Область техники, к которой относится изобретение
Настоящее изобретение относится к колесному тягачу, в частности, к трактору, согласно ограничительной части пункта 1 формулы изобретения. Кроме того, изобретение относится к системе помощи водителю для применения в колесном тягаче согласно пункту 17 формулы изобретения, а также к способу эксплуатации колесного тягача согласно ограничительной части пункта 18 формулы изобретения.
Уровень техники
Колесный тягач, в частности, сельскохозяйственный колесный тягач в виде трактора, содержит силовой агрегат, а также по меньшей мере одно навесное орудие, адаптированное к колесному тягачу. При этом силовой агрегат содержит по меньшей мере один приводной двигатель, коробку передач, по меньшей мере одно вспомогательное устройство и по меньшей мере один механизм отбора мощности. Для работы приводного двигателя, выполненного в виде двигателя внутреннего сгорания, предусмотрен блок управления двигателем для регулирования частоты вращения, который при управлении ориентируется на поле характеристик расхода топлива, индивидуальное для данного двигателя внутреннего сгорания. Коробка передач содержит блок управления коробкой передач, который обеспечивает возможность установки передаточных чисел или, соответственно, частот вращения двигателя для переключения передач. При помощи устройства управления более высокого уровня частота вращения двигателя или передаточное число могут быть заданы оператором. Колесный тягач может тянуть или толкать адаптированное к нему, т.е. прицепленное, присоединенное или навешенное навесное орудие. Навесное орудие, адаптированное к колесному тягачу, может быть также прикреплено к рамной конструкции колесного тягача. Блок управления двигателем устанавливает рабочую точку в соответствии с заданием оператора при полной нагрузке таким образом, чтобы рабочая точка находилась, либо в области максимальной мощности двигателя, либо в области минимального расхода топлива.
Как правило, оператор не знаком с характеристиками двигателя, поэтому заданная им установка частоты вращения двигателя и/или передаточного числа не соответствует оптимальной рабочей точке. Кроме того, при этом остаются неучтенными другие факторы, оказывающие влияние на общий коэффициент полезного действия силового агрегата.
Из ЕР 0698518 А1 известен способ и блок управления для управления силовым агрегатом сельскохозяйственной рабочей машины согласно ограничительной части пункта 1 формулы изобретения.
Поэтому задача настоящего изобретения заключается в том, чтобы разработать и усовершенствовать колесный тягач указанного вначале типа таким образом, чтобы лучше определять и учитывать сложные взаимосвязи при оптимизации настройки силового агрегата колесного тягача и адаптированного навесного орудия.
Раскрытие сущности изобретения
В части устройства эта задача решена при помощи колесного тягача с признаками, раскрытыми в пункте 1 формулы изобретения. Кроме того, для решения этой задачи предложена система помощи водителю с автоматической системой регулировки предельной нагрузки двигателя (т.е. нагрузки, при которой частота вращения двигателя падает настолько, что необходимо переключить передачу) для применения в колесном тягаче согласно дополнительному независимому пункту 17 формулы изобретения, а также способ эксплуатации колесного тягача согласно дополнительному независимому пункту 18 формулы изобретения.
Согласно пункту 1 формулы изобретения предложен колесный тягач, в частности трактор, с силовым агрегатом, а также по меньшей мере с одним навесным орудием, адаптированным к указанному колесному тягачу, при этом силовой агрегат содержит по меньшей мере один приводной двигатель, коробку передач, по меньшей мере один механизм отбора мощности и по меньшей мере одно вспомогательное устройство. Согласно изобретению колесный тягач отличается тем, что для управления силовым агрегатом содержит систему помощи водителю, которая снабжена вычислительным блоком, блоком памяти и блоком ввода-вывода данных, при этом система помощи водителю содержит также автоматическую систему регулировки предельной нагрузки двигателя, работающую на основе характеристических кривых, и при этом указанная автоматическая система регулировки предельной нагрузки двигателя выполнена с возможностью оптимизированного управления силовым агрегатом в зависимости от выбираемых стратегий управления и/или целевых параметров оптимизации, хранящихся в блоке памяти. Система помощи водителю позволяет оператору колесного тягача обеспечивать оптимизацию управления силовым агрегатом путем выбора стратегии управления и/или одного или нескольких целевых параметров оптимизации без глубоких знаний силового агрегата колесного тягача. При помощи автоматической системы регулировки предельной нагрузки двигателя, работающей на основе характеристических кривых, учитываются взаимосвязи в силовом агрегате в целом, которые оказывают влияние на стратегии управления или на один или несколько целевых параметров оптимизации. При этом в отличие от известного уровня техники должна быть определена не только конкретная рабочая точка для приводного двигателя исключительно при помощи индивидуального поля характеристик потребления топлива, но, кроме того, должны быть также определены и учтены параметры влияния в силовом агрегате, которые оказывают влияние на оптимальную рабочую точку приводного двигателя. Такие параметры влияния могут представлять собой, в частности, характеристики коэффициента полезного действия других компонентов, которые относятся к силовому агрегату. Кроме того, в качестве параметра влияния следует назвать, в частности, потери, зависимые от частоты вращения, которые возникают в силовом агрегате. При помощи автоматической системы регулировки предельной нагрузки двигателя могут быть предпочтительно учтены имеющие место при практической эксплуатации разбросы коэффициентов полезного действия и/или изменяющиеся рабочие характеристики компонентов силового агрегата. Кроме того, могут учитываться имеющие место при практической эксплуатации разбросы коэффициентов полезного действия силового агрегата при различных условиях применения колесного тягача. При помощи колесного тягача согласно изобретению на основе автоматизированной настройки предельной нагрузки двигателя может быть оптимизирована вся система в целом, состоящая из колесного тягача с силовым агрегатом и адаптированным навесным орудием. Вычислительный блок, блок памяти и блок ввода-вывода данных системы помощи водителю могут быть отделены друг от друга в пространстве, т.е. они не обязательно должны быть расположены все вместе на колесном тягаче.
Термин "стратегия управления" означает высокоуровневое задание режима работы колесного тягача, без задания путем выбора одного или нескольких параметров управления. Термин "целевые параметры оптимизации" описывает конкретную целевую установку при задании одного или нескольких параметров управления, которая должна быть достигнута путем управления силовым агрегатом при помощи автоматической системы регулировки предельной нагрузки двигателя. Соответствующий целевой параметр оптимизации образует конкретный элемент стратегии управления, адаптация которого должна быть произведена для достижения и сохранения стратегии управления.
Указанный по меньшей мере один приводной двигатель выполнен в виде двигателя внутреннего сгорания. Силовой агрегат может дополнительно содержать еще один приводной двигатель, выполненный, например, в виде электродвигателя. Коробка передач предпочтительно представляет собой коробку передач, переключаемую под нагрузкой, или бесступенчатую коробку передач. Вспомогательное устройство силового агрегата может быть, например, вентилятором двигателя, гидравлическим насосом или электрическим генератором. В качестве механизма отбора мощности можно рассматривать, в частности, вал отбора мощности, который может служить для привода навесного орудия.
Навесное орудие для колесного тягача может представлять собой, например, транспортный прицеп, грузовую тележку, валкователь, сеноворошилку, косилочный механизм, пресс-подборщик, почвообрабатывающее орудие, полевой опрыскиватель или разбрасыватель удобрений.
Для этого силовой агрегат вместе с системой помощи водителю может образовывать автоматическую систему регулировки предельной нагрузки двигателя, при этом вычислительный блок выполнен с возможностью, для реализации соответствующей выбранной стратегии управления и/или целевых параметров оптимизации, автономного определения параметров силового агрегата и задания их силовому агрегату, предпочтительно приводному двигателю и/или коробке передач. Основу для определения параметров силового агрегата образует выбор одной из стратегий управления или целевых параметров оптимизации, которые сохраняются в блоке памяти системы помощи водителю. При помощи предлагаемой реализации автоматической системы регулировки предельной нагрузки двигателя можно путем однократного выбора оператором стратегии управления или целевых параметров оптимизации задавать способ управления силовым агрегатом. Для определения параметров силового агрегата в более узком смысле дополнительный ввод данных со стороны водителя не требуется, поскольку это осуществляется автономно. Однако оператору может быть предоставлена возможность, например, изменять при желании выбранную стратегию управления и/или целевой параметр оптимизации таким образом, чтобы после этого осуществлялось автономное управление силовым агрегатом, однако, с другой расстановкой приоритетов.
