Изобретение относится к области парашютных систем, содержащее устройство, крепящееся между парашютом и грузом.
Существует проблемы, связанные с спуском груза: неуправляемый груз при спуске с парашютом подвержен воздействию порывов ветра, повреждению при посадке.
Недостатком известных способов является точность посадки, неконтролируемый радиус зоны посадки, скорость снижения груза у земли.
При спуске груза неуправляемым способом воздушный поток предопределяет точность посадки, которая может повлиять на целесообразность спуска.
На заключительном этапе спуска скорость снижения может оказаться выше ожидаемой из-за воздействия на груз турбулентных потоков воздушных масс.
Известен аналог, устройство для дистанционного управления планирующим парашютом (патент RU №2 094 325 С1, 1997 г.), который содержит радиопередатчик, находящийся на земле у оператора, а двухканальный радиоприемник с блоком питания размещен в корпусе спускаемого аппарата и электрически соединен с двумя миниатюрными исполнительными механизмами, закрепленными непосредственно на парашюте. Каждый из исполнительных механизмов содержит электродвигатель с редуктором и два обрезиненных ролика с полукруглыми канавками. Вокруг роликов сделано по витку стропы управления, свободный конец которой выведен из корпуса и свисает под натяжением концевого грузика.
Известное устройство для дистанционного управления планирующим парашютом не приспособлено для расширения радиуса зоны посадки груза без дополнительных приспособлений.
Известен аналог, планирующий парашют (патент RU №2 094 324 С1, 1997 г.), который содержит в планирующем парашюте фалы, связывающие его с грузом, соединены двумя параллельными гибкими поперечными элементами с закрепленными на них блоками и дополнительным полотнищем с кольцами, через которые проходят направляющие шнуры, концы которых закреплены на гибких поперечных элементах. Кромка дополнительного полотнища скреплена с концами управляющих шнуров ввода и уборки, намотанных на барабан привода и проходящих через блоки. При вращении барабана привода меняется эффективная площадь дополнительного полотнища и аэродинамическое качество планирующей системы, что расширяет диапазон возможных углов планирования.
Известный планирующий парашют описывает систему как единое целое, которая состоит из множества элементов, таких как парашют и блок управления и не предусматривает применение блока управления без разработанного парашюта.
Известен аналог, летающая амфибия-трансформирующееся транспортное средство (патент RU №190200 U1, 2019 г.), в котором летающая амфибия-трансформирующееся транспортное средство может передвигаться по земле, по воде, снегу, льду, болоту и другим средам, позволяющим осуществлять донное скольжение, а также летать. В качестве источника подъёмной силы на нем установлены: мягкое или надувное крыло (вид параплана и/или аэрошюта) и силовой установки. Передвижение по земле на колесах осуществляться электроприводом или от обычного двигателя внутреннего сгорания. Передвижение в других средах - путем создания тяги от винта или других аэродинамических и реактивных элементов конструкции и силовых установок. Винт может быть ограничен кольцом-стабилизатором. Транспортное средство содержит раму с посадочным местом для одного пилота в корпусе аэродинамической обтекаемой формы с остеклением, в передней части силовой рамы смонтирована стойка с управляемым по повороту колесами, а в задней части смонтированы разнесенные по бокам указанной рамы задние колеса, силовую установку, размещенную в задней части рамы и включающую в себя двигатель и толкающий воздушный винт внутри аэродинамического кольца, а также размещенный в верхней части силовой рамы узел крепления концов строповой системы купола мягкого крыла. Днище рамы выполнено в виде гидродинамической поверхности, профиль аэродинамического кольца выполнен крыловой формы, по крайней мере задние колеса выполнены с отдельным приводом их вращения, передние и задние колеса выполнены с приводом их подъема на уровень выше уровня днища рамы, узла размещения выстреливающейся спасательной парашютной системы.
