Предлагаемое изобретение относится к области технологии изготовления приборов оптоэлектроники, а именно к устройствам получения тонкопленочных покрытий для цифровых дисплеев, светоизлучающих диодов.
Известно устройство для напыления тонкопленочных покрытий (Установка ионно-магнетронного напыления нанокристаллических покрытий (КВАНТ) Сергеев В.П., Яновский В.П. и др./Физическая механика 7, Спецвыпуск Ч.2(2004) 333-336), которое взято за прототип. Устройство для напыления пленок содержит вакуумную камеру, магнетронный и ионный источники, вращающийся предметный стол с подложками, нагреватели, систему управления вращением предметного стола.
Недостатком известного устройства являются недостаточные функциональные возможности в части управления толщиной напыленного слоя за один цикл (оборота предметного), первоначально представляющего собой островки наносимых пленок перед последующим ионным травлением в этом же цикле для получения текстуры и возможности самого ионного травления, управляемого только током травления.
Целью предлагаемого технического решения является расширение функциональных воможностей устройств в части управления текстурой и шероховатостью пленок.
Поставленная цель достигается тем, что в устройство для напыления тонкопленочных покрытий, содержащее вакуумную камеру, магнетронный и ионный источники, вращающийся планетарный механизм (карусель), нагреватели, систему управления скоростью и направлением вращения планетарного механизма (карусели), дополнительно введены энкодер, соединенный с осью вращения карусели с подложками и контроллер, выполненный с возможностью сканирования заданное число раз подложек перед зоной магнитронного напыления и перед ионным пучком, при этом ко входу контроллера подключен выход энкодера, а к выходу контроллера - система управления скоростью и направлением вращения планетарного механизма.
Связь вновь вводимых признаков и достижения цели заключается в следующем.
Контроллер по энкодеру определяет момент выхода карусели с подложками из зоны магнетронного напыления (справа) и, в соответствии с установкой параметров, меняет направление вращения карусели до момента выхода подложек из зоны напыления (слева). Далее контроллер снова меняет направление вращения карусели и, таким образом, происходит сканирование подложек перед зоной магнетронного напыления в заданное на контроллере число раз. Аналогично контроллер с помощью энкодера управляет сканированием подложек перед ионным пучком на заданное контроллером число раз. Это позволяет оперативно подбирать и оптимизировать толщину напыленного и стравливаемого слоя с целью получения нужной степени текстуры, шероховатости, прозрачности и электропроводности пленок, тем самым, повышая функциональные возможности устройства.
Описание устройства в статике
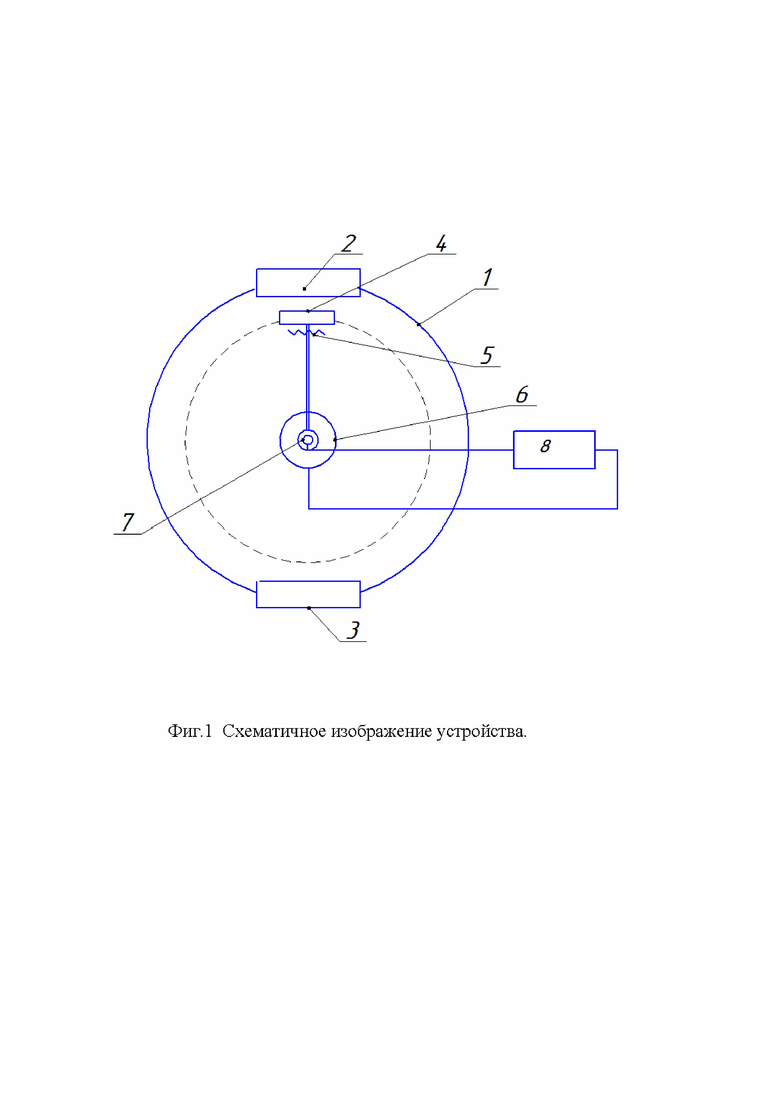
На фиг.1 представлено схематичное изображение устройства.
