Изобретение относится к встроенной мебели и предназначено для хранения личных вещей под потолком помещения и высвобождении полезной площади жилого помещения.
Из уровня техники известны подъемные устройства, предназначенные для поднятия, хранения, поддержки и обеспечения доступа на уровне пола к аудиовизуальным объектам, таким как проекторы.
Из документа US 3759475 А, опубл. 18.09.1973 известен подъемный механизм электронного модуля, установленного в стойке, как для хранения, так и для использования. Механизм включает в себя расположенные рядом ножничные двухзвенные соединения. Каждый передний и задний концы механизма имеют четыре точки поворота: на заднем конце механизма две верхние точки поворота шарнирно соединены с задней частью стойки, а две нижние точки поворота поддерживают ролик качения, который катится вертикально вдоль задняя стенка стойки; на переднем конце механизма две верхние точки поворота шарнирно соединены с задней частью модуля, а две нижние точки поворота поддерживают элемент качения, который катится вертикально вдоль задней стенки модуля.
Так же из уровня техники известно приспособление для хранения с возможностью вертикального перемещения, с применением реверсивного электродвигателя, и предназначенное для хранения в верхней части помещения, и содержащее ящик, к которому крепится механизм ножничного типа (RU 95480 U1, опубл. 10.07.2010).
Ближайшим аналогом является устройство для хранения наверху, которое включает платформу, пару разнесенных ножничных механизмов, каждый ножничный механизм имеет первую вращающуюся точку крепления к указанной платформе и вторую поступательную точку крепления к указанной платформе, а также подпружиненный натяжной механизм. Сконфигурирован для поддержания указанной платформы в приподнятом состоянии, когда доступ к указанным необходимо хранящиеся предметы убрать, и в опущенном состоянии, когда необходим доступ к хранящимся предметам, указанный подпружиненный натяжной механизм сконфигурирован так, чтобы позволить человеку вручную опускать указанную платформу с указанного приподнятого в указанное пониженное состояние и вручную поднять указанную платформу из указанного опущенного состояния в указанное поднятое состояние (см. US 11382422 B, 22.07.2022).
Недостаток аналога заключается в том, что поднимать и опускать устройство можно только вручную.
В заявленном изобретении эта проблема решается за счет оборудования электромеханическим приводом для опускания контейнера для хранения на уровень удобный для укладки / изъятия личных вещей стоя на полу помещения.
Технический результат заключается в повышении грузоподъемности системы хранения под потолком помещения, за счет выполнения конструкции подъемного механизма ножничного типа и электродвигателя, обеспечивающего автоматизированные подъем/опускание контейнера, а также за счет блока управления и кнопки управления, позволяющие остановить подъем или опускание ящика на любом удобном уровне.
Технический результат достигается системой хранения под потолком помещения, содержащей подъемный ножничный механизм и контейнер для хранения, причем содержит несущую раму и раму для контейнера, соединенные с двух противолежащих сторон ножничными механизмами, при этом спицы каждого ножничного механизма соединены с рамами посредством блоков роликов и неподвижными петлями, для обеспечения движения блоков роликов вдоль двух противолежащих сторон каждой рамы установлены направляющие, при этом на несущей раме расположен вал намотки троса, который приводится во вращение электродвигателем, концы троса крепятся к двум противолежащим сторонам рамы с контейнером, далее трос проходит через ролики намотки троса, установленные на двух противолежащих сторонах несущей рамы, и заходит на вал намотки троса, система приводится в действие посредством блока управления, который запускается в работу кнопкой управления подъемом - спуском, для предотвращения несанкционированного опускания системы хранения на рамах установлен электромеханический замок, а на ящике установлен датчик световой завесы, для защиты пользователя во время работы системы хранения, для контроля положения ящика установлен индуктивный датчик.
В частном случае реализации система для хранения под потолком помещения дополнительно оснащена дальномером.
В частном случае реализации дно ящика с внешней стороны снабжено лампой освещения.
