ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области медицины, а именно - к протезированию, травматологии и ортезированию, может быть использовано в реабилитации пациентов после ампутации и протезирования нижних конечностей, адаптивном спорте.
ТРЕБОВАНИЕ ЕДИНСТВА ИЗОБРЕТЕНИЯ
Предлагаемое автором изобретение представляет собой группу изобретений: учебно-тренировочный комплекс маневренности на протезе, способ обучения и способ оценки маневренности, которые связаны между собой единым изобретательским замыслом, а именно:
• учебно-тренировочный комплекс маневренности на протезе представляет собой комплекс упражнений и техническое оснащение, используемые в процессе обучения базовым навыкам маневренности пациентов на протезе после ампутации и протезирования нижней конечности;
• способ обучения маневренности является способом осуществления учебно-тренировочного комплекса, основным результатом которого является достигнутый пациентом уровень маневренности на протезе;
• способ оценки маневренности предназначен для оценки уровня маневренности, и может быть использован до начала, в процессе и после осуществления учебно-тренировочного комплекса и способа обучения маневренности на протезе.
ТЕХНИЧЕСКАЯ ПРОБЛЕМА. УРОВЕНЬ ТЕХНИКИ
Известно, что причинами ампутации нижней конечности являются сердечно-сосудистые заболевания, диабет, онкология, инфекционные заболевания, в частности COVID-19; травмы, полученные в быту и на производстве, в результате транспортных происшествий, стихийных бедствий и катастроф; ранений, полученных в зоне боевых действий.
Известно также, что усечение нижней конечности сопровождается утратой опороспособности и возможности осуществлять самостоятельную ходьбу, выполнять многие привычные для человека действия, движения (локомоции) при решении бытовых задач, выполнении трудовых функций, в спорте и других видах повседневной деятельности.
С момента ампутации до протезирования может пройти от нескольких недель до нескольких лет. Перемещение в инвалидной коляске в течение длительного периода времени, ограничение физической активности способствуют развитию атрофии мышц и контрактуры в сохранных суставах нижних конечностей.
Известно, что при усечении ноги на уровне голени развивается контрактура сгибательных мышц коленного сустава, на уровне бедра - сгибательных, отводящих мышц и ротации кнаружи тазобедренного сустава и их сочетание. Может развиваться сгибательная контрактура мышц коленного и тазобедренного сустава сохранной ноги.
Кроме того известно, что отсутствие опоры усеченной конечности ведет к атрофии сохранных мышц, участвующих в осуществлении основных видов движения: в коленном суставе - сгибание и разгибание, в тазобедренном суставе - сгибание и разгибание, отведение и приведение, ротация кнаружи и кнутри.
Известно, что при обучении ходьбе на протезе на протезных предприятиях не уделяется должного внимания комплексному подходу к восстановлению нарушенных физических качеств: силы, быстроты, выносливости, гибкости, ловкости, и скоростно-силовых и координационных способностей.
Ампутация нижней конечности ведет также к социальной изолированности, зависимости от окружающих людей, отказу от занятий видами спорта или досуга, которыми пациент занимался до усечения ноги.
Известно, что усечение нижней конечности сопровождается возникновением психологических проблем: посттравматические стрессовые расстройства после перенесенных травм и ранений; страхи, прежде всего страх падения; сомнения: «смогу ли я сделать то, что делал раньше»; неуверенность в себе, восприятие себя неполноценным, ущербным человеком. Психологические проблемы пациентов усиливаются от сочувственных взглядов окружающих людей, от проявления их желания «помочь» в ситуациях, с которыми человек с усеченной конечностью способен справиться сам: самостоятельно встать после падения или поднять предмет, который уронил; при решении бытовых и иных задач.
Основным методом компенсации утраченной функции ходьбы является протезирование и обучение ходьбе на протезе нижней конечности.
