ОБЛАСТЬ ТЕХНИКИ
Настоящий способ относится к области медицины и ветеринарии, а именно к травматологии и ортопедии, и может быть использован при коррекции и моделировании торсионных деформаций длинных костей конечностей человека и животных при функционирующих зонах роста.
УРОВЕНЬ ТЕХНИКИ
Известен способ коррекции торсионных деформаций бедренной кости на основании метода управляемого роста у детей, предложенный J.-D. Metaizeau et al. (2019). Согласно данному способу, часть продольного роста модифицируется в торсионный путем установки системы, состоящей из двух канюлированных винтов и стального троса в области дистального метаэпифиза бедренной кости. Способ осуществляется следующим образом. Под рентгенологическим контролем через середину кости в сагиттальной плоскости, через зону роста проводится спица. К данной спице фиксируется кольцевая опора от аппарата внешней фиксации и центрируется таким образом, чтобы середина кольца совпадала с серединой зоны роста. Далее выше и ниже зоны роста и параллельно ей проводятся две спицы-проводника для последующего введения канюлированных винтов под углом 30 градусов относительно первой спицы. Дистальная спица-проводник проводится в передне-заднем направлении из точки, расположенной латеральнее края наружного мыщелка бедра. Введение проксимальной спицы-проводника осуществляется сзади наперед из точки, расположенной в месте соединения задней и латеральной поверхностей бедренной кости. Затем кольцевая опора и фиксированная к ней спица удаляются. Через два небольших разреза по медиальной поверхности нижней трети бедра по имеющимся проводникам вводятся два канюлированных винта. Трос проводится через проксимальный винт в медиально-латеральном направлении, затем извлекается и проходит под мягкими тканями, после чего проводится в латерально-медиальном направлении через дистальный винт. Концы троса фиксируются друг к другу с натяжением силой 100 Нм. По мере роста напряжение в тросе вызывает деторсионный эффект.Решение об удалении металлоконструкций принимается на основании клинических и рентгенологических (рентгенография, компьютерная томография) данных по достижении между винтами угла менее 15 градусов в аксиальной плоскости либо при полной коррекции деформации.
Недостатки метода:
- возникновение контрактур коленного сустава;
- отсутствие возможности прогнозирования величины коррекции деформации на этапе предоперационного планирования;
- низкая точность коррекции;
- возникновение вторичных деформаций и укорочения оперируемой конечности.
Известно, что использование метода предоперационного 3D-моделирования и прототипирования при корригирующих (в том числе, деторсионных) остеотомиях длинных костей в сочетании с погружным остеосинтезом позволяет повысить точность коррекции деформации, сделать ее «запрограммированной» (Victor J., Premanathan А., 2013). На основании данных компьютерной томографии выполняется трехмерная реконструкция конечности, определяется вершина деформации. Затем в компьютерной программе моделируется оперативное вмешательство: производится остеотомия виртуальной 3D модели сегмента на вершине деформации, после чего выполняется коррекция деформации. Подбирают вид, модель и размер пластины и винтов из имеющихся библиотек накостных пластин. Затем выполняют остеосинтез костных фрагментов в их новом положении - положении состоявшейся коррекции деформации. Следующим этапом костные фрагменты возвращают в начальное положение (положение до коррекции деформации), при этом отверстия под винты и плоскость остеотомии остаются сохранными. Затем проектируется шаблон-направитель с отверстиями под выбранную пластину и пазом для введения остеотома или пилы. При этом шаблон моделируется таким образом, что обеспечивается его плотное прилегание к поверхности кости, что позволяет достичь полного соответствия уникальной анатомии кости и исключает его неправильную установку. Данный шаблон распечатывается из полимерных материалов на 3D-принтере, подвергается стерилизации и применяется во время операции. После осуществления хирургического доступа и оголения кости в области интереса, шаблон устанавливают на кость. Отверстия шаблона служат направителями для формирования отверстий под винты и под остеотом (или пилу) для пересечения кости. Затем шаблон снимают и выполняют коррекцию деформации, после чего устанавливают пластину таким образом, чтобы винты пластины, проходили в области отверстий, сформированных по шаблону. Это обеспечивает высокую точность коррекции деформации.
Недостатки метода:
- данная методика подразумевает пересечение кости (остеотомию), что само по себе является высокотравматичным вмешательством. Оголение кости, необходимое для установки шаблона, в сочетании с остеотомией кости зачастую является причиной замедленной консолидации костных фрагментов и формирования ложного сустава;
- невозможность ранней нагрузки на оперируемую конечность.
Наиболее близким по технической сущности и решаемой задаче, а также выбранным в качестве прототипа является способ коррекции торсионных деформаций длинных костей конечностей растущих лабораторных животных, согласно которому осуществляется временный эпифизеодез медиальной и латеральной порций зоны роста кости восьмиобразными пластинами. При этом пластины устанавливают в косом направлении относительно друг друга и зоны роста (Arami A. et al., 2013, Cobanoglu М. et al., 2016, Sevil-Kilimci F. et al., 2017, Lazarus D.E. et al., 2017). Такое положение металлоконструкций индуцирует изменение направления роста кости в горизонтальной плоскости. Для достижения наружной торсии медиальная пластина устанавливается таким образом, что ее дистальная часть располагается кзади. Латеральная пластина, соответственно, устанавливается в противоположном направлении. По мере роста дистальная часть медиальной пластины перемещается кпереди, латеральной - кзади, тем самым достигая параллельного положения относительно оси кости. В свою очередь, для достижения внутренней торсии дистальную часть медиальной пластины ориентируют кпереди, а дистальную часть латеральной - кзади.
Недостатки способа:
- отсутствие возможности прогнозирования величины коррекции деформации на этапе предоперационного планирования;
- возникновение вторичных деформаций во фронтальной и сагиттальной плоскостях, а также укорочение конечности;
Таким образом, очевидна потребность в дальнейшем совершенствовании возможностей лечения торсионных деформаций длинных костей конечностей человека и животных, в разработке методов, сочетающих в себе высокую точность коррекции и малую травматичность.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения состоит в повышении точности коррекции и моделирования торсионных деформаций длинных костей конечностей при функционирующих зонах роста, снижении травматичности оперативного вмешательства.
Техническим результатом изобретения является обеспечение максимальной точности коррекции и моделирования торсионных деформаций длинных костей конечностей при функционирующих зонах роста с сохранением минимальной травматичности оперативного вмешательства.
