Изобретение относится к изделиям оборонной техники, в частности к наземным мобильным системам дистанционного минирования.
Из уровня техники известен ряд технических решений, направленных на обеспечение процесса установки минных полей в непосредственной близости от противника, а также в ходе боя, а именно:
Гусеничный минный заградитель («Техническое описание и инструкция по эксплуатации». – М.: Воениздат. МО, Москва, 1971 г.), содержащий бронированную гусеничную базовую машину, специальное оборудование, включающее кассеты для мин серии ТМ-62 и выдающий механизм, состоящий из выдающих ленточных транспортеров, отсчитывающих и разрешающих устройств.
Минный заградитель на гусеничном шасси (Патент RU 214742, F41Н 7/10 опубл. 11.11.2022), содержащий корпус шасси с отделением управления с рабочими местами членов экипажа, программно-техническим комплексом и системой управления постановкой мин, моторно-трансмиссионным отделением и отделением оборудования с элементами гидравлической и электрической систем управления минированием, платформу, установленную на несущей конструкции шасси и оборудованную бортами, транспортно-пусковые контейнеры с корпусом из броневой стали для размещения и метания мин, шарнирно установленные на опорно-поворотных устройствах платформы и снабженные механизмами установки корпуса контейнера на заданный угол метания и индивидуальными приборами управления стрельбой, комплекс защиты от оружия массового поражения, корпус и борта платформы выполнены из броневой стали с обеспечением противопульной защиты от крупнокалиберных пуль и осколков осколочно-фугасных снарядов, отделения управления, оборудования и моторно-трансмиссионное отделение отделены перегородками, установленными с обеспечением герметичности внутренних объемов указанных отделений, при этом отделение управления размещено в носовой части корпуса и выполнено в виде бронированной герметизированной кабины управления.
Минный заградитель на колесном шасси (Патент RU 220354, F41Н 7/10 опубл. 11.09.2023), содержащий платформу, съемно установленную на базовое шасси, транспортно-пусковые контейнеры для размещения и метания мин с корпусом из броневой стали, шарнирно установленные на опорно-поворотных устройствах платформы и снабженные механизмами установки корпуса контейнера на заданный угол метания и индивидуальными приборами управления стрельбой, гидравлическую систему управления положением ТПК, систему управления минированием и программно-технический комплекс, платформа выполнена в виде открытого сверху жесткого корпуса с бронированными бортами, смонтированного на раме, которая установлена на основании коробчатой конструкции с закрытым днищем, при этом рама выполнена с настилом на верхней ее части и с металлической обшивкой нижней части с образованием закрытого внутреннего объема для обеспечения возможности размещения внутри платформы оборудования гидравлической системы и электронных блоков управления поворотом и подъемом ТПК, при этом основание образовано двумя продольными лонжеронами, связанными поперечными балками, и металлическими листами днища, поперечные балки рамы.
Минный заградитель на колесном шасси (Патент RU 220354, F41Н 7/10 опубл. 11.09.2023), содержащий платформу, съемно установленную на базовое автомобильное шасси 70202-0000310, ТПК для размещения и метания мин с корпусом из броневой стали, шарнирно установленные на опорно-поворотных устройствах платформы и снабженные механизмами установки корпуса контейнера на заданный угол метания и индивидуальными приборами управления стрельбой, гидравлическую систему управления ТПК, систему управления минированием и пр.
Минный заградитель (Патент RU 95109826, F41Н 7/10 опубл. 10.04.1997 г.), включающий самоходное шасси с несущим броневым, водоизмещающим корпусом в котором размещен подъемник с закрепленной на ней установкой минирования. На поворотной платформе установки минирования на ползунах установлен контейнер для кассет с минами, состоящий из двух плоских шарнирно соединенных с основанием блоков.
Универсальный минный заградитель (Патент RU 2185590, F41Н 7/10 опубл. 20.07.2002), содержащий базовую машину на гусеничном ходу с бронированным минным отделением, в котором размещена рама с опорными плитами для кассетных модулей, систему управления минированием и загрузочное устройство.
