Область техники, к которой относится изобретение
Изобретение относится к сельскохозяйственному тягачу, в частности к трактору, для использования при выполнении сельскохозяйственного рабочего процесса согласно ограничительной части пункта 1 формулы изобретения.
Указанный сельскохозяйственный тягач содержит бортовые рабочие агрегаты, настраиваемые посредством машинных параметров, и для обработки поля в зависимости от сельскохозяйственного рабочего процесса может быть соединен с соответствующим навесным (приставным) оборудованием. При этом один и тот же тягач может быть скомбинирован с самым различным навесным оборудованием. Такое навесное оборудование может представлять собой, например, косилки, прессы-подборщики, валкователи, ворошилки, почвообрабатывающие орудия, распределители удобрений или т.п. Навесное оборудование может соединяться частично спереди, а частично - сзади тягача.
Уровень техники
Из ЕР 3243367 А2 и ЕР 3243368 А2 известны тягачи, которые выполнены в виде трактора, и которые при соединении в самом общем случае с навесным оборудованием или, в частности, с почвообрабатывающим орудием, образуют сочлененное транспортное средство, в котором, как тягач, так и навесное оборудование самооптимизируются и при этом также оказывают влияние друг на друга.
С известными тягачами был сделан первый шаг в направлении эффективной оптимизации тягача. Однако такая оптимизация является эффективной только при обработке поля при помощи уже имеющейся комбинации сельскохозяйственного тягача и навесного оборудования. В отношении оптимизации тягача на различных этапах выполнения сельскохозяйственного рабочего процесса, когда тягач еще не соединен с навесным оборудованием, имеется значительный потенциал.
Раскрытие сущности изобретения
Задача изобретения заключается в модернизации и усовершенствовании известного сельскохозяйственного тягача таким образом, чтобы повысить эффективность его оптимизации на различных этапах выполнения сельскохозяйственного рабочего процесса.
Эта задача решена при помощи сельскохозяйственного тягача согласно ограничительной части пункта 1 посредством признаков отличительной части пункта 1 формулы изобретения.
Прежде всего, следует исходить из того, что сельскохозяйственный тягач содержит модуль управления и регулирования, который оптимизирует рабочие агрегаты путем определения машинных параметров для рабочих агрегатов с использованием данных оптимизации в отношении по меньшей мере одного целевого показателя.
При этом важно, чтобы при такой оптимизации выполнялось несколько отличных друг от друга ступеней. Известно, что многоступенчатая стратегия оптимизации с различными целевыми показателями на отдельных ступенях обладает значительным потенциалом для общей оптимизации сельскохозяйственного тягача. Указанная стратегия оптимизации включает в себя по меньшей мере следующие ступени: "на машинном дворе", "около поля" и "в поле". При этом первая ступень "на машинном дворе" относится к оптимизации сельскохозяйственного тягача в отношении его базовой конфигурации в качестве подготовки к двум следующим ступеням, вторая ступень "около поля" относится к оптимизации сельскохозяйственного тягача в отношении конфигурации, специфичной для навесного оборудования, и третья ступень "в поле" относится к оптимизированной адаптации базовой конфигурации и конфигурации, специфичной для навесного оборудования, во время обработки поля.
В частности, предлагается, чтобы модуль управления и регулирования осуществлял многоступенчатую стратегию оптимизации с отличающимися друг от друга ступенями, чтобы многоступенчатая стратегия оптимизации содержала первую ступень "на машинном дворе", целевой показатель которой представляет собой оптимизацию базовой конфигурации сельскохозяйственного тягача, чтобы многоступенчатая стратегия оптимизации содержала вторую ступень "около поля", целевым показателем которой является оптимизация конфигурации сельскохозяйственного тягача, специфичной для навесного оборудования, и чтобы многоступенчатая стратегия оптимизации содержала также по меньшей мере одну третью ступень "в поле", целевой показатель которой представляет собой адаптацию базовой конфигурации и конфигурации, специфичной для навесного оборудования, во время обработки поля.
В особенно предпочтительном варианте осуществления согласно пункту 2 формулы изобретения ступени различаются в отношении этапа выполнения сельскохозяйственного рабочего процесса. Благодаря тому, что различные целевые показатели соответствующей ступени поставлены в соответствие с одним этапом выполнения сельскохозяйственного рабочего процесса, при помощи сельскохозяйственного тягача сельскохозяйственный рабочий процесс может быть оптимизирован.
Если указанные ступени, как требуется в варианте осуществления согласно пункту 3 формулы изобретения, поставлены в соответствие с одной позиционной областью относительно поля, это также может способствовать повышению эффективности в целевых показателях. При этом позиционные области, однако, не следует рассматривать как узко ограниченные, абсолютно различные с географической точки зрения области. Напротив, предпочтительно чтобы соответствующие ступени хотя бы частично относились к различным позиционным областям, которые могут перекрывать друг друга.
В вариантах осуществления согласно пунктам 4-6 формулы изобретения данные оптимизации, рабочие агрегаты или машинные параметры параметры соответствующих ступеней подразделяются по меньшей мере на две, предпочтительно, в соответствии с предложением, на три ступени. При этом учитывается тот факт, что ступени, как правило, различаются не только по целевым показателям, но и с точки зрения имеющихся и необходимых данных оптимизации, машинных параметров, которые должны быть там рационально заданы, и даже рабочих агрегатов, подлежащих оптимизации.
Пункты 7 и 8 формулы изобретения указывают предпочтительные свойства машинных параметров на различных ступенях.