Заявляемый способ коррекции и моделирования торсионных деформаций длинных костей конечностей при функционирующих зонах роста, включает следующие этапы:
выполняют компьютерную томографию конечности или сегмента конечности,
по полученной компьютерной томограмме измеряют исходную величину торсии кости, определяют величину необходимой коррекции или моделируемой деформации, с определением планируемой величины торсии;
по данным компьютерной томографии выполняют 3D реконструкцию сегмента конечности, подлежащего коррекции или моделируемой деформации, с получением его трехмерной модели;
по полученной трехмерной модели определяют анатомическую ось кости;
на полученной трехмерной модели выполняют виртуальную поперечную остеотомию на уровне зоны роста с формированием двух фрагментов кости;
на полученной трехмерной модели выполняют 3D-реконструкцию поворота одного фрагмента относительно другого вокруг анатомической оси кости на заданный угол из исходного положения в положение коррекции или деформации в соответствии с планируемой величиной торсии, с получением модели коррекции или деформации;
на полученной модели коррекции или деформации определяют положения для установки двух накостных пластин и четырех винтов, при этом пластины располагают параллельно друг другу и перпендикулярно зоне роста по латеральной и медиальной поверхностям кости, а винты, введенные в проксимальные отверстия пластины, располагают выше зоны роста, винты, введенные в дистальные отверстия пластины, располагают ниже зоны роста;
данное положение накостных пластин определяют как конечное желаемое положение, которое будет достигнуто при завершении коррекции или деформации кости;
один фрагмент кости возвращают в исходное положение относительно другого фрагмента кости, при этом сохраняют ранее определенные места для введения винтов;