Общим недостатком представленных выше технических решений является отсутствие возможности обеспечения процесса безопасной, для экипажа и собственно самого образца, установки минных полей в непосредственной близости от противника, а также в ходе боя, в виду недостаточной скрытности используемых базовых шасси заградителей с поршневым двигателем в оптическом, акустическом и инфракрасном спектре. С учетом роста могущества и точности наведения боеприпасов данное обстоятельство создает предпосылки к огневому поражению минного заградителя вооружением противника. Данные недостатки негативно сказываются на живучести и защищенности образца и экипажа на поле боя, следовательно, на его боевой эффективности.
Представленные выше недостатки частично устранены в самоходной мине «Gnom Kamikadze» (https://temerland.com/ru/resheniya/platforma-gnom-kamikadze-pod-tankovuyu-minu/), состоящей из колесной электрической трансмиссии с управляемой подвеской, камер наблюдения, дистанционного управления и транспортного контейнера для размещения мины.
Вместе с тем, очевидно, что самоходная мина, являясь средством одноразового использования, не может быть применена для постановки минных заграждений. Таким образом, недостатками самоходной мины является его низкая эффективность ввиду того, что:
самоходная мина, являясь средством одноразового использования, не может быть применена для постановки минных полей;
использована колесная ходовая часть пониженного профиля, проходимость которой на пересеченной или лесистой местности весьма ограничена.
В публикации (https://topwar.ru/201057-samohodnaja-mina-gnome-kamikaze-ukrainskaja-realizacija-neudachnoj-koncepcii.html) показана многоразовая версия самоходной мины на представленной выше платформе, выбранная за прототип и состоящая из колесной электрической трансмиссии с управляемой подвеской, камер наблюдения, дистанционного управления и откидного транспортного контейнера для перевозки и укладки одной мины на поверхность грунта.
Недостатком прототипа является его низкая эффективность, обусловленная недостаточной проходимостью колесного движителя, а также значительное время постановки минного поля ввиду того, что транспортный контейнер рассчитан на перевозку лишь одной мины.
Принимая во внимание низкую проходимость колесного движителя и конструкцию откидного транспортного контейнера для перевозки и укладки одной мины на поверхность грунта, становится очевидным, что быстрая и эффективная постановка минного поля роботехническим комплексом предложенной конструкции обеспечена быть не может.
Техническим результатом является повышение эффективности устройства для постановки минных заграждений.
Технический результат достигается тем, что согласно способу постановки минных заграждений доставку мин в заданный район производят с применением дистанционно-управляемого робототехнического комплекса с гусеничным движителем, при этом осуществляют укладку мин в транспортно-выдающие контейнеры и приводят их в боевое положение, приводят в рабочее положение выдающий механизм, вводят в бортовую систему управления робототехническим комплексом маршрутное задание либо управляют его движением в заданную точку в ручном режиме, осуществляют минирование в заданном районе в соответствии с заданием, после укладки всех мин, находящихся в обоих транспортно-выдающих контейнерах, робототехнический комплекс в автоматическом режиме или в режиме ручного управления возвращают в тыловой район для пополнения запаса мин.
Также заявлено устройство для постановки минных заграждений, содержащее робототехнический комплекс на гусеничном ходу на надгусеничных полках которого размещают транспортно-выдающие контейнеры для мин. На передней стенке каждого транспортно-выдающего контейнера размещают выдающий механизм, состоящий из электродвигателя, на валу которого жестко на шпонке закреплена катушка с зафиксированным на её оси тросом, пропущенным вокруг ролика, размещенного на боковой стенке транспортно-выдающего контейнера, и далее через зазор между корпусом и взрывателем первой мины, второй конец троса жестко фиксируется на противоположной от ролика стенке транспортно-выдающего контейнера. На днище каждого транспортно-выдающего контейнера размещают концевой электромеханический выключатель с подпружиненным роликом, электрической связью соединённый с электронным блоком управления и спусковой транспортер.
Предложение поясняется рисунками.
