1. Область техники
[0001] Настоящее изобретение относится к технической области транспортных средств и, в частности, к многодвигательной приводной коробке с гибким крутящим моментом и электрическому транспортному средству.
2. Уровень техники
[0002] Ввиду того, что проблемы энергетического кризиса и загрязнения окружающей среды продолжают усугубляться, страны по всему миру, особенно Китай с его широко развитой сферой автопромышленности, активно выступают за разработку электрических транспортных средств, уделяя этому все больше внимания. Различные компании сосредоточили усилия на разработке электроприводной системы для электрических транспортных средств. Однако в случае эксплуатации транспортных средств с большими нагрузками для них требуется обеспечение высокого выходного крутящего момента и высокой максимальной скорости, поэтому большинство компаний сходятся на мнении, что приводной двигатель, имеющий один высокий крутящий момент и низкую скорость вращения, должен взаимодействовать с редуктором, имеющим фиксированное соотношение скоростей. Это приводит не только к увеличению веса самой электроприводной системы и производственных затрат, но также и к неудовлетворительному КПД транспортного средства на средних или высоких скоростях. Некоторые компании заменяют редуктор на многоступенчатую роботизированную коробку передач (РКП). В этом же случае, несмотря на возможность улучшения КПД транспортного средства на средних или высоких скоростях, все еще могут возникать прерывания мощности, вызываемые частыми переключениями передач, что будет снижать уровень комфорта и дополнительно повышать затраты системы. Кроме того, в случае отказа двигателя нормальная работа транспортного средства становится невозможной.
Суть изобретения
[0003] С учетом указанных выше проблем, представлены многодвигательная приводная коробка с гибким крутящим моментом и электрическое транспортное средство, которые могут решить эти проблемы полностью или по меньшей мере частично.
[0004] Задача настоящего изобретения заключается в представлении многодвигательной приводной коробки с гибким крутящим моментом. В многодвигательной приводной коробке с гибким крутящим моментом предусмотрен приводной двигатель с множеством групп низких крутящих моментов и высокой скоростью вращения. Таким образом, можно не только удовлетворить потребность в высоком крутящем моменте при рабочих условиях низкой скорости и обеспечить КПД транспортного средства на средних или высоких скоростях, но также можно снизить производственные затраты и повысить надежность электроприводной системы.
[0005] Еще одна задача настоящего изобретения заключается в обеспечении максимально возможного уменьшения частоты возникновения прерываний мощности и внезапных пауз во время переключения передач для повышения комфорта езды за счет установки двухступенчатого передаточного устройства в многодвигательной приводной коробке с гибким крутящим моментом.
[0006] В частности, в соответствии с аспектом вариантов осуществления настоящего изобретения представлена многодвигательная приводная коробка с гибким крутящим моментом. Многодвигательная приводная коробка с гибким крутящим моментом содержит:
[0007] по меньшей мере два источника мощности, при этом каждый из указанных по меньшей мере двух источников мощности содержит приводной двигатель для выдачи движущей силы; и
[0008] по меньшей мере два узла редуктора, соединенные с указанными по меньшей мере двумя источниками мощности во взаимно однозначном соответствии, при этом указанные по меньшей мере два узла редуктора выполнены с возможностью передачи движущей силы.
[0009] Кроме того, многодвигательная приводная коробка с гибким крутящим моментом дополнительно содержит дифференциал. Входной конец дифференциала соединен с выходным концом каждого узла редуктора, а выходной конец дифференциала, соответственно, соединен с левым приводным валом и правым приводным валом для передачи движущей силы на цапфу колеса, чтобы приводить в движение колесо транспортного средства.
[0010] Кроме того, многодвигательная приводная коробка с гибким крутящим моментом дополнительно содержит трансмиссию, соединяющую входной конец дифференциала с выходным концом каждого узла редуктора.
[0011] Кроме того, каждый источник мощности содержит приводной двигатель и вал двигателя, соединенный с приводным двигателем;
[0012] каждый узел редуктора содержит первый передаточный механизм, соединенный с валом двигателя, и второй передаточный механизм, входящий в зацепление с первым передаточным механизмом. Второй передаточный механизм представляет собой выходной конец узла редуктора.
[0013] Кроме того, один из вторых передаточных механизмов является общим для указанных по меньшей мере двух узлов редуктора.
[0014] Кроме того, указанные по меньшей мере два источника мощности установлены по периферии второго передаточного механизма.
[0015] Кроме того, трансмиссия содержит узел входного вала, узел промежуточного вала, узел выходного вала и устройство переключения передач,
[0016] узел входного вала содержит входной вал, соединенный со вторым передаточным механизмом, и третий передаточный механизм, соединенный с входным валом,
[0017] узел промежуточного вала содержит промежуточный вал, четвертый передаточный механизм и пятый передаточный механизм, при этом оба конца промежуточного вала соединены, соответственно, с четвертым передаточным механизмом и пятым передаточным механизмом, а четвертый передаточный механизм входит в зацепление с пятым передаточным механизмом,
[0018] узел выходного вала содержит выходной вал и шестой передаточный механизм, при этом выходной вал соединен с входным концом дифференциала, шестой передаточный механизм установлен на выходном валу с возможностью вращения, а также шестой передаточный механизм входит в зацепление с пятым передаточным механизмом, и
[0019] устройство переключения передач установлено на выходном валу и выполнено с возможностью управления соединением между выходным валом и шестым передаточным механизмом или входным валом.
[0020] Кроме того, при работе трансмиссии на первой передаче, устройство переключения передач выполнено с возможностью управления выходным валом для соединения с шестым передаточным механизмом для обеспечения последовательного прохождения движущей силы, передаваемой от узла редуктора, через входной вал, третий передаточный механизм, четвертый передаточный механизм, промежуточный вал, пятый передаточный механизм, шестой передаточный механизм и выходной вал на дифференциал. При работе трансмиссии на второй передаче, устройство переключения передач выполнено с возможностью управления выходным валом для соединения с входным валом для обеспечения последовательного прохождения движущей силы, передаваемой от узла редуктора, через входной вал и выходной вал на дифференциал с обеспечением двухступенчатого управления транспортным средством.
[0021] Кроме того, указанные по меньшей мере два источника мощности выполнены с возможностью работы совместно или по отдельности управляемым образом.