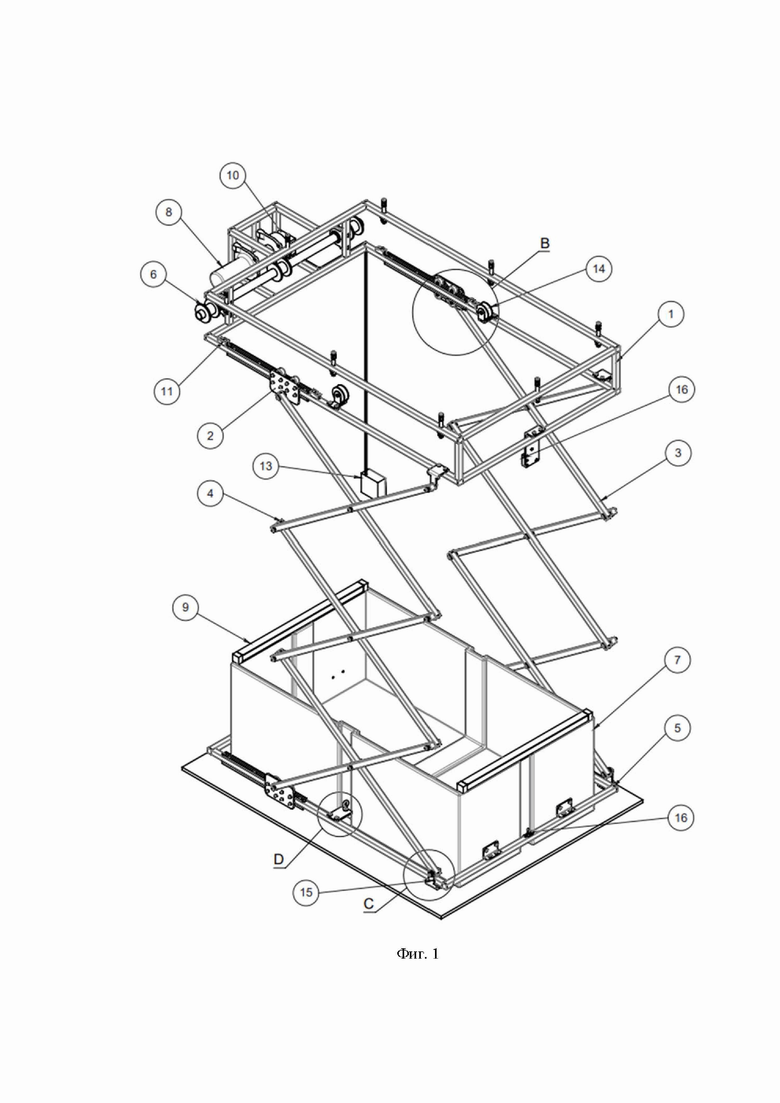
Сущность заявленной системы хранения под потолком помещения поясняется чертежами, где на фиг. 1 представлена система хранения под потолком помещения в разложенном виде, где:
1 - несущая рама;
2 - блоки роликов скольжения;
3 - спицы подвески контейнера правая;
4 - спицы подвески контейнера левая;
5 - рама контейнера;
6 - вал намотки троса;
7 - контейнер хранения;