В практике многих протезных предприятий обучение ходьбе на протезе ограничивается пробными шагами с ходунками или в брусьях на этапе примерки и выдачи протеза, что в дальнейшем ведет либо к отказу от ходьбы на протезе и передвижению на инвалидной коляске, либо к формированию патологического стереотипа ходьбы с использованием костылей, нарушению ритмичности ходьбы, опорно-двигательного аппарата, в частности к нарушению осанки [2].
Обучение ходьбе на протезе зачастую сводится к овладению навыками циклических видов движений. Однако в повседневной жизни человек при выполнении повседневных двигательных задач совершает не только циклические, но и ациклические и смешанные движения (локомоции): различные сложно-координационные движения; выполняет разнонаправленные перемещения на ногах, которые обеспечиваются основными видами движений в суставах: сгибанием и разгибанием коленного и тазобедренного сустава, отведением и приведением, ротацией кнаружи и кнутри бедра, в сочетании с поворотами, наклонами и положениями корпуса в разных плоскостях, движениями рук и головы.
Известно, что одной из эффективных методик восстановления функции ходьбы при таких патологиях как ДЦП, инсульт, болезнь Паркинсона, рассеянный склероз, спинальных больных является реверсивная ходьба (то же, что и обратная ходьба или спиной вперед, или ходьба задом наперед) [3]. По данным научных исследований применение методики реверсивной ходьбы в медицине, в том числе в реабилитации, и в спорте позволяет комплексно решать следующие задачи [3, 4, 5]:
• устранение атрофии мышц, улучшение осанки за счет укрепления мышц спины, ягодиц и нижних конечностей;
• устранение сгибательной контрактуры за счет укрепления разгибателей коленного сустава, а именно четырехглавой мышцы бедра;
• улучшение координации, устойчивости, баланса и равновесия; улучшение походки вперед после ходьбы назад, выработки правильного паттерна ходьбы, улучшение пространственно-временных параметров ходьбы за счет тренировки вестибулярного аппарата, отвечающего за обеспечение прямохождения, равновесие и координацию при ходьбе, синхронизацию одновременной работы сотни мышц и связок, сбалансированное перемещение тела на двух точках опоры; а также за счет реализации более высоких требований по сравнению с обычной ходьбой к координации между зрительной, вестибулярной (ощущениями, связанными с такими движениями, как поворот, вращение или быстрое движение) и проприоцептивной (осознанием того, где наше тело находится в пространстве) системами;
• развитие таких физических качеств как сила, быстрота и выносливость за счет более существенной нагрузки на сердечно-сосудистую и дыхательную системы; более значительного повышения как аэробных, так и анаэробных возможностей организма; увеличения скорости потребления кислорода и повышения частоты сердечных сокращений; а также за счет более коротких и частых шагов, влияющих на увеличение мышечной силы и выносливости нижних конечностей, что в свою очередь ведет к улучшению спортивных результатов.
Из существующего уровня техники известен аналог [2], включающий упражнения по овладению навыками видов ходьбы: ходьба приставным шагом, боковым шагом; на 4 и 2 движения (шага); по лестнице; ходьба на выносливость по ровной поверхности в темпе, привычном для пациента; способами ходьбы: ходьба вперед (то же, что прямая ходьба или обычная ходьба, или вперед лицом); комбинации видов ходьбы вперед и назад и способов ходьбы: движение в одну сторону вперед лицом, в обратную - вперед спиной; ходьба по разному грунту; подъем и спуск по лестнице и горке; повороты при освоении техники скандинавской ходьбы с использованием технических средств реабилитации (ТСР): ходунки, костыли, трости.
Аналог использует комплекс упражнений, направленный на увеличение объема движения в сохранных суставах, координацию движений и равновесие, укрепление мышечно-связочного аппарата, разработку и профилактику контрактуры, общую силовую выносливость с применением эспандеров и спортинвентаря и без них. Таким образом, решаются задачи устранения атрофии мышц, а также восстановление нарушенных физических качеств: сила, выносливость, гибкость, ловкость.
Аналог также предусматривает решение задач бытовой адаптации путем перемещения по жилому помещению с применением ТСР и освоения бытовых навыков без посторонней помощи.