Устройство содержит вакуумную камеру 1, которая содержит магнетронный источник 2, ионный источник 3, вращающийся планетарный механизм 6 с подложками 4, нагреватель 5, при этом в вакуумной камере дополнительно размещены вращающийся планетарный механизм 6, выполненный с возможностью размещения подложек 4, систему управления скоростью и направлением вращения планетарного механизма 6, энкодер 7, соединенный с осью вращения планетарного механизма 6 с подложками 4, контроллер 8 сканирования, вход которого подключен к выходу энкодера 7, а выход к системе управления вращением планетарного механизма 6.
Устройство работает следующим образом. После ионной очистки подложек с использованием ионного источника 3 включается магнетрон. После выхода подложек из зоны напыления магнетронного источника 2 справа (при вращении карусели по направлению часовой стрелки, фиг.1) контроллер 8 сканирования определяет этот момент по показаниям энкодера 7 и меняет направление вращения планетарного механизма на противоположное. После выхода подложек из зоны напыления справа (фиг.1) контроллер снова меняет направление вращения карусели. Так продолжается заданное в установках контроллера число раз для цикла напыление-травление. После того, как подложка достигла ионного источника, по аналогии с вышеописанным процессом сканирования магнетронным пучком происходит заданное на контроллере число раз изменение смены направления движения планетарного механизма 4 и сканирования ионным пучком подложек.
Таким образом, оператор имеет возможность задать толщину слоя покрытия, напыленного за цикл нанесения и травления.
Примеры конкретного осуществления
Пример 1
Производилось напыление прозрачных электропроводящих пленок оксида индия, легированного оловом, в кислородно - аргоновой смеси. Перед осаждением проводили ионную очистку в рабочей смеси газов. Напуск рабочей смеси проводили через ионный источник «Радикал М-100». Во время процесса осаждения планетарный механизм с 6-ю подложками поочередно проходил область воздействия распыления и область воздействия ионного источника. Цикл прохождения карусели повторялся до 500 раз. В качестве мишени использовался сплав In-Sn. Установка монтировалась на базе модернизированного агрегата вакуумного УРМ 3.279.029.
В табл.1 и на фиг.2,3 приведены экспериментальные результаты, полученные на заявляемом устройстве и иллюстрирующие влияние времени ионной обработки (количества сканирований) на параметры пленок ITO
Таблица 1. Зависимость области когерентного рассеяния (степени нанокристалличности) от времени ионной обработки
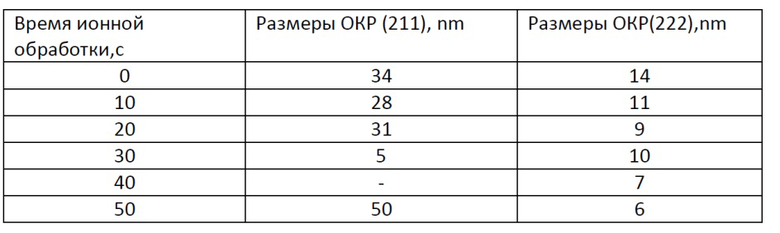
В табл.1 представлена зависимость области когерентного рассеяния (ОКР) от времени ионной обработки. Так минимальные значения ОКР соответствует времени обработки 40 сек.