В пункте 9 формулы изобретения указаны данные оптимизации, при помощи которых базовая конфигурация в качестве целевого показателя оптимизации на первой ступени может быть улучшена особенно успешно. Соответствующие машинные параметры, предпочтительно подлежащие определению на первой ступени, приведены в пункте 10 формулы изобретения. То же самое относится к пунктам 11 и 12 формулы изобретения для второй ступени и к пунктам 13 и 14 формулы изобретения для третьей ступени.
В заключение пункт 15 формулы изобретения представляет предпочтительные варианты осуществления оптимизации рабочих агрегатов на третьей ступени.
Краткое описание чертежей
Далее приведено более подробное описание изобретения со ссылками на прилагаемые чертежи, иллюстрирующие только один пример осуществления. На чертежах показаны:
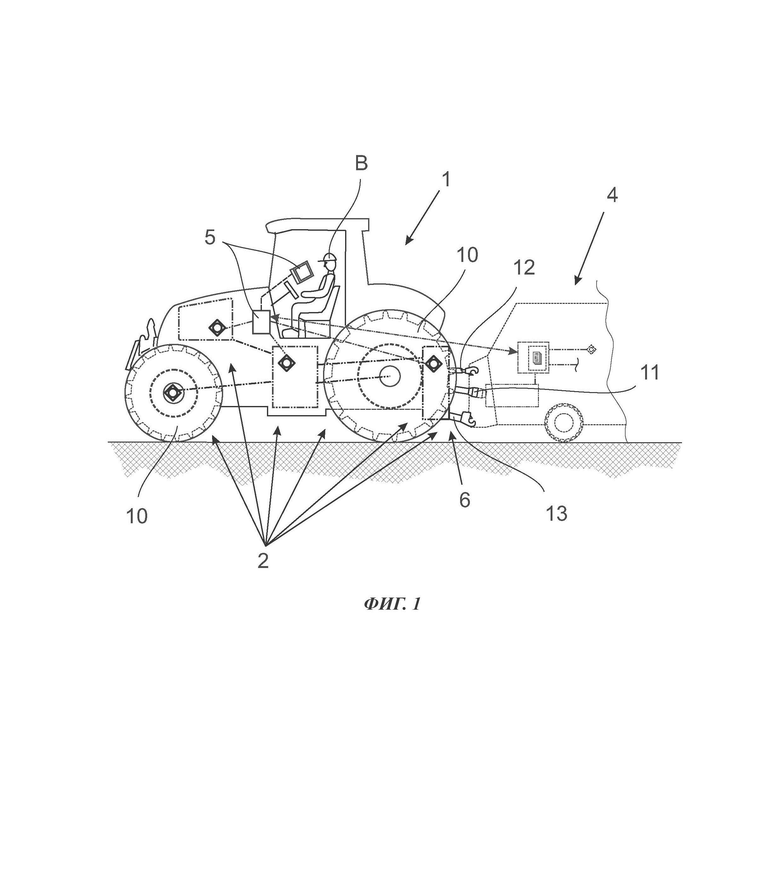
ФИГ. 1 - предлагаемый сельскохозяйственный тягач, выполненный здесь в виде трактора, со схематически показанным навесным оборудованием и
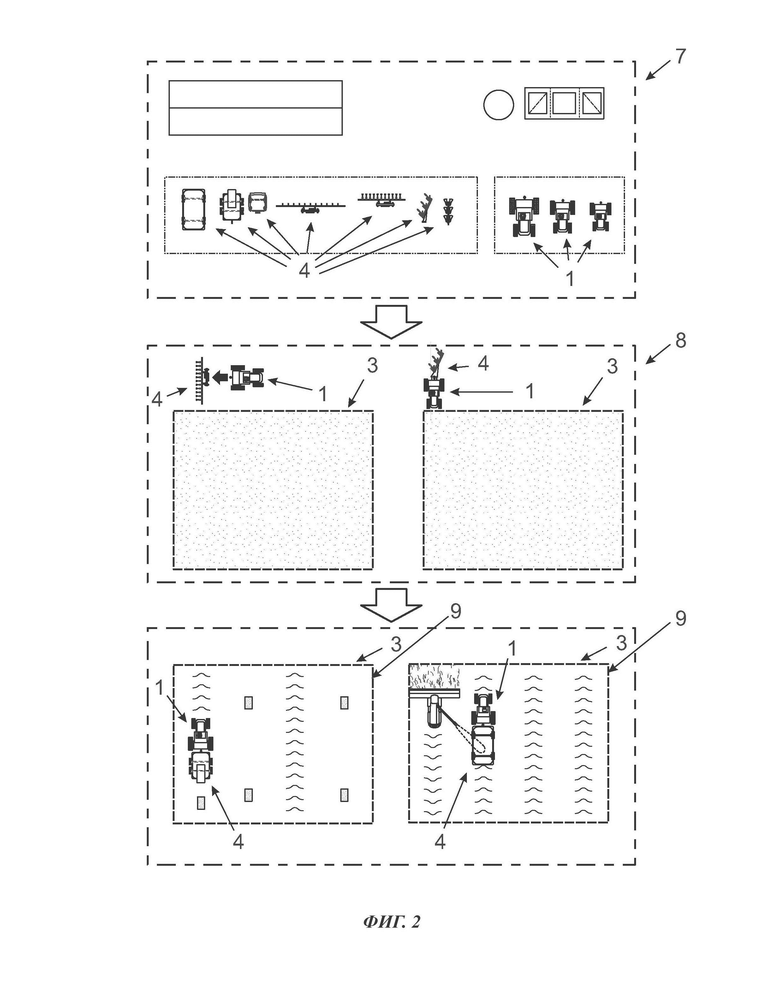
ФИГ. 2 - схематическое изображение предлагаемых ступеней "на машинном дворе", "около поля" и "в поле".