Психологическую коррекцию проводят путем постепенного освоения навыков ходьбы, игровых и спортивных элементов занятий, освоения алгоритма ситуативных задач, с которыми пациент не справился ранее.
Недостатками данного технического решения являются:
• недостаточность понимания решения проблемы устранения атрофии мышц из-за отсутствия описания упражнений: на какие мышечные группы производится силовое воздействие;
• недостаточность понимания решения проблемы устранения контрактуры сохранных суставов нижних конечностей из-за отсутствия описания упражнений: на какие мышечные группы, каким способом производится воздействие с целью устранения, как отдельных видов контрактуры, так и их сочетаний;
• отсутствие способа осуществления (а именно: в каком сочетании видов и способов ходьбы, в какой последовательности, при каких условиях) комбинаций видов ходьбы вперед и назад и способов ходьбы: вперед лицом и вперед спиной;
• недостаточность понимания из-за отсутствия описания упражнений, какие двигательные задачи решаются применением игровых и спортивных элементов занятий, не рассмотрен способ их осуществления: в каком положении они используются: «сидя», «стоя», в ходьбе; если в ходьбе, то по какой траектории осуществляется движение: по прямой линии или, например, с обходом препятствий; какое количество верхних и нижних конечностей вовлечено в выполнение упражнений; какими способами ходьбы выполняются поставленные задачи;
• отсутствие комплексного решения задачи адаптации пациентов к повседневной жизни: техническое решение ограничивается осуществлением двигательных задач только в одной сфере деятельности - бытовой;
• отсутствие комплексного решения задачи психологической коррекции пациента: задача решается в конкретных частных случаях, с которыми пациент не смог самостоятельно справиться, либо выполнение которых вызвало у него страх и сомнения, путем отработки алгоритма действий в частных случаях.
Известны аналоги, осуществляющие обучение ходьбе на протезе при первичном протезировании по методикам продолжительностью от нескольких дней до нескольких недель при освоении протеза голени и от нескольких недель до нескольких месяцев при освоении протеза бедра.
Недостатком данных технических решений является длительный срок реабилитации пациентов, перенесших ампутацию нижней конечности.
Наиболее близким к заявленному техническому решению [6] (прототип 1) является комплекс упражнений, включающий формирование навыка переноса веса тела боковыми шагами вправо и влево, при ходьбе вперед - на правую и левую ногу; виды ходьбы: на 4 и 2 шага прямым способом; виды шагов: диагональные шаги, перекрестные шаги, шаги вперед и назад; ходьбу по лестнице: вверх с сохранной ноги и вниз с протеза, попеременным шагом вверх и вниз; ходьбу по горке (пандусу) с наклонной плоскостью: приставными боковыми шагами (вверх с сохранной ноги, вниз с протеза); повороты направо и налево на 90° на 4 шага; траектории ходьбы: прямая линия, «змейкой»; используемые ТСР: параллельные брусья, подлокотные костыли, трости.
Упражнения ходьбы на 4 и 2 шага направлены на укрепление мышц спины, поясницы, ягодиц и разгибателей сохранной ноги.
На протезе голени и при наличии функции подкосоустойчивости коленного модуля протеза бедра подъем и спуск по лестнице и пандусу производят попеременным шагом.
Прототип 1 предусматривает комплекс упражнений в положении «лежа» на спине и животе, направленных на профилактику сгибательной контрактуры тазобедренного сустава путем укрепления разгибателей бедра и ротации бедра кнаружи путем выполнения упражнения на ротацию культи кнутри; на устранение атрофии мышц и укрепление мышц: спины - стабилизатора позвоночника, таза, ягодиц, здоровой и оперированной ног, брюшного пресса, мышц, ротирующих бедро сохранной ноги кнаружи и кнутри, отводящих мышц культи с использованием эластичной ленты.