формируют шаблон-направитель с отверстиями под винты согласно положениям установки винтов на полученной модели коррекции или деформации;
во время операции осуществляют временную установку шаблона-направителя на кость с формированием отверстий в кости по упомянутому шаблону-направителю;
извлекают шаблон-направитель и осуществляют установку выбранных пластин и костных винтов в сформированные отверстия;
по мере функционирования зоны роста и продольного роста кости происходит коррекция или деформация кости во времени в соответствии с запланированной величиной торсии, а также изменение положения накостных пластин в соответствии с конечным желаемым положением;
по мере функционирования зоны роста и соответствующего продольного роста кости выполняют этапные контрольные рентгеновские снимки конечности, в ответ на достижение конечного желаемого положения коррекции и/или деформации, удаляют пластины и винты.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
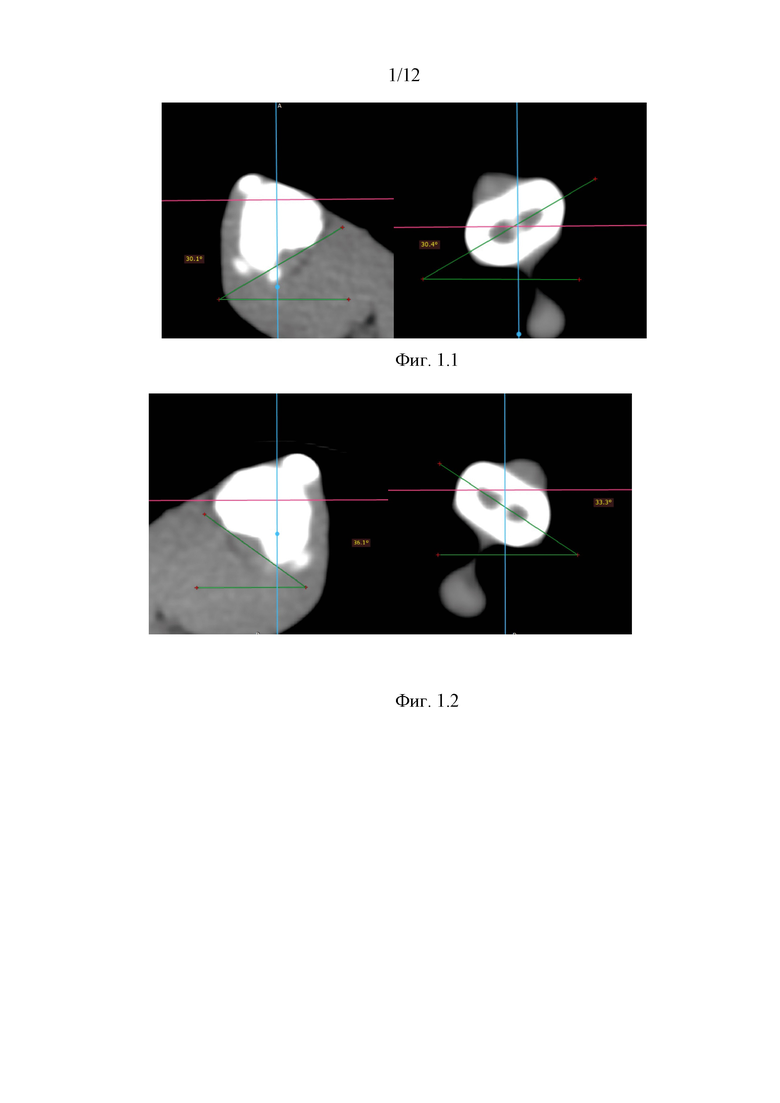
На Фиг. 1.1-1.2 показана компьютерная томограмма задних конечностей кролика (в исходном состоянии, до операции),
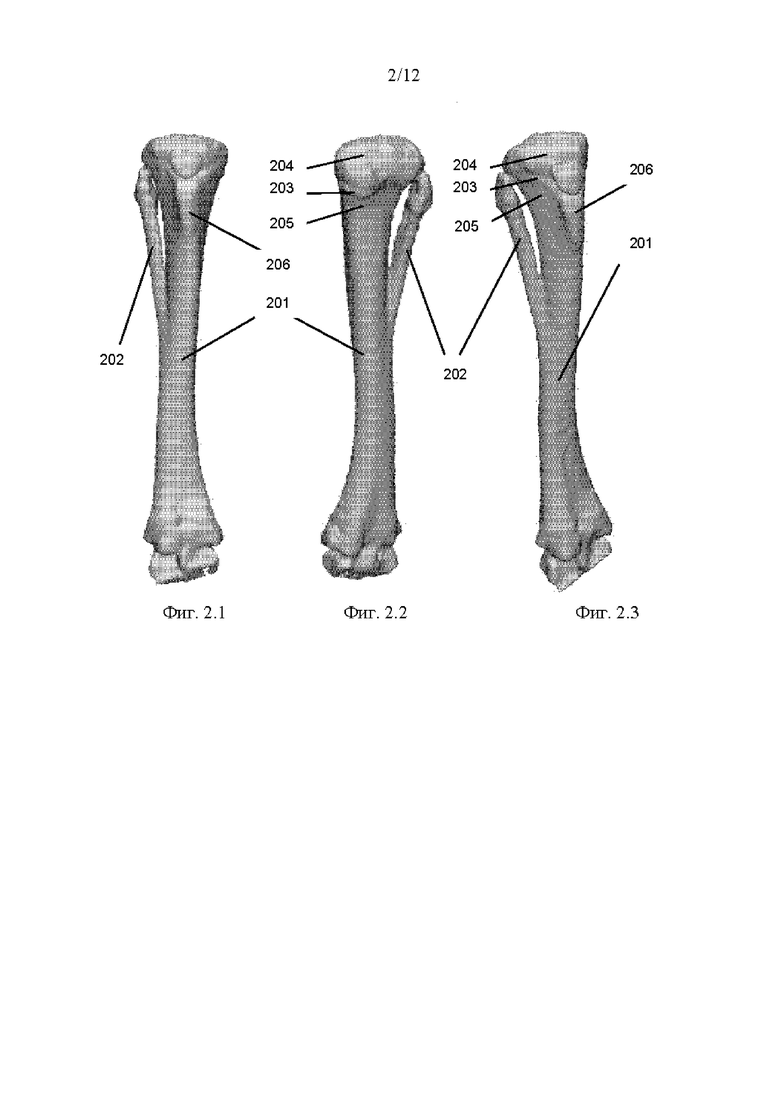
На Фиг. 2.1-2.3 приведены изображения 3D реконструкции костей правой голени кролика,
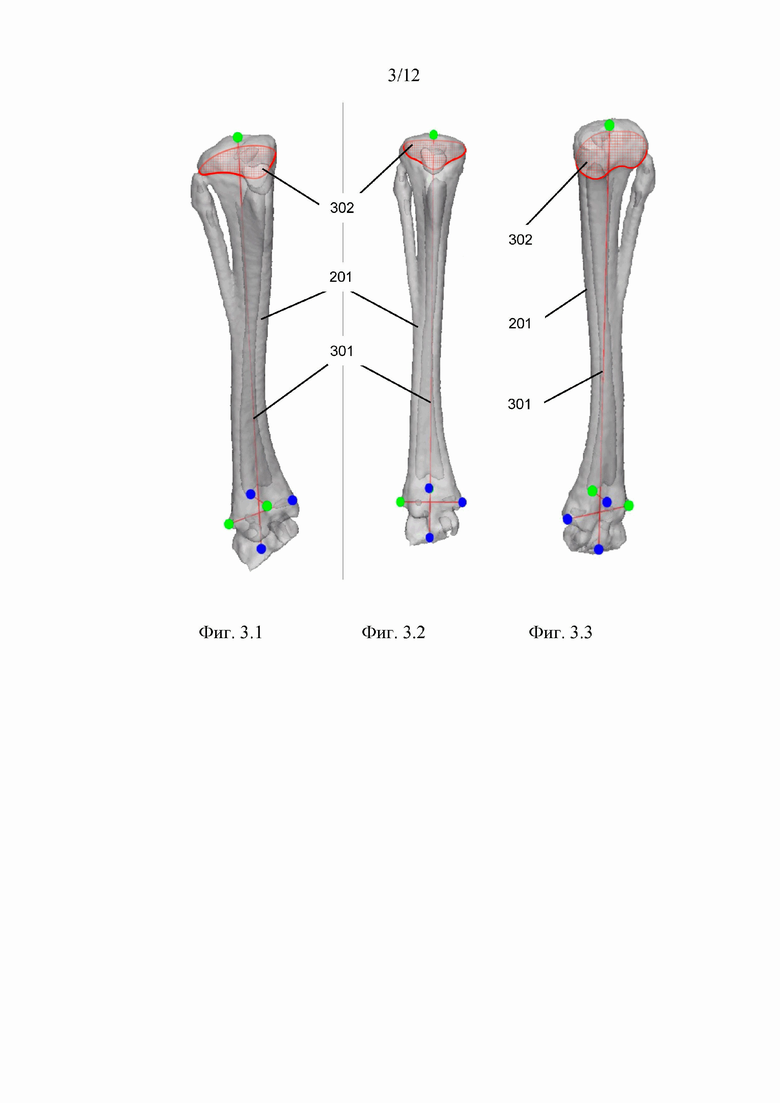
На Фиг. 3.1-3.3 изображения 3D реконструкции оперируемого сегмента,
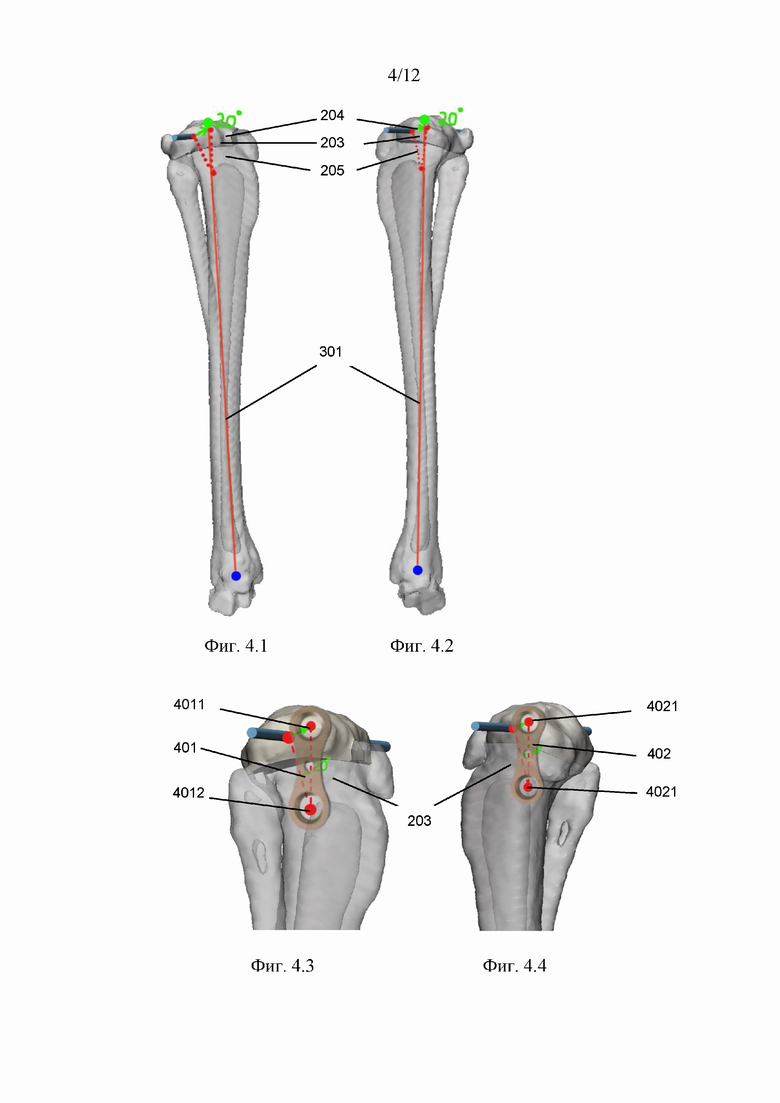
На Фиг. 4.1-4.4 показан поворот дистального фрагмента в горизонтальной плоскости на требуемый угол,
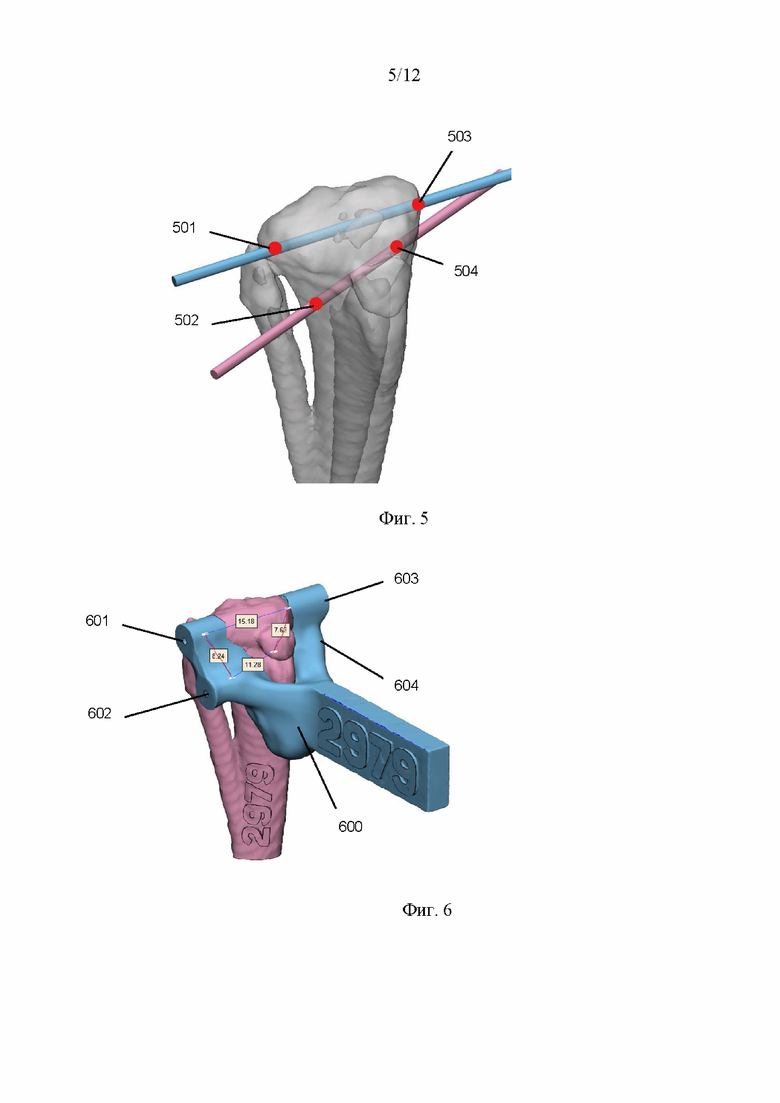
На Фиг. 5 показано изображение первоначальной трехмерной модели кости (до выполнения виртуального оперативного вмешательства) с сохраненными отверстиями для введения винтов и установки пластин. На Фиг. 6 показана трехмерная модель индивидуального шаблона-направителя с отверстиями для введения винтов.