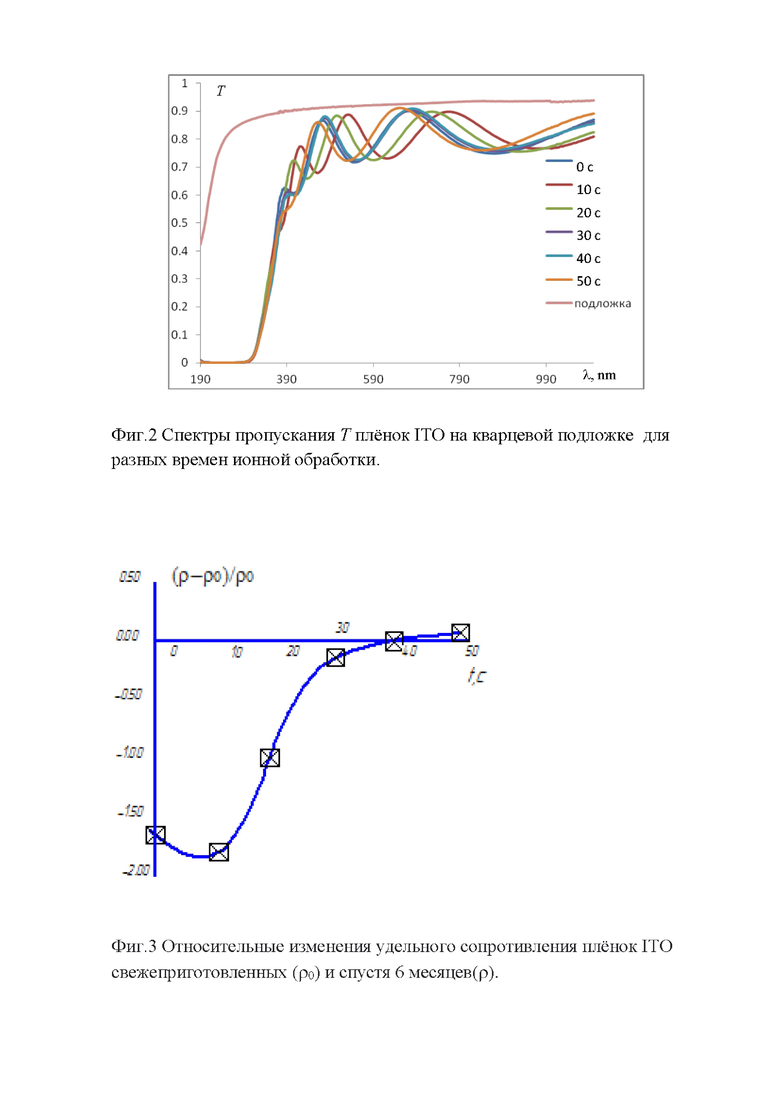
На фиг.2 приведены спектры пропускания T пленок ITO на кварцевой подложке для разных времен ионной обработки, свидетельствующие об уменьшении толщины пленки при увеличении времени ионной обработки с сохранением коэффициента пропускания.
На фиг.3 представлены относительные изменения удельного сопротивления пленок ITO свежеприготовленных 0(ρ0)) и спустя 6 месяцев ρ), иллюстрирующие тот факт, что увеличение времени ионной обработки приводит к уменьшению степени деградации пленок.
Таким образом, новые функциональные возможности устройства позволяют управлять свойствами пленок, в частности сохранением параметров со временем.
Пример 2
Производилось напыление пленок нитрида алюминия в азот - аргоновой смеси. Перед осаждением проводили ионную очистку в рабочей смеси газов. Напуск рабочей смеси проводили через ионный источник «Радикал М-100». Во время процесса осаждения планетарный механизм с 6-ю подложками поочередно проходил область воздействия распыления и область воздействия ионного источника. Цикл прохождения карусели повторялся до 500 раз. В качестве мишени использовался Al 99,999% чистоты. Установка монтировалась на базе модернизированного агрегата вакуумного УРМ 3.279.029.