Стратегии управления предпочтительно могут представлять собой стратегии управления, индивидуальные для колесного тягача и/или индивидуальные для навесных орудий.
Возможность выбора стратегии управления может содержать, в частности, по меньшей стратегии управления "Эффективность" или "Производительность". При выборе стратегии управления "Эффективность" осуществляется оптимизация расхода топлива на единицу площади, при этом рабочая точка лежит в n-мерном поле характеристик с учетом параметров силового агрегата в области минимально возможного расхода топлива. При выборе стратегии управления "Производительность" осуществляется оптимизация производительности на единицу площади, при этом рабочая точка лежит в n-мерном поле характеристик с учетом параметров силового агрегата в области максимальной мощности двигателя. Для этого в соответствии с выбранной стратегией управления изменяется частота вращения двигателя при полной нагрузке или величина частоты вращения двигателя для переключения коробки передач с учетом параметров силового агрегата.
Целевые параметры оптимизации могут представлять собой "Производительность на единицу площади", "Расход топлива на единицу площади", "Урожайность на единицу площади", "Расходы на единицу площади" и/или "Качество работы". Целевой параметр оптимизации "Расходы на единицу площади" может учитывать прежде всего, например, возникающие расходы на персонал, расходы на топливо, затраты, связанные с износом оборудования, наработка часов эксплуатации и т.п. Целевой параметр оптимизации "Производительность на единицу площади" может быть направлен в первую очередь, например, на увеличение обрабатываемой площади и/или перерабатываемой массы сельскохозяйственной продукции. Целевой параметр оптимизации "Качество работы" при управлении силовым агрегатом ставит на передний план, например, примесь пожнивных остатков, грануляцию, обратное прикатывание, качество фуража и т.п.
При этом параметрами, подлежащими учету для оптимизированного управления силовым агрегатом, могут быть рабочие параметры силового агрегата, по меньшей мере одного вспомогательного устройства силового агрегата, навесного орудия и/или параметры окружающей среды. Предпочтительно по меньшей мере рабочие параметры силового агрегата и по меньшей мере одного вспомогательного устройства силового агрегата используются для оптимизированного управления, поскольку они в большинстве случаев могут быть зарегистрированы непосредственно на колесном тягаче.
С силовым агрегатом могут быть связаны сенсорные устройства, выполненные с возможностью определения рабочих параметров силового агрегата. При этом одно из указанных сенсорных устройств может представлять собой, например, датчик частоты вращения, датчик крутящего момента, датчик давления или датчик усилия. Сенсорные устройства для определения рабочих параметров силового агрегата непосредственно связаны с силовым агрегатом или его компонентами.
Кроме того, с колесным тягачом и/или с навесным орудием могут быть связаны дополнительные сенсорные устройства, выполненные с возможностью получения информации о работе колесного тягача и/или навесного орудия. При этом одно из таких сенсорных устройств может представлять собой, например, датчик скорости, датчик угла наклона, оптический датчик и/или датчик определения местонахождения.
При этом рабочие параметры силового агрегата могут включать в себя выходную мощность по меньшей мере одного приводного двигателя, выходную мощность коробки передач или степень загрузки коробки передач, приводную мощность по меньшей мере одного вспомогательного устройства и/или по меньшей мере одного механизма отбора мощности, проскальзывание, скорость движения, передаточное число и/или поток мощности в гидравлическом силовом агрегате и/или в опциональном электрическом силовом агрегате.
Кроме того, рабочие параметры навесного орудия могут включать в себя вид и/или тип навесного орудия, положение хода и/или рабочую глубину навесного орудия.
В блоке памяти может быть сохранена, в частности, функциональная модель силового агрегата, которая отображает по меньшей мере часть функциональных взаимосвязей силового агрегата. Так, при помощи функциональной модели возможно моделирование различных рабочих ситуаций колесного тягача, чтобы в соответствующей рабочей ситуации с учетом выбранной стратегии управления и/или одного или нескольких целевых параметров оптимизации обеспечивать оптимизированное управление силовым агрегатом при помощи автоматической системы регулировки предельной нагрузки двигателя. В качестве альтернативы возможно также использование чистых моделей черного ящика, которые основаны, например, на искусственном интеллекте (ИИ) или на нейронных сетях, или смешанных форм, чтобы отображать по меньшей мере часть функциональных взаимосвязей силового агрегата.
Для отображения функциональных взаимосвязей силового агрегата к рабочему параметру "предельная нагрузка двигателя" может быть предпочтительно отнесено по меньшей мере одно n-мерное поле характеристик, при этом предельная нагрузка двигателя определяется как выходной параметр по меньшей мере одного n-мерного поля характеристик. При помощи по меньшей мере одного n-мерного поля характеристик можно отображать также сложные функциональные взаимосвязи с малыми вычислительными затратами. Характеристические кривые n-мерного поля характеристик могу быть адаптивно приспособлены к соответствующей ситуации, чтобы в целом учитывать в силовом агрегате взаимосвязи, которые оказывают влияние на стратегии управления или на один или несколько целевых параметров оптимизации. При этом адаптация характеристических кривых осуществляется при помощи автоматической системы регулировки предельной нагрузки двигателя.
Кроме того, по меньшей мере один или несколько рабочих параметров силового агрегата и по меньшей мере одного вспомогательного устройства силового агрегата могут представлять собой входные параметры по меньшей мере одного n-мерного поля характеристик. Так, в качестве входных параметров могут быть предусмотрены рабочие параметры, в частности, выходная мощность по меньшей мере одного приводного двигателя, выходная мощность коробки передач, степень загрузки коробки передач, приводная мощность по меньшей мере одного вспомогательного устройства и/или по меньшей мере одного механизма отбора мощности, проскальзывание, поток мощности в силовом агрегате вспомогательного устройства и/или поток мощности в гидравлическом силовом агрегате и/или в электрическом силовом агрегате.
Вычислительный блок может предпочтительно выбирать по меньшей мере одно n-мерное поле характеристик в зависимости от выбранной стратегии управления и/или одного или нескольких целевых параметров оптимизации и брать его за основу определения предельной нагрузки двигателя.
Согласно одному предпочтительному усовершенствованию вычислительный блок во время работы может сравнивать по меньшей мере одно n-мерное поле характеристик, в частности циклически, с условиями эксплуатации колесного тягача, при этом предпочтительно, чтобы в блоке памяти сохранялось по меньшей мере одно n-мерное начальное поле характеристик, и чтобы при первом определении предельной нагрузки двигателя вычислительный блок осуществлял определение на основе начального поля характеристик.
При этом вычислительный блок может быть выполнен с возможностью адаптации отображения начального поля характеристик к текущим условиям применения путем использования измеренных параметров силового агрегата или начала работы с опорных точек в начальном поле характеристик. Если в n-мерном пространстве начального поля характеристик измеренные параметры отсутствуют или присутствуют только в недостаточном количестве, и в стандартном режиме работы силового агрегата не используются, вместо них могут быть использованы опорные точки. Исходя из начального поля характеристик, путем установки предварительно определенных рабочих точек можно представить в поле характеристик опорные точки, которые адаптируют отображение поля характеристик к текущим условиям применения.
Во время работы колесного тягача точное отображение по меньшей мере одного n-мерного поля характеристик путем определения по меньшей мере одного параметра, нанесенного в поле характеристик, может быть адаптировано к текущим условиям применения. В процессе работы колесного тягача происходят сильные колебания условий применения, которые могут незамедлительно регистрироваться и учитываться при помощи автоматической системы регулировки предельной нагрузки двигателя, чтобы оптимизировать работу согласно выбранной стратегии управления и/или одному или нескольким целевым параметрам оптимизации. Термин "незамедлительно" означает, что автоматическая система регулировки предельной нагрузки двигателя может реагировать на изменения в течение нескольких секунд.
