки опасности последующего отказа систем управления беспилотного транспортного средства, разрушение специального оборудования, требуемого для выполнения работы на линии; а также отказов, проявляющихся при подготовке к выезду или на холостом ходу двигателя. В результате выявляется лишь небольшая часть отказов и не минимизируются их последствия и ущерб от них. Кроме того, недостатком известного способа является расчет единственной аварийной траектории движения, что приемлемо только для одного вида отказов. В реальности для множества возможных отказов необходимо рассчитывать пакет из многих аварийных траекторий, но известный способ не предусматривает контроль требуемых для этого расчета переменных.
Техническая задача, на решение которой направлено изобретение, заключается в обеспечении полноты автоматического выявления отказов и наиболее эффективного последующего противоаварийного управления отказавшим беспилотным транспортным средством.
Решение поставленной технической задачи достигается тем, что в способе автоматического выявления отказов и последующего противоаварийного управления отказавшим беспилотным транспортным средством, заключающемся в том, что предварительно транспортное средство оборудуют средствами контроля местонахождения и движения, средствами телеметрии и вычислительным устройством, хранящим предельные значения параметров, отражающих наступление отказов системы управления движением беспилотного транспортного средства, и снабженным программным обеспечением для выявления указанных отказов, причем при движении беспилотного* транспортного средства программное обеспечение выявляет отказы в передаче данных системой управления движением, а данные о контролируемых местонахождении и движении использует для реализации алгоритма выбора приемлемого места и остановки беспилотного транспортного средства, причем данные о выявленных отказах передает средство телеметрии, согласно изобретению предварительно беспилотное транспортное средство, в том числе его компоненты и их исполнительные механизмы управления дополнительно оборудуют датчиками технического состояния и функционирования, а программное обеспечение вычислительного устройства снабжают алгоритмом идентификации режима работы беспилотного транспортного средства по штатным параметрам функционирования компонентов и движения, алгоритмами выявления отказов беспилотного транспортного средства по сигналам отказа от штатных электронных блоков и модулей управления, по результатам сопоставления команд управления с реакциями исполнительных механизмов, значениями или по несанкционированному изменению контролируемых параметров, а также алгоритмами противоаварийного управления отказавшим беспилотным транспортным средством, далее при эксплуатации беспилотного транспортного средства сообразно его идентифицированному режиму работы выполняют алгоритмы выявления отказов беспилотного транспортного средства и по выявленным несоответствиям фиксируют наступление отказа, после чего осуществляют выбор алгоритма противоаварийного управления отказавшим беспилотным транспортным средством, включающего операции включения аварийной радио- и световой сигнализации, управления движением до места аварийной остановки, отключения и переключения компонентов в аварийный режим, формирования и передачи данных об отказе и местоположении отказавшего беспилотного транспортного средства перевозчику, владельцу и службе дорожной технической помощи.
Решение поставленной технической задачи достигается также тем, что в качестве датчиков, которыми дополнительно оборудуют беспилотное транспортное средство, в том числе его компоненты и их исполнительные механизмы управления, используют, например, датчики или иные средства контроля транспортной конфигурации механических частей транспортного средства, нехарактерных для нормального функционирования вибраций и стуков, возгорания, затопления, ударного замедления, оборотов стартера, степени срабатывания исполнительных механизмов управления беспилотным транспортным средством и его компонентами.
Решение поставленной технической задачи достигается также тем, что в качестве параметров функционирования компонентов и движения беспилотного транспортного средства, позволяющих идентифицировать режим работы последнего, используют, например, обороты двигателя, скорость движения, электрическое напряжение в бортовой сети электроснабжения, напряжение на пусковом подогревателе, напряжение на пусковом реле стартера, наличие груза или пассажиров в транспортном средстве.