[0022] Кроме того, указанные по меньшей мере два источника мощности установлены одним из следующих способов:
[0023] расположение спереди, расположение сзади и противоположное расположение.
[0024] Кроме того, многодвигательная приводная коробка с гибким крутящим моментом дополнительно содержит по меньшей мере один двухдвигательный контроллер или по меньшей мере один двухдвигательный контроллер и однодвигательный контроллер, при этом количество двухдвигательных контроллеров и однодвигательных контроллеров определяется в соответствии с количеством приводных двигателей.
[0025] В аспекте вариантов осуществления настоящего изобретения представлено электрическое транспортное средство.
[0026] В другом аспекте вариантов осуществления настоящего изобретения также представлено электрическое транспортное средство, содержащее многодвигательную приводную коробку с гибким крутящим моментом, описанную в любом из предыдущих параграфов.
[0027] Кроме того, электрическое транспортное средство включает в себя полностью электрический тяжелый грузовой автомобиль, тяжелый грузовой автомобиль с повышенной дальностью хода и тяжелый грузовой автомобиль с заменяемым аккумулятором.
[0028] Кроме того, тяжелый грузовой автомобиль с заменяемым аккумулятором содержит заменяемый аккумуляторный блок, при этом заменяемый аккумуляторный блок быстро заменяется посредством станции замены аккумулятора.
[0029] В вариантах осуществления настоящего изобретения представлена многодвигательная приводная коробка с гибким крутящим моментом. Многодвигательная приводная коробка с гибким крутящим моментом содержит по меньшей мере два источника мощности, при этом каждый из указанных по меньшей мере двух источников мощности содержит приводной двигатель. Движущая сила, выдаваемая источником мощности, передается узлом редуктора на дифференциал. Таким образом, движущая сила передается на мост транспортного средства через дифференциал для приведения колес в движение. Приводной двигатель с множеством групп низких крутящих моментов и высокой скоростью вращения используется для замены имеющегося приводного двигателя с одним высоким крутящим моментом и низкой скоростью вращения. Таким образом, можно не только удовлетворить потребность в высоком крутящем моменте при рабочих условиях низкой скорости и обеспечить КПД транспортного средства на средних или высоких скоростях, но также можно снизить затраты на производство и закупки. Кроме того, в случае отказа одного приводного двигателя, транспортным средством все еще можно нормально управлять с помощью других приводных двигателей, что повышает надежность электроприводной системы.
[0030] Также, многодвигательная приводная коробка с гибким крутящим моментом в настоящем изобретении снабжена двухступенчатым устройством переключения передач, что может максимально возможно уменьшить прерывания мощности и внезапные паузы во время переключения передач для повышения комфорта вождения. Кроме того, по сравнению с существующей многоступенчатой РКП, многодвигательная приводная коробка с гибким крутящим моментом в данном варианте осуществления может снизить затраты.
[0031] Кроме того, указанные по меньшей мере два источника мощности выполнены с возможностью работы совместно или по отдельности в зависимости от условий работы транспортного средства. Таким образом, можно достичь не только удовлетворения КПД транспортного средства и работы приводного двигателя в зоне высокой эффективности, но также снижения потерь мощности приводного двигателя и повышения эффективности электроприводной системы. Кроме того, каждый приводной двигатель выполнен с возможностью работы в разные периоды времени, что распределяет накопленный износ приводных двигателей между каждым приводным двигателем, тем самым снижая вероятность отказа приводного двигателя.
[0032] Также, благодаря комбинированию и использованию соответствующего количества двухдвигательных контроллеров и однодвигательных контроллеров в соответствии с количеством приводных двигателей, производственные затраты на контроллер двигателя могут быть снижены.
[0033] Приведенное выше описание представляет собой лишь обзор технических решений настоящего изобретения. Для того, чтобы лучше понять технические решения настоящего изобретения, они могут быть реализованы в соответствии с представленными в описании сведениями, и для обеспечения лучшей ясности и понимания приведенных выше и других задач, признаков и преимуществ настоящего изобретения, ниже будут описаны конкретные варианты осуществления настоящего изобретения.
[0034] Приведенные выше и другие задачи, признаки и преимущества настоящего изобретения станут более ясны специалисту в данной области техники после ознакомления с приведенным далее подробным описанием вариантов осуществления настоящего изобретения со ссылкой на сопроводительные чертежи.
Описание прилагаемых чертежей
[0035] Некоторые варианты осуществления настоящего изобретения будут ясно описаны со ссылкой на сопроводительные чертежи, представленные в качестве иллюстрации, а не ограничения. Одинаковыми ссылочными позициями на чертежах обозначены одинаковые или подобные компоненты или детали. Специалист в данной области техники поймет, что чертежи не обязательно выполнены в масштабе.
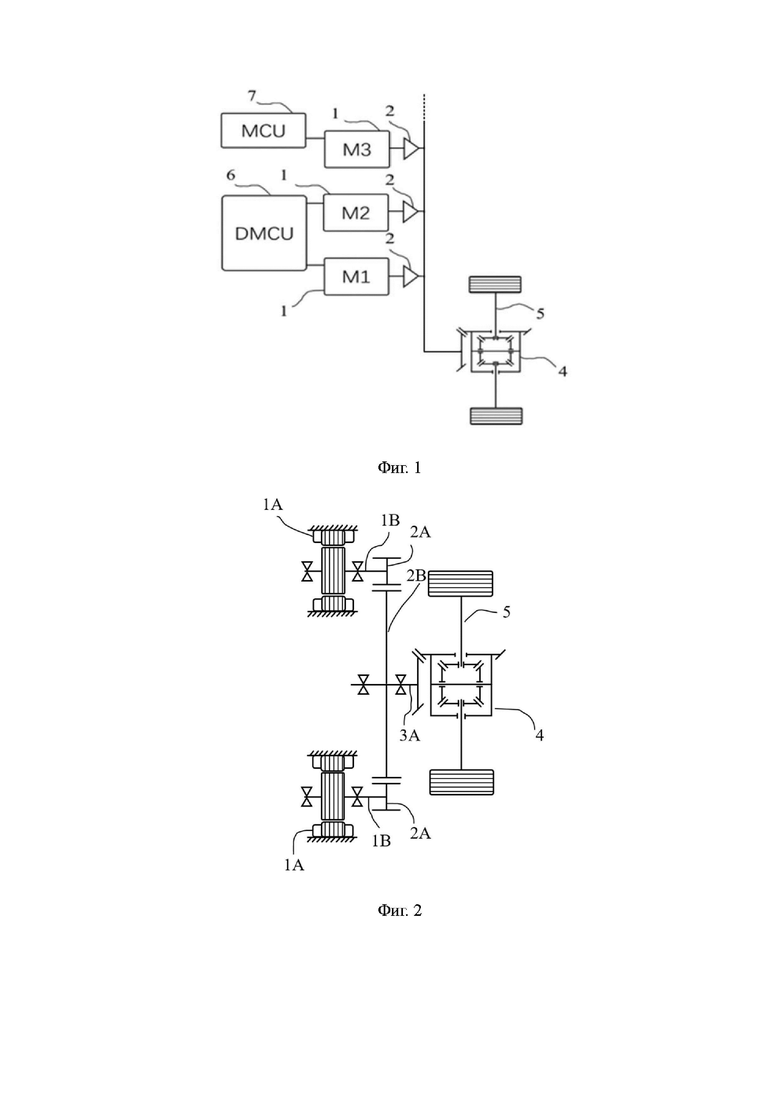
[0036] На фиг. 1 изображен схематический структурный блочный вид многодвигательной приводной коробки с гибким крутящим моментом в соответствии с первым вариантом осуществления настоящего изобретения.