Знание поля характеристик позволяет автоматической системе регулировки предельной нагрузки двигателя для автоматической установки предельной нагрузки двигателя устанавливать предельную нагрузку двигателя таким образом, чтобы оптимизировать работу силового агрегата в соответствии с выбранной стратегией управления и/или одним или несколькими целевыми параметрами оптимизации. При этом предельная нагрузка двигателя образует управляющий параметр.
Кроме того, вышеуказанная задача решена при помощи системы помощи водителю с автоматической системой регулировки предельной нагрузки двигателя для применения в колесном тягаче по одному из пунктов 1-16 формулы изобретения.
Вышеуказанная задача решена также при помощи способа эксплуатации колесного тягача с признаками, раскрытыми в дополнительном независимом пункте 18 формулы изобретения.
Согласно дополнительному независимому пункту 18 формулы изобретения предлагается способ эксплуатации колесного тягача, в частности трактора, с силовым агрегатом, а также по меньшей мере с одним навесным орудием, адаптированным к колесному тягачу, при этом силовой агрегат содержит по меньшей мере один приводной двигатель, коробку передач, по меньшей мере одно вспомогательное устройство и по меньшей мере один механизм отбора мощности, при этом управление силовым агрегатом осуществляют посредством системы помощи водителю колесного тягача, которая включает в себя вычислительный блок, блок памяти и блок ввода-вывода данных, при этом управление силовым агрегатом осуществляют посредством работающей на основе характеристических кривых автоматической системы регулировки предельной нагрузки двигателя системы помощи водителю, при этом для оптимизированной работы силового агрегата управление посредством автоматической системы регулировки предельной нагрузки двигателя осуществляют в зависимости от сохраненных в блоке памяти выбираемых стратегий управления и/или целевых параметров оптимизации. Благодаря этому способу, вся система, состоящая из колесного тягача с силовым агрегатом и адаптированного навесного орудия, может быть оптимизирована в целом на основе настройки предельной нагрузки двигателя. При этом в указанном способе предпочтительно учитываются также встречающиеся на практике разбросы коэффициентов полезного действия и/или рабочих характеристик различных компонентов силового агрегата, которые включают в себя мощность, передаваемую приводным двигателем на силовой агрегат на одном конце, и тяговую мощность, доступную на другом конце силового агрегата.
Краткое описание чертежей
Ниже приведено более подробное описание настоящего изобретения при помощи варианта его осуществления со ссылками на прилагаемые чертежи, на которых показаны:
ФИГ. 1 - схематическое изображение колесного тягача и навесного орудия, адаптированного к колесному тягачу;
ФИГ. 2 - схематическое изображение силового агрегата колесного тягача;
ФИГ. 3 - подробный вид системы помощи водителю колесного тягача;
ФИГ. 4 - пример n-мерного поля 42 характеристик для управления силовым агрегатом колесного тягача; и
ФИГ. 5 - пример начального поля характеристик, адаптируемого в соответствии с изменением рабочего параметра силового агрегата.
Осуществление изобретения
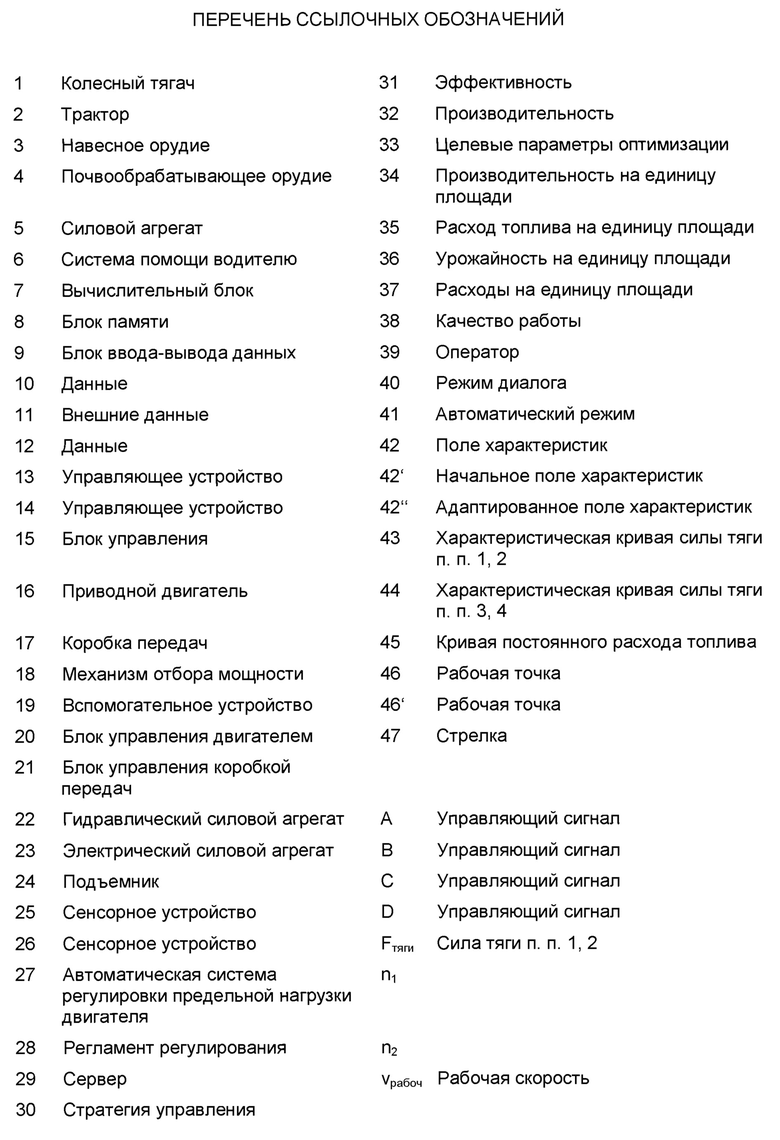
Скомпонованная сельскохозяйственная машина, представленная на ФИГ. 1, содержит колесный тягач 1, выполненный в виде трактора 2, и по меньшей мере одно навесное орудие 3, адаптированное к колесному тягачу 1. Навесное орудие 3 в показанном варианте осуществления представляет собой почвообрабатывающее орудие 4, в данном случае, так называемый, культиватор. Однако в рамках изобретения навесное орудие 3 может быть любым навесным орудием, как, например, транспортным прицепом, грузовой тележкой, валкователем, сеноворошилкой, косилочным механизмом, пресс-подборщиком, иными почвообрабатывающими орудиями, в частности, плугом, полевым опрыскивателем или разбрасывателем удобрений. Колесный тягач 1 содержит силовой агрегат 5, который схематически показан на ФИГ. 2. Как более подробно описано ниже, в колесном тягаче 1 для управления силовым агрегатом 5 предусмотрена система 6 помощи водителю. Система 6 помощи водителю согласно изобретению содержит по меньшей мере вычислительный блок 7, блок 8 памяти и блок 9 ввода-вывода данных. Вычислительный блок 7 обрабатывает данные 10, генерируемые внутренними машинными сенсорными устройствами 25, 26 колесного тягача 1 и/или навесного орудия 3, внешние данные 11 и данные 12, которые могут сохраняться в вычислительном блоке 7. Кроме того, для колесного тягача 1 и навесного орудия 3 предусмотрено одно или несколько управляющих устройств 13, 14, которые предназначены для управления и регулирования колесного тягача 1 и/или соответствующего навесного орудия 3. В рамках изобретения предусмотрено, что колесный тягач 1 и навесное орудие 3 имеют, либо отдельные управляющие устройства 13, 14 для управления, либо общий блок 15 управления. При этом общий блок 15 управления может быть установлен на колесном тягаче 1 или на навесном орудии 3. В рамках изобретения предусмотрено также, что блок 9 ввода-вывода данных может быть также выполнен мобильным с возможностью перемещения оператором колесного тягача 1. Возможна также работа системы 6 помощи водителю в удаленном режиме с дистанционным доступом. Система 6 помощи водителю может быть также выполнена на основе облака данных, при этом данные сохраняются с возможностью вызова и редактирования не в блоке 8 памяти, а по меньшей мере частично во внешнем, удаленным запоминающем устройстве внешнего сервера 29.
