Изобретение относится к медицинской технике, а именно к устройствам для разработки движений в суставах пальцев рук.
Известно устройство для разработки контактур пальцев кисти, содержащее шину для ладони с элементами крепления и гидрокамерами механизмов сгибания фаланг пальцев, связанными с блоком управления
1.
Известно также устройство для разработки контрактур суставов пальцев рук, содержащее основание с опорной площадкой и электромеханическим приводом, кинематически связанным с ложементами фаланг посредством кривошипа, шатуна и узла бесступенчатого регулирования хода ползуна, оснащенного направляющей 2.
Недостатком известных устройств - невозможность обеспечения разработки паль- цев из различных начальных положений.
Целью изобретения является обеспечение возможности разработки пальцев из различных начальных положений их деформации.
Цель достигается тем, что узел бесступенчатого изменения хода ползуна выполнен в виде втулки, подвижно установленной в направляющей и шарнирно связанной с ложементами фаланг, при этом ползун выполнен с возможностью изменения его длины и перемещения во втулке, ограниченного размещенным на ползуне резьбовым упором.
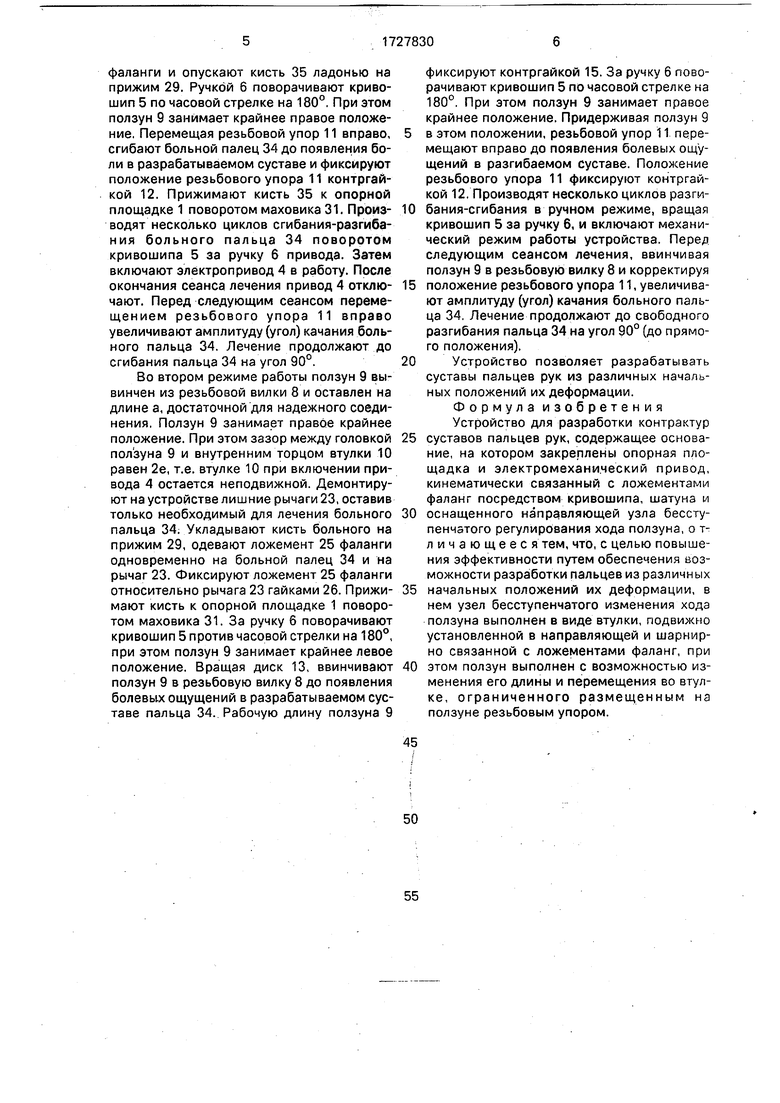
На фиг. 1 показано устройство для разработки контрактур суставов пальцев рук, настроенное на начало работы для случая потери подвижности в прямом положении пальца, общий вид; на фиг. 2 - то же, при настройке на начало работы для случая потери подвижности в согнутом положении пальца; на фиг. 3 - разрез А-А на фиг, 1 (с фрагментом фиксации кисти левой руки перед разработкой любого из четырех прямых пальцев); на фиг. 4 - фрагмент фиксации кисти правой руки; на фиг. 5 - фрагмент фиксации кисти левой руки перед разработкой подвижности большого пальца; на фиг. 6 - то же, правой руки; на фиг. 7 - вид Б на фиг. 1,
Устройство для разработки контрактур суставов пальцев рук состоит из опорной площадки 1, расположенной на стойках 2 основания 3. На опорной площадке 1 установлен электромеханический привод 4 (на- пример, мотор-редуктор РД-0,9) с кривошипом 5. Эксцентричнооси вращения кривошипа 5 установлена ручка 6, которая несет шатун 7, шарнирно связанный с резьбовой вилкой 8, соединенной с ползуном 9, который установлен в отверстии втулки 10с
помощью резьбового упора 11 с контргайкой 12. На ползуне 9 неподвижно закреплен диск 13 посредством штифта 14. Ползун 9 оснащен также контргайкой 15. Втулка 10
расположена в отверстии направляющей 16 с возможностью свободного хода. Максимальное значение хода втулки 10 равно 2е (двум эксцентриситетам кривошипа 5 привода 4). Направляющая 16 закреплена на