[0037] На фиг. 2 изображен схематический структурный вид многодвигательной приводной коробки с гибким крутящим моментом в соответствии с первым вариантом осуществления настоящего изобретения.
[0038] На фиг. 3 изображен схематический компоновочный вид приводного двигателя в соответствии с первым вариантом осуществления настоящего изобретения.
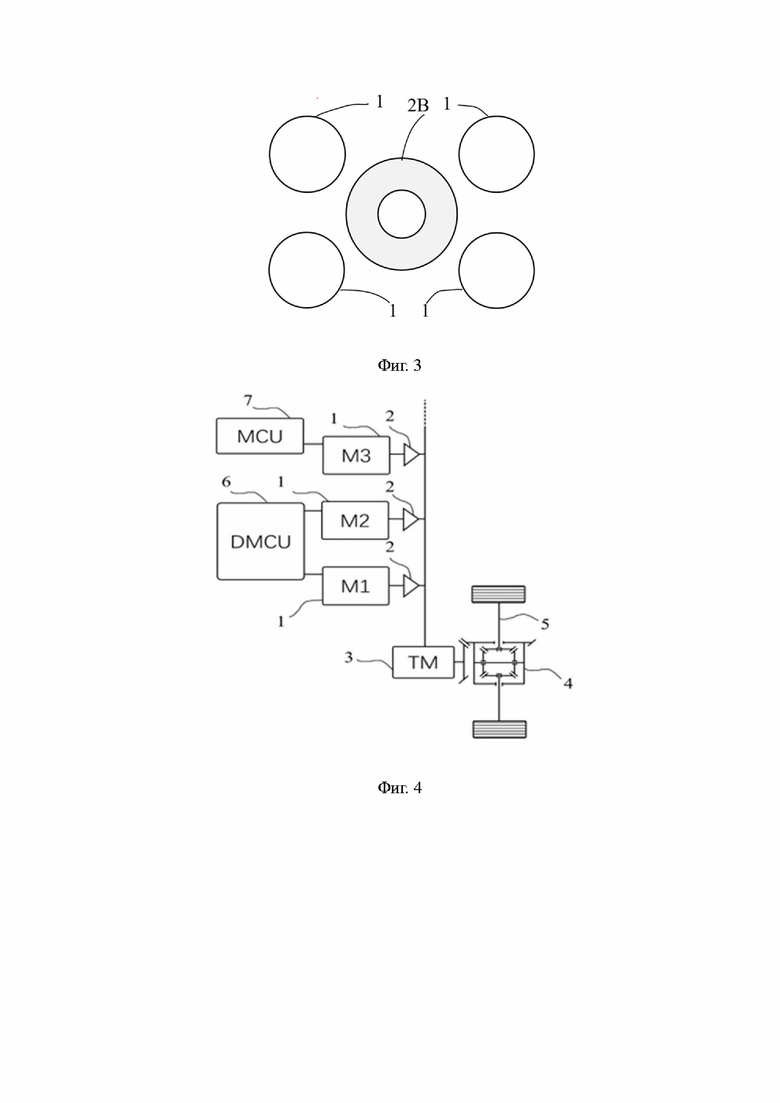
[0039] На фиг. 4 изображен схематический структурный блочный вид многодвигательной приводной коробки с гибким крутящим моментом в соответствии со вторым вариантом осуществления настоящего изобретения.
[0040] На фиг. 5 изображен схематический структурный вид многодвигательной приводной коробки с гибким крутящим моментом в соответствии со вторым вариантом осуществления настоящего изобретения.