Решение поставленной технической задачи достигается также тем, что в качестве алгоритмов противоаварийного управления отказавшим беспилотным транспортным средством используют, например, такие, как автоматическое включение радио- и световой аварийной сигнализации, задействование для остановки иных тормозных систем, помимо рабочей, включение стояночной тормозной системы, управление после остановки дверями и прочими механизмами пассажирского транспортного средства, управление остановкой двигателя внутреннего сгорания, перевод системы электроснабжения и бортовой локальной сети в аварийный режим минимального энергопотребления, перевод специального оборудования специализированных транспортных средств в аварийный режим, приведение в рабочее положение выдвижных приспособлений для подъема и эвакуации беспилотного транспортного средства, выполнение проверки допустимости повторного пуска двигателя внутреннего сгорания после неудачной попытки пуска или вынужденной остановки из-за его перегрева, формирование и передача сообщения об отказе и месте аварийной остановки.
Решение поставленной технической задачи достигается также тем, что в качестве отказов беспилотных транспортных средств выявляют, например, такие отказы технического характера, как несрабатывание стартера, подтормаживание одного или более колесных тормозных механизмов при движении, самопроизвольное падение оборотов или перегрев двигателя, нарушение транспортной конфигурации и отказы юридического характера, такие, как, например, столкновение с транспортным средством, наезд на пешехода, несанкционированный перехват управления, угон, взлом кузова автофургона, а также отказы экономического характера, опасные цепным развитием неисправности, при которых, например, необходимо незамедлительно прекратить работу двигателя внутреннего сгорания при появлении в нем звонких стуков или аварийном падении давления моторного масла.