0 опорной площадке 1 неподвижно. На, конце втулки 10 расположен резьбовой переходник 17, рабочее положение которого зафиксировано контргайкой 18, На переходнике 17 неподвижно установлена гребенка 19,
5 шарнирно связанная осью 20 с вилками 21, которые, в свою очередь, осями 22 шарнирно связаны с рычагами 23. Последние установлены на опорной площадке 1 с возможностью качания (например, на 90°)
0 вокруг оси 24. Оси 20 и 24 зафиксированы от осевого смещения за счет резьбового выполнения их головок. На свободном конце рычагов 23 установлены сменные ложементы 25 фаланг, положение этих ложементов
5 регулируется гайками 26. Сменные ложементы 25 фаланг выполнены разных типоразмеров (например, диаметром под палец от 13 до 35 мм).
На боковых стойках 2 расположен с воз0 можностью вертикального перемещения кронштейн 27, несущий неподвижный штырь 28 со сменным прижимом 29. Верхняя часть 30 прижима 20 выполнена из эластичного материала (например, из пористой
5 резины). Вертикальное перемещение сменного прижима 29 (для кисти и отдельно для большого пальца руки) обеспечивается поворотом маховика 31, связанного с резьбовой тягой 32 кронштейна 27. На тяге 32
0 расположена пружина 33, обеспечивающая возврат прижима 29 в нижнее положение.
Втулка 10 и направляющая 16 образуют узел бесступенчатого изменения хода ползуна 9.
5 Устройство может быть настроено для работы в двух режимах: для разработки пальца, потерявшего подвижность в прямом положении (фиг, 1), и для разработки пальца, потерявшего подвижность в согну0 том положении (фиг. 2).
В первом режиме ползун 9 занимает крайнее левое положение, а зазор между резьбовым упором 11 и торцом втулки 10 равен двум эксцентриситетам (2е), т.е. втул5 ка 10 при включении электромеханического привода 4 остается неподвижной.
На устройстве оставляют рычаг 23, необходимый для лечения соответствующего пальца, демонтировав лишние рычаги. Вставляют больной палец 34 в ложемент 25
фаланги и опускают кисть 35 ладонью на прижим 29. Ручкой 6 поворачивают кривошип 5 по часовой стрелке на 180°. При этом ползун 9 занимает крайнее правое положение. Перемещая резьбовой упор 11 вправо, сгибают больной палец 34 до появления боли в разрабатываемом суставе и фиксируют положение резьбового упора 11 контргайкой 12. Прижимают кисть 35 к опорной площадке 1 поворотом маховика 31. Произ- водят несколько циклов сгибания-разгибания больного пальца 34 поворотом кривошипа 5 за ручку б привода. Затем включают электропривод 4 в работу. После окончания сеанса лечения привод 4 отклю- чают. Перед следующим сеансом переме- щением резьбового упора 11 вправо увеличивают амплитуду (угол) качания больного пальца 34. Лечение продолжают до сгибания пальца 34 на угол 90°.
