Область техники, к которой относится изобретение
Изобретение относится к способу выполнения сельскохозяйственного рабочего процесса в поле при помощи группы сельскохозяйственных рабочих машин согласно ограничительной части пункта 1 формулы изобретения.
Уровень техники
При выполнении сельскохозяйственных рабочих процессов на полях большой протяженности часто используют группу сельскохозяйственных рабочих машин. При этом оптимальная работа каждой рабочей машины такой группы имеет особое значение, чтобы максимизировать эффективность рабочего процесса в целом. Это относится, в частности, к рабочим агрегатам рабочих машин. Эти рабочие агрегаты могут быть настроены с помощью параметров машины для адаптации к соответствующим сельскохозяйственным условиям. Оптимизация параметров машины имеет особое значение с точки зрения указанной эффективности рабочего процесса.
Известный способ (ЕР 3400774 А1), из которого исходит изобретение, относится к выполнению сельскохозяйственного рабочего процесса в поле при помощи группы сельскохозяйственных рабочих машин, которые сообщаются друг с другом при помощи беспроводной сети передачи данных. При этом предусмотрено, чтобы ведущая рабочая машина была выполнена самооптимизирующейся, она генерирует оптимизированные параметры машины и делает их доступными для ведомых рабочих машин через беспроводную сеть передачи данных. Не самооптимизирующиеся ведомые рабочие машины автоматически принимают оптимизированные параметры машины. Таким образом, одна единственная рабочая машина, по существу, управляет всей группой. Однако по мере развития технологизации все больше сельскохозяйственных рабочих машин получают системы помощи водителю, при помощи который они могут генерировать оптимизированные параметры машины для своих собственных рабочих агрегатов. В то время как система "ведущий-ведомый" для рабочих машин с четкой аппаратной иерархией обеспечивает определенное повышение эффективности, для групп сельскохозяйственных рабочих машин, все из которых выполнены самооптимизирующимися, имеется нереализованный потенциал. В частности, система "ведущий-ведомый" для таких групп является недостаточно гибкой.
Опубликованная немецкая заявка на патент DE 102018113327.8 раскрывает способ управления верхнего уровня группой сельскохозяйственных рабочих машин типа системы управления "сверху вниз". При этом, исходя из общего планирования, каждой рабочей машине дается определенное задание, которое она самостоятельно выполняет.
Задачей настоящего изобретения является расширение и дальнейшее усовершенствование известного способа таким образом, чтобы сделать выполнение сельскохозяйственных рабочих процессов группами самооптимизирующихся рабочих машин более гибким и эффективным.
Раскрытие сущности изобретения
Вышеуказанная задача решена при помощи способа согласно ограничительной части пункта 1 формулы изобретения с признаками, указанными в отличительной части этого пункта. Важным является понимание того, что жесткая иерархия в группе сельскохозяйственных рабочих машин может быть заменена динамическими иерархиями. Если рабочие машины группы действуют совместно в виде виртуальной рабочей машины, становится возможным гибко оптимизировать общий сельскохозяйственный рабочий процесс как таковой. При оптимизации отдельной самооптимизирующейся рабочей машины до сих пор получалось так, что общая оптимизация с учетом всех факторов воздействия, включая все взаимные связи, была вообще невозможной по причине очень высокой сложности. Вместо этого подсистемы, например, отдельные рабочие агрегаты, самооптимизирующейся рабочей машины оптимизируются по отдельности, и полученные результаты оптимизации объединяются в рамках общей стратегии. При этом в зависимости от общей стратегии отдельные подсистемы в определенных областях имеют приоритет перед другими подсистемами и на основе собственных результатов оптимизации могут задавать для них уставки. Указанные другие подсистемы, в свою очередь, адаптируют свои собственные результаты оптимизации к этим уставкам. Так, в рамках непрерывного и динамического обмена, который может в любой момент изменяться в зависимости от общей цели, оптимизируется общая рабочая машина. Именно этот принцип перенесен на группу сельскохозяйственных рабочих машин. Важным фактором для взаимодействия по типу виртуальной рабочей машины является то, что результаты оптимизации отдельных рабочих машин снова поступают в группу и используются там, в свою очередь, другими рабочими машинами, в частности, для дальнейшей оптимизации.
В вариантах осуществления согласно пункту 2 формулы изобретения сельскохозяйственные рабочие машины взаимодействуют при сборе данных датчиков и, таким образом, на основе общей базы данных датчиков могут генерировать свои оптимизированные параметры машины. При этом, с одной стороны, с учетом группы можно сэкономить датчики, или, с другой стороны, можно значительно увеличить объем получаемых данных датчиков для оптимизации.
Согласно пункту 3 формулы изобретения может быть предусмотрено, чтобы одинаковые рабочие агрегаты рабочих машин группы, например, все молотильные устройства, были объединены в один виртуальный рабочий агрегат, например, в виртуальное молотильное устройство, и чтобы для этого виртуального рабочего агрегата были установлены оптимизированные параметры машины.
В варианте осуществления согласно пункту 4 формулы изобретения осуществляется взаимодействие, при этом несколько рабочих машин группы обмениваются друг с другом оптимизированными параметрами машины. При этом может быть предусмотрено, чтобы не каждая рабочая машина оптимизировала все свои рабочие агрегаты, но частично перенимала оптимизацию других рабочих машин. Таким образом, можно также распределить оптимизацию всей группы между рабочими машинами и полностью использовать имеющиеся в наличии аппаратные средства в виде систем помощи водителю без необходимости избыточного выполнения почти идентичных действий.
Рабочие машины группы могут также частично работать автономно и при этом использовать общую базу данных, что представляет собой альтернативу согласно пункту 5 формулы изобретения, которая является гораздо более гибкой при менее однородных полевых условиях.
В одном предпочтительном варианте осуществления согласно пункту 6 формулы изобретения рабочие машины генерируют свои оптимизированные параметры машины на основе полевых условий. Поскольку эти полевые условия должны быть определены предпочтительно во время выполнения сельскохозяйственного рабочего процесса или по меньшей мере незадолго до этого, рабочие машины предпочтительно также взаимодействуют друг с другом во время этих определений, чтобы как можно скорее запрограммировать указанные полевые условия.