Решение поставленной технической задачи достигается благодаря автоматическому выполнению идентификации режима работы беспилотного транспортного средства по параметрам функционирования компонентов и движения, сообразно результатам которой контролируют наступление отказа беспилотного транспортного средства по сигналам отказа от штатных электронных блоков и модулей управления, по результатам сопоставления команд управления с реакциями исполнительных механизмов, по результатам расчета несоответствия контролируемых параметров движения, состояния и функционирования компонентов с предельными значениями, или по несанкционированному изменению контролируемых параметров. При выявлении отказа беспилотного транспортного средства выбирают сообразно режиму его работы алгоритмы противоаварийного управления, включающего операции управления движением до места аварийной остановки, отключения и переключения компонентов в аварийный режим.
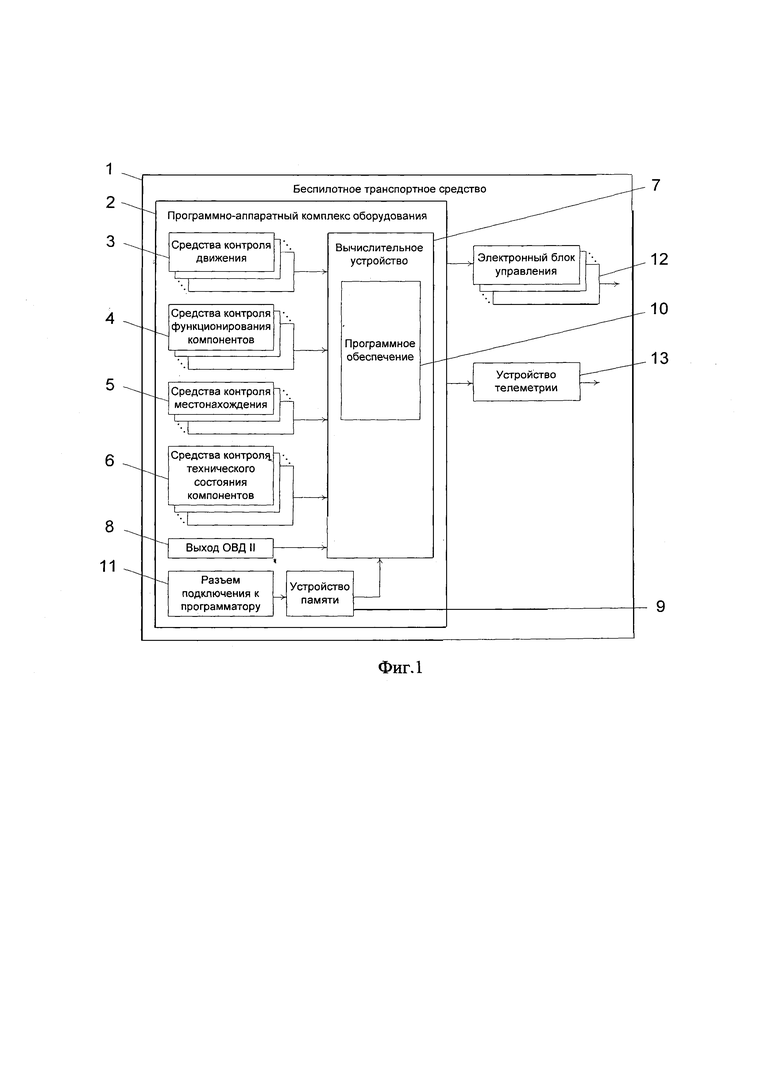
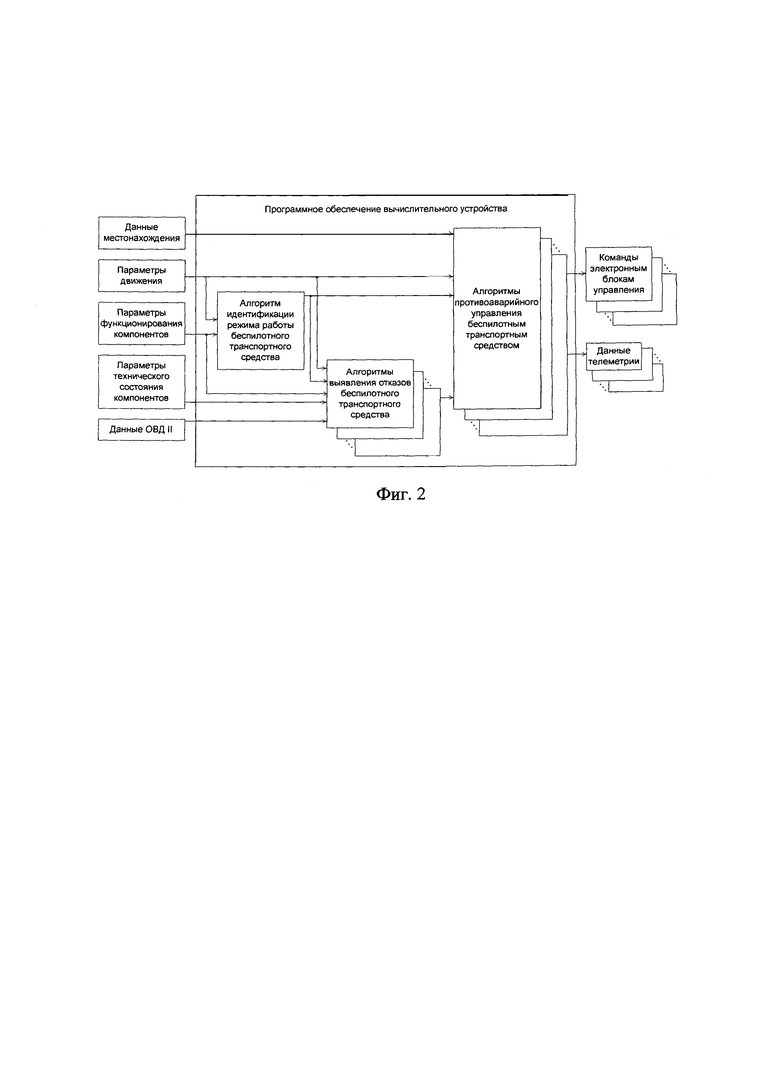
Изобретение поясняется чертежами, где на фиг. 1 представлена блок-схема программно-аппаратного комплекса оборудования для автоматического выявления отказов и последующего противоаварийного управления отказавшим беспилотным транспортным средством; на фиг. 2 приведена иллюстрация структуры программного обеспечения вычислительного устройства в составе комплекса оборудования для автоматического выявления отказов и последующего противоаварийного управления отказавшим беспилотным транспортным средством.