На фиг.4 приведены экспериментальные результаты, полученные на заявляемом устройстве и иллюстрирующие влияние мощности сопутствующей ионной обработки во время напыления на параметры пленок AlN.
Из рисунка видно, что значения шероховатости уменьшаются с ростом тока ионной обработки. Т.е. ионно-лучевая обработка способствует снижению шероховатости растущих пленок нитрида алюминия, поверхность получается более гладкой и однородной. Более того, известно, что при значениях среднеквадратичной шероховатости подложки менее 4 нм, возможен синтез тонких пленок AlN с высокой ориентацией по оси c. Напротив, при наличии шероховатости поверхности подложки рост вдоль оси c становится маловероятным.
На фиг.5 представлен типичный спектр пропускания и отражения пленок нитрида алюминия при токе ионно-лучевой обработки 30 мА.
В табл.2 показаны экспериментальные результаты, иллюстрирующие влияние мощности сопутствующей ионной обработки на свойства пленок нитрида алюминия.
Таблица 2. Значения ширины запрещенной зоны и показателя преломления AlN
Таким образом, регулируя мощность сопутствующей ионно-лучевой обработки, можно регулировать структуру и свойства получаемых покрытий нитрида алюминия.
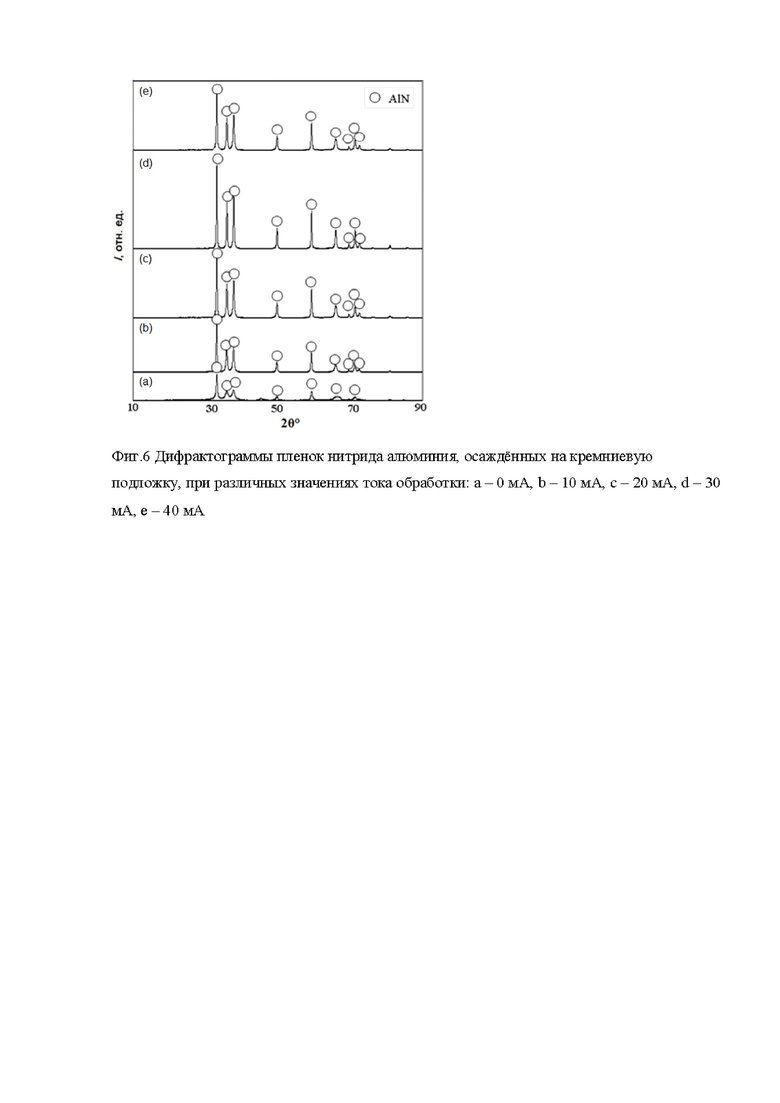
На фиг.6 можно увидеть дифрактограммы пленок нитрида алюминия, осажденных на подложку из кремния Si(100) при разных токах обработки:
a - 0 мА, b - 10 мА, c - 20 мА, d - 30 мА, e - 40 мА.