Система 6 помощи водителю содержит работающую на основе характеристических кривых автоматическую систему 27 регулировки предельной нагрузки двигателя, которая обеспечивает оптимизацию работы силового агрегата колесного тягача 1. В простейшем случае это осуществляется таким образом, что автоматическая система 27 регулировки предельной нагрузки двигателя генерирует управляющие сигналы А, которые подаются по меньшей мере на управляющее устройство 13 или на блок 15 управления колесного тягача 1 и обеспечивают там управление компонентами силового агрегата 5 колесного тягача 1 путем генерирования соответствующих управляющих сигналов В, С, D.
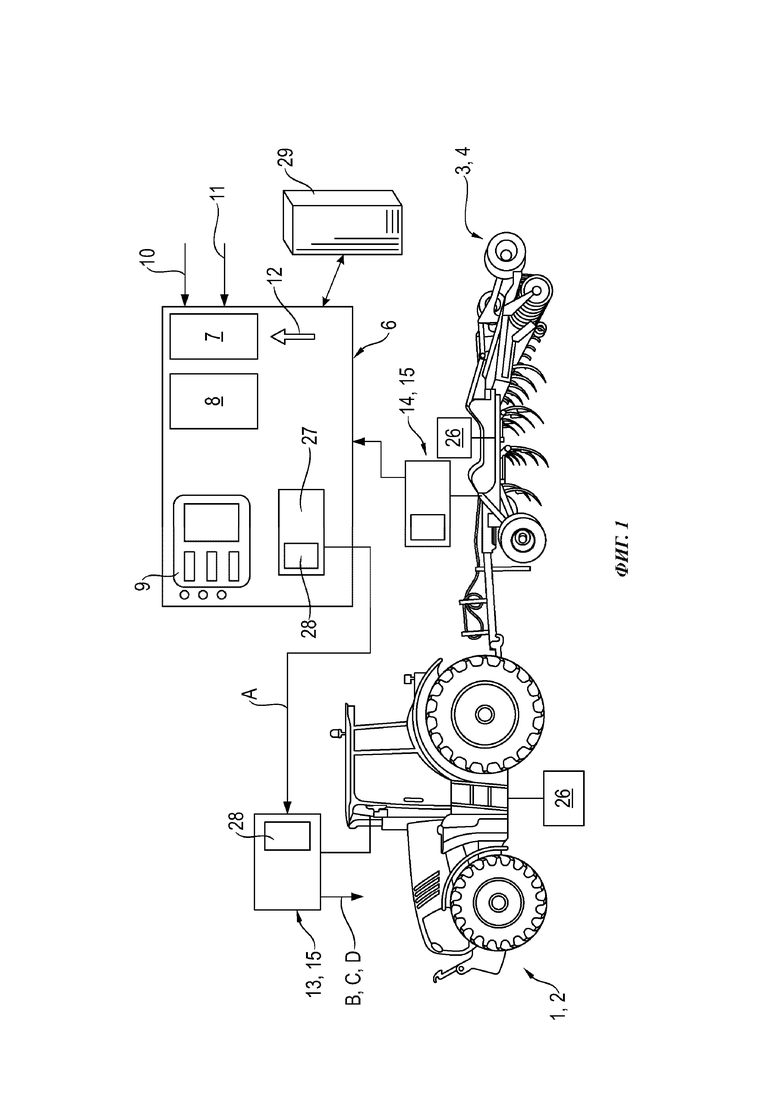
На ФИГ. 2 схематически представлен силовой агрегат 5 колесного тягача 1. Силовой агрегат 5 содержит по меньшей мере один приводной двигатель 16, коробку 17 передач, по меньшей мере один механизм 18 отбора мощности и по меньшей мере одно вспомогательное устройство 19. Приводной двигатель 16 выполнен в виде двигателя внутреннего сгорания. Приводным двигателем 16 управляет блок 20 управления двигателем. Коробка 17 передач представляет собой коробку передач, переключаемую под нагрузкой, или бесступенчатую коробку передач. Коробкой 17 передач управляет блок 21 управления коробкой передач. Указанный по меньшей мере один механизм 18 отбора мощности выполнен в виде вала отбора мощности, который служит приводом навесного орудия 3. Указанное по меньшей мере одно вспомогательное устройство 19 может представлять собой вентилятор двигателя, который является частью системы охлаждения приводного двигателя 16. Кроме того, силовой агрегат 5 может содержать гидравлический силовой агрегат 22 и/или электрический силовой агрегат 23. При этом, например, гидравлический насос и гидравлический двигатель или генератор и электрический двигатель могут образовывать дополнительные вспомогательные устройства силового агрегата 5. Гидравлический силовой агрегат 22 служит, например, для приведения в действие подъемника 24, при помощи которого навесное орудие 3 адаптируют к колесному тягачу 1.
Силовой агрегат 5 связан с сенсорными устройствами 25, выполненными с возможностью определения рабочих параметров силового агрегата 5 или его различных компонентов. При этом указанные сенсорные устройства 25 могут представлять собой, например, датчик частоты вращения, датчик крутящего момента, датчик давления или датчик усилия. Сенсорные устройства 25 для определения рабочих параметров силового агрегата 5 непосредственно связаны с силовым агрегатом 5. Кроме того, колесный тягач 1 и/или навесное орудие 3 могут быть связаны с дополнительными сенсорными устройствами 26, выполненными с возможностью определения индивидуальных рабочих параметров колесного тягача 1 и/или навесного орудия 3. При этом одно из дополнительных сенсорных устройств 26 может представлять собой, например, датчик скорости, датчик угла наклона, оптический датчик и/или датчик определения местонахождения. Кроме того, по меньшей мере одно из дополнительных сенсорных устройств 26 может быть выполнено с возможностью приема и/или определения спутниковой или поддерживаемой спутником информации, такой как геоданные или данные о растительном покрове. Сенсорные устройства 25 силового агрегата, как и дополнительные сенсорные устройства 26 колесного тягача 1 и/или навесного орудия 3 передают генерированные данные 10 опосредованно или непосредственно в систему 6 помощи водителю. Вычислительный блок 7 выполнен с возможностью обработки данных 10. Связь между блоком 20 управления двигателем, блоком 21 управления коробкой передач, сенсорными устройствами 25, 26, а также отдельными управляющие устройствами 13, 14 или блоком 15 управления и системой 6 помощи водителю может осуществляться при помощи различных каналов передачи данных, например, системы шин колесного тягача 1 или навесного орудия 3 или системы беспроводной связи.
Силовой агрегат 5 вместе с системой 6 помощи водителю образует автоматическую систему 27 регулировки предельной нагрузки двигателя. При этом система 6 помощи водителю может содержать регламент 28 регулирования, связанный с автоматической системой 27 регулировки предельной нагрузки двигателя, который обеспечивает оптимизацию режима работы колесного тягача 1. Кроме того, в рамках изобретения предусмотрено, чтобы регламент 28 регулирования для оптимизации режима работы силового агрегата 5 сохранялся в управляющем устройстве 13, связанном с колесным тягачом 1 и предпочтительно выполненном в виде рабочего компьютера. Кроме того, в рамках изобретения предусмотрено, чтобы необходимый регламент 28 регулирования также централизованно сохранялся на внешнем сервере 29, не поясняемом подробнее, или в другой системе серверного уровня, например, на основе облака данных, с возможностью доступа по каналу связи между колесным тягачом 1 и сервером 29.