8 - электродвигатель;
9 - датчик световой завесы;
10 - блок управления;
11 - датчик индуктивный;
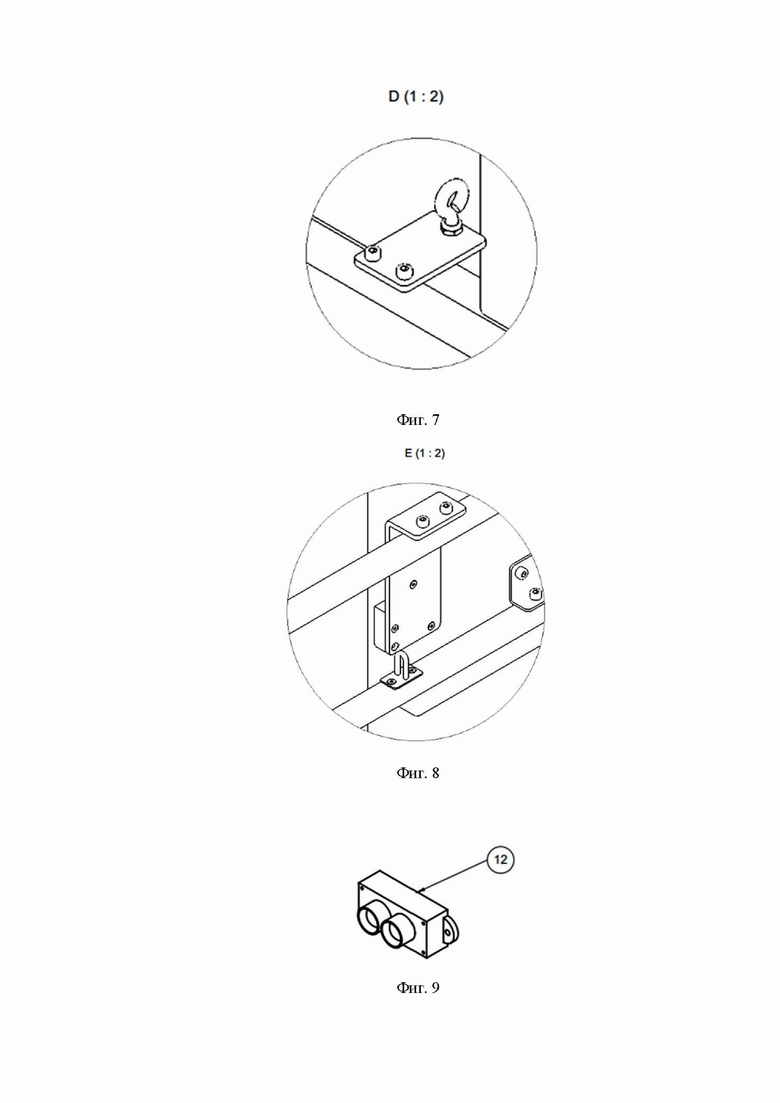
12 - дальномер;
13 - кнопка управления подъемом-спуском;
14 - ролик намотки троса;
15 - петля неподвижного крепления спиц;
16 - электромеханический замок.
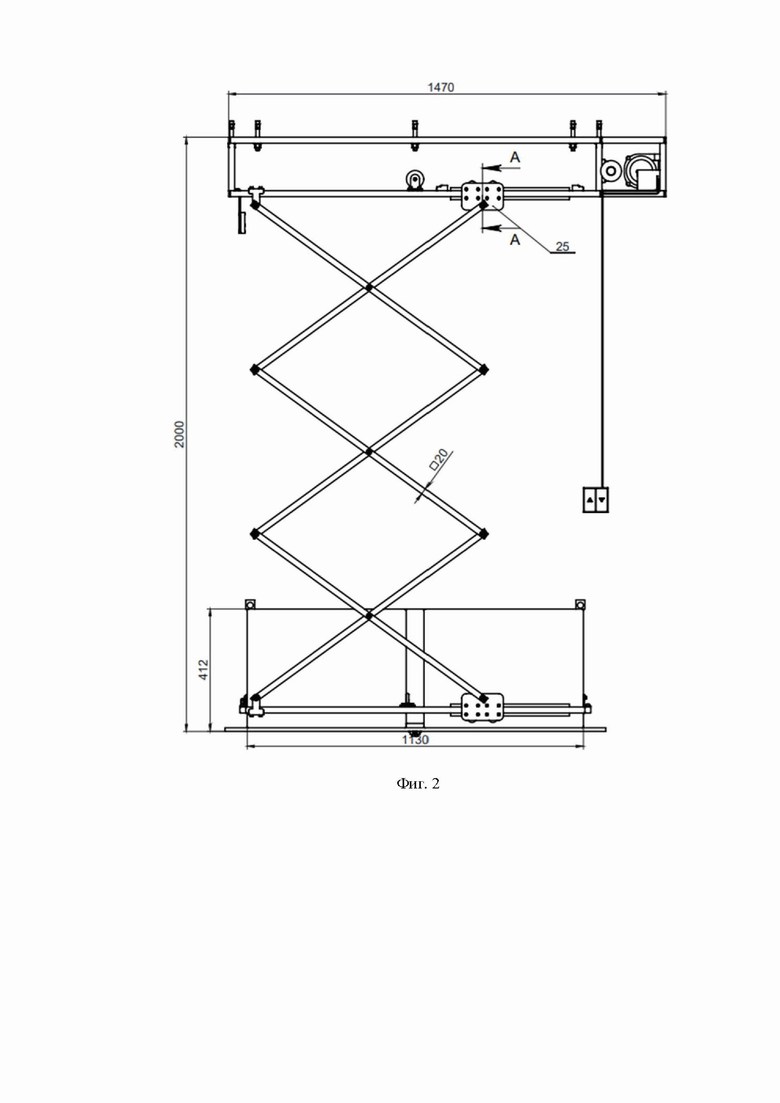
На фиг. 2 представлена система хранения под потолком помещения вид сбоку.