Способ автоматического выявления отказов и последующего противоаварийного управления отказавшим беспилотным транспортным средством состоит в том, что предварительно транспортное средство оборудуют средствами контроля местонахождения и движения, средствами телеметрии и вычислительным устройством, хранящим предельные значения параметров, отражающих наступление отказов системы управления движением беспилотного транспортного средства вследствие нарушений в передаче данных, и снабжают программным обеспечением для выявления указанных отказов. Этим достигается возможность автоматического выявления отказов в передаче данных в системе управления движением беспилотного транспортного средства, а после выявления отказа возможность противоаварийного управления движением по аварийной траектории до места аварийной остановки.
При движении беспилотного транспортного средства программное обеспечение выполняет алгоритмы выявления отказа вследствие нарушений в передаче данных по несоответствиям фактических значений параметров, отражающих наступление отказа системы управления движением, с предельными значениями, заранее установленными для беспилотного транспортного средства. Это служит условием своевременного перевода управления движением беспилотного транспортного средства с базовой на аварийную траекторию движения.
Данные о контролируемых местонахождении и движении беспилотного транспортного средства используются программным обеспечением для реализации алгоритма выбора приемлемого места и остановки транспортного средства после выявления отказа. Этим обеспечивается исключение остановки беспилотного транспортного средства в неприемлемом месте, например, на перекрестке.
Данные о выявленных отказах передают средствами телеметрии заинтересованным получателям. Тем самым создаются предпосылки для оказания помощи беспилотному транспортному средству после отказа.
Кроме того, предварительно беспилотное транспортное средство, в том числе его компоненты и их исполнительные механизмы управления дополнительно оборудуют датчиками технического состояния и функционирования. В числе таких датчиков могут быть датчики или иные средства контроля транспортной конфигурации механических частей транспортного средства, нехарактерных для нормального функционирования вибраций и стуков, возгорания, затопления, замедления, оборотов стартера, а также датчики степени срабатывания исполнительных механизмов управления беспилотным транспортным средством и его компонентами. Этим достигается наибольший охват контролем в автоматическом режиме десятков возможных отказов беспилотного транспортного средства, в том числе и редких, как например, возгорание, опрокидывание, столкновение, самопроизвольная остановка двигателя и др.
Предварительно программное обеспечение вычислительного устройства снабжают алгоритмом идентификации режима работы беспилотного транспортного средства по штатным параметрам функционирования компонентов и движения. В числе таких параметров могут использоваться, например, обороты двигателя, скорость движения, электрическое напряжение в бортовой сети электроснабжения, напряжение на пусковом подогревателе, напряжение на пусковом реле стартера, наличие груза или пассажиров в транспортном средстве. Идентификация режима работы беспилотного транспортного средства необходима в связи с тем, что для каждого из режимов характерны разные отказы, выявление которых требует обработки сигналов разных датчиков. Кроме того, от режима работы беспилотного транспортного средства зависит выбор наиболее рационального алгоритма противоаварийного управления отказавшим беспилотным транспортным средством. При этом идентификация режима работы по штатным параметрам функционирования компонентов и движения беспилотного транспортного средства повлечет минимум необходимых аппаратурных затрат и упрощение, идентификации.
Программное обеспечение вычислительного устройства снабжают также алгоритмами выявления отказов беспилотного транспортного средства по сигналам отказа от штатных электронных блоков и модулей управления, по результатам сопоставления команд управления с реакциями исполнительных механизмов, по результатам расчета несоответствия контролируемых параметров движения, состояния и функционирования компонентов с предельными значениями, или по несанкционированному изменению контролируемых параметров. Разнообразие алгоритмов выявления отказов беспилотного транспортного средства обеспечивает наибольший охват контролем в автоматическом режиме десятков параметров и сигналов, в том числе по признаку отсутствия сигнала штатной формы в цепях управления, используемых для выявления событий отказа разного вида.