Известная летающая амфибия-трансформирующееся транспортное средство не приспособлена для автономного неуправляемого полета и спуск груза.
Существующие проблемы решаются с помощью предложенной конструкции автоматизированной прецизионной автономной системы доставки груза по воздуху.
Преимуществом предлагаемого способа является увеличение точности посадки груза за счет автоматизированного автономного устройства, рассчитывающего необходимые параметры при снижении.
Преимуществом предлагаемого способа является увеличение радиуса посадки груза, при необходимости, за счет тяги, создаваемой электродвигателем и винтом. Электродвигатель и винт являются отсоединяемыми компонентами автоматизированной прецизионной парашютной системы.
Преимуществом предлагаемого способа является возможность контролировать скорость снижения груза у земли путем изменения длины строп крепления парашюта и тяги винта.
Недостатком предлагаемого способа является трудоемкость создания программного обеспечения для устройства по увеличению точности посадки. Программное обеспечение должно быть реализовано с использованием алгоритмов оптимизации, которые не требуют высокой нагрузки на устройство с ЭВМ с целью низкого энергопотребления.
Спецификация автоматизированной прецизионной система доставки груза:
1. парашют
2. устройство;
3. груз
4. крепление парашюта;
5. защита винта;
6. система подвески груза (верхняя);
7. соединительное звено;
8. система подвески груза (нижняя);
9. винт;
10. корпус устройства;