Прототип 1 включает комплекс упражнений, направленных на тренировку вестибулярного аппарата, развитие координационных способностей: координации, равновесия и баланса; силы: укрепление мышц спины, плечевого пояса; улучшение осанки; двигательной ловкости, точности движений; ритмичности ходьбы, тренировку ощущения тела в пространстве (проприоцептивной чувствительности), в частности:
• на балансировочной платформе во фронтальной плоскости с использованием спортинвентаря: мячей, эластичной ленты, и без него;
• обход препятствий слева и справа по траектории «змейкой» с освоением навыка поворотов по кругу направо и налево путем увеличения длины шага ногой при удалении от центра поворота и уменьшения длины шага ноги ближе к центру поворота;
• танцевальные шаги под музыкальный ритм: боковые приставные шаги на укрепление отводящих мышц бедра; перекрестные шаги с переносом веса тела на 4 счета на укрепление приводящих мышц бедра; комбинации шагов: диагональных и прямых шагов вперед и назад, боковых приставных и перекрестных шагов без переноса веса тела.
Далее в целях психологической коррекции, направленной на преодоление страха и неловкости, обретения уверенности в управлении протезом, обучают танцам:
• сиртаки с усилением приводящих мышц левой ноги с использованием веса тела за счет переноса его при перекрестном шаге вперед и назад на левую ногу при движении лицом в круг против часовой стрелки и спиной в круг по часовой стрелке;
• вальсу, включающему чередование шагов вперед и назад с поворотом на угол менее 90° на 3 счета по часовой стрелке, на 180° - путем прокручивания на носке сохранной ноги при поддержке партнера по танцу.
Обучение пациентов ходьбе на протезе проводится в очной форме по месту нахождения протезного предприятия, программой обучения предусмотрено 15 очных занятий с пациентами.
Недостатками данного технического решения являются:
• ограниченная доступность к обучению ходьбе на протезе из-за использования в процессе обучения параллельных брусьев, имеющихся, как правило, в распоряжении специализированных лечебных и реабилитационных учреждений, протезных мастерских и предприятий, т.е. по месту нахождения указанных учреждений, в частности: для одиноких, пожилых, проживающих в сельской местности пациентов;
• ограниченная доступность к выполнению упражнений на балансировочной платформе на развитие равновесия и координации, в частности: для лиц пожилого возраста;
• профилактика контрактуры ограничена случаями: сгибательной контрактуры тазобедренного сустава, и ротации культи бедра кнаружи, не решается комплексно;
• комплекс упражнений направлен на восстановление отдельных физических качеств и способностей: сила, гибкость, ловкость и координационные способности, не решается комплексно:
• несбалансированное силовое воздействие в танце сиртаки в варианте исполнения прототипом 1 перекрестных шагов на приводящие мышцы бедра левой и правой ноги, а именно: силовое воздействие с использованием веса тела при его переносе с одной ноги на другую осуществляется только на приводящие мышцы левой ноги, что может оказывать влияние на качество ходьбы;
• устранение отводящей контрактуры бедра за счет укрепления приводящих мышц путем исполнения танца сиртаки решается не в полной мере: только при ампутации левой ноги и не решается при усечении правой ноги;
• разворот на 180° при исполнении вальса не осуществляется пациентом самостоятельно, а лишь при поддержке другого человека; кроме того производится путем прокручивания на носке сохранной ноги, что может быть травмоопасным на скользкой поверхности и может привести к возникновению риска падения.
Известны аналоги, которые в качестве критериев оценки освоения самостоятельной ходьбы на протезе рассматривают способность пройти на протезе без отдыха 1-2 км без выраженных признаков утомления и каких-либо изменений со стороны культи» [7] или способность совершать равномерные шаги по гладкой поверхности в течение 25-30 минут при темпе 50 шагов в 1 минуту [8].
Недостатком данных технических решений является то, что темп ходьбы и пройденное расстояние в качестве характеристик циклических видов движения не отражают в полной мере степень адаптации человека с усеченной конечностью к решению двигательных задач в повседневной жизни, включающих также ациклические и смешанные виды движений. Данные показатели не актуальны, например, при решении бытовых двигательных задач в жилом помещении.