Пункт 7 формулы изобретения раскрывает другую возможность взаимодействия рабочих машин группы.
Для координации группы и ее взаимодействия согласно пункту 8 формулы изобретения может быть предусмотрен супервизор процесса управления парком машин, который, может, в частности, распределять задачи оптимизации между рабочими машинами. Такая координация приводит к повышению качества урожая и/или эффективности его уборки, поскольку приоритетные стратегии могут быть лучше приняты во внимание.
Для того чтобы рабочие машины группы могли настраивать друг друга, в начале выполнения сельскохозяйственного рабочего процесса может быть, в частности, предусмотрена программа синхронизации. Эта программа синхронизации является объектом пункта 9 формулы изобретения. Перед программой синхронизации или вообще перед началом выполнения сельскохозяйственного рабочего процесса может быть также предусмотрена программа предварительной обработки, которая предпочтительно исполняется на оконечном компьютере, находящемся вне группы. Эта программа предварительной обработки может служить для определения поправочных коэффициентов, чтобы, например, игнорировать различия между рабочими машинами группы во время выполнения рабочего процесса или уменьшать их влияние. Данная программа предварительной обработки является объектом пункта 10 формулы изобретения.
В варианте осуществления согласно пункту 11 формулы изобретения поправочные коэффициенты адаптируют во время выполнения сельскохозяйственного рабочего процесса, чтобы обеспечить текущее улучшение его выполнения.
Вариант осуществления согласно пункту 12 формулы изобретения относится к возможности определения поправочных коэффициентов.
Особенно предпочтительные варианты осуществления согласно пунктам 13 и 14 формулы изобретения относятся к возможности калибровать датчики в группе при помощи данных других датчиков или даже компенсировать отказ датчика. Благодаря тесному взаимодействию рабочих машин, такой отказ датчика может быть по меньшей мере частично компенсирован при помощи данных датчиков другой рабочей машины.
Для того чтобы не производить схожие вычисления в каждой группе, согласно пункту 15 формулы изобретения может быть предусмотрено использование аналогичных пригодных данных другой группы, которые затем предпочтительно следует также адаптировать.
Поскольку на одном поле частично могут иметь место сильно отличающиеся полевые условия, например, зерновая культура в ложбине может иметь гораздо более высокую влажность, чем в остальной части поля, согласно пункту 16 формулы изобретения может быть предусмотрена возможность для пользователя приостанавливать вклад отдельных рабочих машин в виртуальную рабочую машину. В варианте осуществления согласно пункту 17 формулы изобретения группа содержит систему обеспечения качества, которая может выполнять эту задачу. При этом может быть гарантировано, что несовместимые данные не будут оказывать влияние на другие рабочие машины группы.
Вариант осуществления согласно пункту 18 формулы изобретения в самом общем случае относится к возможности для пользователя вмешиваться в сельскохозяйственный процесс с целью управления и/или проверки.