Осуществление изобретения
На ФИГ. 1 показан предлагаемый сельскохозяйственный тягач 1, выполненный в данном случае в виде трактора. Этот сельскохозяйственный тягач 1 используется при выполнении сельскохозяйственного рабочего процесса. Такой сельскохозяйственный рабочий процесс может представлять собой, например, сбор урожая зерновой культуры, включая проезд к месту сбора урожая и обратно. Сельскохозяйственный тягач 1 содержит рабочие агрегаты 2, настраиваемые посредством машинных параметров. Машинные параметры могут включать в себя множество настраиваемых параметров, которые рассматриваются ниже более подробно. В качестве примера можно назвать балластировку сельскохозяйственного тягача 1 и частоту вращения двигателя.
Для обработки поля 3 сельскохозяйственный тягач 1 может быть соединен с навесным оборудованием 4. Примеры такого навесного оборудования 4 указаны во вводной части описания, а также показаны на ФИГ. 2. При этом термин "может быть соединен" относится к возможности создания механического и в большинстве случаев также электрического и/или гидравлического соединения между сельскохозяйственным тягачом 1 и навесным оборудованием 4.
Сельскохозяйственный тягач 1 содержит модуль 5 управления и регулирования, который оптимизирует рабочие агрегаты 2 путем определения машинных параметров для рабочих агрегатов 2 с применением данных оптимизации в отношении по меньшей мере одного целевого показателя. Модуль 5 управления и регулирования предпочтительно выставляет по меньшей мере часть машинных параметров на рабочих агрегатах 2 самостоятельно и автоматически. Другую часть машинных параметров модуль 5 управления и регулирования может передать для выставления пользователю В. Так, например, автоматическое выставление балластировки является невозможным или весьма затруднительным.
Машинные параметры рабочих агрегатов 2 могут, в принципе, включать в себя машинные параметры всех уровней абстракции. При этом машинный параметр более высокого уровня абстракции может, в свою очередь, оказывать влияние на другой машинный параметр более низкого уровня абстракции. Таким образом, термин "машинные параметры" нужно толковать в широком смысле, однако, следует подчеркнуть, что машинные параметры представляют собой прямые настройки, которые могут быть однозначно выставлены сами по себе. При этом стратегия, как, например, "экономия дизельного топлива" не является машинным параметром. Термин "рабочие агрегаты" также следует толковать в широком смысле, поскольку один рабочий агрегат 2 может представлять собой часть другого рабочего агрегата 2. При этом оптимизацию рабочих агрегатов 2 следует понимать не как исключительную оптимизацию отдельного рабочего агрегата 2, но как оптимизацию сельскохозяйственного тягача 1 в целом.
По мере выполнения сельскохозяйственного рабочего процесса рамочные условия сельскохозяйственного рабочего процесса заметно отличаются. Для того чтобы наилучшим образом адаптировать сельскохозяйственный тягач 1 к этим различным рамочным условиям, предлагается, чтобы модуль 5 управления и регулирования осуществлял многоступенчатую стратегию оптимизации с отличающимися друг от друга ступенями. Для этих ступеней характерно то, что они отличаются друг от друга не только в отношении их рамочных условий, но также в отношении их целевых показателей.
Многоступенчатая стратегия оптимизации содержит первую ступень "на машинном дворе", целевым показателем которой является оптимизация базовой конфигурации сельскохозяйственного тягача 1. Термин "базовая конфигурация" поясняется далее более подробно, однако, в качестве примера можно указать вид шин. Вид шин сельскохозяйственного тягача 1 не может быть произвольно изменен в любой момент времени и поэтому должен быть обоснованно выбран уже перед началом выполнения сельскохозяйственного рабочего процесса.
Согласно изобретению многоступенчатая стратегия оптимизации содержит также вторую ступень "около поля", целевым показателем которой является оптимизация конфигурации сельскохозяйственного тягача 1, специфичной для навесного оборудования. При этом термин "специфичная для навесного оборудования" относится к тем машинным параметрам, которые в самом широком смысле оказывают влияние на функционирование навесного оборудования 4, однако, предпочтительно к тем, которые во время своего функционирования испытывают влияние навесного оборудования 4. В то время как указанный выбор шин должен быть связан с базовой конфигурацией сельскохозяйственного тягача 1, сельскохозяйственный тягач 1, в частности, в области трехточечного механизма современного трактора, содержит различные рабочие агрегаты 2 с их машинными параметрами, которые, хотя и принадлежат сельскохозяйственному тягачу 1, однако, их конфигурация является специфичной для навесного оборудования.
Согласно изобретению многоступенчатая стратегия оптимизации содержит также третью ступень "в поле", целевым показателем которой адаптация базовой конфигурации и конфигурации, специфичной для навесного оборудования, во время обработки поля 3. Эта ступень, наконец, представляет собой ту ступень, которая непосредственно относится к обработке поля 3, в то время как первая и вторая ступени служат для подготовки третьей ступени. Соответственно, первая, вторая и третья ступень предпочтительно выполняются в таком порядке друг за другом. Возможно также, что на первую ступень приходится несколько проходов второй и третьей ступени, если, например, навесное оборудование 4 заменяется после прохождения второй и третьей ступени. При этом наряду с указанными ступенями согласно изобретению могут быть предусмотрены также промежуточные ступени, предшествующие и последующие ступени.