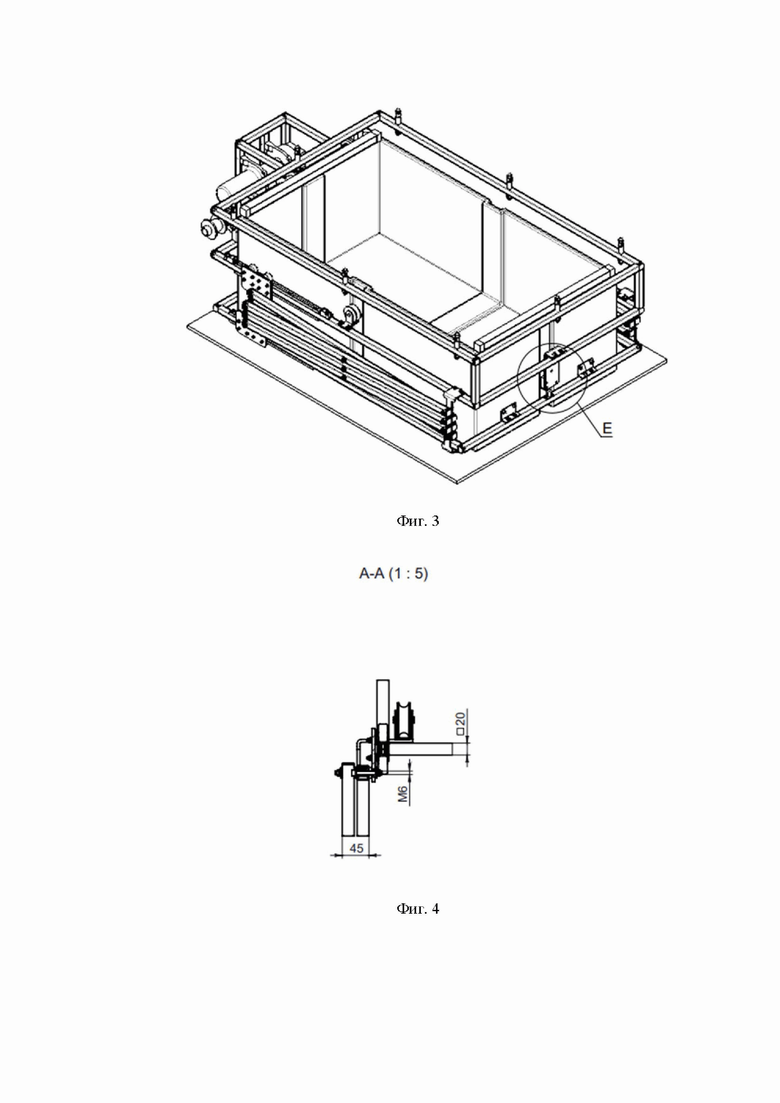
На фиг. 3 представлена система хранения под потолком помещения в сложенном виде.
На фиг. 4 представлен блок роликов скольжения в разрезе.