В качестве прототипа (прототип 2) изобретения выбран способ комплексной оценки результатов реабилитационных мероприятий у пациентов с ампутационными культями бедра после протезирования [1], включающий оценку по 16-ти критериям: уровень ампутации бедра; наличие болезней культи: трофическая язва, неврома, остеофит, венозный застой, потертость; выраженность контрактуры тазобедренного сустава; угол шага; нагрузка на поверхность; способность самостоятельно надеть протез; использование при ходьбе дополнительных средств опоры; пройденное расстояние по плоской поверхности 0-1 км; изменение направления самостоятельной ходьбы на протезе как способность передвигаться с посторонней помощью или без нее; способность преодолевать одиночные ступеньки, бордюры и небольшие неровности; ходьба по лестнице; управляемость протеза; оценка жизненной активности: от безразличия и упадка сил до бодрости и энергичности; социальное функционирование: ограничение или доступность к общению с другими людьми; оценка боязни выхода из дома в окружающую среду: от панического страха до отсутствия психологических переживаний; личностная оценка общего состояния здоровья. Каждый критерий оценивают по 5-тибальной системе, где 1 балл - максимально возможный неудовлетворительный результат, а 5 баллов - максимально возможный положительный результат. Далее общую оценку определяют как среднюю от полученных оценок по всем показателям.
Недостатками данного технического решения являются:
• используемые в оценке критерии не отвечают в полной мере задачам адаптации пациента к выполнению двигательных задач в разных сферах повседневной деятельности: оцениваются лишь отдельные функциональные и социально-психологические возможности пациента; используемые критерии не ориентированы на конечный результат, т.е. на способность пациентом решать повседневные двигательные задачи;
• процесс сбора исходной информации для проведения комплексной оценки является громоздким и трудоемким, требующим привлечения медицинского персонала и специалистов разного профиля;
• необходимость использования для оценки ряда показателей специального измерительного оборудования и инструментов, имеющихся в распоряжении специализированных лечебных и реабилитационных учреждений, ограничивает широкое использование данного технического решения;
• один из критериев оценки является неинформативным в динамике - уровень ампутации бедра, который остается неизменным и не зависит от проведения каких-либо реабилитационных мероприятий.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачами технического решения изобретения являются:
• разработка учебно-тренировочного комплекса и способа его осуществления, направленных на формирование базовых навыков маневренности на протезе нижней конечности, позволяющих адаптировать пациентов к решению повседневных двигательных задач;
• разработка способа оценки уровня маневренности.
Под «маневренностью на протезе» понимается осуществление лицами после ампутации и протезирования нижней конечности разнонаправленных циклических, ациклических и смешанных движений (локомоций) для выполнения повседневных двигательных задач с вовлечением нижних конечностей в сочетании с движениями корпуса, головы и одной или двух верхних конечностей. Под «разнонаправленными движениями» понимаются шаги в разных направлениях: вперед, назад, диагональные, боковые, приставные, перекрестные и их комбинации.
При разработке технического решения изобретения учтено следующее:
1. В повседневной жизни любое перемещение на ногах, например, ходьба, повороты, отдельные шаги, подход к чему-либо или к кому-либо завершается приставным шагом, поэтому в учебно-тренировочный комплекс включены упражнения по освоению навыка ходьбы приставным шагом, выполняемые разными способами ходьбы.
2. Ходьба приставным шагом в условиях мышечной атрофии позволит в более щадящем режиме давать нагрузку на ведущую ногу, осуществляющую продвижение тела вперед, разгружая ее переносом веса тела на приставляемую ногу.
3. Учтена реабилитационная эффективность методики реверсивной ходьбы при восстановлении нарушенной функции ходьбы при разных патологиях.