Кроме этого, программное обеспечение вычислительного устройства снабжают алгоритмами противоаварийного управления отказавшим беспилотным транспортным средством. Это обеспечивает не только выбор приемлемого места и остановки беспилотного транспортного средства после выявления отказа, но и выполнение десятка других противоаварийных алгоритмов управления отказавшим беспилотным транспортным средством, таких, как включение радио- и световой аварийной сигнализации, задействование для остановки иных тормозных систем, помимо рабочей, включение стояночной тормозной системы, управление после остановки дверями и прочими механизмами пассажирского транспортного средства, остановка, двигателя внутреннего сгорания, перевод системы электроснабжения и бортовой локальной сети в аварийный режим минимального энергопотребления, перевод специального оборудования специализированных транспортных средств в аварийный режим, приведение в рабочее положение выдвижных приспособлений для подъема и эвакуации беспилотного транспортного средства, выполнение проверки допустимости повторного пуска двигателя внутреннего сгорания после неудачной попытки пуска или вынужденной остановки из-за его перегрева, передача сообщения об отказе и аварийной остановке и др.
При эксплуатации беспилотного транспортного средства сообразно его идентифицированному режиму работы выполняют алгоритмы выявления отказов и по выявленным несоответствиям фиксируют наступление отказа. При этом для эффективности последующего противоаварийного управления отказавшим беспилотным транспортным средством достаточно выявлять только факт наступления и вид отказа. Для находящихся в эксплуатации беспилотных транспортных средств необходимо выявлять десятки таких видов отказов, включая, например, такие отказы технического характера, как несрабатывание стартера, подтормаживание одного или более колесных тормозных механизмов при движении, самопроизвольное падение оборотов или перегрев двигателя, нарушение транспортной конфигурации и отказы юридического характера, как, например, столкновение с транспортным средством, наезд на пешехода, несанкционированный перехват управления, угон, взлом кузова автофургона, а также отказы экономического характера, опасные цепным развитием неисправности, при которых, например, нужно незамедлительно прекращать работу двигателя внутреннего сгорания при появлении в нем звонких стуков или аварийном падении давления моторного масла. Определение неисправного компонента и характера неисправности не требуется для противоаварийного управления отказавшим транспортным средством и должно осуществляться средствами диагностирования в производственных условиях авторемонтного предприятия уже при устранении отказа. Выявление факта наступления и вида отказов служит условием эффективности и своевременности выполнения операций противоаварийного управления отказавшим беспилотным транспортным средством.
После выявления отказа в соответствии с его характером и режимом работы беспилотного транспортного средства осуществляют выбор алгоритма противоаварийного t управления отказавшим беспилотным транспортным средством, включающего операции включения аварийной радио- и световой сигнализации, управления движением до места аварийной остановки, отключения и переключения компонентов в аварийный режим, формирования и передачи данных об отказе и местоположении отказавшего беспилотного транспортного средства перевозчику, владельцу и службе дорожной технической помощи, разблокирование и открывание дверей пассажирского беспилотного транспортного средства. Выполнение в автоматическом режиме операций противоаварийного управления сообразно характеру отказа и режиму работы отказавшего беспилотного транспортного средства обеспечивает незамедлительную реакцию всех его штатных технических средств и всех заинтересованных в работе транспортного средства на факт отказа и тем самым позволяет минимизировать его последствия.
Автоматическое выявление отказов и последующее противоаварийное управление отказавшим беспилотным транспортным средством осуществляют с использованием программно-аппаратного комплекса, размещаемого или встраиваемого в конструкцию и программное обеспечение беспилотного транспортного средства. Программное обеспечение, например, может быть установлено в один из штатных электронных блоков управления транспортного средства с достаточным резервом вычислительных возможностей и памяти.
Беспилотное транспортное средство 1 снабжают программно-аппаратным комплексом 2 оборудования, включающим в себя средства 3 контроля движения, средства 4 контроля функционирования компонентов, средства 5 контроля местонахождения, средства 6 контроля технического состояния компонентов, которые своими выходами подключены ко входам вычислительного устройства 7, к другим входам которого подсоединены выход 8 OBD II бортовой локальной сети и выход устройства 9 памяти согласно фиг. 1. Вычислительное устройство 7 снабжено программным обеспечением 10, а вход устройства 9 памяти связан с разъемом 11 для подключения к программатору. При этом первый выход вычислительного устройства 7 подсоединен ко входам электронных блоков 12 управления беспилотного транспортного средства, а второй выход - к входу устройства 13 телеметрии.