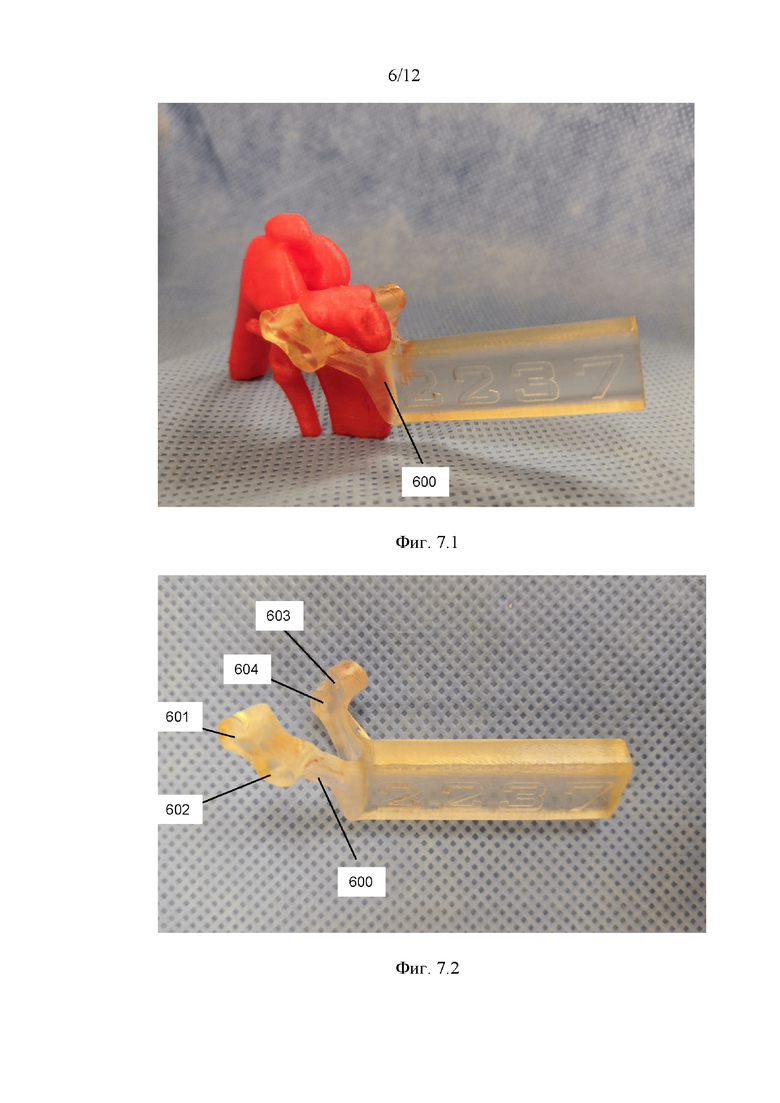
На Фиг. 7.1-7.2 показан индивидуальный шаблон-направитель.
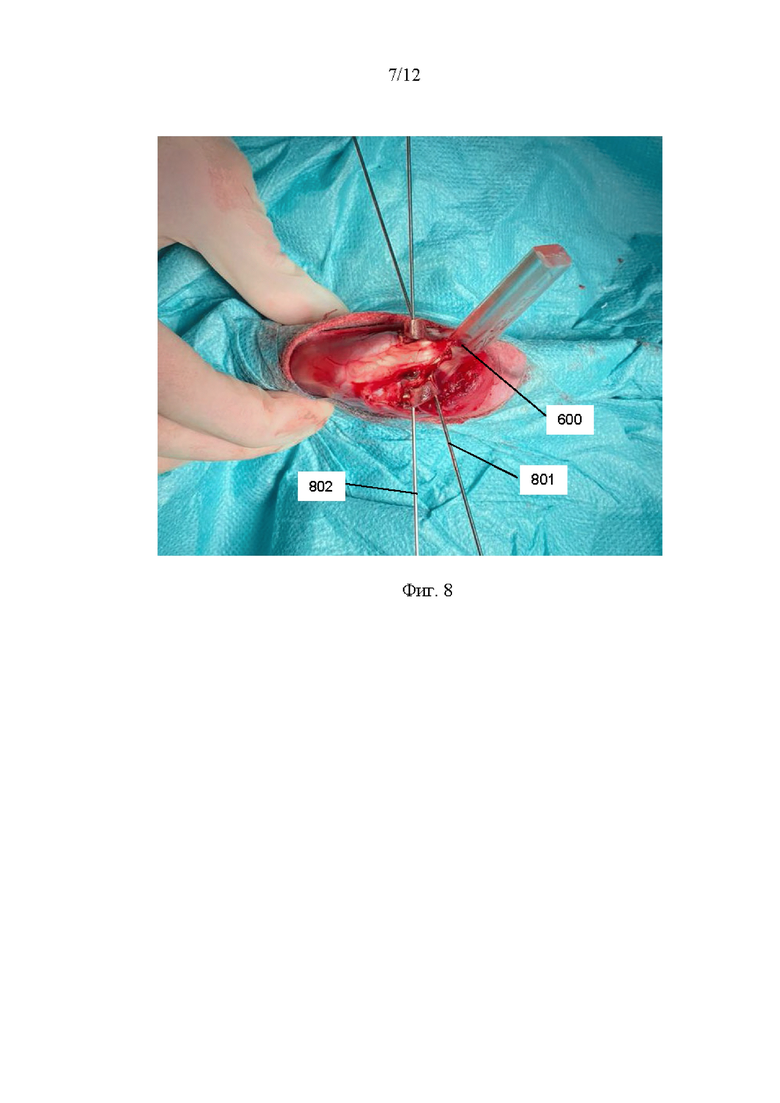
На Фиг. 8 показана установка шаблона-направителя.