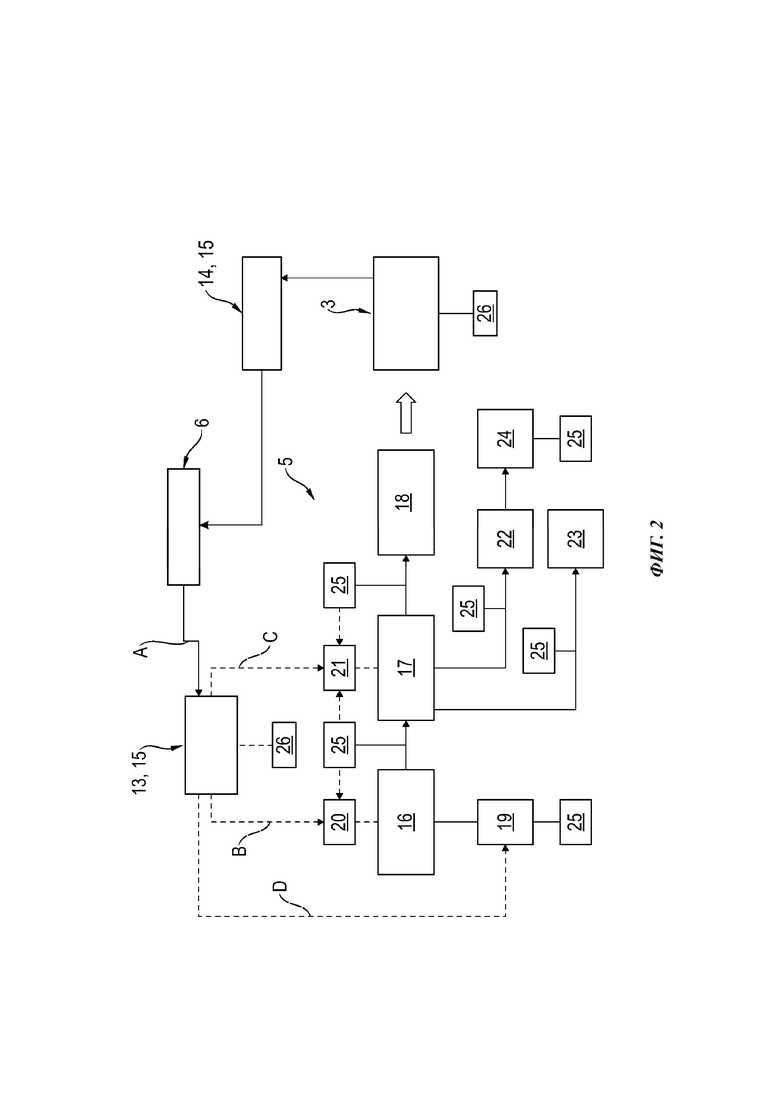
На ФИГ. 3 показан подробный вид системы 6 помощи водителю колесного тягача 1 или, соответственно, трактора 2, при этом визуальный, эксплуатационный и конструктивный аспекты объединены на одном чертеже. Для оптимизации режима работы силового агрегата 5 колесного тягача 1 система 6 помощи водителю содержит выбираемые стратегии 30 управления, которые представляют собой стратегии, индивидуальные для колесного тягача, стратегии, индивидуальные для навесного орудия, и/или комбинацию из двух указанных стратегий. Эффективная оптимизация силового агрегата 5 колесного тягача 1 с учетом адаптированного навесного орудия 3 получается в том случае, если выбираемые стратегии 30 управления включают в себя по меньшей мере одну из стратегий управления "Эффективность" 31 или "Производительность" 32. При выборе стратегии управления "Эффективность" 31 осуществляется оптимизация расхода топлива на единицу площади, т.е. приводной двигатель 16 работает в области минимально возможного расхода топлива с учетом всех компонентов силового агрегата 5 в целом. При выборе стратегии управления "Производительность" 32 осуществляется оптимизация производительности на единицу площади, при этом рабочая точка с учетом параметров силового агрегата 5 лежит в области максимальной мощности двигателя.
Кроме того, система 6 помощи водителю для оптимизации режима работы силового агрегата 5 колесного тягача 1 содержит выбираемые целевые параметры 33 оптимизации. Целевые параметры 33 оптимизации могут быть выбраны оператором 39 альтернативно или дополнительно к стратегии 30 управления.
Система 6 помощи водителю может быть также выполнена таким образом, чтобы она могла работать в режиме 40 диалога с оператором 39 или в автоматическом режиме 41. В обоих случаях взаимодействия диалог с оператором 39 происходит на естественном языке.
Целевые параметры 33 оптимизации могут представлять собой "Производительность на единицу площади" 34, "Расход топлива на единицу площади" 35, "Урожайность на единицу площади" 36, "Расходы на единицу площади" 37 и/или "Качество работы" 38. Целевой параметр 33 оптимизации "Производительность на единицу площади" 34 может быть в первую очередь направлен, например, на увеличение обрабатываемой площади и и/или перерабатываемой массы сельскохозяйственной продукции в единицу времени (га/ч). Целевой параметр 33 оптимизации "Расход топлива на единицу площади" 35 направлен на минимизацию расхода топлива на единицу площади (л/га). Целевой параметр 33 оптимизации "Урожайность на единицу площади" 36 направлен на максимизацию урожайности. Целевой параметр 33 оптимизации "Расходы на единицу площади" 37 может учитывать прежде всего, например, возникающие расходы на персонал, расходы на топливо, затраты, связанные с износом оборудования, наработка часов эксплуатации и т.п.Целевой параметр 33 оптимизации "Качество работы" 38 при управлении силовым агрегатом 5 ставит на передний план, например, примесь пожнивных остатков, грануляцию, обратное прикатывание, качество фуража и т.п.
Силовой агрегат 5 вместе с системой 6 помощи водителю образует автоматическую систему 27 регулировки предельной нагрузки двигателя, при этом вычислительный блок 7 системы 6 помощи водителю выполнен с возможностью, для реализации соответствующей выбранной стратегии 30 управления и/или целевых параметров 33 оптимизации, автономного определения параметров силового агрегата 5 и задания их силовому агрегату 5, предпочтительно приводному двигателю 16 и/или коробке 17 передач. Это может быть реализовано путем передачи управляющих сигналов А в управляющее устройство 13 или в блок 15 управления, которые затем передают соответствующие управляющие сигналы В, С в блок 20 управления двигателем и/или в блок 21 управления коробкой передач.
Автоматическая система 27 регулировки предельной нагрузки двигателя выполнена с возможностью оптимизированного управления силовым агрегатом 5 в зависимости от выбираемых стратегий 30 управления и/или целевых параметров 33 оптимизации, сохраненных в блоке 8 памяти. Автоматическая система 27 регулировки предельной нагрузки двигателя системы 6 помощи водителю работает на основе характеристических кривых. Для этого в блоке 8 памяти сохранено по меньшей мере одно n-мерное поле 42 характеристик, которое более подробно поясняется ниже со ссылками на ФИГ. 4. Указанное по меньшей мере одно n-мерное поле 42 характеристик является частью регламента 28 регулирования. При этом автоматическая система 27 регулировки предельной нагрузки двигателя изменяет частоту вращения двигателя или предельную нагрузку n1, n2 двигателя при полной нагрузке или частоту вращения двигателя для переключения коробки передач и при этом задает "Расход топлива на единицу площади" 35 - величину расхода топлива на единицу площади (л/га) - и/или "Производительность на единицу площади" 34 - величину площади, обрабатываемой в час (га/ч) - при помощи частоты вращения двигателя при полной нагрузке или величины частоты вращения двигателя для переключения коробки передач. При этом сигналы, полученные от сенсорных устройств 25, в частности, частота вращения двигателя или предельная нагрузка n1, n2 двигателя, обрабатываются автоматической системой 27 регулировки предельной нагрузки двигателя и сохраняются в n-мерном поле 42 характеристик.