Программное обеспечение вычислительного устройства 7 снабжено алгоритмом идентификации режима работы беспилотного транспортного средства по штатным параметрам функционирования компонентов и движения транспортного средства, пакетом алгоритмов выявления отказов беспилотного транспортного средства в идентифицированном режиме работы по параметрам движения, функционирования и технического состояния компонентов, данным OBD II бортовой локальной сети и предельным значениям указанных параметров, внесенным в устройство 9 памяти, а также пакетом алгоритмов противоаварийного управления отказавшим беспилотным транспортным средством сообразно виду отказа и режиму работы транспортного средства и с учетом его местонахождения и движения согласно фиг. 2. Команды алгоритма противоаварийного управления отказавшим беспилотным транспортным средством реализуются штатными электронными блоками 12 управления и устройством 13 телеметрии согласно фиг. 2.
Способ автоматического выявления отказов и последующего противоаварийного управления отказавшим беспилотным транспортным средством реализуется следующим образом.
При изготовлении беспилотного транспортного средства 1 на последнем размещают согласно фиг. 1 программно-аппаратный комплекс 2 оборудования. Перед началом эксплуатации предварительно с помощью внешнего программатора вносят в устройство 9 памяти предельные значения параметров, которые используют для выявления отказов беспилотного транспортного средства 1.
При последующей эксплуатации беспилотного транспортного средства 1 размещенные на нем средства 3, контроля движения и средства 4 контроля функционирования компонентов циклически выдают данные в вычислительное устройство 7, которое с помощью реализуемого им алгоритма по штатным параметрам функционирования компонентов и движения транспортного средства циклически идентифицирует режим работы беспилотного транспортного средства.
Сообразно идентифицированному режиму работы программное обеспечение выбирает и реализует один из алгоритмов в составе пакета алгоритмов выявления отказов беспилотного транспортного средства, используя для этого параметры движения и местонахождения транспортного средства, параметры функционирования и технического состояния компонентов, параметры данные OBD II бортовой локальной сети и предельные значения параметров, внесенные в устройство 9 памяти.
В соответствии с выявленным отказом и режимом работы беспилотного транспортного средства при выявлении отказа программное обеспечение выбирает и реализует выполнение одного алгоритма из пакета алгоритмов противоаварийного управления отказавшим беспилотным транспортным средством, используя для этого данные по параметрам местонахождения и движения транспортного средства.
Автоматическое выявление отказов и последующее противоаварийное управление отказавшим беспилотным транспортным средством применимо при эксплуатации беспилотных транспортных средств для минимизации экономических потерь от отказов и повышения безопасности дорожного движения и безопасности пассажиров и груза отказавшего беспилотного транспортного средства.
Таким образом, изобретение позволит с наибольшей полнотой осуществлять автоматическое выявление отказов и последующее противоаварийное управление отказавшим беспилотным транспортным средством.
Источники информации, принятые во внимание при экспертизе:
1. SAE J2012. Standard: Diagnostic Trouble Code Definitions. Issued: 1992-06 SAE International Inc., 2012. - URL: https://law.resource.org/pub/us/cfr/ibr/005/sae.j2012.2002.pdf
2. Патент РФ №2778387, МПК B60W 10/04, G08G 1/16, B60W 50/02, B60W 60/00, опубл. 2022 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ПРАВИЛЬНОСТИ ЭКСПЛУАТАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ, СЕЛЬСКОХОЗЯЙСТВЕННЫХ И ДОРОЖНЫХ МАШИН | 2014 |
|
RU2549160C1 |
| Способ дистанционного управления высокоавтоматизированным транспортным средством | 2023 |
|