В особенно предпочтительных вариантах осуществления согласно пункту 19 формулы изобретения рабочие машины группы представляют собой сельскохозяйственные рабочие машины одного типа или различные рабочие машины, которые совместно выполняют один сельскохозяйственный рабочий процесс. Благодаря этой совместной деятельности рабочих машин, можно особенно эффективно осуществить их оптимизацию при помощи виртуальной рабочей машины, поскольку одинаковые рабочие машины или одинаковые рабочие процессы часто требуют для многих машин одинаковых процессов оптимизации. Для того чтобы отобразить всю сложность сельскохозяйственных рабочих процессов, согласно пункту 20 формулы изобретения предусмотрено, что рабочие машины группы могут взаимодействовать по меньшей мере с еще одной группой. Эти группы могут, в свою очередь, взаимодействовать наподобие виртуальной рабочей машины.
Краткое описание чертежей
Ниже приведено более подробное описание изобретения при помощи варианта его осуществления, представленного только в качестве примера, со ссылками на прилагаемые чертежи, на которых показаны:
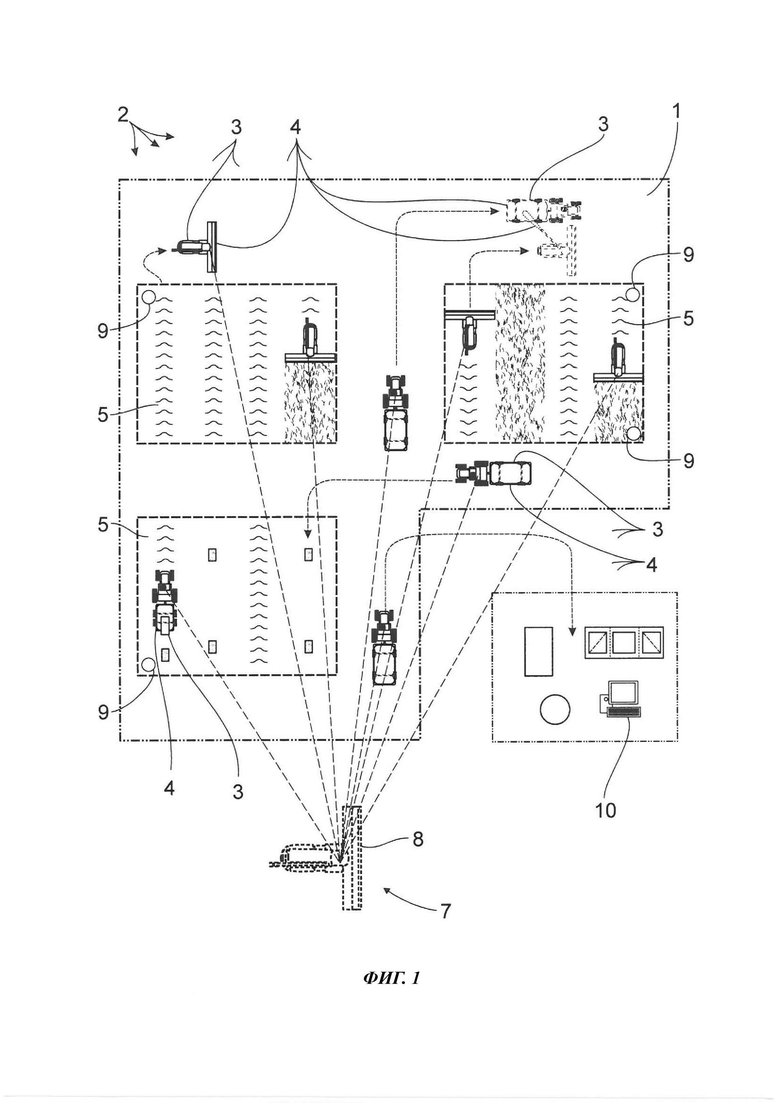
ФИГ. 1 - группа сельскохозяйственных рабочих машин при выполнении предлагаемого способа в поле с различными участками поля и
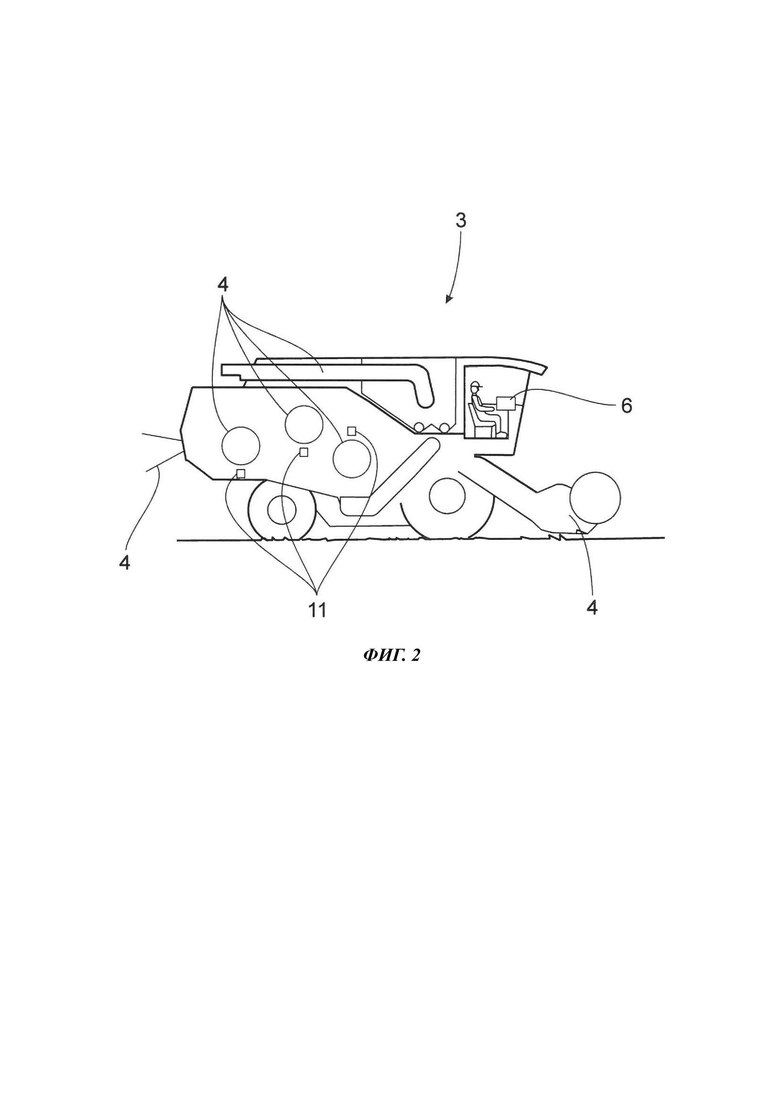
ФИГ. 2 - пример сельскохозяйственной рабочей машины.
Осуществление изобретения
Предлагаемое решение относится к способу выполнения сельскохозяйственного рабочего процесса в поле 1 при помощи группы 2 сельскохозяйственных рабочих машин 3. При этом термин "группа" относится к нескольким сельскохозяйственным рабочим машинам 3, которые взаимодействуют в самом широком смысле для выполнения сельскохозяйственного рабочего процесса.
Рабочие машины 3 группы 2 содержат соответствующие рабочие агрегаты 4. Рабочие агрегаты 4 служат, в частности, для выполнения процесса уборки урожая и при этом предпочтительно - непосредственно для переработки убираемой культуры. Рабочие агрегаты 4 могут быть настроены путем согласования параметров машины с определенными сельскохозяйственными условиями, например, с видом и состоянием культуры на поле 1. На ФИГ. 1 показана группа 2, при помощи которой выполняется сельскохозяйственный рабочий процесс в поле 1. При этом поле 1 разделено на несколько зон 5 поля, которые имеют различные полевые условия. Для того чтобы обеспечить поясняемое далее взаимодействие сельскохозяйственных рабочих машины 3 группы 2, рабочие машины 3 группы 2 сообщаются друг с другом при помощи беспроводной сети передачи данных. Такая рабочая машина 3 в качестве примера представлена на ФИГ. 2.
Рабочие машины 3 группы 2 выполнены в виде самооптимизирующихся рабочих машин 3. Для этого рабочие машины 3 содержат систему 6 помощи водителю, которая обеспечивает автоматическое генерирование и установку параметров машины, оптимизированных для сельскохозяйственных условий. Поскольку эффективность выполнения сельскохозяйственного рабочего процесса в значительной степени зависит от настройки рабочих агрегатов, таким самооптимизирующимся рабочим машинам 3 придается все большее значение.
