Изобретение относится к электромашиностроению, а именно к шаговым электродвигателям, и может быть использовано в качестве исполнительного устройства jjHCKpeTHoro привода в автоматических системах.
Известны шаговые двигатели,функционально отрабатывающие заданный неизменный шаг, определяемый конструктивно размерами полюсов двигателя 1.
Это является серьезным недостатком так как приходится создавать серию двигателей в пределах одного габарита, отличающихся в основном, величиной шага. Если же величина шага серийного двигателя не удовлетворяет требованиям вновь создаваемых конструкций, приходится применять редукторы. Что также неудобно.
Известен шаговый электродвигатель содержащий статор, обмотки управления, подключенные к системе управления, два рабочих ротора с зубчатыми магнитопроводами, один из которых закреплен на валу, а другой на втулке, охватывакяцей вал .
Этот двигатель имеет неизменный 5шаг, определяемый угловыми размерами зубцов, что ограничивает егоприменение .
Цель изобретения - расширение области применения путем регулирования шага от нуля до углового размера зубцов,
Поставленная цель достигается тем, что шаговый электродвигатель, содержащий статор, обмотки управления, подключенные к системе управления, два рабочих ротора с зубчатыми магнитопроводами, один из которых закреплен на валу, а другой на втулке, охватывающей вал, снабжен механизмом рассогласования, промежуточным ориентирующим ротором, установленным между указанными рабочими роторс1ми и электромагнитами с тормозными колодками, расположенными над одним из рабочих роторов и промежуточным ротором, механизм рассогласования содержит два диска, установленных относительно друг друга с возможностью ограниченного поворота, один диск закреплен на валу, а другой - на втулке. Промежуточный ротор содержит зубчатые магнитопроводы на торцовых поверхностях, причем зубцы магнитопроводов рабочих роторов выполнены на обращенных друг к другу торцовых поверхностях.
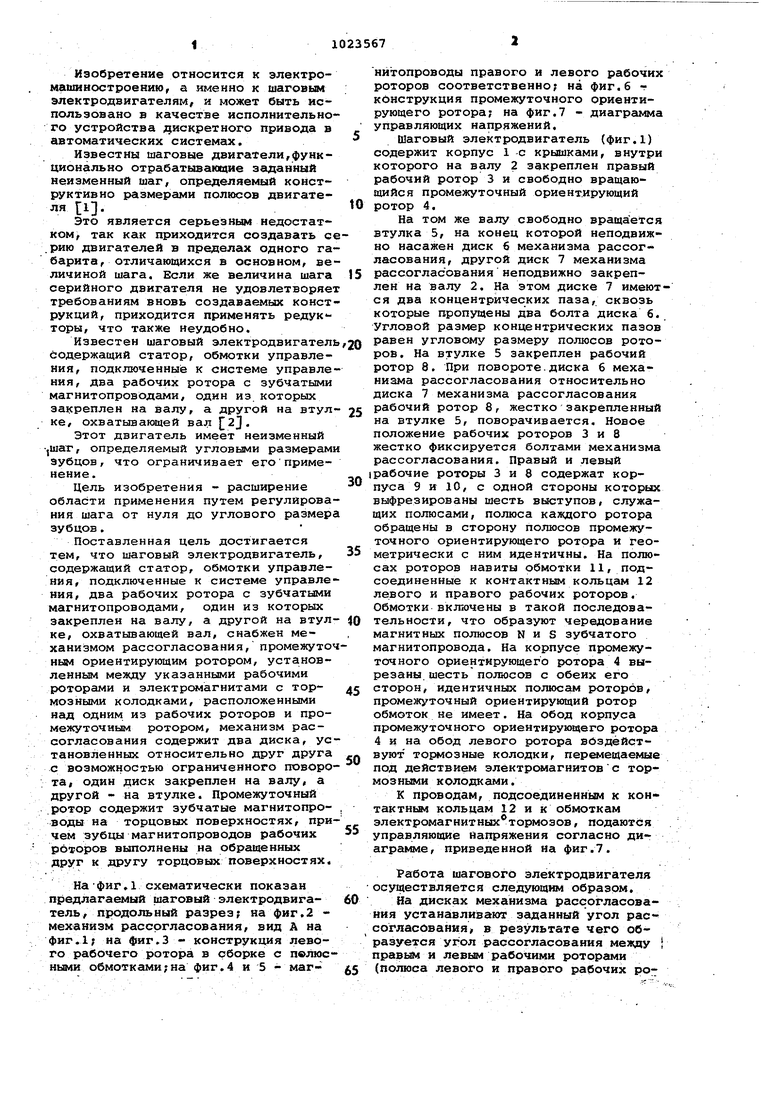
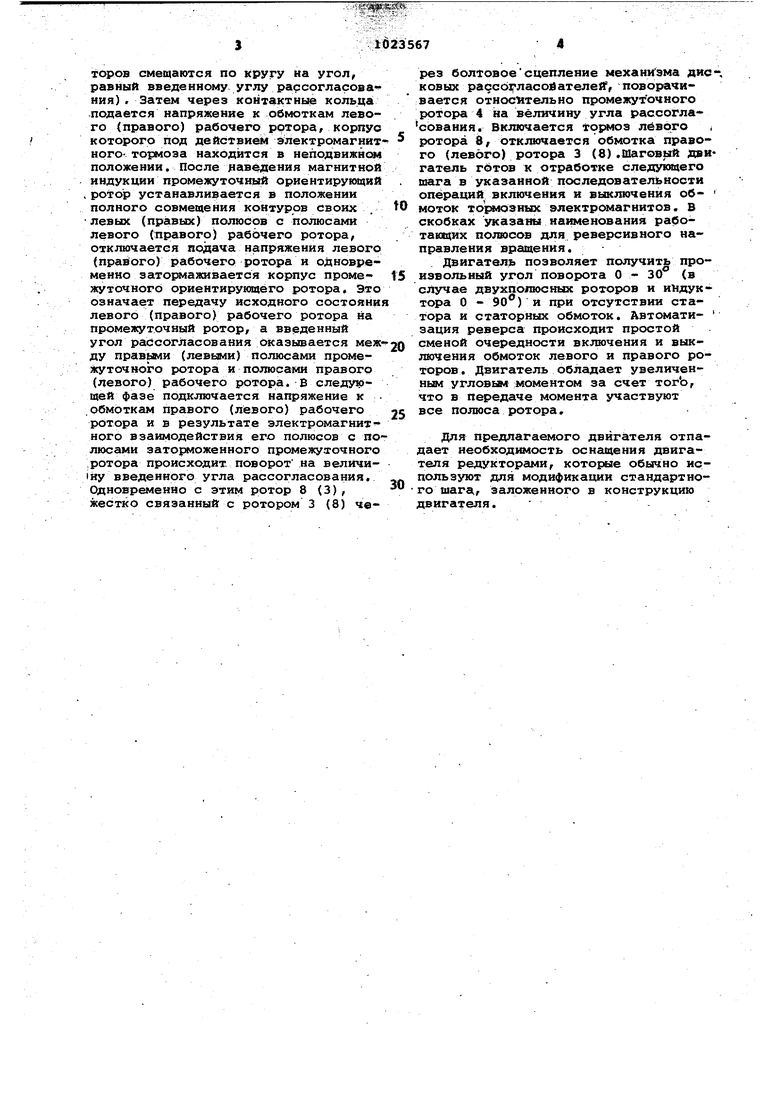
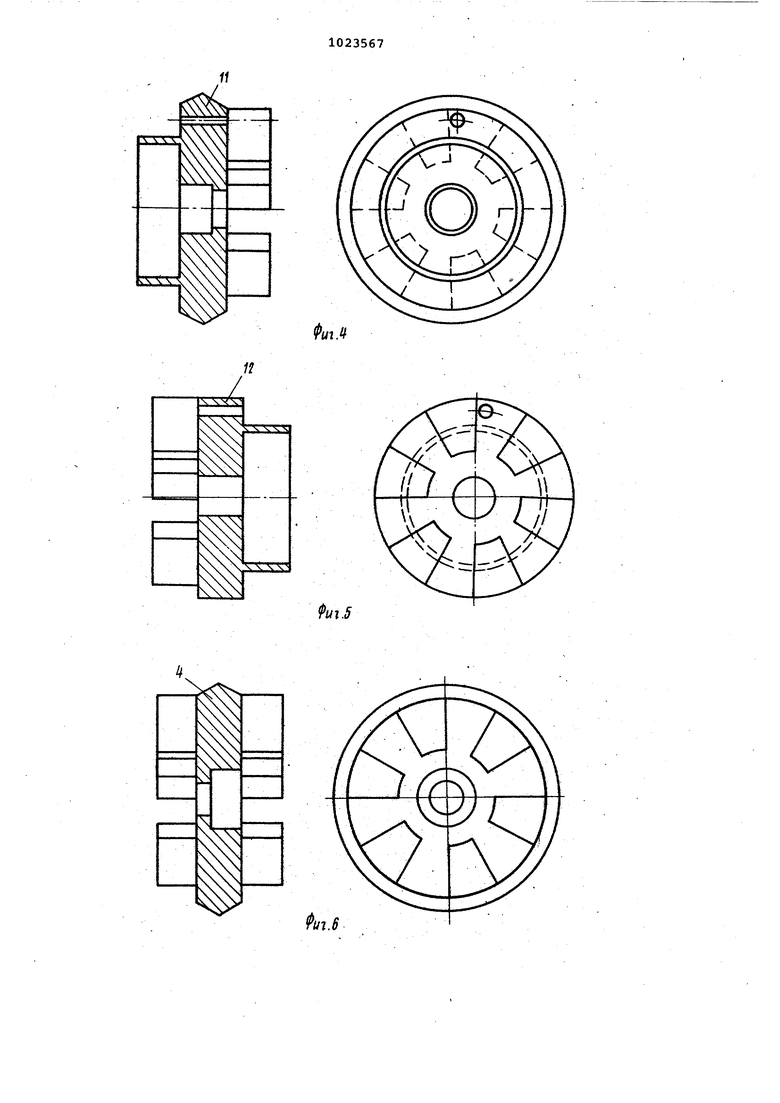
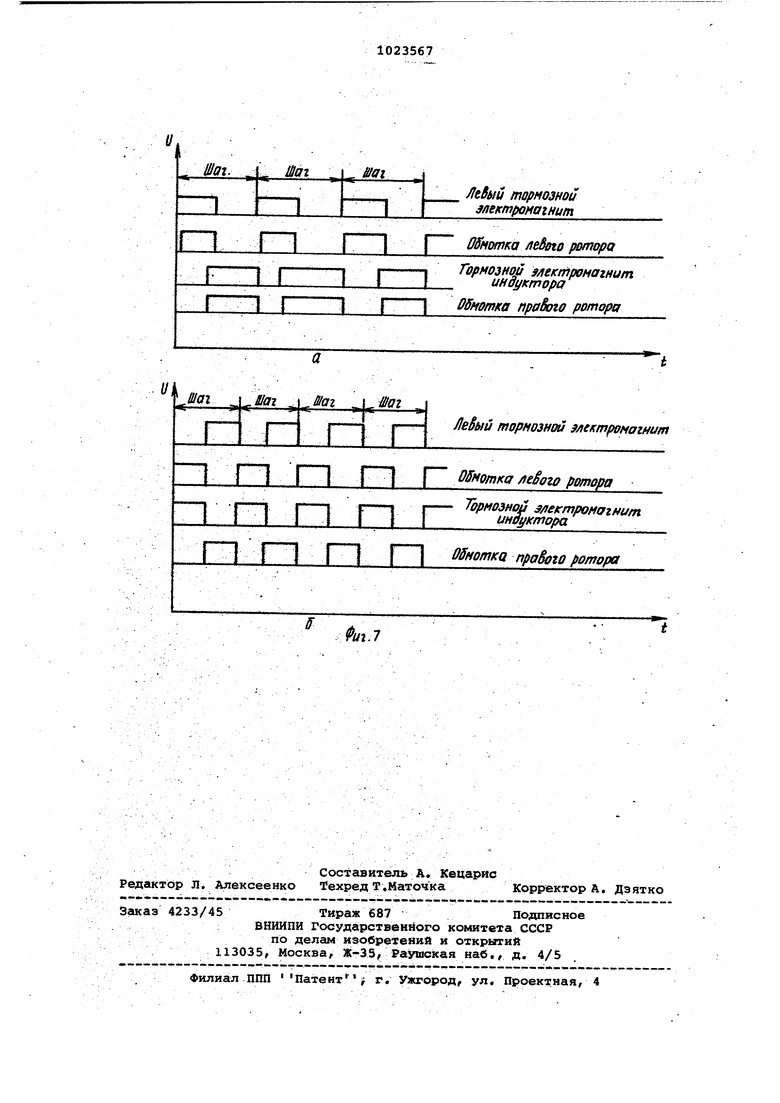