На ФИГ. 2 схематически показаны три ступени согласно изобретению, ограниченные наружными штриховыми рамками.
В данном случае и предпочтительно, чтобы ступени различались в отношении этапа выполнения сельскохозяйственного рабочего процесса. Термин "этап выполнения" относится к различным работам сельскохозяйственного тягача 1 во время выполнения сельскохозяйственного рабочего процесса. При этом первая ступень предпочтительно относится к началу выполнения сельскохозяйственного рабочего процесса, и сельскохозяйственный тягач 1 на первой ступени еще не соединен с навесным оборудованием 4. Дополнительно или альтернативно вторая ступень предпочтительно относится к соединению сельскохозяйственного тягача 1 с навесным оборудованием 4. Также дополнительно или альтернативно третья ступень предпочтительно относится к применению навесного оборудования 4 в поле 3.
В данном случае и предпочтительно ступени относятся к соответствующим позиционным областям 7-9, имеющим различное расположение относительно поля 3. При этом предпочтительно, чтобы первая ступень относилась к позиционной области 7, дальней от поля и предпочтительно представляющей собой машинный двор. Дополнительно или альтернативно, вторая ступень предпочтительно относится к позиционной области 8, расположенной около поля. Также дополнительно или альтернативно третья ступень может относиться к позиционной области 9, расположенной в поле.
В предпочтительном варианте осуществления первая ступень оптимизации относится к базовой конфигурации, в частности на машинном дворе, в начале выполнения сельскохозяйственного рабочего процесса. При этом пользователь В еще перед выездом сельскохозяйственного тягача 1 может выставить различные машинные параметры. Модуль 5 управления и регулирования может настроить другие машинные параметры для предстоящего дорожного движения и дневного планирования. Затем пользователь В предпочтительно направляется к полю 3. При этом сельскохозяйственный тягач 1 может быть уже соединен с навесным оборудованием 4, которое, однако, является только буксируемым. Также предпочтительно, чтобы навесное оборудование 4 находилось около поля в состоянии готовности.
Вторая ступень предпочтительно относится к выставлению машинных параметров на навесном оборудовании 4 или к соединению с навесным оборудованием 4 и к выставлению машинных параметров на навесном оборудовании 4 или к выставлению машинных параметров сельскохозяйственного тягача 1, специфичных для навесного оборудования, непосредственно около поля 3. При этом могут быть выставлены специфичные машинные параметры для навесного оборудования, а также специфичные машинные параметры для тягача. На второй ступени могут быть также изменены те машинные параметры, которые ранее были настроены для дорожного движения. После окончания оптимизации второй ступени пользователь с сельскохозяйственным тягачом 1 предпочтительно прибывает на поле 3 и начинает его обработку.
Из поясняемого примера очевидно, чтобы предпочтительно по меньшей мере на двух ступенях, предпочтительно по меньшей мере на трех ступенях, более предпочтительно на первой, второй и третьей ступенях для оптимизации рабочих агрегатов 2 по меньшей мере частично использовались различные виды данных оптимизации. Так, например, на первой ступени актуальным является дневное планирование, на второй ступени могут быть использованы специфичные данные навесного оборудования 4, которые относятся к его однократной настройке, а на третьей ступени в качестве данных оптимизации могут быть использованы оперативные (т.е. получаемые в режиме реального времени) данные датчиков сельскохозяйственного тягача 1 и/или навесного оборудования 4.
При этом данные оптимизации могут поступать из различных источников, в частности, от самого сельскохозяйственного тягача 1, предпочтительно от датчиков сельскохозяйственного тягача 1 и/или от внешнего источника данных, например, от компьютера машинного двора или облачного сервера и/или от навесного оборудования 4, предпочтительно от датчиков навесного оборудования 4. Данные оптимизации, поступающие от навесного оборудования 4, могут предпочтительно передаваться при помощи прямой линии связи между сельскохозяйственным тягачом 1 и навесным оборудованием 4. На первой ступени данные оптимизации по прямой связи между сельскохозяйственным тягачом 1 и навесным оборудованием 4 предпочтительно не используются. На второй ступени такие данные, поступающие по прямой связи между сельскохозяйственным тягачом 1 и навесным оборудованием 4, уже могут быть использованы, а на третьей ступени они предпочтительно используются.
В данном случае и предпочтительно по меньшей мере на двух ступенях, предпочтительно по меньшей мере на трех ступенях, более предпочтительно на первой, второй и третьей ступени по меньшей мере частично оптимизируются различные рабочие агрегаты 2. Дополнительно или альтернативно по меньшей мере на двух ступенях, предпочтительно по меньшей мере на трех ступенях, более предпочтительно на первой, второй и третьей ступени по меньшей мере частично определяются различные машинные параметры. Достоинства этих вариантов осуществления также вытекают из вышеописанного примера и характерных отличий разных ступеней.