RU2807410C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОПЕРЕКАЧИВАЮЩИМ АГРЕГАТОМ "КВАНТ-Р" | 2017 |
|
RU2660216C1 |
| Бортовой аналитический комплекс для транспортных средств | 2022 |
|
RU2787310C1 |
| Комплексная система мониторинга, контроля и управления техническими системами жизнеобеспечения и безопасности автономных объектов | 2024 |
|
RU2828372C1 |
| Система поддержки принятия решений с модульной структурой для операторов судов двойного действия | 2019 |
|
RU2713077C1 |
| Способ формирования отказоустойчивой комплексной системы управления (КСУ) и отказоустойчивая КСУ | 2016 |
|
RU2629454C2 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2370416C1 |
| Способ управления работой системы активной безопасности транспортных средств | 2018 |
|
RU2704357C1 |
Изобретение относится к способу автоматического выявления отказов и последующего противоаварийного управления отказавшим беспилотным транспортным средством. Транспортное средство содержит средства контроля местонахождения и движения, телеметрии и вычислительным устройством, хранящим предельные значения параметров, отражающих наступление отказов системы управления движением беспилотного транспортного средства. Данные о местонахождении и движении использует для реализации алгоритма выбора приемлемого места и остановки беспилотного транспортного средства. Данные о выявленных отказах передает средство телеметрии. Программное обеспечение вычислительного устройства снабжено алгоритмом идентификации режима работы по штатным параметрам функционирования компонентов и движения, алгоритмами выявления отказов по сигналам отказа от электронных блоков и модулей управления. После выявления отказа выполняется алгоритм противоаварийного управления отказавшим беспилотным транспортным средством, осуществляется: включение аварийных радио и световой сигнализации, управление движением до места аварийной остановки, отключение и переключение компонентов в аварийный режим, формирование и передача данных об отказе и местоположении отказавшего беспилотного транспортного средства перевозчику, владельцу и службе дорожной технической помощи. Достигается автоматическое выявление отказов и противоаварийное управление. 4 з.п. ф-лы, 2 ил.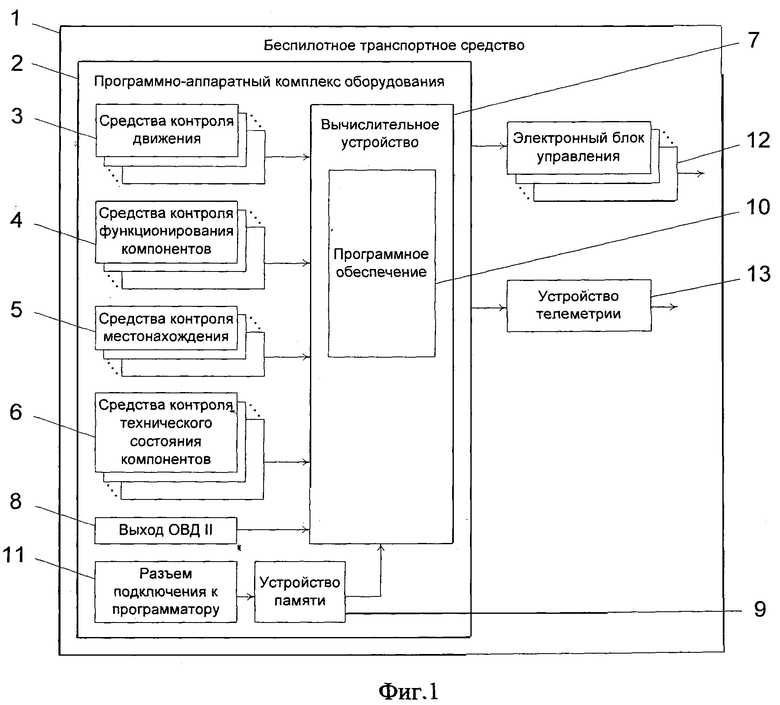
1. Способ автоматического выявления отказов и последующего противоаварийного управления отказавшим беспилотным транспортным средством, заключающийся в том, что предварительно транспортное средство оборудуют средствами контроля местонахождения и движения, средствами телеметрии и вычислительным устройством, хранящим предельные значения параметров, отражающих наступление отказов системы управления движением беспилотного транспортного средства, и снабженным программным обеспечением для выявления указанных отказов, причем при движении беспилотного транспортного средства программное обеспечение выявляет отказы в передаче данных системой управления движением, а данные о контролируемых местонахождении и движении использует для реализации алгоритма выбора приемлемого места и остановки беспилотного транспортного средства, причем данные о выявленных отказах передает средство телеметрии, отличающийся тем, что предварительно беспилотное транспортное средство, в том числе его компоненты и их исполнительные механизмы управления, дополнительно оборудуют датчиками технического состояния и функционирования, а программное обеспечение вычислительного устройства снабжают алгоритмом идентификации режима работы беспилотного транспортного средства по штатным параметрам функционирования компонентов и движения, алгоритмами выявления отказов беспилотного транспортного средства по сигналам отказа от 4 штатных электронных блоков и модулей управления, по результатам сопоставления команд управления с реакциями исполнительных механизмов, по результатам расчета несоответствия контролируемых параметров движения, состояния и функционирования компонентов с предельными