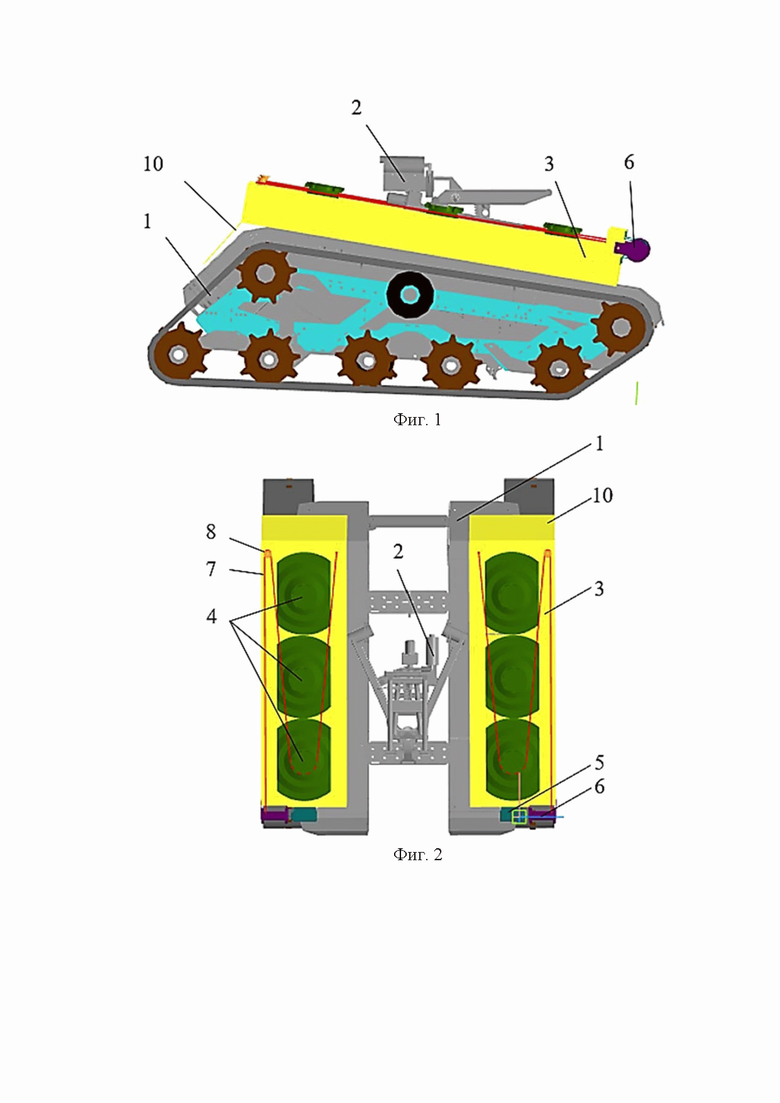
На фиг. 1 изображен робототехнический комплекс с размещенным на нем устройством для постановки минных заграждений (вид сбоку).
На фиг. 2 изображен робототехнический комплекс с размещенным на нем устройством для постановки минных заграждений (вид сверху).
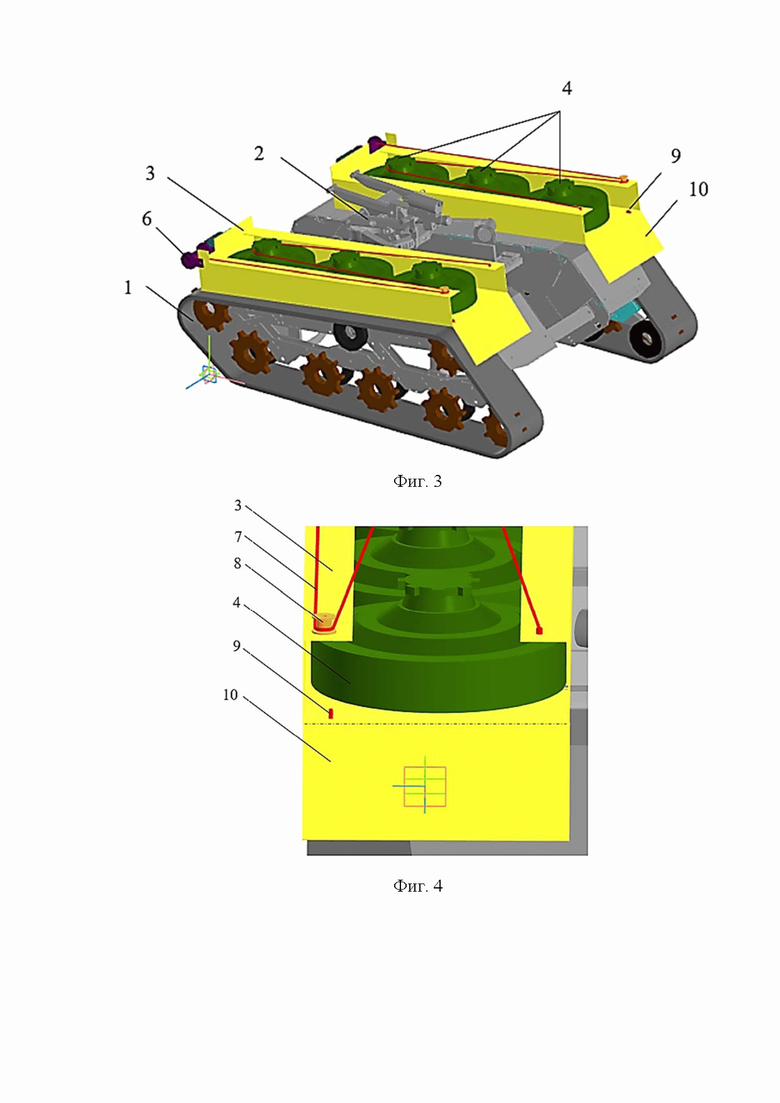
На фиг. 3 изображен робототехнический комплекс с размещенным на нем устройством для постановки минных заграждений (вид общий).
На фиг. 4 изображено устройство транспортно-выдающего контейнера.
Устройство для постановки минных заграждений содержит: дистанционно управляемый робототехнический комплекс 1 на гусеничном ходу с электрическими тяговыми двигателями, оснащенный камерами и боевым модулем 2, на надгусеничных полках робототехнического комплекса размещают транспортно-выдающие контейнеры (ТВК) 3, в который укладывают мины 4, на передней стенке ТВК 3 размещен и зафиксирован болтовым соединением выдающий механизм, состоящий из электродвигателя 5 на валу которого жестко на шпонке закреплена катушка 6 с зафиксированным на оси тросом 7, огибающим ролик 8, размещенный на стенке ТВК 3, и далее пропущенный в зазоре между корпусом и взрывателем первой в укладке ТВК 3 мины. Второй конец троса жестко фиксируется на противоположной от ролика стенке ТВК 3. На днище ТВК 3 размещают