На первой ступени предпочтительно определяется по меньшей мере часть машинных параметров, которые могут быть выставлены независимо от навесного оборудования 4. Это следует из того, что на первой ступени навесное оборудование 4 предпочтительно еще не соединено с сельскохозяйственным тягачом 1. На второй ступени предпочтительно по меньшей мере частично определяются машинные параметры, которые могут быть выставлены только при наличии присоединенного навесного оборудования 4. В качестве примера можно назвать кинематику заднего подъемного устройства сельскохозяйственной рабочей машины 1. Нельзя сказать, что это невозможно выполнить без навесного оборудования 4, однако, обычно такое выставление является целесообразным только после его присоединения. На третьей ступени предпочтительно по меньшей мере частично определяются машинные параметры, которые изменяются во время обработки поля 3.
Как указано выше, на первой и/или на второй и/или на третьей ступени по меньшей мере некоторые машинные параметры предпочтительно выставляются автоматически модулем 5 управления и регулирования. Может быть предусмотрено, чтобы, в частности, на первой и/или на второй ступени не все машинные параметры выставлялись автоматически. Однако предпочтительно, чтобы на третьей ступени, по меньшей мере временно все машинные параметры были выставлены автоматически. Это позволяет пользователю В не прерывать обработку поля 3.
Может быть предусмотрено, чтобы на первой ступени определялись машинные параметры, которые по меньшей мере частично являются постоянными во время второй и третьей ступени. Также предпочтительно, альтернативно или дополнительно, на второй ступени могут определяться машинные параметры, которые по меньшей мере частично являются постоянными во время третьей ступени. При этом теоретически даже возможно, чтобы во время первой и второй ступени определялись только те машинные параметры, которые являются постоянными во время третьей ступени. В этом случае во время третьей ступени все-таки определялись бы и предпочтительно автоматически выставлялись различные адаптации других машинных параметров базовой конфигурации и конфигурации, специфичной для навесного оборудования. Однако обычно машинные параметры, определенные во время соответствующих ступеней, частично перекрываются.
Может быть предусмотрено, чтобы на третьей ступени машинные параметры по меньшей мере частично определялись на основе данных, принятых от навесного оборудования 4. Такие данные могут представлять собой, например, данные датчиков навесного оборудования 4.
Далее указаны предпочтительные варианты данных оптимизации машинных параметров.
В этом случае и предпочтительно данные оптимизации первой ступени включают в себя данные о балластировке сельскохозяйственного тягача 1 и/или о профиле пользователя и/или о виде шин сельскохозяйственного тягача 1 и/или о давлении в шинах сельскохозяйственного тягача 1 и/или о поле и/или, в частности, прогнозные данные о погодных условиях и/или о дополнительном оборудовании, которое может быть установлено на сельскохозяйственном тягаче 1 для выполнения сельскохозяйственного рабочего процесса. Данные о виде шин могут включать в себя, в частности, тип и размер шин 10. Профиль пользователя может содержать различные предпочитаемые настройки машинных параметров и/или модуля 5 управления и регулирования. Данные о поле могут содержать, в частности, данные о сухости, о виде выращиваемой культуры и/или о типе почвы и/или о состоянии почвы. Прогнозные данные о погодных условиях могут содержать информацию, например, о том, следует ли ожидать сильного дождя. Соответственно, шины могут быть адаптированы к состоянию почвы, влажность которой предположительно повысится. Дополнительное монтируемое оборудование может представлять собой, например, камеру для обнаружения диких животных, которая является особенно полезной во время уборки урожая.
Аналогично этому машинные параметры, определяемые на первой ступени, предпочтительно включают в себя вес балластных грузов и/или вид шин и/или давление в шинах и/или ширину колеи, в частности, регулируемую ширину колеи задней оси. Как указано выше, может быть предусмотрено, чтобы часть машинных параметров первой ступени выставлялась вручную. Это может осуществляться, в частности, в процессе монтажа. Альтернативно или дополнительно рабочие агрегаты 2 могут калиброваться на первой ступени. При ручном выставлении предусмотрено, чтобы модуль 5 управления и регулирования предлагал соответствующие машинные параметры пользователю В.
В этом случае предпочтительно предусмотрено, чтобы данные оптимизации второй ступени содержали данные о навешивании (присоединении) оборудования, в частности, о трехточечном механизме 6 сельскохозяйственного тягача 1 и/или о виде навесного оборудования 4 и/или, в частности, актуальные данные о погодных условиях. Дополнительно к виду навесного оборудования 4 данные оптимизации второй ступени могут содержать, в частности, также совсем специфичные идентификационные данные навесного оборудования 4. Так, может быть предусмотрено, чтобы данные оптимизации первой ступени содержали вид навесного оборудования 4, например, вид "плуг", при этом балластировка сельскохозяйственного тягача 1 может быть соответственно выставлена еще на машинном дворе. В то же время специфичный тип плуга и его свойства могут быть связаны со второй ступенью, когда указанный плуг соединяется с сельскохозяйственным тягачом 1.
Может быть предусмотрено, чтобы машинные параметры, определяемые на второй ступени, содержали высоту ходовой части и/или частоту вращения вала 11 отбора мощности, и/или настройку верхней тяги 12 и/или нижней тяги 13. Именно эти машинные параметры часто невозможно или нецелесообразно выставлять перед соединением сельскохозяйственного тягача 1 с навесным оборудованием 4.
В этом случае предпочтительно данные оптимизации третьей ступени включают в себя данные оптимизации, принятые от навесного оборудования 4, о скорости движения и/или о давлении масла, и/или о количестве масла, и/или о направлении движения, и/или о давлении по площади контакта, и/или о рабочей глубине, и/или о частоте вращения вала 11 отбора мощности, и/или о параметрах двигателя и коробки передач, в частности предельную нагрузку двигателя. При этом количество масла относится к устройствам гидравлической системы сельскохозяйственного тягача 1, количество которых увеличивается в результате присоединения навесного оборудования 4. В зависимости от сложности навесного оборудования 4 эти значительно улучшенные данные могут обеспечивать, например, оптимальную или максимальную скорость движения.