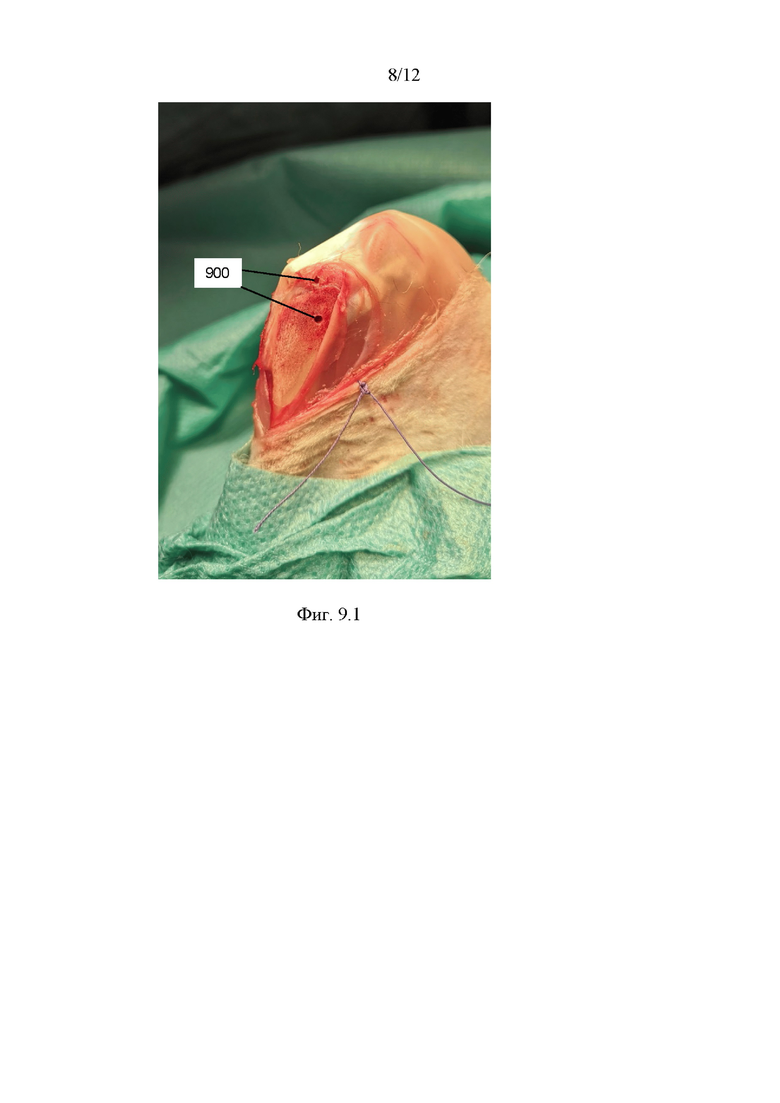
На Фиг. 9.1-9.2 показаны сформированные отверстия.
На Фиг. 10.1-10.3 показана установка пластин.
На Фиг. 11.1-11.2 приведен послеоперационный рентген контроль (сразу и через 10 недель после операции).
На Фиг. 12.1-12.2 приведена компьютерная томограмма задних конечностей кролика (через 10 недель после операции).
ОСУЩЕСТВЛЕНИЕ
Способ коррекции и моделирования торсионных деформаций длинных костей конечностей при функционирующих зонах роста у людей и животных реализуется на примере кролика породы «Советская шиншилла». Как будет понятно специалисту, строение конечностей и наличие зон роста характерно как для кролика, так и для человека.
В качестве иллюстративного примера приведен способ моделирования торсионной деформации кости кролика из «нормального» положения в деформированное, смещенное на заданный угол. Как будет понятно специалисту, аналогичным образом может быть проведена и обратная процедура коррекции из деформированного положения в «нормальное» аналогичным образом и с выполнением тех же этапов способа в той же последовательности. Оба варианта применения заявляемого способа могут быть актуальны на практике. Представленный иллюстративный пример приведен лишь для обеспечения лучшего понимания заявляемого способа и отдельных его этапов и не ограничивает объем правовой охраны заявляемого изобретения.
На первом этапе заявляемого способа выполняют компьютерную томографию конечности или сегмента конечности. Затем по полученной компьютерной томограмме измеряют исходную величину торсии кости, определяют величину необходимой коррекции или моделируемой деформации, с определением планируемой величины торсии.
В иллюстративном примере на Фиг. 1.1-1.2 показана компьютерная томограмма правой и левой голеней кролика. При этом, на правой голени величина торсии составляет 0,3 градуса кнаружи (Фиг. 1.1), а на левой голени величина торсии составляет 2,8 градусов кнутри (Фиг. 1.2).
По данным компьютерной томографии выполняют 3D реконструкцию сегмента конечности, подлежащего коррекции или моделируемой деформации, с получением его трехмерной модели.
В иллюстративном примере на Фиг. 2.1-2.3 с помощью компьютерной программы выполняют 3D реконструкцию оперируемого сегмента конечности (костей правой голени кролика).
На Фиг. 2.1-2.3 приведены изображения 3D реконструкции костей правой голени кролика, на которых: 201 - болынеберцовая кость; 202 -малоберцовая кость; 203 - проксимальная зона роста болыпеберцовой кости; 204 - эпифиз больше берцовой кости; 205 - метафиз болыпеберцовой кости; 206 - бугристость болыпеберцовой кости.
Далее выполняют следующие этапы: по полученной трехмерной модели определяют анатомическую ось кости;
на полученной трехмерной модели выполняют виртуальную поперечную остеотомию на уровне зоны роста с формированием двух фрагментов кости;
На Фиг. 3.1-3.3 в рамках иллюстративного примера на изображениях 3D реконструкции оперируемого сегмента показано построение анатомической оси 301 кости и поперечной виртуальной остеотомии 302 на уровне зоны роста кости. Иными словами: 301 - срединная ось болыпеберцовой кости, вокруг которой будет осуществляться поворот сегмента в горизонтальной плоскости; 302 - область виртуальной остеотомии, плоскость которой проходит через зону роста;
Таким образом, моделируют хирургическое вмешательство: виртуально производят остеотомию 3D модели кости, при этом плоскость остеотомии 302 проходит через зону роста (в приведенном иллюстративном примере - проксимальную зону роста болыпеберцовой кости).
Далее определяют ось 301 сегмента, проходящую через середины проксимальной и дистальной суставных поверхностей болыпеберцовой кости.
Следующим этапом на полученной трехмерной модели выполняют 3D-реконструкцию поворота одного фрагмента относительно другого вокруг анатомической оси кости на заданный угол из исходного положения в положение коррекции или деформации в соответствии с планируемой величиной торсии, с получением модели коррекции или деформации.
Согласно иллюстративному примеру на Фиг. 4.1 и 4.2 вокруг оси 301 виртуально выполняется поворот дистального фрагмента в горизонтальной плоскости на требуемый угол (в приведенном примере - 20 градусов кнаружи) в соответствии с желаемой величиной моделируемой деформации (или в соответствии с необходимой величиной коррекции имеющейся деформации).
Далее на полученной модели коррекции или деформации определяют положения для установки двух накостных пластин и четырех винтов, при этом пластины располагают параллельно друг другу и перпендикулярно зоне роста по латеральной и медиальной поверхностям кости, а винты, введенные в проксимальные отверстия пластины, располагают выше зоны роста, винты, введенные в дистальные отверстия пластины, располагают ниже зоны роста.
Данное положение накостных пластин определяют как конечное желаемое положение, которое будет достигнуто при завершении коррекции или деформации кости.
На представленном иллюстративном примере определяют положения 401 и 402 для накостных пластин и соответствующие положения 4011, 4012 и 4021, 4022 для винтов следующим образом. Две пластины устанавливают на виртуально корригированную кость по средней линии медиальной и латеральной поверхности метаэпифиза, параллельно друг другу. При этом проксимальный винт с каждой стороны располагается выше (положения 4011 и 4021), а дистальный винт - ниже (положения 4012 и 4022) области виртуальной остеотомии (зоны роста 203). Данное положение металлоконструкций (положения 401 и 402 накостных пластин и 4011, 4012, 4021, 4022 винтов) будет принято за конечное, достижение которого в процессе управляемого роста будет свидетельствовать о завершении коррекции.
Один фрагмент кости возвращают в исходное положение относительно другого фрагмента кости, при этом сохраняют ранее определенные места для введения винтов;
Таким образом производят "отмену" виртуально выполненного оперативного вмешательства (остеотомии через зону роста и моделирования или коррекции деформации), восстанавливается первоначальная форма кости, при этом положение отверстий 501, 502, 503, 504 для введения винтов сохраняется (Фиг. 5).