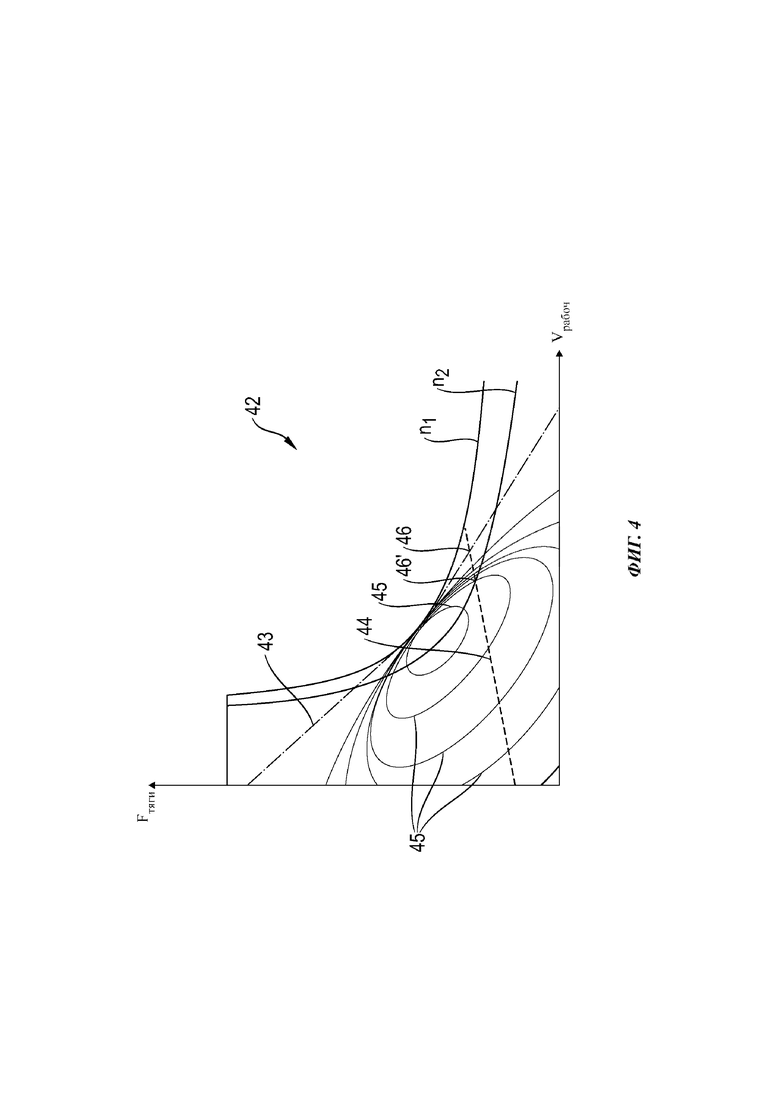
На ФИГ. 4 показан пример n-мерного поля 42 характеристик для управления силовым агрегатом 5. В блоке 8 памяти сохранена функциональная модель силового агрегата 5, которая отображает по меньшей мере часть функциональных взаимосвязей силового агрегата 5. Возможно также использование чистых моделей черного ящика, которые основаны, например, на искусственном интеллекте (ИИ) или на нейронных сетях, или смешанных форм, чтобы отображать по меньшей мере часть функциональных взаимосвязей силового агрегата 5. Для отображения функциональных взаимосвязей силового агрегата 5 рабочий параметр "Предельная нагрузка n1, n2 двигателя" соотнесен по меньшей мере с одним n-мерным полем 42 характеристик, при этом предельная нагрузка n1, n2 двигателя определена как выходной параметр по меньшей мере одного n-мерного поля 42 характеристик.
В поле 42 характеристик в качестве входных параметров представлены сила Fтяги тяги относительно рабочей скорости Vрабоч. Выходной параметр образован предельной нагрузкой n1, n2 двигателя. Кроме того, ссылочным номером 43 обозначена характеристическая кривая силы тяги колесного тягача, а ссылочным номером 44 - характеристическая кривая силы тяги навесного орудия 3, которые представлены в поле 42 характеристик в качестве примеров. Кроме того, на заднем плане показаны кривые 45 постоянного удельного расхода топлива в виде, так называемых, конхоид. Точка пересечения характеристической кривой 44 силы тяги навесного орудия 3 и характеристической кривой 43 силы тяги колесного тягача 1 определяет рабочую точку 46, которая получается при полной нагрузке при различных установках предельной нагрузки двигателя. Кривые 45 постоянного удельного расхода топлива могут быть рассчитаны при известной конструкции силового агрегата 5 для конкретного режима работы. Конкретный режим работы может быть задан рабочими параметрами силового агрегата 5, по меньшей мере одного вспомогательного устройства 19 силового агрегата 5, навесного орудия 3 и/или параметрами окружающей среды. Рабочие параметры силового агрегата 5, по меньшей мере одного вспомогательного устройства 19, навесного орудия 3, гидравлического силового агрегата 22, электрического силового агрегата 23 и/или параметры окружающей среды образуют параметры, подлежащие учету при оптимизированном управлении силовым агрегатом 5.
Рабочие параметры силового агрегата 5 включают в себя выходную мощность по меньшей мере одного приводного двигателя 16, выходную мощность коробки 17 передач или степень загрузки коробки передач, приводную мощность по меньшей мере одного вспомогательного устройства 19 и/или по меньшей мере одного механизма 18 отбора мощности, проскальзывание, скорость движения, передаточное число и/или поток мощности в силовом агрегате механизма 18 отбора мощности, в гидравлическом силовом агрегате 22 или в электрическом силовом агрегате 23. Так, например, приводную мощность по меньшей мере одного вспомогательного устройства 19 можно определить из разности выходной мощности приводного двигателя 16 и выходной мощности коробки 17 передач с учетом поля характеристик коэффициента полезного действия коробки передач.
Кроме того, рабочие параметры навесного орудия 3 могут содержать вид и/или тип навесного орудия 3, положение хода и/или рабочую глубину навесного орудия 3.
При стратегии управления "Эффективность" осуществляется оптимизация расхода топлива на единицу площади, при этом рабочая точка 46 лежит в n-мерном поле 42 характеристик с учетом параметров силового агрегата 5 в области минимально возможного удельного расхода топлива. При стратегии управления "Производительность" производится оптимизация производительности на единицу площади, при этом рабочая точка 46 лежит в n-мерном поле 42 характеристик с учетом параметров силового агрегата 5 в области максимальной мощности двигателя. Для этого в соответствии с выбранной стратегией управления изменяется предельная нагрузка n1, n2 двигателя при полной нагрузке или частота вращения двигателя при переключении коробки 17 передач с учетом параметров силового агрегата 5.
Согласно полю 42 характеристик, показанному в качестве примера на ФИГ. 4, при помощи автоматической системы 27 регулировки предельной нагрузки двигателя целевой параметр оптимизации "Расход топлива на единицу площади" оптимизируется таким образом, чтобы частота n1 вращения двигателя переключалась на частоту n2 вращения двигателя и при этом устанавливалась рабочая точка 46', которая лежит на характеристической кривой 44 требуемой силы тяги навесного орудия 3 при полной нагрузке ближе к области минимально возможного удельного расхода топлива в поле 42 характеристик.