Аналогично этому машинные параметры, определяемые на третьей ступени, в свою очередь, предпочтительно включают в себя скорость движения и/или количество масла, и/или направление движения, и/или частоту вращения вала 11 отбора мощности, и/или параметры двигателя и коробки передач, в частности предельную нагрузку двигателя. Машинные параметры, определяемые на третьей ступени, предпочтительно представляют собой такие машинные параметры, которые должны регулярно адаптироваться во время обработки поля 3. Эта адаптация может происходить непрерывно и/или с определенной частотой и/или по требованию.
В данном случае и предпочтительно на третьей ступени модуль 5 управления и регулирования оптимизирует рабочие агрегаты 2 на основе данных оптимизации в отношении целевого показателя на основе регулятора поля характеристик и/или на основе предварительного выбора стратегии и/или на основе фиксированных правил. Регулятор поля характеристик может содержать, например, поле характеристик, которое показывает, какая частота вращения вала 11 отбора мощности при каком количестве масла является оптимальной при определенных полевых условиях. Предварительный выбор стратегии может содержать, например, стратегии "Эффективность", "Производительность", "Качество работы" и "Комфорт", которые предъявляют несколько отличные требования, например, к ходовой части и амортизации. Фиксированное правило может представлять собой, например, максимальный поток масла для определенного навесного оборудования 4.
В данном случае и предпочтительно на третьей ступени модуль 5 управления и регулирования задает навесному оборудованию 4 по меньшей мере один машинный параметр для выставления. Дополнительно или альтернативно модуль 5 управления и регулирования передает навесному оборудованию 4 данные о распознавании расположенного впереди поля, например, тот факт, что в полевой культуре замечено дикое животное, поэтому все рабочие агрегаты должны быть незамедлительно остановлены.
Выполнение предлагаемой многоступенчатой стратегии оптимизации в рамках сельскохозяйственного рабочего процесса, с применением предлагаемого сельскохозяйственного тягача 1 может предпочтительно осуществляться пользователем при помощи естественно-языкового диалога с модулем 5 управления и регулирования. Таким образом, обеспечивается возможность для пользователя В быстро понимать и предоставлять необходимую информацию.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 - Сельскохозяйственный тягач
2 - Рабочие агрегаты
3 - Поле
4 - Навесное оборудование
5 - Модуль управления и регулирования
6 - Трехточечный механизм
7 - Позиционная область, удаленная от поля
8 - Позиционная область около поля
9 - Позиционная область в поле
10 - Шины
11 - Вал отбора мощности
12 - Верхняя тяга
13 - Нижняя тяга
В – Пользователь.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ СОЧЛЕНЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО С ТЯГАЧОМ И ПЛУГОМ | 2020 |
|
RU2816410C2 |
| КОЛЕСНЫЙ ТЯГАЧ, СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ И СПОСОБ ЭКСПЛУАТАЦИИ КОЛЕСНОГО ТЯГАЧА | 2020 |
|
RU2812028C2 |
| ТЯГАЧ, СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ И СПОСОБ ЭКСПЛУАТАЦИИ ТЯГАЧА | 2021 |
|
RU2816600C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАШИННЫЙ АГРЕГАТ | 2017 |
|
RU2749615C2 |
| ТРАКТОР И СПОСОБ ЭКСПЛУАТАЦИИ ТРАКТОРА | 2021 |
|
RU2832217C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОЧИХ ПРОЦЕССОВ | 2019 |
|
RU2802847C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2018 |
|
RU2769473C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2019 |
|
RU2796063C2 |
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ ДЛЯ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫМ СОЧЛЕНЕННЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И СЕЛЬСКОХОЗЯЙСТВЕННОЕ СОЧЛЕНЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2018 |