Важным является то, что рабочие машины 3 группы 2 работают совместно наподобие виртуальной рабочей машины 7. При этом существенно, чтобы результаты самооптимизации, в частности, в виде оптимизированных параметров нескольких рабочих машин 3 группы 2 снова возвращались в группу 2 для дальнейшего применения другими рабочими машинами 3 группы 2. При этом предпочтительно, чтобы группа 2 имела динамические иерархии, изменяющиеся в зависимости от соответствующей задачи группы 2 и/или рабочих машин 3. Это следует понимать, как отход от прежних иерархий типа "ведущий-ведомый". Однако при этом не исключается, что другие, не самооптимизирующиеся рабочие машины подчинены группе или взаимодействуют с ней, участвуя также в выполнении сельскохозяйственного рабочего процесса. При этом, однако, они не являются частью группы в контексте предлагаемого технического решения.
В данном случае и предпочтительно, чтобы рабочие машины 3 группы 2 генерировали данные датчиков, и чтобы несколько рабочих машин 3 группы 2 учитывали данные датчиков других рабочих машин 3 группы 2 при генерировании своих соответствующих оптимизированных параметров машины. Поскольку отдельная рабочая машина 3 группы 2 может собрать данные датчиков только с малой части поля 1, на основании которых затруднительно сделать заключение об общих условиях или о большом количестве связей, достоинство такого обмена данными датчиков является очевидным.
Однако предлагаемое взаимодействие рабочих машин 3 группы 2 не должно быть ограничено простым обменом данными. Дополнительно или альтернативно может быть предусмотрено, чтобы рабочие машины 3 группы 2 совместно собирали данные датчиков и агрегировали их в виртуальные данные датчиков. При этом термин "агрегировать", в принципе означает только, что данные датчиков объединяются. Однако предпочтительно, чтобы данные датчиков обрабатывались программой агрегирования. При этом можно получить, в частности, общее поле характеристик, при помощи которого определяются сельскохозяйственные условия, в частности, поля 1. Агрегирование предпочтительно осуществляется рабочей машиной 7 или, в частности, совместно несколькими или всеми рабочими машинами 3 группы 2 наподобие виртуальной рабочей машины 7. Однако может быть предусмотрено, чтобы этот процесс выполнял, например, внешний сервер.
В принципе, обычно бывает так, что несколько машин 3 группы 2 содержат одинаковые рабочие агрегаты 4. В этом случае предпочтительно, чтобы одинаковые рабочие агрегаты 4 были объединены в один виртуальный рабочий агрегат 8. Таким образом, эти виртуальные рабочие агрегаты могут образовывать виртуальную рабочую машину 7. При этом предпочтительно определяются оптимизированные параметры машины для соответствующего виртуального рабочего агрегата 8, которые затем применяются несколькими рабочими машинами 3 группы 2, содержащими этот рабочий агрегат 4, для указанного рабочего агрегата 4.
Объединение одинаковых рабочих агрегатов 4 в виртуальные рабочие агрегаты 8 не должно охватывать все одинаковые рабочие агрегаты 4. Свои рабочие агрегаты 4 предпочтительно объединяют по меньшей мере те рабочие машины 3 группы 2, которые находятся в одинаковой зоне 5 поля. Таким образом, можно оптимизировать не все рабочие агрегаты 4 группы 2 по отдельности, но совместно рабочие агрегаты 4 с аналогичными свойствами и при аналогичных сельскохозяйственных условиях, в результате чего, с одной стороны, обеспечивается связность в группе 2, а, с другой стороны, уменьшается объем вычислений. Далее поясняется, как группа 2 в качестве единого целого может оптимизировать эти виртуальные рабочие агрегаты 8. Однако в качестве предпочтительного решения уже здесь можно указать, что в каждом случае рабочая машина 3 группы 2 оптимизирует виртуальный рабочий агрегат 8, генерируя для этого оптимизированные параметры машины.
В принципе, может быть предусмотрено, чтобы несколько рабочих машин 3 группы 2 определяли оптимизированные параметры машины для одной части своих рабочих агрегатов 4 и предоставляли эти параметры другим рабочим машинам 3 группы 2. Для другой части их рабочих агрегатов 4 они могут получать оптимизированные параметры машины от других рабочих машин 3 группы 2, которые генерируют эти параметры. Это может осуществляться в качестве альтернативы объединению рабочих агрегатов 4 в виртуальные рабочие агрегаты 8, однако, предпочтительно происходит дополнительно. Так, может быть предусмотрено, чтобы определенные рабочие агрегаты 4 рабочих машин 3 группы 2 были объединены, поскольку соответствующие рабочие машины 3 группы 2 являются одинаковыми и находятся в одной зоне 5 поля, в то время как остальные рабочие машины 3 группы 2 могут принять лишь немногие оптимизированные параметры машины от других рабочих машин 3 группы 2. Так, например, одна рабочая машина 3 группы 2 может временно обрабатывать зону 5 поля с высокой засоренностью сорными растениями, при этом сопоставимость с другими рабочими машинами 3 группы 2 отсутствует или имеется в незначительной степени.
Рабочие машины 3 группы 2 могут непосредственно перенимать оптимизированные параметры машины, принятые от других рабочих машин 3 группы 2, или по меньшей мере частично включать их в свою собственную оптимизацию.
В продолжение вышеуказанного примера, согласно которому некоторые рабочие машины 3 группы 2 не всегда могут быть сравнимы с остальными рабочими машинами 3 группы 2, может быть предусмотрено, чтобы некоторые рабочие машины 3 группы 2 автономно определяли оптимизированные параметры машины для всех своих рабочих агрегатов 4. При этом такое определение осуществляется на основе данных, принятых от других рабочих машин 3 группы 2, в частности, данных датчиков. Эти данные датчиков могут представлять собой виртуальные данные датчиков.
Кроме того, может быть предусмотрено, чтобы рабочие машины 3 группы 2 отдельно или совместно генерировали оптимизированные параметры машины на основе полевых условий. Эти полевые условия могут быть получены из данных датчиков или от внешнего источника. Примерами полевых условий, получаемых от внешнего источника, являются метеорологические данные или спутниковые снимки посевов. Предпочтительно предусмотрено, чтобы полевые условия определялись в различных опорных точках 9 на поле 1. Для того чтобы каждой рабочей машине 3 группы 2 не приходилось объезжать все опорные точки 9 поля 1 для сбора достаточных данных о полевых условиях, предпочтительно предусмотрено, чтобы разные рабочие машины 3 группы 2 объезжали различные опорные точки 9 и определяли в них соответствующие полевые условия. Аналогично данным датчиков может осуществляться обмен данными о полевых условиях или агрегирование виртуальных данных о полевых условиях.