11. дверка механизма крепления парашюта к системе
12. петли дверки;
13. проем для крепления парашюта;
14. механизм управления;
15. запорный механизм дверки;
16. аккумулятор;
17. запорный механизм аккумулятора;
18. крепление системы подвески груза;
19. сенсорный экран ввода;
20. сервисный разъем;
21. отсоединяемый двигатель.
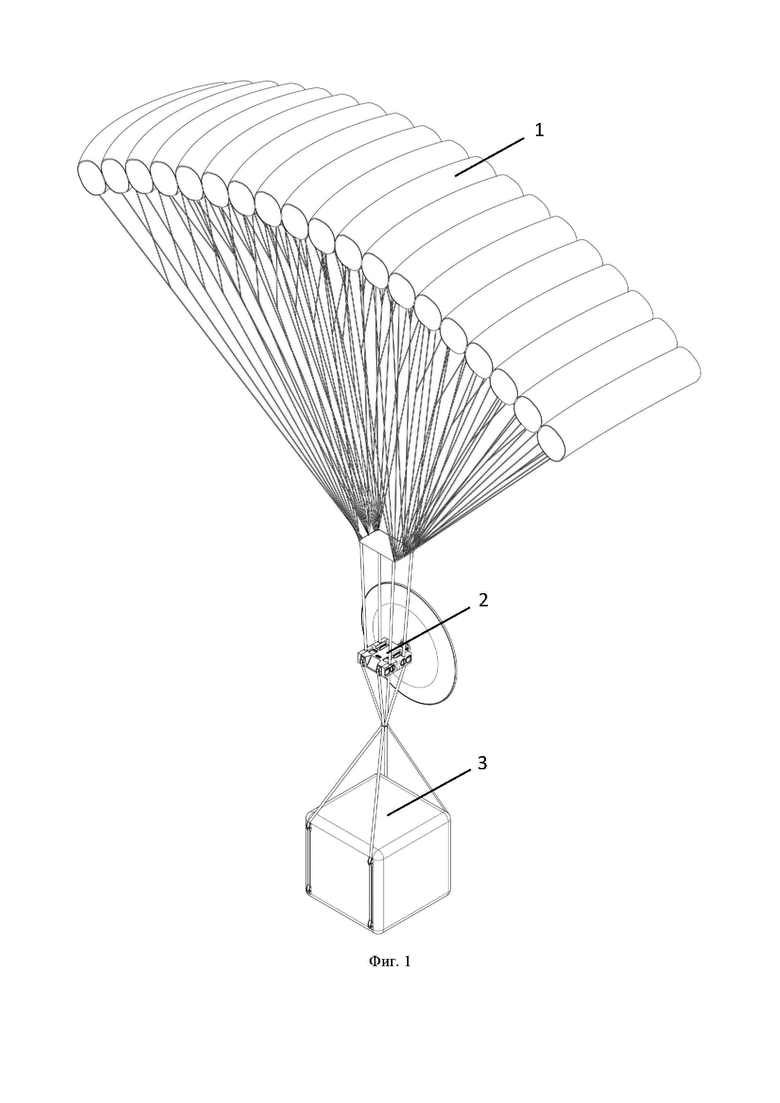
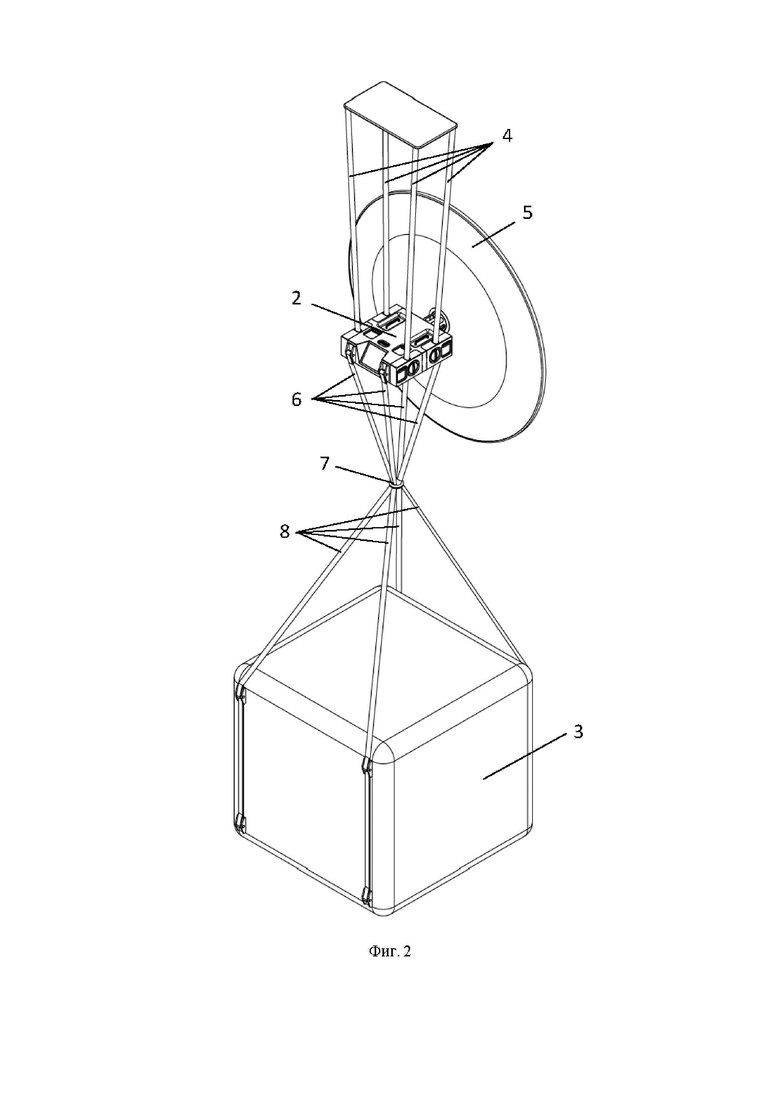
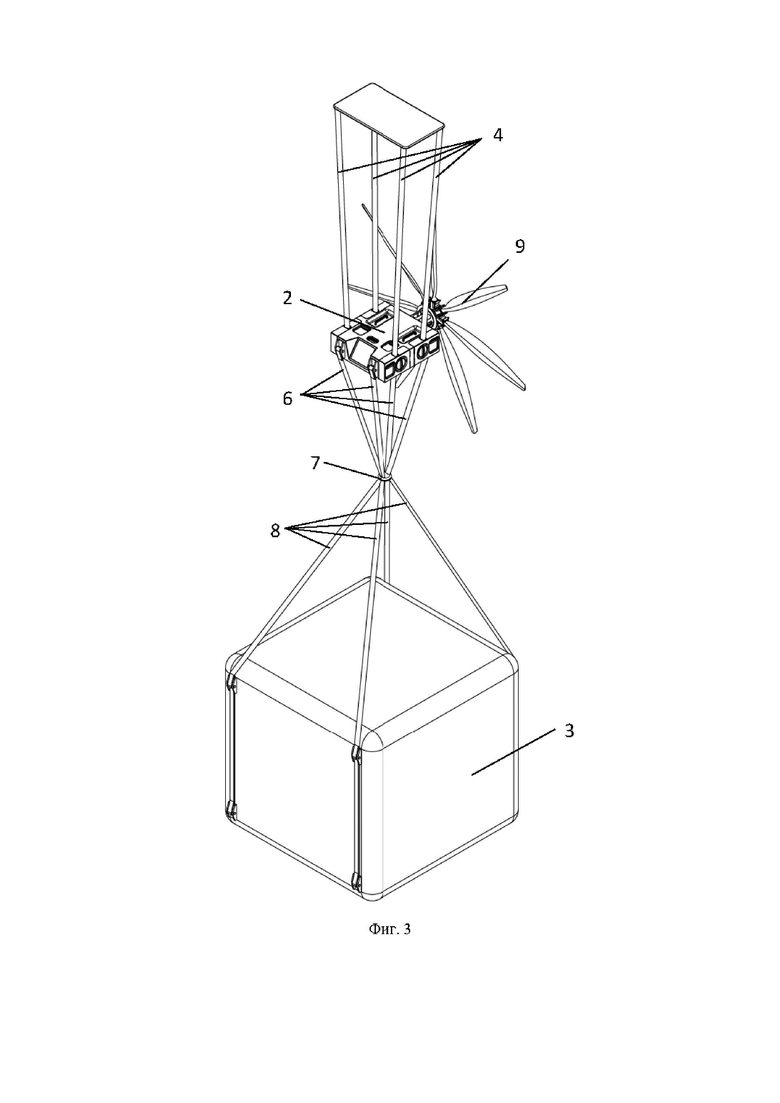
Устройство 2 присоединяется к парашюту 1 с помощью креплений парашюта 4 к устройству 2. Груз 3 присоединяется к устройству 2 с помощью системы подвески груза (верхняя) 6 и системы подвески груза (нижняя) 8, которые имеют соединительное звено 7. Съемный винт 9 имеет защиту винта 5.
