Изобретение относится к электротехнике и автоматике, в частности к исполнительным устройствам модульного типа для использования, например, в автоматизированных системах регулирования скорости двигателей внутреннего сгорания.
Известно электромагнитное исполнительное устройство, которое включает в себя, магнитопроводящие статор и якорь, корпус, выходной вал, связанный с якорем, ось, электрическую катушку, датчик положения вала и пружину, связанную одним концом с якорем, а другим - с корпусом. При этом якорь установлен на подшипниковых опорах относительно оси, установленной в корпусе.
Однако известное устройство характеризуется недостатачной жесткостью конструкции подвески якоря, высокой теплонапряженно- стью обмотки и невозможностью повышения (наращивания) мощности устройства по модульному принципу, что ограничивает возможности практического использования указанного устройства.
Известно также устройство модульного типа, содержащее модульную головку, вал, датчик положения вала, механическую передачу, систему пружин и электромагнитные модули, каждый из которых включает в себя статор, якорь, электрическую катушку, шток, жестко связанный с якорем и установленный в подшипниковых опорах. При этом модульная головка связана с одним из модулей, вал через механическую передачу связан с одним из штоков, модули соединены друг с другом последовательно, штоки находятся в физическом контакте, а направления перемещения всех штоков при возбуждении тока в обмотках электрических катушек совпадают.
Недостатком такого устройства является высокая теплонапряженность электрических катушек в процессе эксплуатации, что повышает вероятность выхода их из строя и обуславливает недостаточно надежную работу устройства в целом.
Цель изобретения - повышение эксплуатационной надежности электромагнитного исполнительного устройства.
Поставленная цель достигается тем, что известное устройство, содержащее модульную головку, вал с механической передачей, датчик положения, упругий элемент и два модуля, каждый из которых включает магнитол ровод я щий статор, подшипниковые опоры, катушку, якорь со штоком, установленным в подшипниковых опорах, снабжено соединителем, резервным приводом, корпусом, с расположенными в нем электромеханическим приводом с зубчатым
сектором и муфтой, шток якоря по крайней мере одного из модулей снабжен винтовой нарезкой и шлицами, соединитель размещен в модульной голове и соединен со штоками якорей обоих модулей и с датчиком положения, корпус связан по крайней мере с одним из модулей, резервный привод связан с корпусом с возможностью взаимодей- ствия с якорем через муфту,
0 электромеханический привод установлен с возможностью взаимодействия его зубчатого сектора с винтовой нарезкой штока якоря.
На чертеже представлена конструктив5 ная схема электромагнитного исполнительного устройства.
Устройство включает в себя модульную головку 1 с размещенными в ней соединителем 2, валом 3 с механической передачей 4,
0 датчиком 5 положения и упругим элементом (пружиной) 6, два сходных (конструктивно) модуля, каждый из которых включает магни- топроводящий статор 7, якорь 8, подшипниковые опоры 9, электрическую катушку 10 и
5 шток 11 якоря 8. Устройство дополнительно содержит корпус 12 с размещенным в нем участком штока 11 якоря 8 одного из модулей, снабженным винтовой нарезкой 13, которая соответствует нарезке зубчатого
0 сектора 14, связанного с электромеханическим приводом .15, шлицевую муфту 16 и резервный привод 17. При этом соединитель 2 связан с датчиком 5 положения, механической передачей4 вала3 и соштоками
5 11 якорей 8,
Устройство работает следующим образом.
В нормальном режиме работы устройства, например, при регулировании скорости
0 главных судовых двигателей осуществляется позиционирование соединителя 2 и связанного с ним через механическую передачу 4 вала 3 за счет согласованного изменения токов в катушках 10, изменяющего баланс
5 усилий, возникающих при взаимодействии якорей 8 и статоров 7 и действующих на соединитель 2 через штоки 11 модулей. Контроль фактического положения соединителя 2 и вала 3, связанных с приводным механиз0 мом (например, рейками топливных насосов двигателя), осуществляется с помощью датчика 5 положения, который электрически связан с внешним по отношению к устройству блоком (не показан).