Прежде чем описывать распределение работ в группе 2, следует указать, что рабочие машины 3 группы 2 действуют предпочтительно совместно, наподобие виртуальной рабочей машины, при этом они обмениваются данными рабочего процесса, в частности, с привязкой к местности. Эти данные рабочего процесса могут включать в себя состояние посевов и/или данные о культуре и/или актуальные данные о качестве и производительности рабочих машин 3 группы 2 и/или модели процесса, например, для обработки вышеуказанных полей характеристик.
Для повышения производительности уборки и/или качества урожая группа 2 предпочтительно содержит супервизор процесса управления парком машин, который координирует и/или делегирует генерирование оптимизированных параметров машины. Этот супервизор процесса управления парком машин может быть реализован на отдельной рабочей машине 3 группы 2, на нескольких рабочих машинах 3 группы 2 или также, например, на внешнем сервере или на мобильном устройстве. Термины "координировать" и "делегировать" относятся в данном контексте к распределению задач. При этом супервизор процесса управления парком машин гарантирует, что отдельные рабочие машины 3 группы 2 знают и выполняют свои задачи и, таким образом, координирует их, или супервизор процесса управления парком машин по меньшей мере частично ставит задачи, подлежащие выполнению, а затем делегирует их выполнение.
Супервизор процесса управления парком машин предпочтительно разделяет генерирование оптимизированных параметров машины на задачи оптимизации и распределяет эти задачи оптимизации между несколькими рабочими машинами 3 группы 2. Это является особенно предпочтительным в том случае, если генерирование оптимизированных параметров машины осуществляется для виртуальных рабочих агрегатов 8. Задачи оптимизации распределяются супервизором процесса управления парком машин предпочтительно в соответствии с оснащением рабочей машины 3 группы 2. Это оснащение может относиться к системе 6 помощи водителю соответствующей рабочей машины 3 группы 2. В соответствии с этим задачи оптимизации могут распределяться таким образом, чтобы каждая рабочая машина 3 группы 2, которая имеет для этого лучшие аппаратные средства, выполняла задачу оптимизации. При этом учитывается то обстоятельство, что системы 6 помощи водителю разных рабочих машин 3 группы могут очень сильно отличаться. Системы 6 помощи водителю группы 2 могут быть выполнены даже таким образом, что оптимизация группы 2 возможна только при разделении рабочего процесса, поскольку достаточная вычислительная мощность для автономной оптимизации каждой рабочей машины 3 группы 2 отсутствует. При этом следует указать, что все шаги вычисления в рамках предлагаемого способа предпочтительно выполняются соответствующей системой 6 помощи водителю соответствующей рабочей машины 3 или совместно несколькими системами 6 помощи водителю рабочих машин 3 группы 2.
Рабочие машины 3 группы 2, в принципе, могут начинать взаимодействие спонтанно, однако, предпочтительно, чтобы в начале выполнения сельскохозяйственного рабочего процесса рабочие машины 3 группы 2 выполнили программу синхронизации, которая позволяет сравнивать конфигурации рабочих машин 3 друг с другом и/или определять поправочные коэффициенты для пересчета соответствующих оптимизированных параметров машины между рабочими машинами 3. Так, например, один зерноуборочный комбайн может содержать рабочий агрегат 4, имеющий большие размеры, чем такой же рабочий агрегат 4 другого зерноуборочного комбайна. Эти отличия идентифицируются, и предпочтительно определяется, могут ли оптимизированные параметры машины одной рабочей машины 3 группы 2 при помощи поправочных коэффициентов, которые в широком смысле включают в себя инструкции по корректировке любого рода, быть преобразованы в оптимизированные параметры машины для другой рабочей машины 3 группы 2.
В программе синхронизации может быть также предусмотрено определение противоречий между конфигурациями рабочих машин 3 группы 2, при этом такие противоречия отображаются пользователю и/или автоматически устраняются. Такое противоречие может представлять собой, например, вид культуры, ошибочно установленный для одной из рабочих машин 3 группы 2. Если для всех остальных рабочих машин 3 группы 2 установлен другой вид культуры, это противоречие может быть автоматически устранено. Однако может быть также предусмотрено отображение этого противоречия пользователю, который может реагировать на него.
Для того чтобы дополнительно повысить эффективность взаимодействия группы 2 и даже уменьшить потребность группы 2 в вычислительной мощности, может быть предусмотрено, чтобы перед началом выполнения сельскохозяйственного рабочего процесса выполнялась программа предварительной обработки. Эта программа предпочтительно выполняется на оконечном компьютере 10 за пределами группы 2. Указанный оконечный компьютер может представлять собой компьютер на ферме или также облачный сервер. В программе предварительной обработки предпочтительно определяются поправочные коэффициенты. Дополнительно или альтернативно в программе предварительной обработки может планироваться объезд опорных точек 9. Кроме того, дополнительно или альтернативно оптимизированные параметры машины могут генерироваться на основе модели, в частности, модели процесса, виртуальной рабочей машиной 8, при этом указанная модель создается или параметрируется в программе предварительной обработки. Поскольку сельскохозяйственные рабочие процессы обычно планируются заранее, а также известно, какие рабочие машины 3 должны быть использованы в группе 2, настройка этих рабочих машин может быть произведена заранее.
Во время выполнения сельскохозяйственного рабочего процесса поправочные коэффициенты предпочтительно непрерывно и/или циклически и/или в соответствии с событиями адаптируют на основе данных датчиков, в частности, виртуальных данных датчиков. Из поправочных коэффициентов, в частности, из временной характеристики поправочных коэффициентов, во время выполнения сельскохозяйственного рабочего процесса или предпочтительно в течение более длительного периода времени, или из сравнения поправочных коэффициентов одинаковых рабочих машин 3 можно сделать заключение о потребности рабочей машины 3 в техническом обслуживании. Так, например, необходимость регулярной адаптации может указывать на старение.