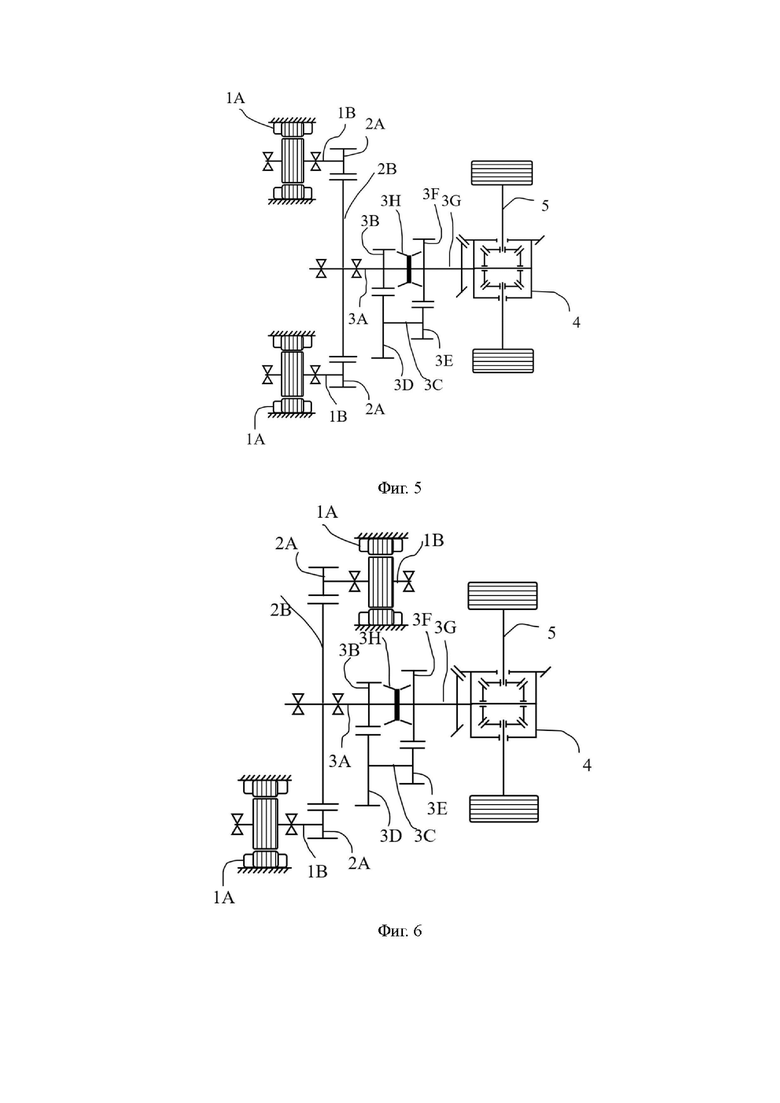
[0041] На фиг. 6 изображен схематический структурный вид многодвигательной приводной коробки с гибким крутящим моментом в соответствии с третьим вариантом осуществления настоящего изобретения;
[0042] На фиг. 7 изображен схематический структурный вид многодвигательной приводной коробки с гибким крутящим моментом в соответствии с четвертым вариантом осуществления настоящего изобретения.
Конкретные варианты осуществления
[0043] Далее будут ясно описаны иллюстративные варианты осуществления настоящего изобретения со ссылкой на сопроводительные чертежи. Несмотря на то, что на чертежах изображены примеры вариантов осуществления настоящего изобретения, следует понимать, что настоящее изобретение может быть реализовано в различных формах и не ограничивается вариантами осуществления, описанными в настоящем документе. Вместо этого, данные варианты осуществления представлены для обеспечения специалисту в данной области техники более глубокого понимания настоящего изобретения и для полной передачи объема заявленного изобретения.
[0044] В настоящее время двигатель транспортных средств с большими нагрузками, который имеет низкую скорость вращения, высокую мощность и высокий крутящий момент, должен взаимодействовать с многоступенчатой роботизированной коробкой передач (РКП), что увеличивает затраты на электроприводную систему. В большинстве условий работы скорость вращения двигателя транспортного средства является высокой, и транспортное средство не может находиться в зоне высокой эффективности постоянно или в большинстве случаев, что снижает эффективность электроприводной системы. В многоступенчатой (например, 6-ступенчатой, 8-ступенчатой и 9-ступенчатой) РКП имеет место не только сложность логики управления и предрасположенность мощности переключения передач к прерыванию, но также управление двигателем и трансмиссией разными контроллерами, а также низкая интеграция компонентов. Кроме того, поскольку для езды используется один двигатель, если происходит его отказ, то транспортное средство не может продолжать движение, что делает надежность электроприводной системы низкой.
[0045] Для того, чтобы полностью или по меньшей мере частично решить указанные выше технические проблемы, в варианте осуществления настоящего изобретения представлена многодвигательная приводная коробки с гибким крутящим моментом. Технические решения в вариантах осуществления настоящего изобретения далее будут ясно и полно описаны со ссылкой на сопроводительные чертежи, на которых изображены варианты осуществления с первого по четвертый включительно.
[0046] Первый вариант осуществления
[0047] Как показано на фиг. 1 - фиг. 3, многодвигательная приводная коробка с гибким крутящим моментом в данном варианте осуществления может содержать по меньшей мере источник 1 мощности и узел 2 редуктора. Кроме того, многодвигательная приводная коробка с гибким крутящим моментом может дополнительно содержать дифференциал 4.
[0048] Предусмотрено по меньшей мере два источника 1 мощности, при этом каждый источник 1 мощности содержит приводной двигатель 1A для выдачи движущей силы. КПД и геометрические размеры являются одинаковыми у каждого приводного двигателя 1A, что упрощает управление приводным двигателем 1A. Следует отметить, что количество источников 1 мощности, изображенных на фиг. 1 - фиг. 3, является лишь схематическим, и оно может быть задано в зависимости от фактических эксплуатационных требований транспортного средства. Например, может быть предусмотрено два, три или даже больше источников 1 мощности. В конкретном варианте осуществления может быть предусмотрено четыре источника 1 мощности. Количество узлов 2 редуктора может равняться количеству источников 1 мощности, при этом узел 2 редуктора соединен с источником 1 мощности во взаимно однозначном соответствии для передачи движущей силы. То есть каждый источник 1 мощности соединен с узлом 2 редуктора соответственно. Входной конец дифференциала 4 соединен с выходным концом каждого узла 2 редуктора, а выходной конец дифференциала 4 соединен с мостом 5 транспортного средства для передачи движущей силы на мост 5 транспортного средства и приведения колес транспортного средства в движение. Мост 5 транспортного средства может содержать левую полуось и правую полуось. Левая полуось и правая полуось, используемые в качестве приводных валов, соответственно, соединены с колесами. Приводной двигатель 1A с множеством групп низких крутящих моментов и высокой скоростью вращения используется для замены приводного двигателя с одним высоким крутящим моментом и низкой скоростью вращения. Таким образом, можно не только удовлетворить потребность в высоком крутящем моменте при рабочих условиях низкой скорости и обеспечить КПД транспортного средства на средних или высоких скоростях, но также можно снизить затраты на производство и закупки. Кроме того, в случае отказа одного приводного двигателя 1A, транспортным средством все еще можно нормально управлять с помощью других приводных двигателей 1A, что повышает надежность электроприводной системы. Кроме того, в данном варианте осуществления исключена необходимость в установке трансмиссии, что упрощает управление для многодвигательной приводной коробки с гибким крутящим моментом, и это особенно актуально для транспортных средств, требующих эксплуатации на низкой скорости, тем самым достигая максимально возможной экономической эффективности исходя из того, что удовлетворяются требования транспортного средства.