Фиг. 5 - изображение первоначальной трехмерной модели кости (до выполнения виртуального оперативного вмешательства) с сохраненными отверстиями 501, 502, 503, 504 для введения винтов.
Затем проектируют и формируют шаблон-направитель 600 с отверстиями 601, 602, 603, 604 под винты согласно положениям установки винтов на полученной модели коррекции или деформации. При этом отверстия 601, 602, 603, 604 на шаблоне 600 соосны отверстиям 501, 502, 503, 504 для введения винтов.
На Фиг. 6 представлена трехмерная модель спроектированного индивидуального шаблона-направителя 600 с отверстиями 601, 602, 603, 604, соответствующими запланированным местам введения винтов. При разработке шаблона-направителя 600 обеспечивается его соответствие достаточному количеству анатомических ориентиров и необходимая степень его прилегания к кости, что минимизирует возможность некорректной интраоперационной установки шаблона-направителя 600. Также на данном этапе выполняется определение размеров имплантируемых пластин и винтов из библиотеки имеющихся металлоконструкций.
Шаблон формируют методами 3D-моделирования и печати (распечатывают на 3D-принтере) и применяют во время операции. На Фиг. 7.1 и 7.2 приведен иллюстративный пример такого шаблона-направителя 600, сформированного методом 3D- печати, в котором выполнены отверстия 601, 602, 603, 604 для установки винтов.
Оперативное вмешательство заключается в следующем. В представленном неограничивающем иллюстративном примере выполняют дугообразный разрез кожи и мягких тканей длиной 4 см по передне-латеральной поверхности коленного сустава. Далее выполняют доступ к мыщелкам болыпеберцовой кости по медиальной и латеральной поверхностям с огибанием места прикрепления собственной связки надколенника.
Во время операции осуществляют временную установку шаблона-направителя 600 на кость с формированием отверстий в кости по упомянутому шаблону-направителю 600, то есть отверстий соосным отверстиям 601, 602, 603, 604 шаблона-направителя 600. На Фиг. 8 показана установка шаблона-направителя 600, по которому формируют четыре отверстия для введения винтов. На Фиг. 8 спицы 801 и 802 введены через соответствующие отверстия 601, 602, 603, 604 шаблона-направителя 600 в отверстия, выполненные в кости.
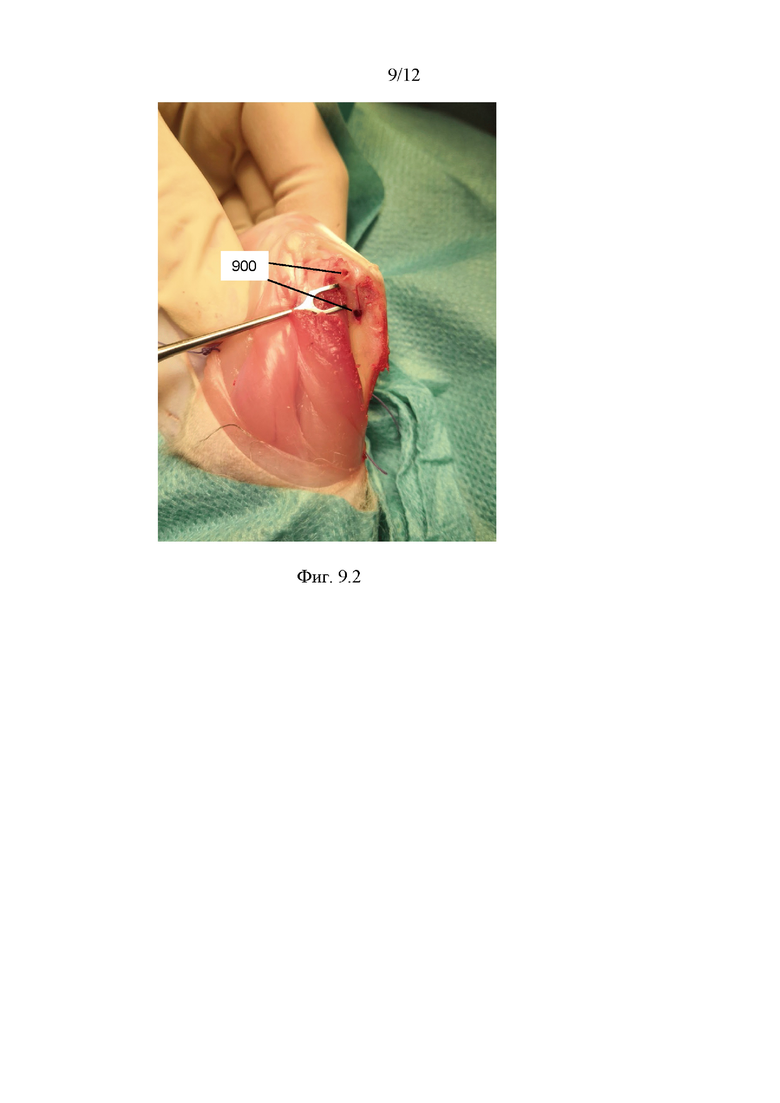
Извлекают шаблон-направитель 600 и осуществляют установку выбранных пластин и костных винтов в сформированные отверстия 900.
На Фиг. 9.1-9.2 показаны, сформированные на кости отверстия 900, выполненные с использованием шаблона-направителя 600. Отверстия 900 соответствуют отверстиям 501, 502, 503, 504 трехмерной модели, представленной на Фиг. 5.
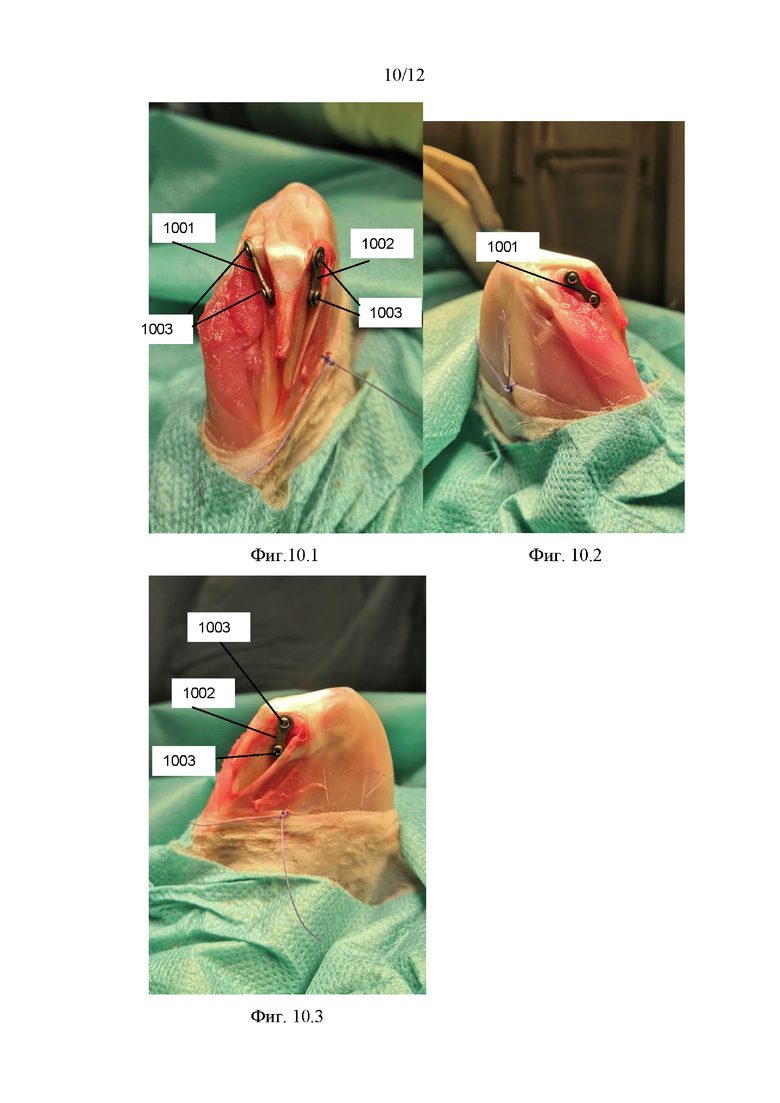
После удаления шаблона-направителя 600 устанавливают, две восьмиобразные пластины 1001 и 1002, которые фиксируют четырьмя винтами 1003, введенными в имеющиеся отверстия 900. На Фиг. 10.1-10.3 показана установка пластин 1001 и 1002 с четырьмя винтами 1003 согласно неограничивающему иллюстративному примеру.