В связи с тем, что возможность извлечения данных о прошлой совместной работе сельскохозяйственных машин 3 в группах 2 имеет множество достоинств, данные группы 2 предпочтительно сохранять. Эти сохранения можно осуществлять на рабочих машинах 3 группы 2 и/или за пределами группы. Предпочтительно, чтобы поправочные коэффициенты сохранялись отдельно для каждого вида культуры.
Поправочные коэффициенты предпочтительно определяются на основе справочной информации, собранной от внешних источников относительно рабочих машин 3 группы 2. Такая справочная информация может быть также использована для параметрирования моделей процессов. При этом указанные модели процессов используются системой 6 помощи водителю соответствующей рабочей машины 3 для определения оптимизированных параметров машины. Поправочные коэффициенты могут быть также частью моделей процессов. Так, например, модель процесса может отображать влияние влаги на измельчающий механизм зерноуборочного комбайна. При этом модели процессов могут быть специфическими для каждой рабочей машины или отображать несколько рабочих машин группы 2. Справочная информация может содержать лабораторные данные, в частности, ломкость зерна, содержание белков и другие, и может быть заимствована из предыдущих рабочих процессов.
Поскольку датчики 11 сельскохозяйственных рабочих машин 3 обычно также должны юстироваться и/или калиброваться, может быть предусмотрено, чтобы юстировка и/или калибровка датчиков 11 рабочих машин 3 группы 2 осуществлялась на основе данных датчиков других рабочих машин 3 группы 2. Таким образом, отклонения, вызванные, например, разрегулированностью датчиков из-за их старения, могут быть идентифицированы и откорректированы.
В соответствии с этим возможно также, чтобы при отказе датчика одной рабочей машины 3 группы 2 эта рабочая машина 3 использовала данные датчика по меньшей мере одной другой рабочей машины 3 группы 2 или данные виртуальных датчиков, чтобы по меньшей мере частично компенсировать указанный отказ датчика. Таким образом, можно предотвратить возможный полный выход из строя этой рабочей машины 3.
При выполнении сельскохозяйственного рабочего процесса и/или в программе синхронизации и/или в программе предварительной обработки могут быть использованы данные другой, аналогичной группы. Предпочтительно используют поправочные коэффициенты аналогичной группы, которые далее предпочтительно адаптируют в программе предварительной обработки и/или в программе синхронизации. Так снова осуществляется экономия вычислительной мощности.
Поскольку, как указано выше, некоторые рабочие машины 3 группы 2 иногда не сравнимы с другими рабочими машинами 3 группы 2, например, вследствие работы в зоне 5 поля с высокой засоренностью сорными растениями или в низине с высокой влажностью, предпочтительно предусмотреть, чтобы вклад одной рабочей машины в виртуальную рабочую машину мог быть приостановлен пользователем. Таким пользователем может быть, например, водитель или начальник группы.
Дополнительно или альтернативно группа 2 может содержать систему обеспечения качества, которая может исключать и/или приостанавливать вклады отдельных рабочих машин 3 в виртуальную рабочую машину 8. Для этого система обеспечения качества предпочтительно оценивает вклады рабочей машины 3 в виртуальную рабочую машину 8 по критериям оценки качества и исключает или приостанавливает соответствующий вклад на основе критериев оценки качества. Эти критерии оценки качества могут относиться к оснащению рабочей машины 3 группы 2 и/или к локальным полевым условиям, в которых находится рабочая машина 3 группы 2.
Как указано выше, пользователь может приостанавливать вклад рабочей машины 3 группы 2 в виртуальную рабочую машину 8. Для этого в самом общем случае предпочтительно предусмотрено, чтобы пользователь мог управлять выполнением сельскохозяйственного процесса и/или проверять его выполнение, в частности, при помощи мобильного устройства.
Поскольку группы 2 сельскохозяйственных рабочих машин 3 содержат сельскохозяйственные рабочие машины 3 частично очень сильно отличающихся типов, которые не всегда могут быть или должны быть оптимизированы совместно, может быть предусмотрено, чтобы рабочие машины 3 группы 2 представляли собой сельскохозяйственные рабочие машины 3 одинакового типа, в частности, зерноуборочные комбайны или кормоуборочные комбайны. При этом они содержат одинаковые рабочие агрегаты 4. В этом случае они могут работать совместно в виде виртуальной рабочей машины 8 этого типа. В качестве альтернативы группа 2 может содержать по меньшей мере одну рабочую машину 3 другого типа, если они совместно выполняют один сельскохозяйственный рабочий процесс, в частности, процесс уборки урожая с поля 1. Так, например, группа может состоять из комбайнов для уборки зерна и перегрузчиков для отгрузки зерна.