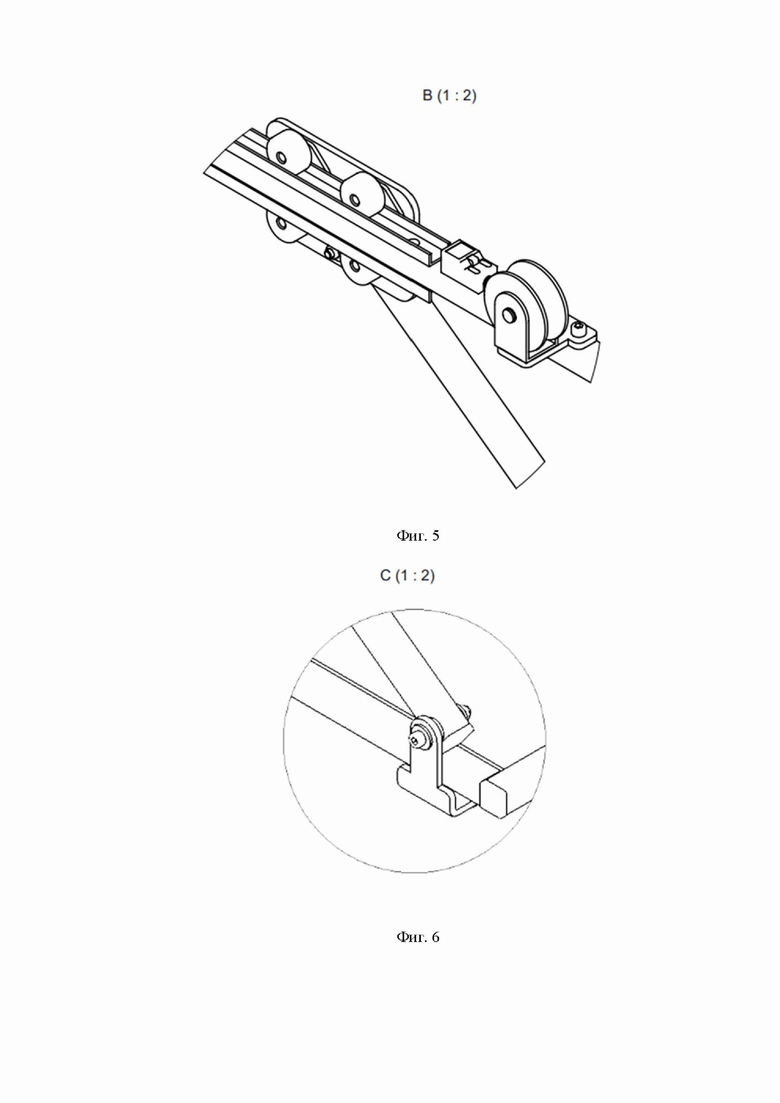
На фиг. 5 представлен блок роликов скольжения в увеличенном виде.
На фиг. 6 представлен увеличенный вид неподвижных петель.
На фиг. 7 представлен увеличенный вид элементов крепления троса.
На фиг. 8 представлен увеличенный вид электромеханического замка.
На фиг. 9 представлен дальномер.
Система хранения под потолком помещения состоит из двух рам, несущая рама 1 предназначена для крепления под потолком и выполнена в виде прямоугольного параллелепипеда из металлических планок, преимущественно квадратного сечения. На боковой стороне которого дополнительно прикреплена рама меньшего размера, в которой размещается электродвигатель 8 с блоком управления 10. Электродвигатель 8 передает вращательное движение на вал намотки троса 6. Электродвигатель 8, блок управления 10, вал намотки троса 6 находятся в защитном коробе.
Система хранения под потолком помещения приводится в действие с помощью приводной кнопки управления подъемом-спуском 13 или пультом дистанционного управления, приводя в движение электродвигатель 8 посредством блока управления 10.
Трос крепиться к раме 5 контейнера 7, посредством элементов крепления (фиг. 7). Далее трос проходит через ролики намотки троса 14. Ролики намотки троса 14 установлены в нижней части несущей рамы 1 на двух противолежащих сторонах рамы. Далее трос заходит с двух противоположных сторон на вал намотки троса 6.
Система хранения приводится в действие с помощью кнопки управления подъемом-спуском 13 или пультом дистанционного управления, приводя в движение электродвигатель 8, который вращает вал 6 с тросом. В случае подъема системы хранения трос наматывается на вал 6, а спицы ножничных механизмов 3 и 4 складываются. В случае опускания системы хранения трос разматывается, а спицы ножничных механизмов 3 и 4 раскладываются.
Для исключения не санкционирования опускания системы хранения под потолком используется электромеханический замок 16, который состоит из двух частей, одна часть крепиться к несущей раме 1, вторая часть крепиться к раме контейнера. Электромеханический замок 16 перед опусканием системы хранения разблокируется и блокируется после того как подъем системы хранения завершен.
На нижней части несущей рамы с двух противолежащих сторон установлены направляющие П-образной формы, по которым перемещается блок роликов скольжения 2 во время сложения или опускания системы хранения. Блок роликов скольжения 2 представляет собой металлическую пластину прямоугольной формы, на поверхности которой установлено 4 ролика, по два на каждую продольную сторону пластины. При этом направляющие установлены сверху и снизу планки несущей рамы 1, а блок роликов скольжения 2 устанавливается таким образом, чтобы охватывать планку несущей рамы, при этом два ролика устанавливаются в направляющую снизу, и два ролика устанавливаются в направляющую сверху, таким образом исключается выход роликов из направляющих.