На-фиг, схематически показан предлагаемый шаговый электродвигатель, продольный разрез; на фиг.2 механизм рассогласования, вид А на фиг.1; на фиг.З - конструкция левого рабочего ротора в сборке с полюсными обмотками;на фиг.4 и 5 - магнйтопроводы правого и левого рабочих роторов соответственно; на фиг.б г конструкция промежуточного ориентирующего ротора; на фиг.7 - диагргиима управляющих напряжений.
Шаговый электродвигатель {фиг.1) содержит корпус 1 с крышками, внутри которого на валу 2 закреплен правый рабочий ротор 3 и свободно вращающийся промежуточный ориентирующий ротор 4.
На том же валу свободно вращается втулка 5, на конец которой неподвижно насажен диск 6 механизма рассогласования, другой диск 7 механизма рассогласования неподвижно закреплен на валу 2. На этом диске 7 имеются два концентрических паза, сквозь которые пропущены два болта диска б. Угловой размер концентрических пазов равен угловсалу размеру полюсов роторов. На втулке 5 закреплен рабочий ротор 8. При повороте.диска 6 механизма рассогласования относительно диска 7 механизма рассогласования рабочий ротор 8, жесткозакрепленный на втулке 5, поворачивается. Новое положение рабочих роторов 3 и 8 жестко фиксируется болтами механизма рассогласования. Правый и левый I рабочие роторы 3 и 8 содержат корпуса 9 и 10, с одной стороны которых выфрезированы шесть выступов, служащих полюсами, полюса каждого ротора обращены в сторону полюсов промежуточного ориентирующего рютора и геометрически с ним идентичны. На полюсах роторов навиты обмотки 11, подсоединенные к контактным кольцам 12 левого и правого рабочих роторов. Обмотки включены в такой последовательности, что образуют чередование магнитных полюсов N и S зубчатого магнитопровода. На корпусе промежуточного ориентирующего ротора 4 вырезаны, шесть полюсов с обеих его сторон, идентичных полюсам роторов, промежуточный ориентирующий ротор обмоток не имеет. На обод корпуса промежуточного ориентирующего ротора 4 и на обод левого ротора вйздействуют тормозные колодки, перемещаемые под действием электромагнитов с тормозными колодками.
К проводам, подсоединенным к контактньм кольцам 12 и к обмоткам электромагнитных тормозов, подаются управляющие Напряжения согласно диаграмме, приведенной на фиг.7.
Работа шагового электродвигателя осуществляется следующим образом.