и жестко, болтовым соединением, закрепляют концевой электромеханический выключатель 9 с подпружиненным роликом, электрической связью соединённый с электронным блоком управления (на фиг. не показан) и спусковой транспортер 10.
Предлагаемое устройство для постановки минных заграждений функционирует следующим образом. Минные заграждения создаются на танкоопасных направлениях как в ходе ведения боя, так и при его подготовке. Перед выходом робототехнического комплекса 1 для выполнения задачи оператор укладывает мины 4 в ТВК 3 и приводит их в боевое положение. В укладке используются мины типа ТМ-62М, ТМ-62ПЗ, ТМ-89. Далее оператор приводит в рабочее положение выдающий механизм, для чего трос 7 заводится вокруг ролика 8, размещенного на стенке ТВК 3 и далее заводит его в зазор между корпусом и взрывателем первой в каждой укладке ТВК 3 мины 4. Далее по распоряжению оператора с электронного блока управления (на фиг. не показан) отправляется команда на создание рабочего натяжения троса 7 за счет намотки его излишков на катушку 6 вращение которой обеспечивается электродвигателем 5. Удержание мин 4 от выпадения из ТВК 3 при движении робототехнического комплекса обеспечивается концевым электромеханическим выключателем 9 с подпружиненным роликом, который также выполняет функцию прерывания работы выдающего механизма.