[0049] Как показано на фиг. 2, каждый источник 1 мощности содержит приводной двигатель 1A и вал 1B двигателя, соединенный с приводным двигателем 1A. Каждый узел 2 редуктора содержит первый передаточный механизм 2A, соединенный с валом 1B двигателя, и второй передаточный механизм 2B, входящий в зацепление с первым передаточным механизмом 2A. Второй передаточный механизм 2B представляет собой выходной конец узла 2 редуктора. Приводной двигатель 1A соединен с первым передаточным механизмом 2A через вал 1B двигателя, а затем приводной двигатель 1A соединен с дифференциалом 4 через второй передаточный механизм 2B. Движущая сила, выдаваемая приводным двигателем 1A, передается на дифференциал 4 за счет зацепления первого передаточного механизма 2A со вторым передаточным механизмом 2B.
[0050] Один из вторых передаточных механизмов 2B может быть общим для указанных по меньшей мере двух узлов 2 редуктора. То есть каждый узел 2 редуктора содержит первый передаточный механизм 2A и общий второй передаточный механизм 2B. Таким образом, может быть снижено количество компонентов и объем многодвигательной приводной коробки с гибким крутящим моментом, тем самым экономя полезное пространство многодвигательной приводной коробки с гибким крутящим моментом.
[0051] Кроме того, если для двух узлов 2 редуктора предусмотрен один общий второй передаточный механизм 2B, то указанные по меньшей мере два источника 1 мощности могут быть установлены по периферии второго передаточного механизма 2B. Как показано на фиг. 3, по периферии установлено несколько источников 1 мощности, при этом второй передаточный механизм 2B выступает в роли центра оси. Таким образом, конструкция многодвигательной приводной коробки с гибким крутящим моментом становится более компактной, а также может быть дополнительно сэкономлено полезное пространство многодвигательной приводной коробки с гибким крутящим моментом.
[0052] Указанные по меньшей мере два источника 1 мощности выполнены с возможностью работы совместно или по отдельности в зависимости от условий работы транспортного средства. Таким образом, можно достичь не только удовлетворения КПД транспортного средства и работы приводного двигателя 1A в зоне высокой эффективности, но также снижения потерь мощности приводного двигателя 1A и повышения эффективности электроприводной системы. Кроме того, каждый приводной двигатель 1A выполнен с возможностью работы в разные периоды времени, что распределяет накопленный износ приводных двигателей 1A между каждым приводным двигателем 1A, тем самым снижая вероятность отказа приводного двигателя 1A.
[0053] Указанные по меньшей мере два источника 1 мощности установлены с расположением спереди. Под расположением спереди следует понимать, что все приводные двигатели 1A установлены перед узлом 2 редуктора. Расположение спереди может упростить конструкции источника 1 мощности и узла 2 редуктора, а также может упростить сборку источника 1 мощности и узла 2 редуктора. Источники 1 мощности могут быть установлены другими способами, например, расположены сзади, расположены противоположно и подобным образом.
[0054] Кроме того, как показано на фиг. 1, многодвигательная приводная коробка с гибким крутящим моментом может содержать по меньшей мере один двухдвигательный контроллер 6 (обозначенный как DMCU на фиг. 1) или по меньшей мере один двухдвигательный контроллер 6 и однодвигательный контроллер 7 (обозначенный как MCU на фиг. 1). Количество двухдвигательных контроллеров 6 и однодвигательных контроллеров 7 определяется в соответствии с количеством приводных двигателей 1A. Двухдвигательный контроллер 6 может управлять, соответственно, двумя двигателями с помощью стратегий. На практике, двухдвигательные контроллеры 6 следует использовать в максимально возможной степени. Например, если предусмотрено четное количество приводных двигателей 1A, то могут использоваться все двухдвигательные контроллеры 6, при этом двухдвигательных контроллеров 6 предусмотрено вдвое меньше, чем приводных двигателей 1A. Если предусмотрено нечетное количество приводных двигателей 1A, то может использоваться однодвигательный контроллер 7 в дополнение к двухдвигательному контроллеру 6. Благодаря комбинированию и использованию соответствующего количества двухдвигательных контроллеров 6 и однодвигательных контроллеров 7 в соответствии с количеством приводных двигателей 1A, производственные затраты на контроллер двигателя могут быть снижены.
[0055] Второй вариант осуществления
[0056] Как показано на фиг. 4 и фиг. 5, отличие между вторым вариантом осуществления и первым вариантом осуществления заключается в том, что многодвигательная приводная коробка с гибким крутящим моментом дополнительно содержит трансмиссию 3, соединяющую входной конец дифференциала 4 с выходным концом каждого узла 2 редуктора. В этом случае выходной конец (а именно - второй передаточный механизм 2B) каждого узла 2 редуктора соединен с трансмиссией 3, а также с входным концом дифференциала 4 через трансмиссию 3.
[0057] В этом варианте осуществления приводной двигатель 1A, узел 2 редуктора и трансмиссия 3 встроены во внутренний корпус трансмиссии 3 в роли держателя, тем самым улучшая интеграцию компонентов и делая конструкцию многодвигательной приводной коробки с гибким крутящим моментом более компактной.
[0058] Трансмиссия 3 содержит узел входного вала, узел промежуточного вала, узел выходного вала и устройство 3H переключения передач. Узел входного вала содержит входной вал 3A, соединенный со вторым передаточным механизмом 2B, и третий передаточный механизм 3B, соединенный с входным валом 3A. Входной вал 3A и третий передаточный механизм 3B могут быть выполнены за единое целое или соединены друг с другом с помощью реек. Узел промежуточного вала содержит промежуточный вал 3C, четвертый передаточный механизм 3D и пятый передаточный механизм 3E. Оба конца промежуточного вала 3C соединены, соответственно, с четвертым передаточным механизмом 3D и пятым передаточным механизмом 3E, а четвертый передаточный механизм 3D входит в зацепление с третьим передаточным механизмом 3B. Четвертый передаточный механизм 3D соединен с промежуточным валом 3C с помощью реек, посадки с натяжением и прессовой посадки. Пятый передаточный механизм 3E соединен с промежуточным валом 3C с помощью реек, посадки с натяжением и прессовой посадки. Узел выходного вала содержит выходной вал 3G и шестой передаточный механизм 3F. Выходной вал 3G соединен с входным концом дифференциала 4, а шестой передаточный механизм 3F установлен на выходном валу 3G с возможностью вращения. Шестой передаточный механизм 3F входит в зацепление с пятым передаточным механизмом 3E. Шестой передаточный механизм 3F установлен на выходном валу 3G посредством игольчатого подшипника и может вращаться по периферии выходного вала 3G. Устройство 3H переключения передач установлено на выходном валу 3G и выполнено с возможностью управления соединением между выходным валом 3G и шестым передаточным механизмом 3F или входным валом 3A. Устройство 3H переключения передач может быть установлено на выходном валу 3G посредством реек или посадки с натяжением. Устройство 3H переключения передач может содержать составную зубчатую втулку или муфту.