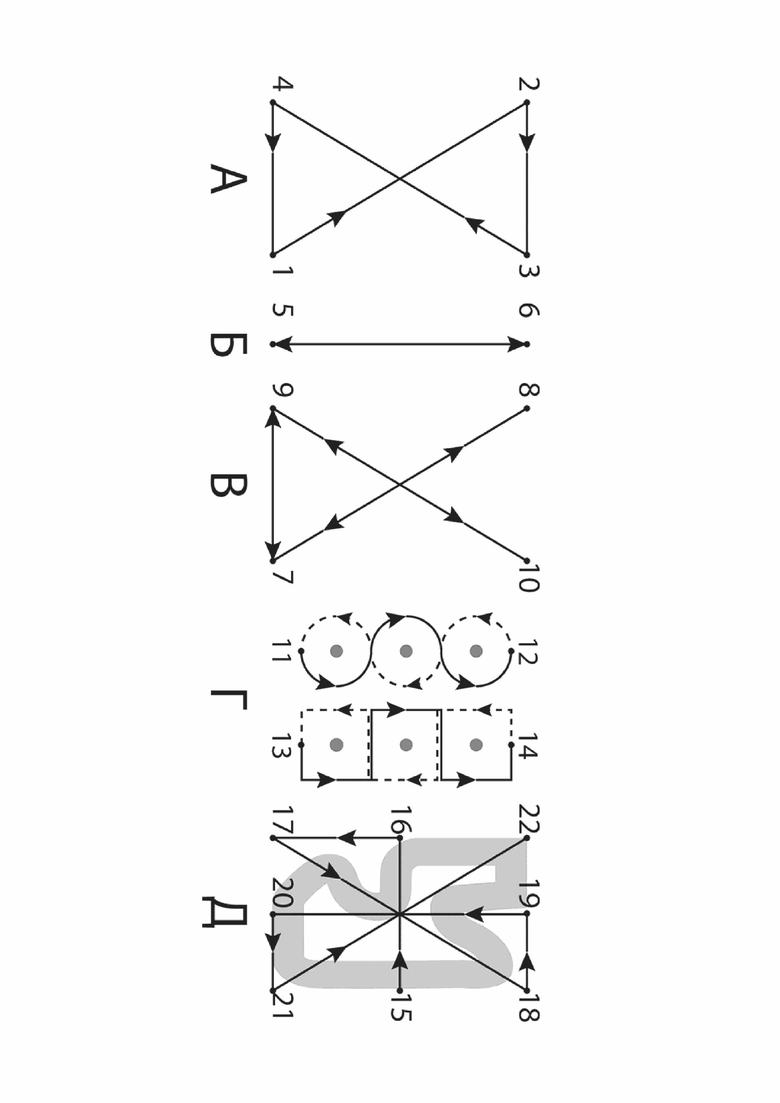
Техническое решение изобретения включает учебно-тренировочный комплекс маневренности на протезе, в состав которого входят: комплексы упражнений, направленные на формирование базовых навыков маневренности на протезе нижней конечности; техническое оснащение: учебные площадки в помещении и на улице длиной 3-8 м и шириной 1,5-4 м с траекториями движения разной конфигурации, используемыми в качестве основы учебно-тренировочных комплексов упражнений (Фиг. А, Б, В, Г, Д); полигон ходьбы общей площадью 700-1000 м2; оборудование: лестницы и горки с наклонной плоскостью; ТСР: ходунки, костыли и трости; инвентарь: футбольный, гимнастический и теннисные мячи, конусы, гибкие тарелка и стакан; учебные видеоматериалы для самостоятельных занятий по освоению техники и навыков маневренности на протезе.
Формирование базовых навыков маневренности на протезе нижней конечности производится в следующей последовательности комплексов упражнений: по обучению технике и навыкам переноса веса тела с одной ноги на другую вправо и влево, вперед и назад и равномерному распределению веса тела на обе ноги; видов ходьбы: ходьбы приставным шагом с сохранной ноги, затем с протезированной ноги, ходьбы на 4 и 2 шага в сочетании с поворотами направо и налево с углом поворота в диапазоне 27-63°; ходьбы перекрестным шагом; подъема и спуска по лестнице и горке с наклонной плоскостью; поворотов на 90°, 180°, 360° в правую и в левую стороны; ходьбы в природных условиях по разному грунту, в том числе со сменой грунта, в комбинации с преодолением препятствий; подъема и спуска по лестнице, горкам, в том числе по земляному пригорку; выполнения двигательных задач на взаимодействие двух ног с постепенным включением одной и двух рук.