Укладка мин производится на поверхность грунта с задаваемым шагом минирования без маскировки. Шаг минирования задается оператором в зависимости от задач, потребной длинны и плотности минного поля. На основании алгоритма, заданного оператором, происходит срабатывание выдающего механизма. В ходе срабатывания включается электродвигатель 5 одного из ТВК 3, в результате чего происходит наматывание троса 7 на катушку 6. В связи с уменьшением длины троса 7 (второй конец троса жестко закреплен на стенке ТВК) происходит вытеснение мин 4 из ТВК 3 в сторону противоположную от электродвигателя 5. Крайняя в укладке ТВК 3 мина за счет давления, создаваемого выдающим механизмом, преодолевая усилие подпружиненного ролика концевого электромеханического выключателя 9, вытесняется с ТВК 3 и далее, соскальзывая по спусковому транспортеру 10, укладывается на поверхность грунта. Возвращение подпружиненного ролика концевого электромеханического выключателя 9 в исходное положение, после прокатывания по нему мины является сигналом для электродвигателя 5 выдающего механизма о прекращении срабатывания. Следующее включение электродвигателя 5 производится автоматически в зависимости от запрограммированного оператором шага минирования.
Укладка мин может производится последовательно с ТВК одного борта, затем с ТВК другого, либо в шахматном порядке по очереди с одного и другого борта робототехнического комплекса.
Укладка мин может производится в автоматическом режиме по заданному оператором алгоритму или в режиме ручного управления.
После укладки всех мин, находящихся в обоих ТВК 3, робототехнический комплекс 1 в автоматическом режиме или в режиме ручного управления возвращают в тыловой район для пополнения запаса мин.
По сравнению с прототипом предлагаемое техническое решение позволяет повысить эффективность устройства для постановки минных заграждений
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство для постановки минных заграждений | 2023 |
|
RU2834487C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОЙ ЭВАКУАЦИИ НА БАЗЕ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2024 |
|
RU2838648C1 |
| Мобильный роботехнический комплекс | 2024 |
|
RU2828909C1 |
| Боевой модуль робототехнического комплекса с универсальным ложементом | 2024 |
|
RU2838709C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС С НОЖНИЧНЫМ ПОДЪЕМНИКОМ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2830637C1 |
| УСТРОЙСТВО АВТОМАТИЗАЦИИ НАВЕДЕНИЯ ПУСКОВОЙ УСТАНОВКИ ПРОТИВОТАНКОВОГО РАКЕТНОГО КОМПЛЕКСА "ФАГОТ" | 2024 |
|
RU2834077C1 |
| ЭВАКУАЦИОННЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2023 |
|
RU2824684C1 |
| МИННЫЙ ЗАГРАДИТЕЛЬ | 2007 |
|
RU2339896C1 |
| МИННЫЙ ЗАГРАДИТЕЛЬ | 2007 |
|
RU2339897C1 |
Изобретение относится к наземным мобильным системам дистанционного минирования. Cогласно способу постановки минных заграждений доставку мин в заданный район производят с применением дистанционно-управляемого робототехнического комплекса с гусеничным движителем. При этом осуществляют укладку мин в транспортно-выдающие контейнеры и приводят их в боевое положение. Приводят в рабочее положение выдающий механизм, вводят в бортовую систему управления робототехническим комплексом маршрутное задание, осуществляют минирование. После укладки всех мин робототехнический комплекс возвращают в тыловой район для пополнения запаса мин. Устройство для постановки минных заграждений установлено на робототехнический комплекс на гусеничном ходу. На надгусеничных