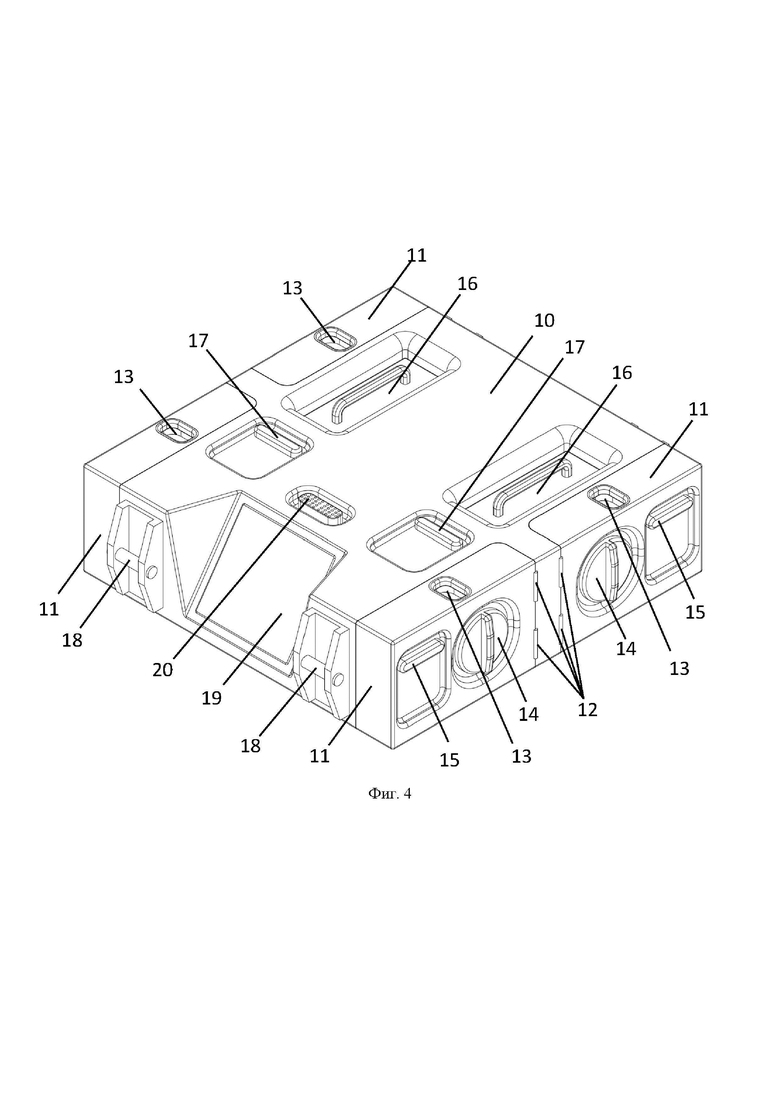
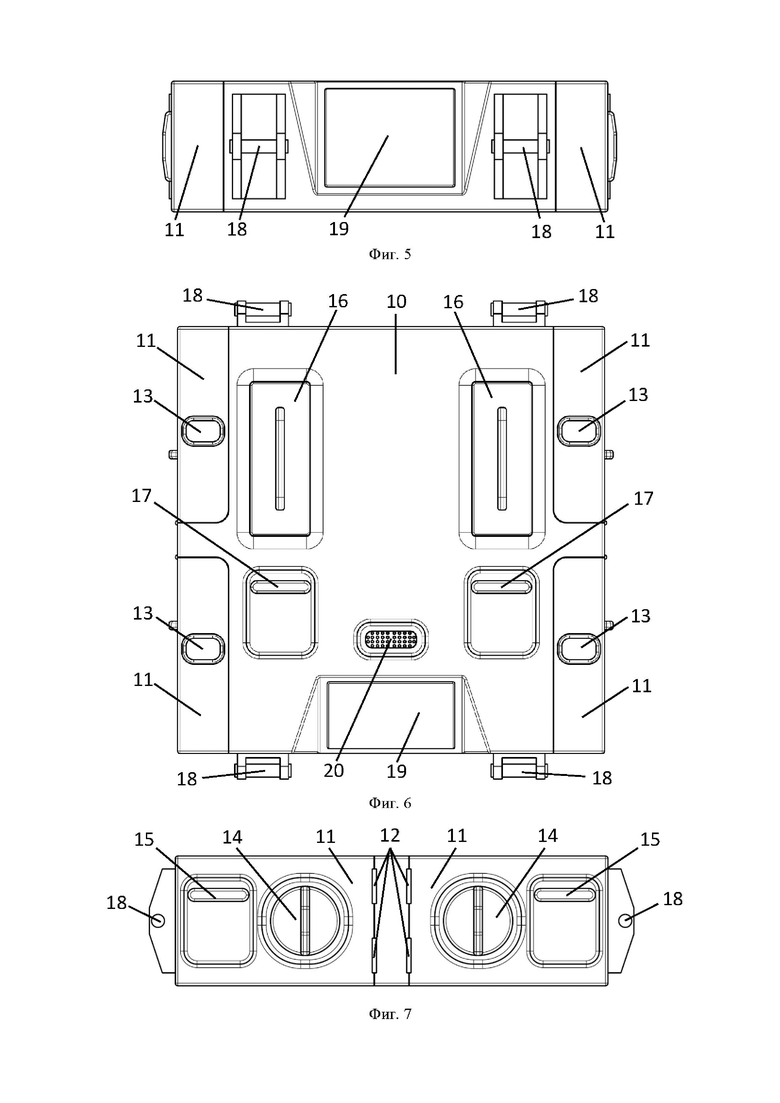
Устройство 2 включает в себя корпус устройства 10, взаимозаменяемые съемные дверки механизма крепления парашюта 4 к системе 11, которые являются открывающимися и включают петли дверки 12, имеющие проем под крепление парашюта 13. На дверке механизма крепления парашюта к системе 11 расположены механизм управления 14 и запорный механизм дверки 15.