Способ обучения маневренности осуществляют путем обучения комплексам упражнений, формирующим навыки маневренности на протезе: разнонаправленных перемещений на нижних конечностях и решения двигательных задач во взаимодействии ног и рук в следующей последовательности:
[01] обучают переносу веса тела с ноги на ногу вправо и влево по 2 раза на каждую ногу, продолжительностью по 3-5 сек, затем равномерно распределяют вес тела на обе ноги, далее одну ногу ставят вперед и переносят вес тела с одной ноги на другую вперед и назад, далее то же после смены позиции ног; выполняют комплекс упражнений при условии прямой постановки корпуса, исключающей наклоны во фронтальной и саггитальной плоскостях, ротацию корпуса со стороны усеченной конечности, наклон головы вперед;
[02] обучают технике видов ходьбы в последовательности: ходьба приставным шагом сначала с сохранной ноги, после с протезированной ноги; ходьба на 4 шага: поочередно шаг костылем, затем - противоположной ногой, далее - вторым костылем, после - второй ногой; на 2 шага: поочередно синхронно шаг парой костыль и противоположная нога, затем - второй парой; выполняют способами ходьбы в последовательности: прямая и реверсивная ходьба, повороты направо и налево;
[03] используют траекторию движения, состоящую из двух диагоналей, соединенных между собой двумя параллельными сторонами учебной площадки (Фиг. А: 1-2-3-4-1); формируют навык разными видами ходьбы в их комбинации последовательно: приставным шагом с сохранной ноги, то же с протезированной ноги, ходьбы на 4 и 2 шага; каждый вид ходьбы выполняют путем чередования способов ходьбы: прямой ходьбы с двумя поворотами направо и двумя поворотами налево с углом поворота в диапазоне 27-63°; включают в тренировочный цикл 4 последовательных прохода каждым видом ходьбы с постепенным переводом пациентов с использования 2-х костылей на 2 трости, далее на 1 трость, и ходьбу без использования ТСР;
[04] используют траекторию движения в виде прямой линии учебной площадки; выполняют комбинации видов ходьбы: приставным шагом с сохранной ноги, то же с протезированной ноги, ходьбы на 4 и 2 шага, - путем чередования прямой и реверсивной ходьбы при условии, что прямой ходьбой осуществляют проход одним видом ходьбы, реверсивной - другим видом ходьбы, используя все четыре вида ходьбы двумя способами, начиная прямую ходьбу с ТСР, а реверсивную - с ноги или с протеза с небольшим наклоном корпуса вперед, укрепляя сгибатели и разгибатели сохранных коленных и тазобедренных суставов с использованием веса тела при переносе его с одной ноги на другую (Фиг. Б: 5-6);
[05] используют траекторию движения, состоящую из двух диагональный линий, соединенных одной стороной учебной площадки; обучают технике перекрестного шага вперед и назад правой и левой ногой, укрепляя приводящие за счет перекрестного шага и отводящие мышцы бедра за счет постановки приставляемой ноги шире ширины таза с использованием веса тела при переносе его с одной ноги на другую путем чередования диагональных вперед и назад и боковых перекрестных вправо и влево шагов (Фиг. В: 7-8-7-9-10-9-7).