На дисках механизма рассогласования устанавливают заданный угол рассогласования, в результате чего образуется угол рассогласования между правым и левым рабочими роторгми (полюса левого и правого рабочих роторов смещаются по кругу на угол, равный введенному углу рассогласова ния) , Затем через контактнь кольца1 .подается напряжение к обмоткам левого (правого) рабочего ротора, корпус которого под действием электромагнитного- тормоза находится в неподвижй положении. После заведения магнитной индукции промежуточный ориентирующий
.ротор устанавливается в положении полного совмещения контуров своих .
левых (правых) полюсов с полюсами левого (правого) рабочего ротора, отключается подача напряжения левого (правого) рабочего ротора и одновременно затормаживается корпус промежуточного ориентирукяцёго ротора, Это означает передачу исходного состояния левого (правого) рабочего ротора на промежуточный ротор, а введенный угол рассогласования оказывается между правыми (левыми) полюсами прсмежуточного ротора и полюсами правого (левого) рабочего ротора. В следующей фазе подключается напряжение к
.обмоткам правого (левого) рабочего ротора и в результате электромагнит ного взаимодействия его полюсов с полюсами заторможенного промежуточного
.ротора происходит, поворот на велйчиIну введенного угла рассогласования, Одновременно с этим ротор 8 (3), жестко связанный с ротором 3 (8) че1023567
рез болтовоесцепление механизма дисковых рассб ласобателеЛГ, поворачивается относительно промежуточного ротора 4 на величину угла рассогласования. Включается тормоз левого ротора 3, отключается обмотка правого (левого) ротора 3 (8).Шаговый двигатель готов к отработке следующего шага в указанной последовательности операций включения и выключения обмоток тормозных электромагнитов. В скобках указаны наименования работакщих полюсов для реверсивного направления вращения. Двигатель позволяет получить произвольный угол поворота О - 30 (в случае двухполюсных роторов и иИдуктора О - 90) и при отсутствии статора и статорных обмоток. Автоматизация реверса происходит простой сменой очередности вктпочения и выключения обмоток левого и правого роторов. Двигатель обладает увеличенKtat угловым моментом за счет тогЬ, что в передаче момента участвуют все полюса ротора.
Для предлагаемого двигателя отпадает необходимость оснащения двигателя редукторами, которые обычно используют для модификации стандартного шага,, заложенного в конструкцию двигателя. ////////// W
A
f I If
Ul.l
Потса
11
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электродвигатель | 1981 |
|
SU989696A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| Шаговый электродвигатель | 1987 |
|
SU1713040A1 |
| Электромагнитная муфта-тормоз | 1987 |
|
SU1520634A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321144C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2006144C1 |
| Шаговый электродвигатель | 1976 |
|
SU639100A1 |
| Пьезоэлектромагнитный шаговый двигатель для перемещения носителя информации | 1988 |
|
SU1583996A1 |
| МЕХАТРОННОЕ УСТРОЙСТВО | 2013 |
|
RU2543522C2 |
шаговый ЭЛЕКТРОДВИГАТЕЛЬ, содержащий статор, обмотки управления, подключенные к системе управления, два рабочих ротора с эубчатьми магнитопроводами, один из которых закреплен на валу, а другой на втулке, охватывакицей вал, о т л и ч а ющ и и с я тем, что, с целью расширения области применения путем регулирования шага от нуля до углового размера зубцов, он снабжен механизмом рассогласования, промежуточным ориентирующим ротором, установленны у между указанными рабочими роторами it электромагнитами с тормозными колодками, расположенными нащ одним из рабочих роторов и промежуточным ротором, механизм рассогласования содержит два диска, установленных относительно друг другас возможностью ограниченного поворота, один диск закреплён на валу, а другой диск закреплен на втулке, промежуточный ротор содержит зубчатые магнитопроводы на торцовых поверхностях, причем зубцы магнитопроводов рабочих роторов выполнены на обршценных друг кдругу, торцовых поверхностях.
ui.S
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Лежнев Э.И Имлульснь е двигателив системах автоматики | |||
| ЦНИИТЭИ, 1962, 2, Авторское свидетельство СССР 636750, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