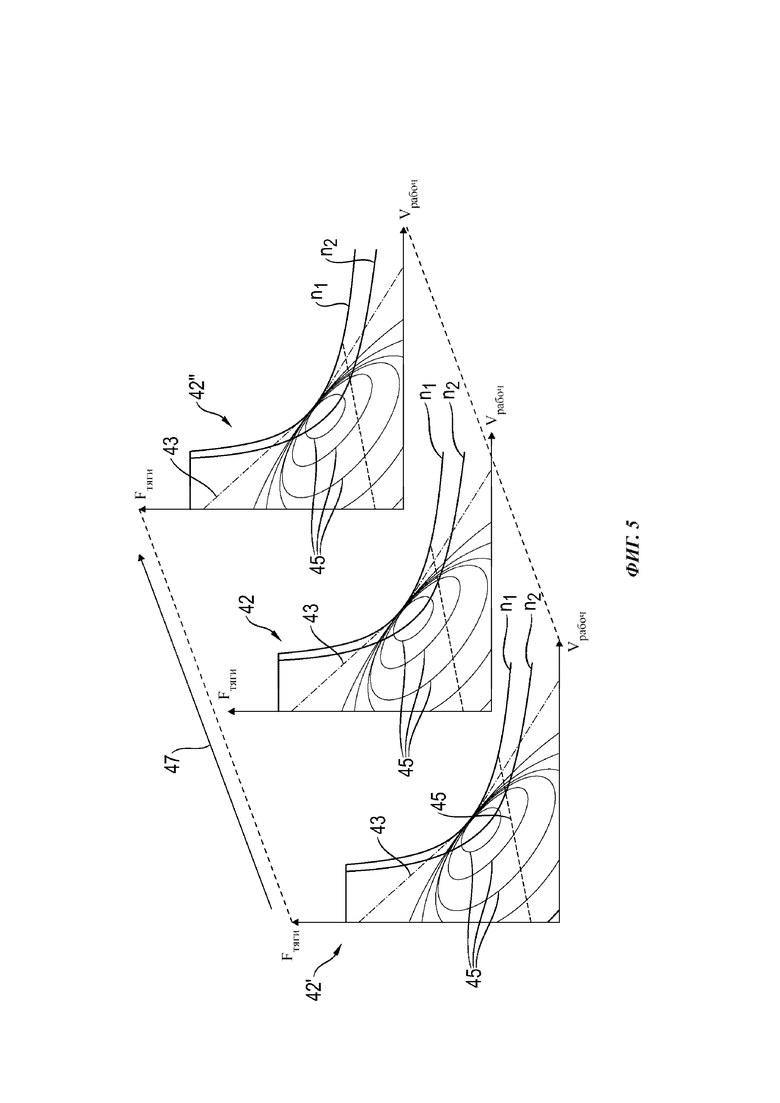
Вычислительный блок 7 может во время работы, в частности, циклически, сопоставлять по меньшей мере одно n-мерное поле 42 характеристик с существующими условиями применения колесного тягача 1. Для этого в блоке 8 памяти может быть предпочтительно сохранено по меньшей мере одно n-мерное начальное поле 42' характеристик. Таким образом, вычислительный блок 7 системы 6 помощи водителю при первом определении предельной нагрузки n1, n2 двигателя может осуществлять определение, основываясь на начальном поле 42' характеристик.
Кроме того, вычислительный блок 7 может быть выполнен с возможностью адаптации отображения начального поля 42' характеристик к существующим условиям применения путем использования измеренных рабочих параметров или начала работы с опорных точек в начальном поле 42' характеристик. Исходя из начального поля 42' характеристик, путем установки предварительно определенных рабочих точек, которые представляют опорные точки в поле 42 характеристик, не определяемые при нормальной работе силового агрегата 5, можно адаптировать отображение поля 42 характеристик к текущим условиям применения. Для этого на первом этапе результаты измерений рабочих параметров собираются при помощи соответствующих сенсорных устройств 25, 26 и предварительно обрабатываются вычислительным блоком 7. Если эти результаты измерений, например, частоты вращения, усилия, проскальзывание, являются квазистационарными, то они вносятся в n-мерное начальное поле характеристик. Если результаты измерений, определенные сенсорными устройствами 25, 26, отсутствуют в n-мерном пространстве начального поля 42' характеристик, поскольку при регулярном движении в полевых условиях они не встречаются или имеются лишь в недостаточном объеме, так как при работе силового агрегата в стандартном режиме они не используются, вместо них возможно применение опорных точек. Второй этап содержит проверку и адаптацию функциональной модели силового агрегата 5 на основе изменений текущих условий применения, которые, в свою очередь, определяются при помощи рабочих параметров.
Изображение на ФИГ. 5 показывает пример n-мерного начального поля 42' характеристик, которое адаптируется по причине изменения по меньшей мере одного рабочего параметра силового агрегата 5. Указанный рабочий параметр может представлять собой, например, частоту вращения вспомогательного устройства 19, выполненного в виде вентилятора двигателя, которая во время работы возрастает при увеличении нагрузки приводного двигателя 16, как показано на ФИГ. 5 стрелкой 47. Увеличение 47 частоты вращения вентилятора двигателя приводит к адаптации начального поля 42' характеристик к полю 42 характеристик или к полю 42'' характеристик.
Из приведенного выше описания со ссылками на ФИГ. 1-5 очевидно, что, например, стратегии 30 управления и/или целевые параметры 33 оптимизации реализуются не только на основе поля характеристик потребления топлива, индивидуального для соответствующего приводного двигателя 16, но и с учетом одного или нескольких компонентов силового агрегата 5. Таким образом, работа силового агрегата 5 в целом оптимизируется при помощи автоматической системы 27 регулировки предельной нагрузки двигателя на основе установки предельной нагрузки n1, n2 двигателя. При этом система 6 помощи водителю и автоматическая система 27 регулировки предельной нагрузки двигателя позволяют учитывать встречающиеся на практике разбросы коэффициентов полезного действия и/или рабочих характеристик компонентов силового агрегата 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЯГАЧ, СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ И СПОСОБ ЭКСПЛУАТАЦИИ ТЯГАЧА | 2021 |
|
RU2816600C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ТЯГАЧ | 2020 |
|
RU2821862C2 |
| ТРАКТОР И СПОСОБ ЭКСПЛУАТАЦИИ ТРАКТОРА | 2021 |
|
RU2832217C2 |
| КОЛЕСНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТЯГАЧ | 1993 |
|
RU2096234C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ СОЧЛЕНЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО С ТЯГАЧОМ И ПЛУГОМ | 2020 |
|
RU2816410C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАШИННЫЙ АГРЕГАТ | 2017 |
|
RU2749615C2 |
| КОЛЕСНЫЙ ТРАКТОР | 2004 |
|
RU2303546C2 |
| Трактор колесный сельскохозяйственный с электромеханической трансмиссией | 2022 |
|
RU2814696C1 |
| СЕДЕЛЬНЫЙ ТЯГАЧ | 2018 |
|
RU2679275C1 |
| Колесный мини-трактор | 2024 |
|
RU2829516C1 |
Группа изобретений относится к колесному тягачу, в частности к трактору, системе помощи водителю для применения в колесном тягаче и способу эксплуатации колесного тягача. Колесный тягач содержит: силовой агрегат, навесное орудие, систему помощи водителю. Силовой агрегат содержит: приводной двигатель, коробку передач, механизм отбора мощности, вспомогательное устройство. Система помощи водителю снабжена: вычислительным блоком, блоком памяти и блоком ввода-вывода данных, автоматической системой регулировки предельной нагрузки двигателя. Система регулировки предельной нагрузки двигателя работает на основе характеристических кривых. Автоматическая система регулировки предельной нагрузки двигателя выполнена с возможностью оптимизированного управления силовым агрегатом в зависимости от выбираемых стратегий управления и/или целевых параметров оптимизации, сохраненных в блоке памяти. Достигается оптимизация настройки силового агрегата колесного тягача и адаптированного навесного орудия. 3 н. и 15 з.п. ф-лы, 5 ил.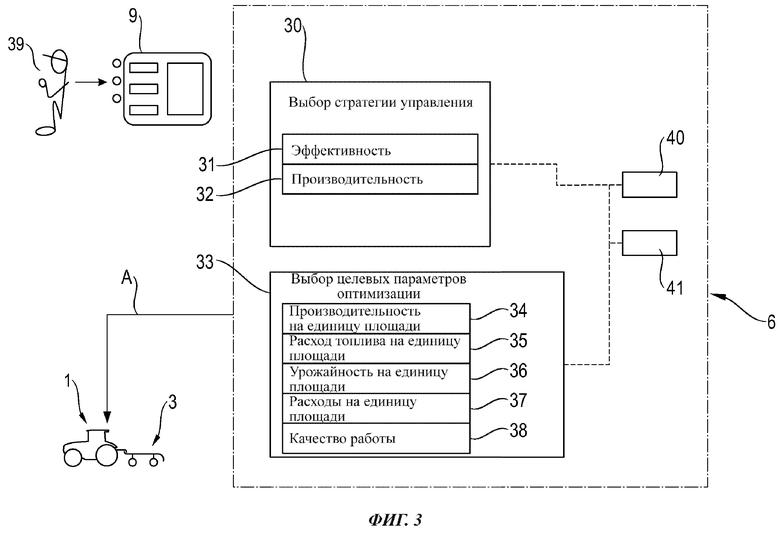
1. Колесный тягач (1), в частности трактор (2), с силовым агрегатом (5), а также по меньшей мере с одним навесным орудием (3, 4), адаптированным к колесному тягачу (1), при этом силовой агрегат (5) содержит по меньшей мере один приводной двигатель (16), коробку (17) передач, по меньшей мере один механизм (18) отбора мощности и по меньшей мере одно вспомогательное устройство (19), отличающийся тем, что указанный колесный тягач (1) для управления силовым агрегатом (5) содержит систему (6) помощи водителю, которая снабжена вычислительным блоком (7), блоком (8) памяти и блоком (9) ввода-вывода данных, при этом система (6) помощи водителю содержит автоматическую систему (27) регулировки предельной нагрузки двигателя, работающую на основе характеристических кривых, при этом указанная автоматическая система (27) регулировки предельной нагрузки двигателя выполнена с возможностью оптимизированного управления силовым агрегатом (5) в зависимости от выбираемых стратегий (30) управления и/или целевых параметров (33) оптимизации, сохраненных в блоке (8) памяти.