|
RU2778452C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2016 |
|
RU2727648C2 |
Изобретение относится к сельскохозяйственному тягачу. Сельскохозяйственный тягач (1) содержит рабочие агрегаты (2) и соединен с навесным оборудованием (4). Сельскохозяйственный тягач (1) содержит модуль (5) управления и регулирования, выполненный с возможностью оптимизации рабочих агрегатов (2) путем определения машинных параметров для рабочих агрегатов (2) с применением данных оптимизации в отношении. Модуль (5) управления и регулирования имеет возможность осуществления многоступенчатой стратегии оптимизации с отличающимися друг от друга ступенями. Многоступенчатая стратегия оптимизации содержит три ступени "на машинном дворе", "около поля" и "в поле". Целевыми показателями указанных ступеней являются оптимизация базовой конфигурации сельскохозяйственного тягача (1), оптимизация конфигурации сельскохозяйственного тягача (1), специфичной для навесного оборудования, а также адаптация базовой конфигурации и конфигурации, специфичной для навесного оборудования, во время обработки поля (3). Достигается повышение эффективности оптимизации на различных этапах выполнения сельскохозяйственного рабочего процесса. 14 з.п. ф-лы, 2 ил.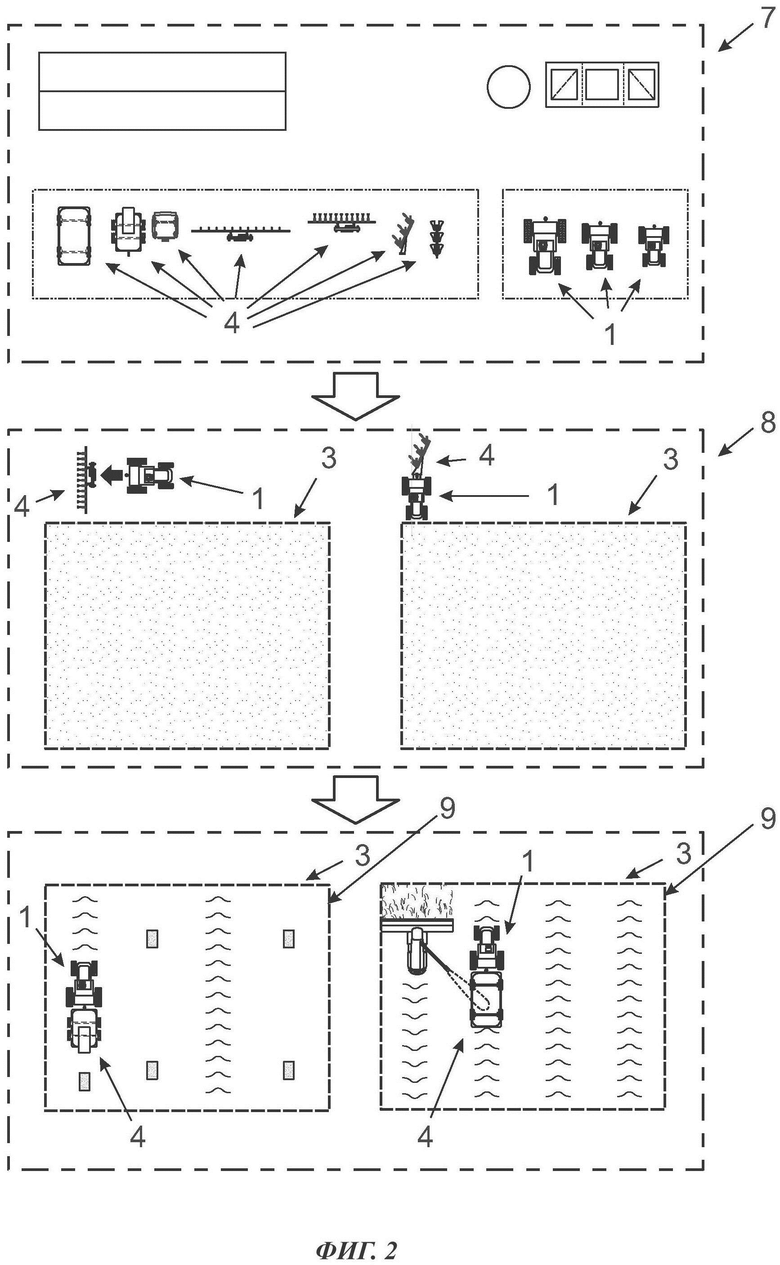
1. Сельскохозяйственный тягач (1), в частности трактор, для использования при выполнении сельскохозяйственного рабочего процесса, содержащий рабочие агрегаты (2), настраиваемые посредством машинных параметров, при этом сельскохозяйственный тягач (1) для обработки поля (3) может быть соединен с навесным оборудованием (4), и при этом сельскохозяйственный тягач (1) содержит модуль (5) управления и регулирования, выполненный с возможностью оптимизации рабочих агрегатов (2) путем определения машинных параметров для рабочих агрегатов (2) с применением данных оптимизации в отношении по меньшей мере одного целевого показателя, отличающийся тем, что модуль (5) управления и регулирования выполнен с возможностью осуществления многоступенчатой стратегии оптимизации с отличающимися друг от друга ступенями, причем многоступенчатая стратегия оптимизации содержит:
первую ступень, выполняемую на машинном дворе, целевым показателем которой является оптимизация базовой конфигурации сельскохозяйственного тягача (1),
вторую ступень, выполняемую около поля, целевым показателем которой является оптимизация конфигурации сельскохозяйственного тягача (1), специфичной для навесного оборудования, и
третью ступень, выполняемую в поле, целевым показателем которой является адаптация базовой конфигурации и конфигурации, специфичной для навесного оборудования, во время обработки поля (3),
при этом указанные ступени различны в отношении этапа выполнения сельскохозяйственного рабочего процесса, причем модуль (5) управления и регулирования предназначен для одного или более из следующего:
выполнения первой ступени до соединения сельскохозяйственного тягача с навесным оборудованием, выполнения второй ступени в ответ на обнаружение соединения сельскохозяйственного тягача с навесным оборудованием, или выполнения третьей ступени в ответ на обнаружение использования сельскохозяйственным тягачом навесного оборудования для обработки поля.
2. Тягач по п. 1, отличающийся тем, что первая ступень поставлена в соответствие с началом выполнения сельскохозяйственного рабочего процесса, а сельскохозяйственный тягач (1) на первой ступени не соединен с навесным оборудованием (4), и/или вторая ступень поставлена в соответствие с соединением сельскохозяйственного тягача (1) с навесным оборудованием (4), и/или третья ступень поставлена в соответствие с применением навесного оборудования (4) в поле (3).