Во втором режиме работы ползун 9 вывинчен из резьбовой вилки 8 и оставлен на длине а, достаточной для надежного соединения. Ползун 9 занимает правое крайнее положение. При этом зазор между головкой ползуна 9 и внутренним торцом втулки 10 равен 2е, т.е. втулке 10 при включении привода 4 остается неподвижной. Демонтируют на устройстве лишние рычаги 23, оставив только необходимый для лечения больного пальца 34; Укладывают кисть больного на прижим 29, одевают ложемент 25 фаланги одновременно на больной палец 34 и на рычаг 23. Фиксируют ложемент 25 фаланги относительно рычага 23 гайками 26. Прижи- мают кисть к опорной площадке 1 поворотом маховика 31. За ручку 6 поворачивают кривошип 5 против часовой стрелки на 180°, при этом ползун 9 занимает крайнее левое положение. Вращая диск 13, ввинчивают ползун 9 в резьбовую вилку 8 до появления болевых ощущений в разрабатываемом суставе пальца 34. Рабочую длину ползуна 9
фиксируют контргайкой 15. За ручку 6 поворачивают кривошип 5 по часовой стрелке на 180°. При этом ползун 9 занимает правое крайнее положение. Придерживая ползун 9 в этом положении, резьбовой упор 11 перемещают вправо до появления болевых ощущений в разгибаемом суставе. Положение резьбового упора 11 фиксируют контргайкой 12. Производят несколько циклов разгибания-сгибания в ручном режиме, вращая кривошип 5 за ручку 6, и включают механический режим работы устройства. Перед следующим сеансом лечения, ввинчивая ползун 9 в резьбовую вилку 8 и корректируя положение резьбового упора 11, увеличивают амплитуду (угол) качания больного пальца 34. Лечение продолжают до свободного разгибания пальца 34 на угол 90° (до прямого положения).
Устройство позволяет разрабатывать суставы пальцев рук из различных начальных положений их деформации. Формула изобретения Устройство для разработки контрактур суставов пальцев рук, содержащее основание, на котором закреплены опорная площадка и электромеханический привод, кинематически связанный с ложементами фаланг посредством кривошипа, шатуна и оснащенного направляющей узла бесступенчатого регулирования хода ползуна, о т- личающеес я тем, что, с целью повышения эффективности путем обеспечения возможности разработки пальцев из различных начальных положений их деформации, в нем узел бесступенчатого изменения хода ползуна выполнен в виде втулки, подвижно установленной в направляющей и шарнир- но связанной с ложементами фаланг, при этом ползун выполнен с возможностью изменения его длины и перемещения во втулке, ограниченного размещенным на ползуне резьбовым упором.
Ч
Фаг.б
Я ,52.


Изобретение относится к медицинской технике и предназначено для восстановления полного объема движений в суставах пальцев рук. Цель - обеспечение возможности разработки пальцев из различных начальных положений их деформации. Устройство содержит основание 3, на котором посредством стоек 2 закреплены опорная площадка 1 и электромеханический привод 4 с кривошипом 5, ручкой 6, несущей шатун 7, соединенный с ползуном 9. Регулирование хода ползуна 9 производится поворотом резьбового упора .11. Поворотом диска 13 производится изменение длины ползуна 9. На опорной площадке 1 расположены рычаги 23, на свободных концах которых установлены сменные разных типоразмеров ложементы 25 фаланг. Для разработки деформированного пальца 34 поворачивают кривошип 5 по часовой стрелке. При этом происходит сгибание и разгибание больного пальца на установленный угол. 7 ил. (Л С
| Опубликованная заявка ФРГ № 3437606, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| Устройство для разработки контрактур суставов | 1988 |
|
SU1532038A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