[0059] Исходя из описанной выше конструкции, в трансмиссии 3 может быть реализовано две передачи, а именно - первая передача и вторая передача. При работе трансмиссии 3 на первой передаче, устройство 3H переключения передач выполнено с возможностью обеспечения соединения выходного вала 3G с шестым передаточным механизмом 3F для обеспечения последовательного прохождения движущей силы, передаваемой от узла 2 редуктора, через входной вал 3A, третий передаточный механизм 3B, четвертый передаточный механизм 3D, промежуточный вал 3C, пятый передаточный механизм 3E, шестой передаточный механизм 3F и выходной вал 3G на дифференциал 4. При работе трансмиссии 3 на второй передаче, устройство 3H переключения передач выполнено с возможностью обеспечения соединения выходного вала 3G с входным валом 3A для обеспечения последовательного прохождения движущей силы, передаваемой от узла 2 редуктора, через входной вал 3A и выходной вал 3G на дифференциал 4 с обеспечением двухступенчатого управления транспортным средством.
[0060] В данном варианте осуществления многодвигательная приводная коробка с гибким крутящим моментом снабжена двухступенчатым устройством переключения передач, что может максимально возможно уменьшать прерывания мощности и внезапные паузы во время переключения передач для повышения комфорта вождения. Кроме того, по сравнению с существующей многоступенчатой РКП, многодвигательная приводная коробка с гибким крутящим моментом в данном варианте осуществления может снизить затраты.
[0061] Далее будут подробно описаны режимы работы многодвигательной приводной коробки с гибким крутящим моментом в случае обеспечения четырех источников 1 мощности и двухступенчатой трансмиссии 3.
[0062] Во время фактического движения транспортного средства будет предусмотрено восемь различных режимов работы с приводом от электричества, если для работы четыре источника 1 мощности взаимодействуют с двухступенчатой трансмиссией 3. Взаимосвязь между каждым рабочим режимом, ступенью передачи трансмиссии 3 и источником 1 мощности показана в таблице ниже.
[0063] Если работает только один приводной двигатель 1A, а трансмиссия 3 находится в положении первой передачи, то этот режим работы определяется, как первый режим EV1 передачи, приводимый электричеством. Режим EV1 работы подходит для работы, например, в условиях отсутствия нагрузки, ровных дорог, спусков с незначительным наклоном или равномерной езды на низкой скорости. В этом режиме работы потребление мощности может быть уменьшено. Кроме того, поскольку транспортное средство приводится в движение одним приводным двигателем, а другие двигатели не работают, то механическая усталость и износ могут быть снижены.
[0064] Если работает только один приводной двигатель 1A, а трансмиссия 3 находится в положении второй передачи, то этот режим работы определяется, как второй режим EV2 передачи, приводимый электричеством. Режим EV2 работы подходит для работы в условиях отсутствия нагрузки, ровных дорог или равномерной езды на высокой скорости.
[0065] Если работают два приводных двигателя 1A, а трансмиссия 3 находится в положении первой передачи, то этот режим работы определяется, как третий режим EV3 передачи, приводимый электричеством. Режим EV3 работы подходит для работы в условиях отсутствия нагрузки, запуска на ровных дорогах или езды с малой нагрузкой и на низкой скорости.
[0066] Если работают два приводных двигателя 1A, а трансмиссия 3 находится в положении второй передачи, то этот режим работы определяется, как четвертый режим EV4 передачи, приводимый электричеством. Режим EV3 работы подходит для работы в условиях отсутствия или малой нагрузки, ровных дорог или равномерной езды на высокой скорости.
[0067] Если работают три приводных двигателя 1A, а трансмиссия 3 находится в положении первой передачи, то этот режим работы определяется, как пятый режим EV5 передачи, приводимый электричеством. Режим EV5 работы подходит для работы в условиях умеренной или стандартной нагрузки, запуска, ровных дорог или езды на низкой скорости.
[0068] Если работают три приводных двигателя 1A, а трансмиссия 3 находится в положении второй передачи, то этот режим работы определяется, как шестой режим EV6 передачи, приводимый электричеством. Режим EV6 работы подходит для работы в условиях умеренной или стандартной нагрузки, ровных дорог или езды на низкой скорости.
[0069] Если работают одновременно четыре приводных двигателя 1A, а трансмиссия 3 находится в положении первой передачи, то этот режим работы определяется, как седьмой режим EV7 передачи, приводимый электричеством. Режим EV7 работы подходит для работы в условиях полной или чрезмерной нагрузки. Или же режим EV7 работы подходит для транспортного средства с низкой скоростью и высоким крутящим моментом для езды на подъемах под большим углом или для запуска. В условиях полной или чрезмерной нагрузки седьмой режим EV7 передачи может удовлетворить требования езды транспортного средства с высоким крутящим моментом на подъеме или при запуске.
[0070] Если работают одновременно четыре приводных двигателя 1A, а трансмиссия 3 находится в положении первой передачи, то этот режим работы определяется, как восьмой режим EV8 передачи, приводимый электричеством. Режим EV8 работы подходит для работы, например, в условиях полной или чрезмерной нагрузки, запуска на ровных дорогах, езды на подъемах под малым углом или равномерной езды на высокой скорости.
[0071] В соответствии с требованиями к условиям работы транспортного средства в данном варианте осуществления множество групп приводных двигателей могут работать совместно или по отдельности. Множество групп приводных двигателей могут взаимодействовать с различными передачами трансмиссии. Таким образом, можно достичь не только удовлетворения КПД транспортного средства и работы приводных двигателей в зоне высокой эффективности, но также снижения потерь мощности приводных двигателей и повышения эффективности электроприводных систем.