5 В установившемся режиме обе катушки 10 возбуждены одновременно и создают противоположно направленные усилия. При этом ток в одной из катушек 10 может быть минимальным, вплоть до нулевого, в другой - относительно малым, таким, чтобы создать электромагнитную силу, достаточную для уравновешивания создаваемого упругим элементом 6 малого усилия. Величина тока при работе устройства задается упомянутым внешним блоком. При необходимо- сти перемещения исполнительного устройства в одном из двух возможных направлений ток в одной из катушек 10 уменьшается (в пределе до 0), а в другой возрастает (в пределе до максимально допу- стимого по условиям работы системы значения). Этот ток определяет максимальную перестановочную силу, развиваемую устройством. Таким образом, в установившихся режимах, которые преобладают в большинстве практических применений (например, в системах регулирования скорости двигателей), потребляемый ток относительно мал, достигая больших значений только в переходных режимах. Этим обеспечивает- ся общее снижение энергопотребления и теплонапряженности исполнительного устройства модульного типа.
В случае аварийной ситуации, например при исчезновении основного электри- ческого сигнала, подвижная часть электромеханического привода 15 по сигналу от внешнего источника (не показан) приводит зубчатый сектор 14 в зацепление с винтовой нарезкой 13 на штоке 11 и тем самым фиксирует шток 11, соединитель 2 и вал 3 в положении, предшествовавшем аварийной ситуации. При необходимости аварийного позиционирования выходных элементов устройства шлицевая муфта 16 вводится в зацепление со штоком 11, на конце которого имеются продольные шлицы, и приводится во вращение с помощью резервного привода 17 (вручную или автоматически). При этом шток 11, взаимодейст- вуя с зубчатым сектором 14, перемещается совместно с соединителем 2 в осевом направлений, поворачивая с помощью механической передачи 4 вал 3, чем достигается аварийное позиционирование связанного с валом 3 приводимого механизма (например, реек топливного насоса двигателя).
В случае, если в аварийном режиме необходима установка соединителя 2 и вала 3
в одно из крайних положений, например при необходимости останова двигателя при исчезновении электропитания сигнал на срабатывание электромеханического привода 15 не поступает, зубчатый сектор 14 остается в неподвижном состоянии и упругий элемент 6, разжимаясь, перемещает соединитель 2 и соответственно вал 3 в заданное крайнее положение.
Поскольку при работе устройства в отличие от прототипа отсутствует потребность в постоянном поддержании значительного тока катушек его модулей, необходимого для обеспечения величины электромагнитной силы, компенсирующей усилие сжатия силовой возвратной пружины, оно характеризуется пониженной теплонапряженно- стью обмоток электрических катушек и повышенной эксплуатационной надежностью.