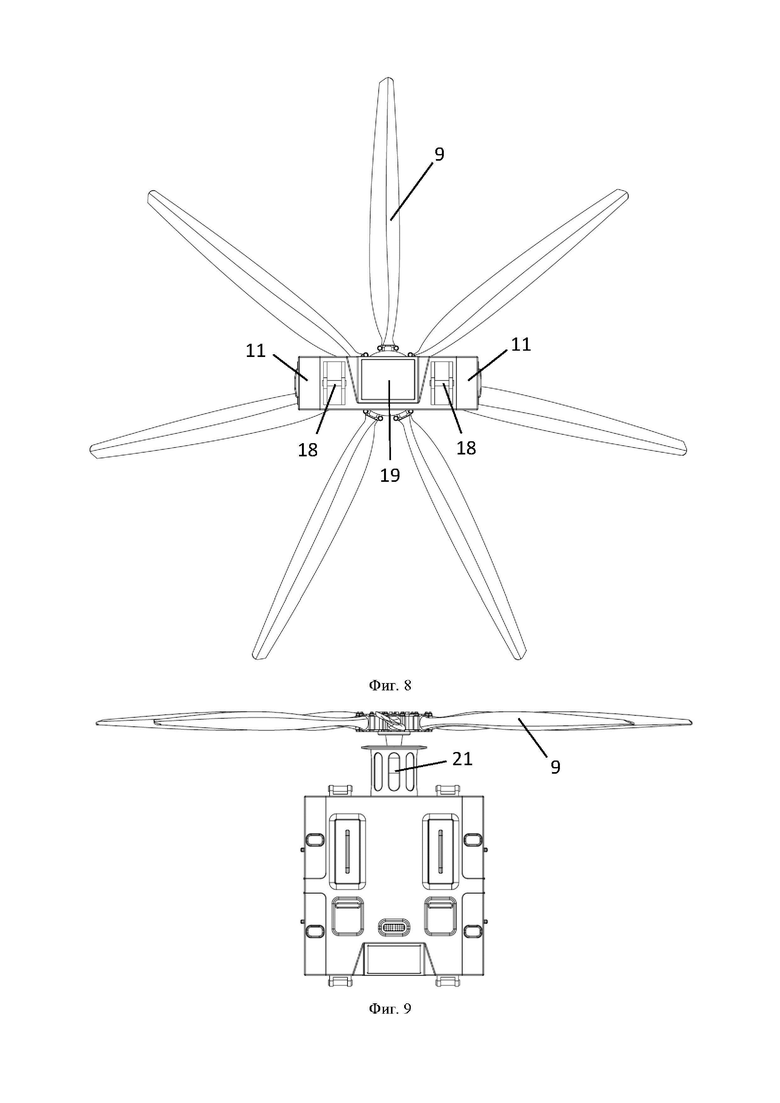
В корпусе устройства 10 расположены аккумуляторы 16, имеющие запорный механизм аккумулятора 17. На корпусе устройства 10 расположены крепления системы подвески груза 18, сенсорный экран ввода 19, сервисный разъем 20 и отсоединяемый двигатель 21.