Спицы подвески контейнера 3 и 4, представляют собой два ножничных механизма, каждый из которых верхними концами крепится к несущей раме 1, а нижними концами к раме 5 контейнера 7. При этом с продольных сторон несущей рамы 1 в направляющие установлены ролики блока роликов скольжения 2, а блок роликов скольжения 2 соединен с одним верхним концом спицы, а второй конец прикреплен к этой же продольной стороне несущей раме 1 посредством петли не подвижного крепления спиц 15. Спицы подвески установлены с двух противолежащих сторон несущей рамы 1 и с двух противолежащих сторон рамы 5 контейнера 7. Крепление нижних концов спиц подвески справа и слева к раме 5 контейнера 7 идентично креплению спиц к несущей раме 1.
В раме 5 установлен контейнер 7, при этом рама также выполнена из металлических планок, скрепленных сваркой и образующих прямоугольник.
На контейнер 7 установлен датчик световой завесы 9 для защиты пользователя во время работы системы хранения, а для контроля положения контейнера установлен индуктивный датчик 11.
Также система хранения под потолком дополнительно оснащена дальномером 12. Дальномер необходим для измерения расстояния от дна ящика до объекта под ящиком. При нахождении постороннего объекта под ящиком в момент нажатия кнопки опускания дальномер позволяет измерить расстояние до объекта под ящиком и если оно меньше чем заданное при монтаже устройства, то опускание ящика не будет происходить.
Дополнительно дно ящика, оформлено в виде лампы освещения и датчиками переполнения контейнера хранения, датчиками препятствий спуску контейнера. Питание лампы освещения происходит от бытовой сети напряжением 220 Вольт. Питание в постоянном режиме подается на блок управления датчиками и кнопку управления подъемом-спуском.
При нажатии кнопки управления подъемом-спуском 13 при помощи дальномера 12 блоком управления 10 производится замер расстояния до объекта под ящиком. Если расстояние не менее установленного при монтаже блоком управления 10 подается питание на электромеханический замок 16 на открытие замка и параллельно на электродвигатель 8 для включения размотки троса. Происходит размотка троса с вала 6 и отпускание контейнера хранения 7. При достижении крайнего положения в опущенном состоянии, блок роликов скольжения 2 воздействует на индуктивный датчик 11, блок управления 10 размыкает питание электродвигателя 8 в сторону размотки вала. Опускание останавливается.
При нажатии кнопки управления подъемом-спуском 13 блок управления 10 получает состояние световой завесы и при отсутствии преграды у световой завесы (что означает, что бытовые вещи, размещенные в контейнере хранения 7, не поднимаются выше верхней плоскости контейнера хранения) блок управления 10 подает питание на электродвигатель 8 для включения вращения в сторону намотки троса. При достижении крайнего положения в поднятом состоянии, блок роликов скольжения 2 воздействует на индуктивный датчик 11 и блок управления 10 прекращает подачу питания на электродвигатель 8 в сторону намотки троса вала. Подъем контейнера хранения останавливается.
В крайнем поднятом положении электромеханический замок 16 фиксации замыкается механически.
Лампа освещения, встроенная в дно ящика, включается аналогично любому другому осветительному прибору отдельным выключателем света.
Диапазон высот помещения, для которого может использоваться система хранения под потолком 2,6-5 метров. Диапазон массы вещей для хранения: до 100 кг.