В том случае, если объединяются рабочие машины 3 одного типа, может быть предусмотрено, чтобы рабочие машины 3 группы 2 кооперировались по меньшей мере с еще одной группой 2 сельскохозяйственных рабочих машин 3, которые также действуют совместно наподобие виртуальной рабочей машины 8. Эта кооперация может быть выполнена таким образом, чтобы группы 2 взаимодействовали друг с другом наподобие еще одной виртуальной, более абстрактной рабочей машины 8 в виде виртуальной группы виртуальных рабочих машин 8. Так, например, рабочие машины 3 типа зерноуборочного комбайна могут взаимодействовать в виде группы 2, в то время как другая группа 2 может состоять из пере грузчиков. Каждая из этих групп может быть объединена в виртуальную рабочую машину 8, а затем обе виртуальные рабочие машины 8 могут, в свою очередь, совместно действовать наподобие виртуальной рабочей машины 8 более высокого уровня. При этом группа 2 зерноуборочных комбайнов координировала бы уборку урожая с поля, группа 2 перегрузчиков - отгрузку урожая, а группа более высокого уровня - взаимодействие групп 2.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Поле
2 Группа
3 Сельскохозяйственная рабочая машина
4 Рабочий агрегат
5 Зона поля
6 Система помощи водителю
7 Виртуальная рабочая машина
8 Виртуальный рабочий агрегат
9 Опорная точка
10 Оконечный компьютер
11 Датчик
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОСУЩЕСТВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО УБОРОЧНОГО ПРОЦЕССА | 2018 |
|
RU2765084C2 |
| Сельскохозяйственная машина | 2018 |
|
RU2756137C2 |
| КОЛЕСНЫЙ ТЯГАЧ, СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ И СПОСОБ ЭКСПЛУАТАЦИИ КОЛЕСНОГО ТЯГАЧА | 2020 |
|
RU2812028C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ТЯГАЧ | 2020 |
|
RU2821862C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА | 2018 |
|
RU2768726C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2019 |
|
RU2796063C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ СИСТЕМЫ "АССИСТЕНТ ВОДИТЕЛЯ" ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2566990C9 |
| СИСТЕМА "АССИСТЕНТ ВОДИТЕЛЯ" ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2010 |
|
RU2533922C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ СИСТЕМЫ "АССИСТЕНТ ВОДИТЕЛЯ" ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2566658C9 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАШИННЫЙ АГРЕГАТ | 2017 |
|
RU2749615C2 |
Изобретение относится к области сельского хозяйства. В способе выполняют сельскохозяйственный рабочий процесс в поле при помощи группы сельскохозяйственных рабочих машин. При этом каждая из рабочих машин группы содержит рабочие агрегаты, для которых предусмотрена возможность установки параметров машины для адаптации к соответствующим сельскохозяйственным условиям. Рабочие машины группы сообщаются друг с другом при помощи беспроводной сети передачи данных и выполнены в виде самооптимизирующихся рабочих машин, каждая из которых содержит систему помощи водителю для автоматического генерирования и установки параметров машины, оптимизированных применительно к сельскохозяйственным условиям. Рабочие машины группы действуют совместно наподобие виртуальной рабочей машины так, что результаты самооптимизации в виде оптимизированных параметров рабочих машин группы снова возвращаются в группу для дальнейшего применения другими рабочими машинами группы. Причем группа содержит супервизор процесса управления парком машин, который координирует и/или делегирует генерирование оптимизированных параметров машины. Для виртуальных рабочих агрегатов супервизор процесса управления парком машин разделяет генерирование оптимизированных параметров машины на задачи оптимизации и распределяет эти задачи оптимизации между рабочими машинами группы. Причем задачи оптимизации распределяют на основании системы помощи водителю рабочих машин группы. При этом в начале выполнения сельскохозяйственного рабочего процесса рабочие машины группы выполняют программу синхронизации. В программе синхронизации сравнивают конфигурации рабочих машин друг с другом и/или определяют поправочные коэффициенты для пересчета соответствующих оптимизированных параметров машины между рабочими машинами. Определяют противоречия между конфигурациями рабочих машин группы, причем противоречие представляет собой вид культуры, ошибочно установленный для одной из рабочих машин группы, и отображают указанные противоречия пользователю и/или автоматически устраняют их. Способ обеспечивает более гибкое и эффективное выполнение сельскохозяйственных рабочих процессов группами самооптимизирующихся рабочих машин. 16 з.п. ф-лы, 2 ил.
1. Способ выполнения сельскохозяйственного рабочего процесса в поле (1) при помощи группы (2) сельскохозяйственных рабочих машин (3), при этом каждая из рабочих машин (3) группы (2) содержит рабочие агрегаты (4), для которых предусмотрена возможность установки параметров машины для адаптации к соответствующим сельскохозяйственным условиям, при этом рабочие машины (3) группы (2) сообщаются друг с другом при помощи беспроводной сети передачи данных, при этом рабочие машины (3) группы (2) выполнены в виде самооптимизирующихся рабочих машин (3), каждая из которых содержит систему (6) помощи водителю для автоматического генерирования и установки параметров машины, оптимизированных применительно к сельскохозяйственным условиям, отличающийся тем, что рабочие машины (3) группы (2) действуют совместно наподобие виртуальной рабочей машины (7) так, что результаты самооптимизации в виде оптимизированных параметров рабочих машин (3) группы (2) снова возвращаются в группу (2) для дальнейшего применения другими рабочими машинами (3) группы (2), причем группа содержит супервизор процесса управления парком машин, который координирует и/или делегирует генерирование оптимизированных параметров машины, для виртуальных рабочих агрегатов (8) супервизор процесса управления парком машин разделяет генерирование оптимизированных параметров машины на задачи оптимизации и распределяет эти задачи оптимизации между рабочими машинами (3) группы (2), причем задачи оптимизации распределяют на основании системы (6) помощи водителю рабочих машин (3) группы (2), при этом в начале выполнения сельскохозяйственного рабочего процесса рабочие машины (3) группы (2) выполняют программу синхронизации, в программе синхронизации сравнивают конфигурации рабочих машин (3) друг с другом и/или определяют поправочные коэффициенты для пересчета соответствующих оптимизированных параметров машины между рабочими машинами (3), определяют противоречия между конфигурациями рабочих машин (3) группы (2), причем противоречие представляет собой вид культуры, ошибочно установленный для одной из рабочих машин (3) группы (2), и отображают указанные противоречия пользователю и/или автоматически устраняют их.
2. Способ по п. 1, отличающийся тем, что каждая из рабочих машин (3) группы (2) генерирует данные датчиков, при этом рабочие машины (3) группы (2) учитывают данные датчиков других рабочих машин (3) группы (2) при генерировании своих оптимизированных параметров машины, и/или рабочие машины (3) группы (2) совместно собирают данные датчиков, которые агрегируются в виртуальные данные датчиков.