Таким образом, пластины 1001 и 1002 располагаются косо по отношению друг к другу и к зоне роста под углом, соответствующим необходимой величине коррекции, что позволяет повысить ее точность.
В послеоперационном периоде по мере функционирования зоны роста и соответствующего продольного роста кости выполняют этапные контрольные рентгеновские снимки конечности, в ответ на достижение конечного желаемого положения коррекции и/или деформации, удаляют пластины 1001 и 1002 и винты 1003.
Выполняют регулярный рентгенологический контроль (рентгенография костей голени в боковой проекции). На финальной стадии перед извлечением металлоконструкций выполняют компьютерную томографию (КТ) конечности.
На Фиг. 11.1 приведен послеоперационный рентген контроль, где пластины 1001 и 1002 расположены под углом друг к другу, а на Фиг 11.2 -рентгенограмма через 10 недель после операции. На Фиг. 11.2 отображено параллельное расположение пластин 1001 и 1002, что является следствием продольного роста кости и торсионной деформации сегмента кости согласно предварительно заданному конечному желаемому положению.
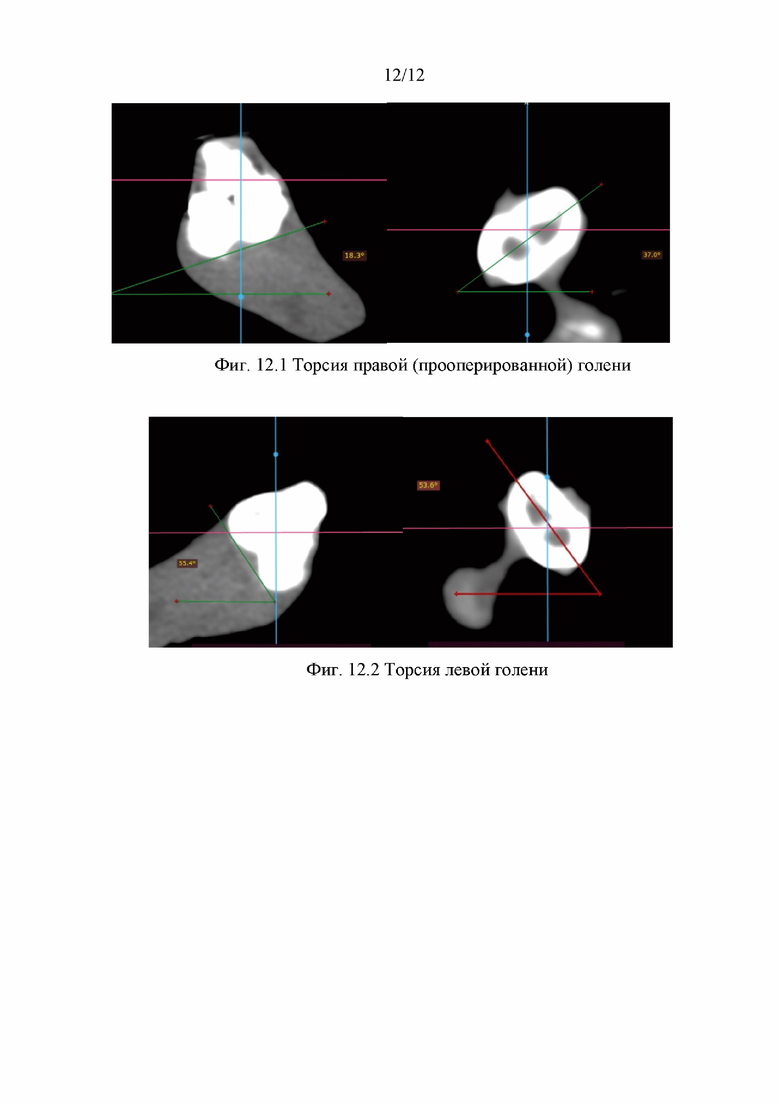
При визуализации запланированного (параллельного относительно друг друга) положения пластин 1001 и 1002 или остановке продольного роста кости выполняется контрольная компьютерная томография нижних конечностей, с использованием вышеупомянутой методики определяется величина торсии оперированного и неоперированного сегментов и точность коррекции. При подтверждении достижения необходимой величины коррекции металлоконструкции (пластины 1001, 1002 и винты 1003) удаляются. На Фиг. 12.1-12.2 приведена компьютерная томограмма задних конечностей кролика через 10 недель после операции, а именно правой и левой голеней того же кролика, для которого были приведены исходные снимки на Фиг. 1.1-1.2. При этом, на правой голени величина торсии составляет 18,7 градуса кнаружи (Фиг. 12.1), а на левой голени величина торсии составляет 1,8 градусов кнутри (Фиг. 12.2).
С учетом представленных результатов видно, что величина торсии относительно исходного положения составляет 18,4 градуса, а относительно не оперированной конечности - 20,5 градусов, что соответствует заданному значению и подтверждает достижение заявленного технического результата в способе.