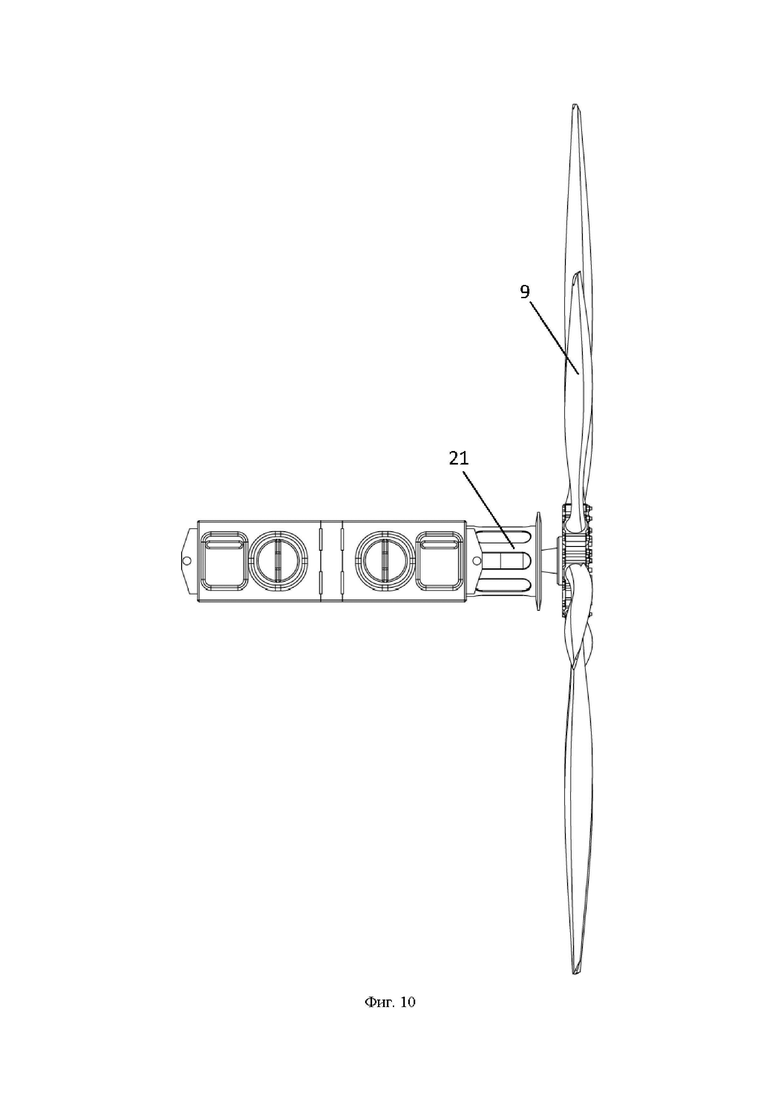
Отсоединяемый двигатель 21 и винт 9 с защитой винта 5, расположенные на задней стороне корпуса устройства 10, выполнены съемными.