Из рисунка видно, что увеличение тока обработки приводит к увеличению степени кристалличности пленки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ нанесения покрытий в вакууме | 2017 |
|
RU2654991C1 |
| Установка карусельного типа для магнетронного напыления многослойных покрытий и способ магнетронного напыления равнотолщинного нанопокрытия | 2015 |
|
RU2606363C2 |
| ПЛАНАРНЫЙ МАГНЕТРОН С РОТАЦИОННЫМ ЦЕНТРАЛЬНЫМ АНОДОМ | 2022 |
|
RU2792977C1 |
| СПОСОБ МАГНЕТРОННОГО НАНЕСЕНИЯ ТОНКОПЛЕНОЧНЫХ ПОКРЫТИЙ ИЗ РАЗЛИЧНЫХ МАТЕРИАЛОВ И ИХ СОЕДИНЕНИЙ | 1993 |
|
RU2064525C1 |
| СПОСОБ НАНЕСЕНИЯ ЛАТУНИ МАРКИ Л63 НА СТЕКЛЯННЫЕ ИЗДЕЛИЯ | 2021 |
|
RU2765965C1 |
| СПОСОБ НАНЕСЕНИЯ АЛЮМИНИЯ НА СТЕКЛЯННЫЕ ИЗДЕЛИЯ | 2021 |
|
RU2765966C1 |
| Способ создания прозрачных проводящих композитных нанопокрытий (варианты) | 2016 |
|
RU2661166C2 |
| Способ изготовления высокотемпературного тонкопленочного тензорезистора | 1990 |
|
SU1820416A1 |
| СПОСОБ ИОННО-ПЛАЗМЕННОГО НАНЕСЕНИЯ МНОГОКОМПОНЕНТНЫХ ПЛЕНОЧНЫХ ПОКРЫТИЙ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2379378C2 |
| СПОСОБЫ НАНЕСЕНИЯ НА СТЕКЛЯННЫЕ ИЗДЕЛИЯ МЕТАЛЛИЧЕСКИХ ПОКРЫТИЙ ИЗ НИТРИДА ТИТАНА | 2021 |
|
RU2761391C1 |

Изобретение относится к устройству для напыления тонкопленочного покрытия. Упомянутое устройство включает вакуумную камеру, содержащую магнетронный и ионный источники и нагреватель. В вакуумной камере дополнительно размещены вращающийся планетарный механизм для размещения подложек, система управления скоростью и направлением вращения планетарного механизма, энкодер и контроллер. Энкодер соединен с осью вращения упомянутого планетарного механизма. Контроллер выполнен с возможностью сканирования заданное число раз подложек перед зоной магнитронного напыления и перед ионным пучком. Ко входу контроллера подключен выход энкодера, а к выходу контроллера – система управления скоростью и направлением вращения планетарного механизма. Обеспечивается уменьшение шероховатости и повышение текстуры покрытий – степени ориентации кристаллитов в определенном направлении. 6 ил., 2 табл., 2 пр.
Устройство для напыления тонкопленочного покрытия, включающее вакуумную камеру, содержащую магнетронный и ионный источники и нагреватель, отличающееся тем, что в вакуумной камере дополнительно размещены вращающийся планетарный механизм, выполненный с возможностью размещения подложек, система управления скоростью и направлением вращения планетарного механизма, энкодер, соединенный с осью вращения упомянутого планетарного механизма, и контроллер, выполненный с возможностью сканирования заданное число раз подложек перед зоной магнитронного напыления и перед ионным пучком, при этом ко входу контроллера подключен выход энкодера, а к выходу контроллера – система управления скоростью и направлением вращения планетарного механизма.
| RU 2021120868 A, 16.01.2023 | |||
| Установка карусельного типа для магнетронного напыления многослойных покрытий и способ магнетронного напыления равнотолщинного нанопокрытия | 2015 |
|
RU2606363C2 |
| US 20180254172 A1, 06.09.2018 | |||
| CN 0105970160 B, 09.06.2016 | |||
| Сергеев В.П | |||
| и др | |||
| Установка ионно-магнетронного напыления нанокристаллических покрытий (КВАНТ), Физическая механика 7, Спецвыпуск Ч.2, 2004, 333-336. | |||