значениями или по несанкционированному изменению контролируемых параметров, а также алгоритмами противоаварийного управления отказавшим беспилотным транспортным средством, далее при эксплуатации беспилотного транспортного средства сообразно его идентифицированному режиму работы выполняют алгоритмы выявления отказов беспилотного транспортного средства и по выявленным несоответствиям фиксируют наступление отказа, после чего осуществляют выбор алгоритма противоаварийного управления отказавшим беспилотным транспортным средством, включающего операции включения аварийной радио- и световой сигнализации, управления движением до места аварийной остановки, отключения и переключения компонентов в аварийный режим, формирования и передачи данных об отказе и местоположении отказавшего беспилотного транспортного средства перевозчику, владельцу и службе дорожной технической помощи.
2. Способ п. 1, отличающийся тем, что в качестве датчиков, которыми дополнительно оборудуют беспилотное транспортное средство, в том числе его компоненты и их исполнительные механизмы управления, используют, например, датчики или иные средства контроля транспортной конфигурации механических частей транспортного средства, нехарактерных для нормального функционирования вибраций и стуков, возгорания, затопления, ударного замедления, оборотов стартера, степени срабатывания исполнительных механизмов управления беспилотным транспортным средством и его компонентами.
3. Способ п. 1, отличающийся тем, что в качестве параметров функционирования компонентов и движения беспилотного транспортного средства, позволяющих идентифицировать режим работы последнего, используют, например, обороты двигателя, скорость движения, электрическое напряжение в бортовой сети электроснабжения, напряжение на пусковом подогревателе, напряжение на пусковом реле стартера, наличие груза или пассажиров в транспортном средстве.
4. Способ п. 1, отличающийся тем, что в качестве алгоритмов противоаварийного управления отказавшим беспилотным транспортным средством используют, например, такие, как автоматическое включение радио- и световой аварийной сигнализации, задействование для остановки иных тормозных систем, помимо рабочей, включение стояночной тормозной системы, управление после остановки дверями и прочими механизмами пассажирского транспортного средства, управление остановкой двигателя внутреннего сгорания, перевод системы электроснабжения и бортовой локальной сети в аварийный режим минимального энергопотребления, перевод специального оборудования специализированных транспортных средств в аварийный режим, приведение в рабочее положение выдвижных приспособлений для подъема и эвакуации беспилотного транспортного средства, выполнение проверки допустимости повторного пуска двигателя внутреннего сгорания после неудачной попытки пуска или вынужденной остановки из-за его перегрева, формирование и передача сообщения об отказе и месте аварийной остановки.
5. Способ п. 1, отличающийся тем, что в качестве отказов беспилотных транспортных средств выявляют, например, такие отказы технического характера, как несрабатывание стартера, подтормаживание одного или более колесных тормозных механизмов при движении, самопроизвольное падение оборотов или перегрев двигателя, нарушение транспортной конфигурации и отказы юридического характера, такие, как, например, столкновение с транспортным средством, наезд на пешехода, несанкционированный перехват управления, угон, взлом кузова автофургона, а также отказы экономического характера, опасные цепным развитием неисправности, при которых, например, необходимо незамедлительно прекратить работу двигателя внутреннего сгорания при появлении в нем звонких стуков или аварийном падении давления моторного масла.
| RU 2778387 C2, 18.08.2022 | |||
| CN 107369228 A, 21.11.2017 | |||
| CN 102464108 A, 23.05.2012 | |||
| US 9217376 B2, 22.12.2015 | |||
| WO 9936297 B1, 07.10.1999. |