Автоматизированная прецизионная система доставки груза представлена на фигурах:
на фиг. 1 - общий вид автоматизированной прецизионной автономной системы доставки груза по воздуху;
на фиг. 2. – укрупненный вид автоматизированной прецизионной автономной системы доставки груза по воздуху с приведенной защитой винта;
на фиг. 3 - укрупненный вид автоматизированной прецизионной автономной системы доставки груза по воздуху без приведенной защиты винта;
на фиг. 4 - схема устройства автоматизированной прецизионной автономной системы доставки груза по воздуху без электродвигателя, винта и защиты винта;
на фиг. 5 – схема (вид спереди) устройства автоматизированной прецизионной автономной системы доставки груза по воздуху без электродвигателя, винта и защиты винта;
на фиг. 6 - схема (вид сверху) устройства автоматизированной прецизионной автономной системы доставки груза по воздуху без электродвигателя, винта и защиты винта;
на фиг. 7 - схема (вид сбоку) устройства автоматизированной прецизионной автономной системы доставки груза по воздуху без электродвигателя, винта и защиты винта;
на фиг. 8 - схема (вид спереди) устройства автоматизированной прецизионной автономной системы доставки груза по воздуху с электродвигателем, винтом;
на фиг. 9 - схема (вид сверху) устройства автоматизированной прецизионной автономной системы доставки груза по воздуху с электродвигателем, винтом;
на фиг. 10 - схема (вид сбоку) устройства автоматизированной прецизионной автономной системы доставки груза по воздуху с электродвигателем, винтом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной отстыковывающийся авиаконтейнер с управляемой парашютной системой | 2021 |
|
RU2758620C1 |
| Система Костенюка быстрой доставки людей и грузов с поля или на поле боя | 2023 |
|
RU2809726C1 |
| Многокупольная крыльевая система | 2020 |
|
RU2770501C2 |
| УПРАВЛЯЕМАЯ ПАРАПЛАННАЯ СИСТЕМА | 2008 |
|
RU2378160C1 |
| ПЛАНИРУЮЩИЙ ПАРАШЮТ | 2023 |
|
RU2805337C1 |
| Мобильная беспилотная система для воздушного наблюдения и разведки | 2022 |
|
RU2793711C1 |
| СПОСОБ АВАРИЙНОЙ ПОСАДКИ КВАДРОКОПТЕРА | 2017 |
|
RU2657659C1 |
| АВТОМАТИЗИРОВАННАЯ ПАРАШЮТНАЯ СИСТЕМА ДОСТАВКИ ГРУЗОВ | 2021 |
|
RU2761675C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ СИСТЕМА ВЕРТОЛЕТА | 1998 |
|
RU2162810C2 |
| ПЛАНИРУЮЩИЙ ПАРАШЮТ | 2007 |
|
RU2339546C2 |
Изобретение относится к области парашютных систем, содержит устройство, крепящееся между парашютом и грузом. Автоматизированная прецизионная автономная система доставки груза по воздуху состоит из парашюта со стропами и системы подвески груза. При этом стропы парашюта и система подвески груза связаны соединительным звеном, содержащим устройство изменения длины строп, электродвигатель с винтом, бортовой компьютер и аккумулятор. При этом система выполнена с возможностью изменения длины строп крепления парашюта, за счет их наматывания/разматывания, и изменения тяги электродвигателя с винтом. Преимуществом предлагаемого способа является увеличение радиуса посадки груза, при необходимости, за счет тяги, создаваемой электродвигателем и винтом, а также возможность контролировать скорость снижения груза у земли путем изменения длины строп крепления парашюта и тяги винта. 1 з.п. ф-лы, 10 ил.
1. Автоматизированная прецизионная автономная система доставки груза по воздуху, отличающаяся тем, что состоит из парашюта со стропами и системы подвески груза, при этом стропы парашюта и система подвески груза связаны соединительным звеном, содержащим устройство изменения длины строп, электродвигатель с винтом, бортовой компьютер и аккумулятор, при этом система выполнена с возможностью изменения длины строп крепления парашюта, за счет их наматывания/разматывания, и изменения тяги электродвигателя с винтом.
2. Автоматизированная прецизионная система по п.1, отличающаяся тем, что электродвигатель и винт выполнены съемными.
| KR 101702573 B1, 06.02.2017 | |||
| US 6587762 B1, 01.07.2003 | |||
| DE 4336056 A1, 27.04.1995 | |||
| CN 108298093 A, 20.07.2018 | |||
| WO 2017095076 A1, 08.06.2017. |