3. Способ по п. 1 или 2, отличающийся тем, что каждая из рабочих машин (3) группы (2) содержит одинаковые рабочие агрегаты (4), при этом соответствующие одинаковые рабочие агрегаты (4) объединяют в соответствующий виртуальный рабочий агрегат (8), при этом для указанного соответствующего виртуального рабочего агрегата (8) генерируют оптимизированные параметры машины, которые затем используют указанными рабочими машинами (3) группы (2), которые содержат этот рабочий агрегат (4), для указанного соответствующего рабочего агрегата (4).
4. Способ по одному из предшествующих пунктов, отличающийся тем, что каждая из рабочих машин (3) группы (2) генерирует оптимизированные параметры машины для части своих соответствующих рабочих агрегатов (4) и предоставляет их другим рабочим машинам (3) группы (2), а для другой части своих соответствующих рабочих агрегатов (4) принимает оптимизированные параметры машины, генерированные другими рабочими машинами (3) группы (2), от других рабочих машин (3) группы (2).
5. Способ по одному из предшествующих пунктов, отличающийся тем, что некоторые рабочие машины (3) группы (2) автономно генерируют оптимизированные параметры машины для всех своих рабочих агрегатов (4) на основе данных, в частности данных датчиков, полученных от других рабочих машин (3) группы (2).
6. Способ по одному из предшествующих пунктов, отличающийся тем, что рабочие машины (3) группы (2) по отдельности или совместно генерируют оптимизированные параметры машины на основе полевых условий, причем полевые условия определяют в разных опорных точках (9) поля, при этом предпочтительно разные опорные точки (9) объезжают разными рабочими машинами (3) группы (2), причем указанные соответствующие рабочие машины (3) группы (2) определяют в них соответствующие полевые условия.
7. Способ по одному из предшествующих пунктов, отличающийся тем, что рабочие машины (3) группы (2) действуют совместно наподобие виртуальной рабочей машины (7), обмениваясь данными рабочего процесса, в частности, с привязкой к местности, при этом указанные данные рабочего процесса включают в себя состояние посевов и/или данные о культуре и/или актуальные данные о качестве и производительности рабочих машин группы и/или модели процесса.
8. Способ по одному из предшествующих пунктов, отличающийся тем, что перед началом выполнения сельскохозяйственного рабочего процесса выполняют программу предварительной обработки, в частности, на оконечном компьютере за пределами группы (2), при этом предпочтительно в программе предварительной обработки определяют поправочные коэффициенты, и/или в программе предварительной обработки планируют объезд опорных точек (9), и/или генерируют оптимизированные параметры машины на основе модели виртуальной рабочей машины (7), и при этом в программе предварительной обработки создают или параметрируют указанную модель.
9. Способ по п. 8, отличающийся тем, что во время выполнения сельскохозяйственного рабочего процесса непрерывно и/или циклически и/или в соответствии с событиями адаптируют поправочные коэффициенты на основе данных датчиков, в частности виртуальных данных датчиков, при этом предпочтительно на основании поправочных коэффициентов делают заключение о потребности рабочей машины (3) в техническом обслуживании.
10. Способ по п. 8 или 9, отличающийся тем, что поправочные коэффициенты определяют на основе справочной информации, собранной от внешних источников относительно рабочих машин (3) группы (2), причем справочная информация включает лабораторные данные, в частности ломкость зерна, содержание белков, и может быть заимствована из предыдущих рабочих процессов.
11. Способ по одному из пп. 2-10, отличающийся тем, что датчики (11) рабочих машин (3) группы (2) юстируют и/или калибруют на основе данных датчиков других рабочих машин (3) группы (2).
12. Способ по одному из предшествующих пунктов, отличающийся тем, что при отказе датчика рабочей машины (3) группы (2) эта рабочая машина (3) использует данные датчиков по меньшей мере одной другой рабочей машины (3) группы (2) или виртуальные данные датчиков, чтобы по меньшей мере частично компенсировать указанный отказ датчика.
13. Способ по одному из предшествующих пунктов, отличающийся тем, что при выполнении сельскохозяйственного рабочего процесса и/или в программе синхронизации и/или в программе предварительной обработки используют данные другой аналогичной группы (2), при этом предпочтительно используют поправочные коэффициенты аналогичной группы (2), а также предпочтительно адаптируют поправочные коэффициенты аналогичной группы (2) в программе предварительной обработки и/или в программе синхронизации.
14. Способ по одному из предшествующих пунктов, отличающийся тем, что вклад рабочей машины (3) в виртуальную рабочую машину (7) может быть приостановлен пользователем.
15. Способ по одному из предшествующих пунктов, отличающийся тем, что группа (2) содержит систему обеспечения качества, которая может исключать и/или приостанавливать вклады рабочей машины (3) группы (2) в виртуальную рабочую машину (7), при этом предпочтительно система обеспечения качества оценивает вклады отдельных рабочих машин (3) группы (2) в виртуальную рабочую машину (7) по критериям качества и на основе указанных критериев качества исключает или приостанавливает их, причем предпочтительно критерии качества относятся к оснащению рабочей машины (3) группы (2) и/или к локальным полевым условиям рабочей машины (3) группы (2).
16. Способ по одному из предшествующих пунктов, отличающийся тем, что пользователь, в частности, при помощи мобильного устройства, может управлять выполнением сельскохозяйственного процесса и/или проверять его.
17. Способ по одному из предшествующих пунктов, отличающийся тем, что рабочие машины (3) группы (2) кооперируют по меньшей мере с еще одной группой (2) сельскохозяйственных рабочих машин (3), которые также действуют совместно наподобие виртуальной рабочей машины (7), при этом предпочтительно группы (2) действуют совместно наподобие еще одной виртуальной рабочей машины (7) в виде виртуальной группы виртуальных рабочих машин (7).
| КАРМАННЫЙ ФОНАРЬ | 1993 |
|
RU2110012C1 |
| DE 102017110159 A1, 15.11.2018 | |||
| DE 4322293 A1, 12.01.1995 | |||
| US 2015302305 A1, 22.10.2015 | |||
| СПОСОБ ЭКСПЛУАТАЦИИ СИСТЕМЫ "АССИСТЕНТ ВОДИТЕЛЯ" ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2566658C9 |