полках робототехнического комплекса размещают транспортно-выдающие контейнеры для мин. На передней стенке каждого транспортно-выдающего контейнера размещают выдающий механизм, состоящий из электродвигателя, на валу которого жестко на шпонке закреплена катушка с зафиксированным на её оси тросом, пропущенным вокруг ролика, размещенного на боковой стенке транспортно-выдающего контейнера, и через зазор между корпусом и взрывателем первой мины. Второй конец троса жестко фиксируется на противоположной от ролика стенке транспортно-выдающего контейнера. На днище каждого транспортно-выдающего контейнера размещают концевой электромеханический выключатель с подпружиненным роликом, электрической связью соединённый с электронным блоком управления, и спусковой транспортер. Этим достигается эффективность устройства для постановки минных заграждений. 2 н. и 1 з.п. ф-лы, 4 ил.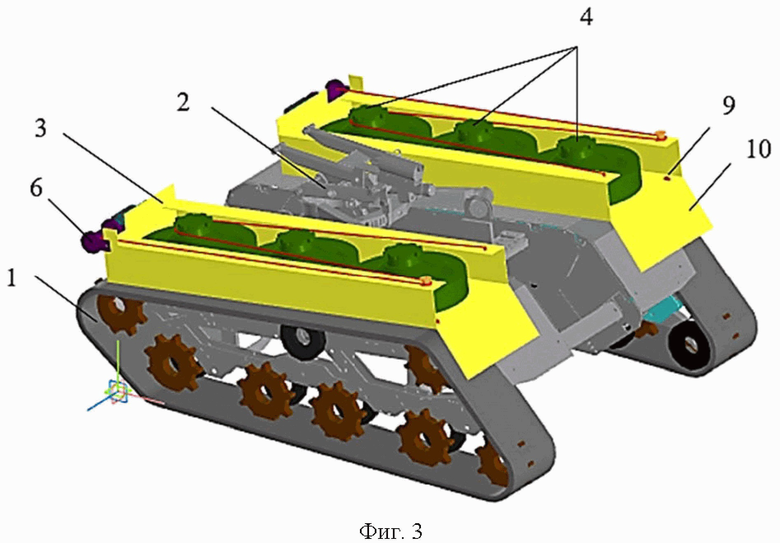
1. Устройство для постановки минных заграждений, установленное на дистанционно-управляемом робототехническом комплексе, содержащем электрическую трансмиссию, управляемую подвеску, камеры наблюдения, транспортный контейнер, электронный блок управления, гусеничный движитель, отличающееся тем, что на его надгусеничных полках размещены и жестко болтовым соединением закреплены транспортно-выдающие контейнеры, на стенках каждого из которых размещен и зафиксирован болтовым соединением выдающий механизм, состоящий из электродвигателя, на валу которого жестко на шпонке закреплена катушка с зафиксированным на её оси концом троса, огибающим ролик, размещенный на боковой стенке транспортно-выдающего контейнера, и далее пропущенным в зазоре между корпусом и взрывателем первой в укладке мины, второй конец троса жестко, пайкой, фиксируется на противоположной от ролика стенке транспортно-выдающего контейнера.
2. Устройство для постановки минных заграждений по п. 1, отличающееся тем, что на днище каждого транспортно-выдающего контейнера размещают и жестко, болтовым соединением, закрепляют концевой электромеханический выключатель с подпружиненным роликом, электрической связью соединённый с электронным блоком управления, и спусковой транспортер.
3. Способ постановки минных заграждений, осуществляемый устройством по п. 1, при котором доставку мин в заданный район производят с применением дистанционно-управляемого робототехнического комплекса с гусеничным движителем, при этом осуществляют укладку мин в транспортно-выдающие контейнеры и приводят их в боевое положение, приводят в рабочее положение выдающий механизм, вводят в бортовую систему управления робототехническим комплексом маршрутное задание либо управляют его движением в заданную точку в ручном режиме, осуществляют минирование в заданном районе в соответствии с заданием, после укладки всех мин, находящихся в обоих транспортно-выдающих контейнерах, робототехнический комплекс в автоматическом режиме или в режиме ручного управления возвращают в тыловой район для пополнения запаса мин.
| https://topwar.ru/201057-samohodnaja-mina-gnome-kamikaze-ukrainskaja-realizacija-neudachnoj-koncepcii.html (https://web.archive.org/web/20220831235247/https://topwar.ru/201057-samohodnaja-mina-gnome-kamikaze-ukrainskaja-realizacija-neudachnoj-koncepcii.html) | |||
| Мобильный робототехнический комплекс | 2015 |
|
RU2612115C1 |
| УНИВЕРСАЛЬНЫЙ МИННЫЙ ЗАГРАДИТЕЛЬ | 2000 |
|
RU2185590C2 |
| НОВЫЕ ГЕТЕРОЦИКЛИЧЕСКИЕ СОЕДИНЕНИЯ И ИХ ПРИМЕНЕНИЕ В МЕДИЦИНЕ И КОСМЕТИКЕ | 2015 |
|
RU2712971C2 |
| FR | |||