Контейнер 7 может быть выполнен любого размера, предельные размеры контейнера для хранения (Ш×Д×В) 1,6 м × 1,6 м × 0,7 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОФИЛОГРАФ ДЛЯ ВЕРТИКАЛЬНОГО ЗОНДИРОВАНИЯ МОРСКОЙ СРЕДЫ | 2012 |
|
RU2499280C2 |
| СПОСОБ ПОСТАНОВКИ МИННЫХ ЗАГРАЖДЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2833085C1 |
| ЛЕБЕДКА ДЛЯ ЗВУКОВОГО ОБОРУДОВАНИЯ | 2019 |
|
RU2731014C1 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ ВЗРЫВОБЕЗОПАСНЫЙ СТОЛ | 2018 |
|
RU2716031C1 |
| ТРОЛЛЕЙБУС С ЧАСТИЧНОЙ НЕЗАВИСИМОСТЬЮ ОТ КОНТАКТНОЙ СЕТИ | 2012 |
|
RU2493027C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЭНЕРГИИ К ПОДВИЖНЫМ ОБЪЕКТАМ | 1991 |
|
RU2048422C1 |
| РЕЦЕПТОР ДЛЯ СРАВНЕНИЯ КОДОВ НА ДВУХ И БОЛЕЕ ФУТЛЯРАХ | 2004 |
|
RU2282892C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ, ОТБОРА ПРОБ ИЛИ ИЗВЛЕЧЕНИЯ В ТОЧНОМ МЕСТЕ ПОД ПЛИТОЙ | 1999 |
|
RU2216719C2 |
| ПОДЪЕМНАЯ КРОВАТЬ | 2010 |
|
RU2413446C1 |
| Автоматизированная прецизионная система доставки груза по воздуху | 2021 |
|
RU2775656C1 |
Изобретение относится к встроенной мебели и предназначено для хранения личных вещей под потолком помещения и высвобождения полезной площади жилого помещения. Система хранения под потолком помещения содержит подъемный ножничный механизм и контейнер для хранения. Система хранения также содержит несущую раму и раму для контейнера, соединенные с двух противолежащих сторон спицами подвески контейнера, выполненными в виде ножничных механизмов. Спицы подвески контейнера каждого ножничного механизма соединены с рамами посредством блоков роликов и неподвижными петлями, для обеспечения движения блоков роликов вдоль двух противолежащих сторон каждой рамы установлены направляющие. На несущей раме расположен вал намотки троса, который приводится во вращение электродвигателем. Концы троса крепятся к двум противолежащим сторонам рамы с контейнером, далее трос проходит через ролики намотки троса, установленные на двух противолежащих сторонах несущей рамы, и заходит на вал намотки троса. Система приводится в действие посредством блока управления, который запускается в работу кнопкой управления подъемом-спуском. Для предотвращения несанкционированного опускания системы хранения на рамах установлен электромеханический замок, а на стенках контейнера установлен датчик световой завесы, для защиты пользователя во время работы системы хранения, и для контроля положения контейнера установлен индуктивный датчик. Технический результат заключается в повышении грузоподъемности системы хранения под потолком помещения. 4 з.п. ф-лы, 9 ил.
1. Система хранения под потолком помещения, содержащая подъемный ножничный механизм и контейнер для хранения, отличающаяся тем, что содержит несущую раму и раму для контейнера, соединенные с двух противолежащих сторон спицами подвески контейнера, выполненными в виде ножничных механизмов, при этом спицы подвески контейнера каждого ножничного механизма соединены с рамами посредством блоков роликов и неподвижными петлями, для обеспечения движения блоков роликов вдоль двух противолежащих сторон каждой рамы установлены направляющие, при этом на несущей раме расположен вал намотки троса, который приводится во вращение электродвигателем, концы троса крепятся к двум противолежащим сторонам рамы с контейнером, далее трос проходит через ролики намотки троса, установленные на двух противолежащих сторонах несущей рамы, и заходит на вал намотки троса, система приводится в действие посредством блока управления, который запускается в работу кнопкой управления подъемом-спуском, для предотвращения несанкционированного опускания системы хранения на рамах установлен электромеханический замок, а на стенках контейнера установлен датчик световой завесы, для защиты пользователя во время работы системы хранения, и для контроля положения контейнера установлен индуктивный датчик.
2. Система хранения по п. 1, отличающаяся тем, что содержит дальномер.
3. Система хранения по п. 1, отличающаяся тем, что несущая рама и рама контейнера выполнены из металлических планок.
4. Система хранения по п. 2, отличающаяся тем, что снизу и сверху металлической планки установлены направляющие, выполненные П-образной формы.
5. Система хранения по п. 4, отличающаяся тем, что блок роликов скольжения выполнен таким образом, чтобы охватывать планку с направляющими.
| МИНИЗДАНИЕ | 1995 |
|
RU2095531C1 |
| US 5366203 A, 22.11.1994 | |||
| US 2006066188 A1, 30.03.2006 | |||
| CN 111634844 A, 08.09.2020 | |||
| УНИВЕРСАЛЬНАЯ ЛЕСТНИЦА | 1995 |
|
RU2101453C1 |
| CN 206487045 U, 12.09.2017. | |||