[0072] Третий вариант осуществления
[0073] Как показано на фиг. 6, отличие между третьим вариантом осуществления и вторым вариантом осуществления заключается в том, что множество источников 1 мощности установлены с противоположным расположением. Под противоположным расположением подразумевается, что часть приводных двигателей 1A установлена перед узлом 2 редуктора, а другая часть приводных двигателей 1A установлена за узлом 2 редуктора. Например, в случае двух источников 1 мощности один из двух источников 1 мощности установлен перед узлом 2 редуктора, а два других источника 1 мощности установлены за узлом 2 редуктора. Таким образом, на свободной стороне перед узлом 2 редуктора могут быть установлены другие компоненты или системы транспортного средства для обеспечения расположения для всей системы транспортного средства.
[0074] Четвертый вариант осуществления
[0075] Как показано на фиг. 7, отличие между четвертым вариантом осуществления и вторым вариантом осуществления заключается в том, что множество источников 1 мощности установлены с расположением сзади. Под расположением сзади следует понимать, что все приводные двигатели 1A установлены за узлом 2 редуктора. Таким образом, пространство вдоль осевой длины транспортного средства может быть сэкономлено, и в осевом направлении транспортного средства могут быть установлены другие компоненты или системы для обеспечения размещения системы всего транспортного средства.
[0076] Основываясь на том же техническом замысле, в варианте осуществления настоящего изобретения также представлено электрическое транспортное средство. Электрическое транспортное средство содержит многодвигательную приводную коробку с гибким крутящим моментом в соответствии с любым вариантом осуществления или комбинацией вариантов осуществления, представленных выше. Электрическое транспортное средство включает в себя, но без ограничения, полностью электрический тяжелый грузовой автомобиль, тяжелый грузовой автомобиль с повышенной дальностью хода, тяжелый грузовой автомобиль с заменяемым аккумулятором и т. п.
[0077] Кроме того, в варианте осуществления настоящего изобретения также представлен тяжелый грузовой автомобиль с заменяемым аккумулятором. Тяжелый грузовой автомобиль с заменяемым аккумулятором содержит заменяемый аккумуляторный блок, при этом заменяемый аккумуляторный блок может быть быстро заменен посредством станции замены аккумулятора.
[0078] В соответствии с любым вариантом осуществления или комбинацией нескольких вариантов осуществления могут быть достигнуты следующие полезные эффекты.
[0079] Многодвигательная приводная коробка с гибким крутящим моментом, представленная в варианте осуществления настоящего изобретения, не только может удовлетворить потребности в высоком крутящем моменте при условиях низкой скорости, но также может обеспечить КПД транспортного средства на средних или высоких скоростях. В многодвигательной приводной коробке с гибким крутящим моментом предусмотрен двигатель с множеством групп низких крутящих моментов и высокой скоростью вращения, что может снизить производственные затраты. Используя двухступенчатое устройство переключения передач, прерывание мощности может быть максимально возможно снижено и может быть повышен комфорт вождения. Двухдвигательный контроллер может взаимодействовать с однодвигательным контроллером, тем самым снижая затраты на производство контроллера двигателя. Кроме того, каждый приводной двигатель выполнен с возможностью работы в разные периоды времени, что распределяет накопленный износ приводных двигателей между каждым приводным двигателем. Кроме того, в случае отказа одного приводного двигателя, транспортным средством все еще можно нормально управлять с помощью других приводных двигателей, что повышает надежность электроприводной системы.
[0080] В настоящем описании были описаны различные специфические подробные сведения. Однако следует понимать, что варианты осуществления настоящего изобретения могут быть реализованы без этих специфических подробных сведений. Общеизвестные способы, конструкции и технологии в некоторых вариантах осуществления не были подробно описаны во избежание затруднения понимания настоящего изобретения.
[0081] Следует отметить, что представленные выше варианты осуществления используются лишь в целях иллюстрации технических решений настоящего изобретения и не ограничивают настоящее изобретение. Несмотря на то, что настоящее изобретение было описано подробно со ссылкой на представленные выше варианты осуществления, специалисту в данной области техники будет ясно, что в изобретательский замысел настоящего изобретения могут быть внесены модификации или эквивалентные преобразования в соответствии с частью или всеми техническими решениями настоящего изобретения, при этом данные модификации или эквивалентные преобразования не приводят к выходу соответствующих технических решений за рамки объема настоящего изобретения.
Изобретение относится к транспортным средствам. Многодвигательная приводная коробка с гибким крутящим моментом содержит по меньшей мере два источника мощности, причем каждый из этих источников мощности содержит приводной двигатель и по меньшей мере два узла редуктора, соединенные с указанными по меньшей мере двумя источниками мощности во взаимно однозначном соответствии. Два источника мощности могут работать совместно или по отдельности. Обеспечивается беспрерывная передача мощности и повышается комфорт. 2 н. и 11 з.п. ф-лы, 7 ил.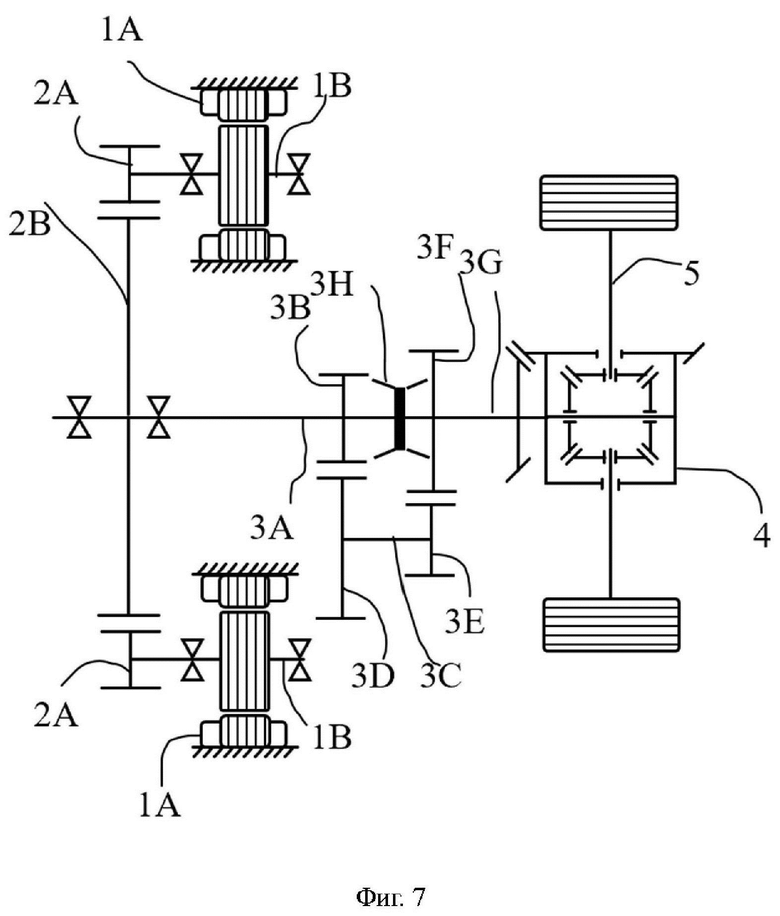
1. Многодвигательная приводная коробка с гибким крутящим моментом, содержащая:
по меньшей мере два источника мощности, причем каждый из указанных по меньшей мере двух источников мощности содержит приводной двигатель для выдачи движущей силы; и
по меньшей мере два узла редуктора, соединенные с указанными по меньшей мере двумя источниками мощности во взаимно однозначном соответствии, причем указанные по меньшей мере два узла редуктора выполнены с возможностью передачи движущей силы,
в которой указанные по меньшей мере два источника мощности выполнены с возможностью работы совместно или по отдельности управляемым образом.