3. Тягач по п. 1 или 2, отличающийся тем, что каждая из указанных ступеней поставлена в соответствие с соответствующей позиционной областью относительно поля (3), при этом предпочтительно, чтобы первая ступень была поставлена в соответствие с позиционной областью (7), удаленной от поля, предпочтительно с машинным двором, и/или вторая ступень была поставлена в соответствие с позиционной областью (8) около поля, и/или третья ступень была поставлена в соответствие с позиционной областью (9) в поле.
4. Тягач по одному из предшествующих пунктов, отличающийся тем, что по меньшей мере на двух ступенях, предпочтительно по меньшей мере на трех ступенях, более предпочтительно на первой, второй и третьей ступени по меньшей мере частично предусмотрено использование различных видов данных оптимизации для оптимизации рабочих агрегатов (2).
5. Тягач по одному из предшествующих пунктов, отличающийся тем, что по меньшей мере на двух ступенях, предпочтительно по меньшей мере на трех ступенях, более предпочтительно на первой, второй и третьей ступени предусмотрена по меньшей мере частичная оптимизация различных рабочих агрегатов (2).
6. Тягач по одному из предшествующих пунктов, отличающийся тем, что по меньшей мере на двух ступенях, предпочтительно по меньшей мере на трех ступенях, более предпочтительно на первой, второй и третьей ступени предусмотрено по меньшей мере частичное определение различных машинных параметров.
7. Тягач по одному из предшествующих пунктов, отличающийся тем, что на первой ступени предусмотрено по меньшей мере частичное определение машинных параметров, которые могут быть выставлены независимо от навесного оборудования (4), и/или на второй ступени предусмотрено по меньшей мере частичное определение машинных параметров, которые могут быть выставлены только при присоединенном навесном оборудовании (4), и/или на третьей ступени предусмотрено по меньшей мере частичное определение машинных параметров, которые изменяются во время обработки поля (3).
8. Тягач по одному из предшествующих пунктов, отличающийся тем, что на первой ступени предусмотрено определение машинных параметров, которые по меньшей мере частично являются постоянными во время второй и третьей ступени, и/или на второй ступени предусмотрено определение машинных параметров, которые по меньшей мере частично являются постоянными во время третьей ступени, и/или на третьей ступени предусмотрено по меньшей мере частичное определение машинных параметров на основании данных, принятых от навесного оборудования (4).
9. Тягач по одному из предшествующих пунктов, отличающийся тем, что данные оптимизации первой ступени включают в себя данные о балластировке сельскохозяйственного тягача (1) и/или о профиле пользователя, и/или о шинах сельскохозяйственного тягача (1), и/или о давлении в шинах сельскохозяйственного тягача (1), и/или о поле, и/или, в частности прогнозные, данные о погодных условиях и/или о дополнительном оборудовании, которое может быть установлено на сельскохозяйственном тягаче (1) для выполнения рабочего процесса.
10. Тягач по одному из предшествующих пунктов, отличающийся тем, что машинные параметры, определяемые на первой ступени, включают в себя вес балластных грузов и/или вид шин, и/или давление в шинах, и/или ширину колеи, и/или часть машинных параметров первой ступени могут быть выставлены вручную, в частности, в процессе монтажа, и/или на первой ступени рабочие агрегаты (2) могут быть откалиброваны.
11. Тягач по одному из предшествующих пунктов, отличающийся тем, что данные оптимизации второй ступени включают в себя данные о присоединении оборудования, в частности трехточечного механизма (6) сельскохозяйственного тягача (1), и/или о виде навесного оборудования (4) и/или, в частности актуальные, данные о погодных условиях.
12. Тягач по одному из предшествующих пунктов, отличающийся тем, что машинные параметры, определяемые на второй ступени, включают в себя высоту ходовой части, и/или частоту вращения вала (11) отбора мощности, и/или настройку верхней тяги (12) и/или нижней тяги (13).
13. Тягач по одному из предшествующих пунктов, отличающийся тем, что данные оптимизации третьей ступени включают в себя данные оптимизации, принятые от навесного оборудования (4), о скорости движения и/или о давлении масла, и/или о количестве масла, и/или о направлении движения, и/или о давлении по площади контакта, и/или о рабочей глубине, и/или о частоте вращения вала (11) отбора мощности, и/или о параметрах двигателя и коробки передач, в частности предельную нагрузку двигателя.
14. Тягач по одному из предшествующих пунктов, отличающийся тем, что машинные параметры, определяемые на третьей ступени, включают в себя скорость движения и/или количество масла, и/или направление движения, и/или частоту вращения вала (11) отбора мощности, и/или параметры двигателя и коробки передач, в частности предельную нагрузку двигателя.
15. Тягач по одному из предшествующих пунктов, отличающийся тем, что модуль (5) управления и регулирования выполнен с возможностью оптимизации на третьей ступени рабочих агрегатов (2) на основе данных оптимизации в отношении целевого показателя на основе регулятора поля характеристик и/или на основе предварительного выбора стратегии, и/или на основе фиксированных правил, и/или модуль (5) управления и регулирования выполнен с возможностью задания на третьей ступени навесному оборудованию (4) по меньшей мере одного машинного параметра для выставления и/или с возможностью передачи навесному оборудованию (4) данных о распознавании расположенного впереди поля.
| US 2017325394 A1, 16.11.2017 | |||
| US 2018329618 A1, 15.11.2018 | |||
| US 2017227969 A1, 10.08.2017 | |||
| US 2014053094 A1, 20.02.2014 | |||
| US 2018024549 A1, 25.01.2018 | |||
| EP 3243367 A2, 15.11.2017. |