Формула изобретения Электромагнитное исполнительное устройство, содержащее модульную головку, вал с механической передачей, датчик положения, упругий элемент и два модуля, каждый из которых включает магнитопрово- дящий статор, подшипниковые опоры, катушку, якорь со штоком, установленным в подшипниковых опорах, отличающее- с я тем, что, с целью повышения эксплуатационной надежности, оно снабжено соединителем, резервным приводом, корпусом с расположенными в нем электромеханическим приводом с зубчатым сектором и шли- цевой муфтой, шток якоря по крайней мере одного из указанных модулей снабжен винтовой нарезкой и шлицами, указанный соединитель размещен в указанной модульной головке и соединен со штоками якорей обоих указанных модулей и с указанным датчиком положения, указанный корпус связан по крайней мере с одним из указанных модулей, резервный привод связан с корпусом с возможностью взаимодействия с якорем через муфту, указанный электромеханический привод установлен в корпусе с возможностью взаимодействия его зубчатого сектора с указанной винтовой нарезкой штока якоря.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления механизмом перемещения | 1983 |
|
SU1174227A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2009 |
|
RU2427750C2 |
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПЕРЕКЛЮЧАЕМЫМИ ФАЗНЫМИ ОБМОТКАМИ | 2018 |
|
RU2698464C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕКУПЕРАТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2001 |
|
RU2210849C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2007 |
|
RU2362260C2 |
| БЕСКОНТАКТНАЯ МОДУЛЬНАЯ СИНХРОННАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2414794C1 |
| БЕСКОНТАКТНАЯ МОДУЛЬНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2414793C1 |
| Бесконтактная электрическая машина торцового типа | 1988 |
|
SU1539914A1 |
| МОДУЛЬНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ (МВЭП) | 2006 |
|
RU2310966C1 |
| ЭЛЕКТРОНЕФТЕКАЧАЛКА | 2006 |
|
RU2308615C1 |
Изобретение относится к электротехнике и автоматике, в частности к исполнительным устройствам для использования, например, в автоматизированных системах регулирования скорости двигателей внутреннего сгорания. Цель - повышение эксплуатационной надежности. Электромагнитное исполнительное устройство содержит модульную головку 1 с соединителем 2, валом 3 с механической передачей 4, датчиком 5 положения, пружиной 6, два электромагнита с якорями 8. установленными на штоках 11 в подшипниках 9. Шток 11 содержит винтовую нарезку 13. предназначенную для взаимодействия с зубчатым сектором 14 электромеханического привода 15. В корпусе 12 установлен резервный привод 17, предназначенный для взаимодействия со штоком якоря 8. Цель достигается встречным взаимодействием якорей 8, чем уменьшается усилие электромагнитов и нагрев их обмоток, а также включением в аварийной ситуации электромеханического привода 15 и стопорение им подвижных частей. 1 ил. 17 (/ с VI ю о о ю ч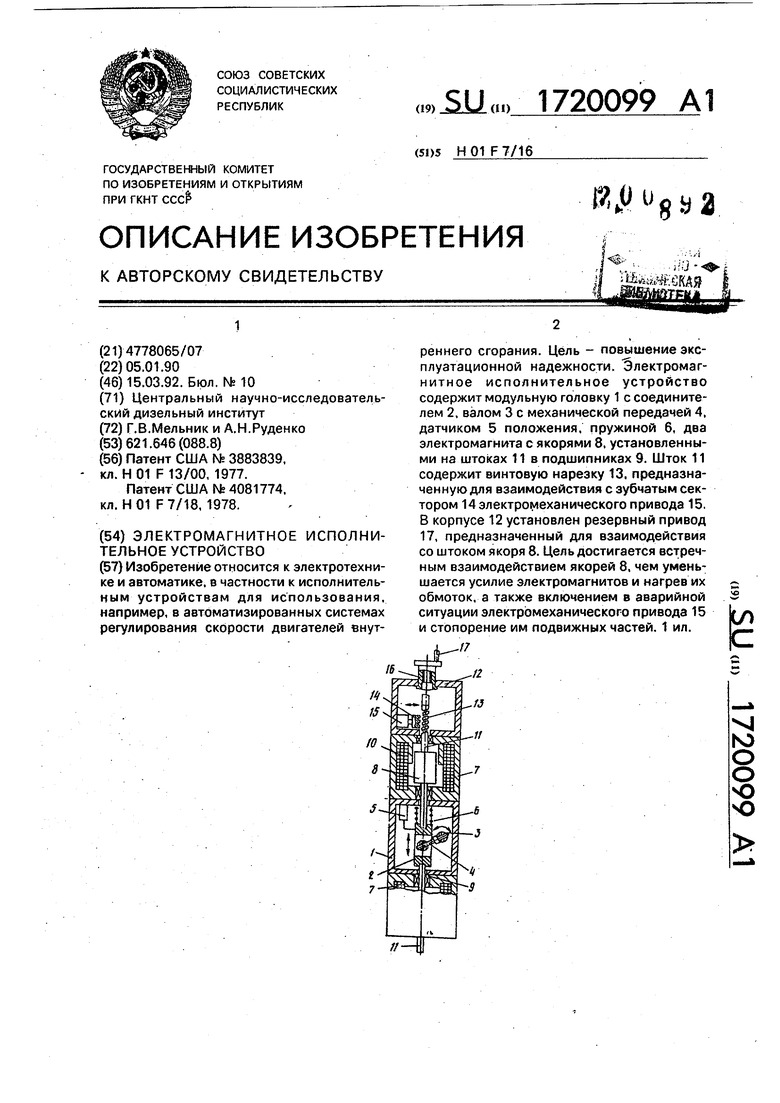
| Патент США № 3883839, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 4081774 | |||
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