2. Колесный тягач (1) по п. 1, отличающийся тем, что силовой агрегат (5) вместе с системой (6) помощи водителю образует автоматическую систему (27) регулировки предельной нагрузки двигателя, при этом вычислительный блок (7) выполнен с возможностью, для реализации соответствующей выбранной стратегии (30) управления и/или целевых параметров (33) оптимизации, автономного определения параметров силового агрегата (5) и задания их силовому агрегату (5), предпочтительно приводному двигателю (16) и/или коробке (17) передач.
3. Колесный тягач (1) по п. 1 или 2, отличающийся тем, что стратегии (30) управления представляют собой стратегии, индивидуальные для колесного тягача и/или индивидуальные для навесного орудия.
4. Колесный тягач (1) по пп. 1-3, отличающийся тем, что выбираемая стратегия (30) управления содержит по меньшей мере стратегию управления "Эффективность" (31) или "Производительность" (32).
5. Колесный тягач (1) по одному из предшествующих пунктов, отличающийся тем, что целевые параметры (33) оптимизации представляют собой "Производительность на единицу площади" (34), "Расход топлива на единицу площади" (35), "Урожайность на единицу площади" (36), "Расходы на единицу площади" (37) и/или "Качество работы" (38).
6. Колесный тягач (1) по одному из предшествующих пунктов, отличающийся тем, что параметры, подлежащие учету для оптимизированного управления силовым агрегатом (5), представляют собой рабочие параметры силового агрегата (5), по меньшей мере одного вспомогательного устройства (19) силового агрегата (5), навесного орудия (3, 4) и/или параметры окружающей среды.
7. Колесный тягач (1) по одному из предшествующих пунктов, отличающийся тем, что с силовым агрегатом (5) связаны сенсорные устройства (25), выполненные с возможностью определения рабочих параметров силового агрегата (5).
8. Колесный тягач (1) по одному из предшествующих пунктов, отличающийся тем, что с колесным тягачом (1) и/или с навесным орудием (3, 4) связаны дополнительные сенсорные устройства (26), выполненные с возможностью получения информации о работе колесного тягача (1) и/или навесного орудия (3, 4).
9. Колесный тягач (1) по одному из пп. 6-8, отличающийся тем, что рабочие параметры силового агрегата (5) включают в себя выходную мощность по меньшей мере одного приводного двигателя (16), выходную мощность коробки (17) передач или степень загрузки коробки передач, приводную мощность по меньшей мере одного вспомогательного устройства (19) и/или по меньшей мере одного механизма (18) отбора мощности, проскальзывание, скорость движения, передаточное число и/или поток мощности в гидравлическом силовом агрегате.
10. Колесный тягач (1) по одному из пп. 6-9, отличающийся тем, что рабочие параметры навесного орудия (3, 4) включают в себя вид и/или тип навесного орудия (3, 4), положение хода и/или рабочую глубину навесного орудия (3, 4).
11. Колесный тягач (1) по одному из предшествующих пунктов, отличающийся тем, что в блоке (8) памяти сохранена функциональная модель силового агрегата (5), которая отображает по меньшей мере часть функциональных взаимосвязей силового агрегата (5).
12. Колесный тягач (1) по одному из предшествующих пунктов, отличающийся тем, что для отображения функциональных взаимосвязей силового агрегата (5) с рабочим параметром предельной нагрузки (n1, n2) двигателя связано по меньшей мере одно n-мерное поле (42) характеристик, при этом предельная нагрузка (n1, n2) двигателя определена как выходной параметр указанного по меньшей мере одного n-мерного поля (42) характеристик.
13. Колесный тягач (1) по одному из предшествующих пунктов, отличающийся тем, что по меньшей мере один или несколько рабочих параметров силового агрегата (5) и по меньшей мере одного вспомогательного устройства (19) силового агрегата (5) представляют собой входные параметры по меньшей мере одного n-мерного поля (42) характеристик.
14. Колесный тягач (1) по одному из предшествующих пунктов, отличающийся тем, что вычислительный блок (7) выполнен с возможностью выбора по меньшей мере одного n-мерного поля (42) характеристик в зависимости от выбранной стратегии (30) управления и взятия его за основу для определения предельной нагрузки (n1, n2) двигателя.
15. Колесный тягач (1) по одному из предшествующих пунктов, отличающийся тем, что вычислительный блок (7) выполнен с возможностью, во время работы, в частности циклически, сопоставления по меньшей мере одного n-мерного поля (42) характеристик с условиями применения колесного тягача (1), при этом в блоке (8) памяти предпочтительно сохранено по меньшей мере одно n-мерное начальное поле (42') характеристик, и при этом вычислительный блок (7) выполнен с возможностью, при первом определении предельной нагрузки (n1, n2) двигателя, осуществления этого определение на основе начального поля (42') характеристик.
16. Колесный тягач (1) по п. 15, отличающийся тем, что вычислительный блок (7) выполнен с возможностью адаптации отображения начального поля (42') характеристик к существующим условиям применения путем использования измеренных параметров силового агрегата (5) или начала работы с опорных точек в начальном поле (42') характеристик.
17. Система (6) помощи водителю с автоматической системой (27) регулировки предельной нагрузки двигателя для применения в колесном тягаче (1, 2) по одному из предшествующих пунктов.
18. Способ эксплуатации колесного тягача (1), в частности трактора (2), с силовым агрегатом (5), а также по меньшей мере с одним навесным орудием (3, 4), адаптированным к колесному тягачу (1), при этом силовой агрегат (5) содержит по меньшей мере один приводной двигатель (16), коробку (17) передач, по меньшей мере один механизм (18) отбора мощности, а также по меньшей мере одно вспомогательное устройство (19), отличающийся тем, что управление силовым агрегатом (5) осуществляют посредством системы (6) помощи водителю колесного тягача (1), которая содержит вычислительный блок (7), блок (8) памяти и блок (9) ввода-вывода данных, при этом управление силовым агрегатом (5) осуществляют посредством работающей на основе характеристических кривых автоматической системы (27) регулировки предельной нагрузки двигателя системы (6) помощи водителю, при этом для оптимизированной работы силового агрегата (5) посредством автоматической системы (27) регулировки предельной нагрузки двигателя осуществляют управление в зависимости от выбираемых стратегий (30) управления и/или целевых параметров (33) оптимизации, сохраненных в блоке (8) памяти.
| DE 102016118203 A1, 16.11.2017 | |||
| DE 102005001526 A1, 27.07.2006 | |||
| DE 102017119784 A1, 28.02.2019 | |||
| US 2010192907 A1, 05.08.2010. |