2. Многодвигательная приводная коробка с гибким крутящим моментом по п. 1, дополнительно содержащая дифференциал, причем входной конец дифференциала соединен с выходным концом каждого узла редуктора, а выходной конец дифференциала соответственно соединен с левым приводным валом и правым приводным валом для передачи движущей силы на цапфу колеса, чтобы приводить в движение колесо транспортного средства.
3. Многодвигательная приводная коробка с гибким крутящим моментом по п. 2, дополнительно содержащая трансмиссию, соединяющую входной конец дифференциала с выходным концом каждого узла редуктора.
4. Многодвигательная приводная коробка с гибким крутящим моментом по п. 3, в которой:
каждый источник мощности содержит приводной двигатель и вал двигателя, соединенный с приводным двигателем;
каждый узел редуктора содержит первый передаточный механизм, соединенный с валом двигателя, и второй передаточный механизм, входящий в зацепление с первым передаточным механизмом; и
второй передаточный механизм представляет собой выходной конец узла редуктора.
5. Многодвигательная приводная коробка с гибким крутящим моментом по п. 4, в которой один второй передаточный механизм является общим для указанных по меньшей мере двух узлов редуктора.
6. Многодвигательная приводная коробка с гибким крутящим моментом по п. 5, в которой указанные по меньшей мере два источника мощности установлены по периферии второго передаточного механизма.
7. Многодвигательная приводная коробка с гибким крутящим моментом по п. 4, в которой:
трансмиссия содержит узел входного вала, узел промежуточного вала, узел выходного вала и устройство переключения передач,
узел входного вала содержит входной вал, соединенный со вторым передаточным механизмом, и третий передаточный механизм, соединенный с входным валом,
узел промежуточного вала содержит промежуточный вал, четвертый передаточный механизм и пятый передаточный механизм, при этом оба конца промежуточного вала соединены соответственно с четвертым передаточным механизмом и пятым передаточным механизмом, а четвертый передаточный механизм входит в зацепление с пятым передаточным механизмом,
узел выходного вала содержит выходной вал и шестой передаточный механизм, при этом выходной вал соединен с входным концом дифференциала, шестой передаточный механизм установлен на выходном валу с возможностью вращения, а также шестой передаточный механизм входит в зацепление с пятым передаточным механизмом, и
устройство переключения передач установлено на выходном валу и выполнено с возможностью управления соединением между выходным валом и шестым передаточным механизмом или входным валом.
8. Многодвигательная приводная коробка с гибким крутящим моментом по п. 7, в которой:
при работе трансмиссии на первой передаче устройство переключения передач выполнено с возможностью управления выходным валом для соединения с шестым передаточным механизмом для обеспечения последовательного прохождения движущей силы, передаваемой от узла редуктора, через входной вал, третий передаточный механизм, четвертый передаточный механизм, промежуточный вал, пятый передаточный механизм, шестой передаточный механизм и выходной вал на дифференциал; и
при работе трансмиссии на второй передаче устройство переключения передач выполнено с возможностью управления выходным валом для соединения с входным валом для обеспечения последовательного прохождения движущей силы, передаваемой от узла редуктора, через входной вал и выходной вал на дифференциал с обеспечением двухступенчатого управления транспортным средством.
9. Многодвигательная приводная коробка с гибким крутящим моментом по п. 1, в которой указанные по меньшей мере два источника мощности установлены одним из следующих способов:
расположение спереди, расположение сзади и противоположное расположение.
10. Многодвигательная приводная коробка с гибким крутящим моментом по п. 1, дополнительно содержащая по меньшей мере один двухдвигательный контроллер или по меньшей мере один двухдвигательный контроллер и однодвигательный контроллер, причем количество двухдвигательных контроллеров и однодвигательных контроллеров определяется в соответствии с количеством приводных двигателей.
11. Электрическое транспортное средство, содержащее многодвигательную приводную коробку с гибким крутящим моментом по любому одному из пп. 1-10.
12. Электрическое транспортное средство по п.11, которое включает в себя полностью электрический тяжелый грузовой автомобиль, тяжелый грузовой автомобиль с повышенной дальностью хода и тяжелый грузовой автомобиль с заменяемым аккумулятором.
13. Электрическое транспортное средство по п.12, причем тяжелый грузовой автомобиль с заменяемым аккумулятором содержит заменяемый аккумуляторный блок, при этом заменяемый аккумуляторный блок быстро заменяется посредством станции замены аккумулятора.
| СN 207173300 U, 03.04.2018 | |||
| CN 110126604 А, 16.08.2019 | |||
| УСТРОЙСТВО ДЛЯ ПАРКОВКИ И ПОДЗАРЯДКИ ЭЛЕКТРИЧЕСКИХ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2623375C2 |
| CN 208134053 U, 23.11.2018. | |||