Представленные иллюстративные варианты осуществления, примеры и описание служат лишь для обеспечения понимания заявляемого технического решения и не являются ограничивающими. Другие возможные варианты осуществления будут ясны специалисту из представленного описания. Объем настоящего изобретения ограничен лишь прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ планирования и выполнения коррекции деформаций длинных костей | 2016 |
|
RU2641840C2 |
| Способ лечения врожденных пороков бедренной кости, сопровождающихся укорочением, недоразвитием наружного мыщелка у растущих детей | 2018 |
|
RU2703191C1 |
| СПОСОБ ОПЕРАТИВНОГО ЛЕЧЕНИЯ ПАЦИЕНТОВ С ДЕФОРМАЦИЕЙ ПЕРЕДНЕГО ОТДЕЛА СТОПЫ | 2018 |
|
RU2708880C1 |
| УСТРОЙСТВО ДЛЯ ПЕРСОНИФИЦИРОВАННОГО ЛЕЧЕНИЯ ВАЛЬГУСНОЙ ДЕФОРМАЦИИ ПЕРВОГО ПАЛЬЦА СТОПЫ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2020 |
|
RU2741198C1 |
| Способ хирургического лечения консолидированных в положении смещения переломов пяточной кости с посттравматическими деформациями заднего отдела стопы | 2024 |
|
RU2829420C1 |
| Способ коррекции ригидной пронационной контрактуры суставов предплечья у детей со спастическим церебральным параличом | 2024 |
|
RU2831339C1 |
| Способ корригирующей остеотомии бедренной кости | 2016 |
|
RU2656018C2 |
| Способ трехмерного моделирования операции чрескостного остеосинтеза при переломах области голеностопного сустава | 2017 |
|
RU2683561C1 |
| Способ лечения варусной деформации коленного сустава и устройство для его осуществления | 1988 |
|
SU1600735A1 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ДЕФОРМАЦИЙ ПРОКСИМАЛЬНОГО ОТДЕЛА БЕДРА У ДЕТЕЙ | 2014 |
|
RU2570046C1 |

Изобретение относится к медицине, а именно хирургии, ортопедии и ветеринарии, может быть использовано при коррекции и моделировании торсионных деформаций длинных костей конечностей человека и животных при функционирующих зонах роста. Во время операции осуществляют временную установку шаблона-направителя на кость с формированием отверстий в кости по упомянутому шаблону-направителю. Извлекают шаблон-направитель и осуществляют установку выбранных пластин и костных винтов в сформированные отверстия. По мере функционирования зоны роста и продольного роста кости происходит коррекция или деформация кости во времени в соответствии с запланированной величиной торсии, а также изменение положения накостных пластин в соответствии с конечным желаемым положением. По мере функционирования зоны роста и соответствующего продольного роста кости выполняют этапные контрольные рентгеновские снимки конечности, в ответ на достижение конечного желаемого положения коррекции и/или деформации удаляют пластины и винты. Способ обеспечивает максимальную точность коррекции и моделирования торсионных деформаций длинных костей конечностей при функционирующих зонах роста с сохранением минимальной травматичности оперативного вмешательства за счет особенностей выполнения этапов коррекции. 12 ил.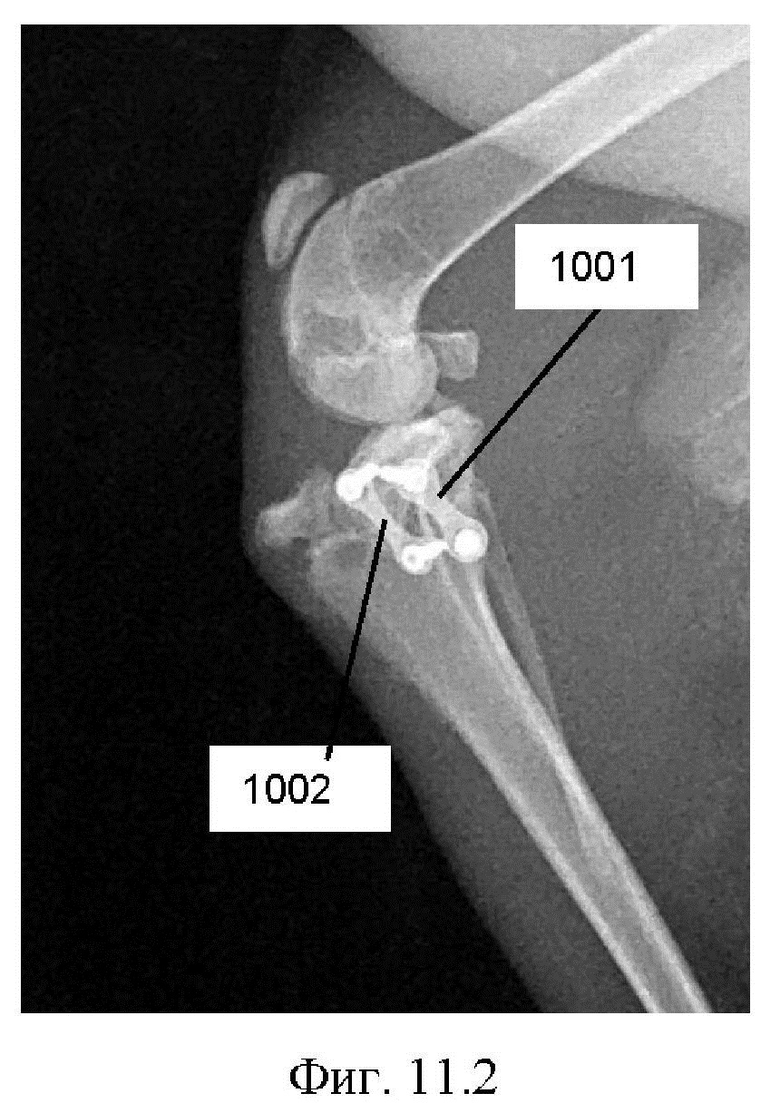
Способ коррекции и моделирования торсионных деформаций длинных костей конечностей при функционирующих зонах роста, в котором:
выполняют компьютерную томографию конечности или сегмента конечности,
по полученной компьютерной томограмме измеряют исходную величину торсии кости, определяют величину необходимой коррекции или моделируемой деформации, с определением планируемой величины торсии;
по данным компьютерной томографии выполняют 3D-реконструкцию сегмента конечности, подлежащего коррекции или моделируемой деформации, с получением его трехмерной модели;
по полученной трехмерной модели определяют анатомическую ось кости;
на полученной трехмерной модели выполняют виртуальную поперечную остеотомию на уровне зоны роста с формированием двух фрагментов кости;
на полученной трехмерной модели выполняют 3D-реконструкцию поворота одного фрагмента относительно другого вокруг анатомической оси кости на заданный угол из исходного положения в положение коррекции или деформации в соответствии с планируемой величиной торсии, с получением модели коррекции или деформации;
на полученной модели коррекции или деформации определяют положения для установки двух накостных пластин и четырех винтов, при этом пластины располагают параллельно друг другу и перпендикулярно зоне роста по латеральной и медиальной поверхностям кости, а винты, введенные в проксимальные отверстия пластины, располагают выше зоны роста, винты, введенные в дистальные отверстия пластины, располагают ниже зоны роста;
данное положение накостных пластин определяют как конечное желаемое положение, которое будет достигнуто при завершении коррекции или деформации кости;
один фрагмент кости возвращают в исходное положение относительно другого фрагмента кости, при этом сохраняют ранее определенные места для введения винтов;
формируют шаблон-направитель с отверстиями под винты согласно положениям установки винтов на полученной модели коррекции или деформации;
во время операции осуществляют временную установку шаблона-направителя на кость с формированием отверстий в кости по упомянутому шаблону-направителю;
извлекают шаблон-направитель и осуществляют установку выбранных пластин и костных винтов в сформированные отверстия;
по мере функционирования зоны роста и соответствующего продольного роста кости выполняют этапные контрольные рентгеновские снимки конечности, при достижении конечного желаемого положения коррекции и/или деформации пластины и винты удаляют.
| Arami A, Bar-On E, Herman A, Velkes S, Heller S | |||
| Guiding femoral rotational growth in an animal model | |||
| J Bone Joint Surg Am | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| СПОСОБ МОДЕЛИРОВАНИЯ КОРРЕКЦИИ НА РАННИХ СТАДИЯХ УГЛОВЫХ ДЕФОРМАЦИЙ КОЛЕННОГО СУСТАВА ПРИ ПОРАЖЕНИИ РОСТКОВОГО ХРЯЩА ТРУБЧАТЫХ КОСТЕЙ | 2007 |
|
RU2364951C1 |
| Способ планирования и выполнения коррекции деформаций длинных костей | 2016 |
|
RU2641840C2 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОГО ЗАКРЫВАНИЯ СЕМАФОРА ПРИ ОБРЫВЕ СЕМАФОРНЫХ ТЯГ | 1929 |
|
SU17352A1 |
| Abood AA, Hellfritzsch MB, Møller-Madsen B, Brüel A, Westersø TS, Vedel-Smith NK, Rahbek O, | |||