Способ обучения технике ходьбы перекрестным шагом осуществляют, начиная с сохранной ноги с диагональных перекрестных шагов. Если сохранная нога правая, то движение начинают с правой диагонали, если левая нога, то с левой. При движении по диагонали вперед справа налево перекрестный шаг производят правой ногой вперед, вторую ногу приставляют (Фиг. В: 7-8). Затем при движении по той же диагонали назад слева направо перекрестный шаг производят левой ногой назад, вторую ногу приставляют (Фиг. В: 8-7). Далее при движении влево правой ногой производят перекрестные шаги попеременно вперед и назад, левую ногу приставляют (Фиг. В: 7-9). После этого движение производят по второй диагонали учебной площадки вперед слева направо перекрестным шагом левой ногой вперед и назад по диагонали справа налево - перекрестным шагом правой ноги назад (Фиг. В: 9-10-9). Завершают тренировку ходьбой вправо перекрестным шагом левой ноги попеременно вперед и назад (Фиг. В: 9-7).
При движении по диагоналям, вправо и влево учебной площадки положение корпуса тела пациента ориентируют постоянно на одну сторону;
[06] обучают технике ходьбы по лестнице: подъем с сохранной ноги и спуск с протезированной ноги прямым, затем по узким ступенькам под углом 45° приставным шагом; подъем и спуск на каждую ступеньку попеременным шагом при условии ходьбы на протезе голени или протезе бедра с функцией подкосоустойчивости с опорой одной рукой на поручень, другой - на ТСР: костыль, трость или без них; по наклонной поверхности горки: подъем боковыми приставными шагами с сохранной ноги, спуск - с протезированной, с опорой руками на поручень горки или без опоры;
[07] обучают технике поворотов на 90°, 180°, 360° направо и налево, способствующей укреплению мышц, ротирующих бедро кнаружи и кнутри с использованием веса тела при переносе его с одной ноги на другую а также поворотам в комбинации с прямой и реверсивной ходьбой, с шагами вперед и назад, боковыми приставными шагами вправо и влево, выполняют повороты как с сохранной, так и с протезированной ноги, в следующей последовательности:
• Поворот на 90° производят в 3 шага:
Вариант 1: Поворот направо осуществляют с шага правой ноги вперед с разворотом стопы наружу под углом 45° (шаг 1), далее производят поворот корпуса вправо на правой ноге с постановкой левой ноги на 90° (шаг 2), затем приставляют правую ногу (шаг 3). Поворот налево производят зеркально, начиная с шага левой ноги.
Вариант 2: Поворот направо осуществляют с прямого шага назад левой ноги (шаг 1), далее на левой ноге производят поворот корпуса вправо на 45° с постановкой правой ноги с разворотом стопы наружу под углом 45° таким образом, что стопы правой и левой ноги образуют угол 90° (шаг 2), затем приставляют левую ногу с поворотом корпуса вправо еще на 45° (шаг 3). Поворот налево производят зеркально, начиная с прямого шага назад правой ноги.
• Поворот на 180° производят следующим образом:
Вариант 3: повороты направо на 90° вариантами 1 и 2 позволяют произвести поворот на 180°; аналогичным образом осуществляют повороты налево.
Вариант 4: поворот на 180° выполняют на 4 шага. Поворот на 180° направо осуществляют с шага правой ноги вперед с разворотом стопы наружу под углом 45° (шаг 1), далее производят поворот корпуса вправо на правой ноге с постановкой левой ноги на 90° (шаг 2), затем на левой ноге производят поворот корпуса вправо на 45° с постановкой правой ноги с разворотом стопы наружу под углом 45° таким образом, что стопы правой и левой ноги образуют угол 90° (шаг 3), затем приставляют левую ногу с поворотом корпуса вправо еще на 45° (шаг 4). Поворот на 180° налево осуществляют зеркально, начиная с шага левой ноги.
• Поворот на 360° производят следующим образом:
Вариант 5: Выполнение двух циклов поворотов направо или налево по варианту 3 позволяет произвести поворот на 360°.
Вариант 6: Выполнение двух поворотов направо и налево по варианту 4 также позволяет произвести поворот на 360°.
Пациентов обучают поворотам по всем 6-ти вариантам.
При повороте направо на 90° и 180° с использованием веса тела при переносе его с одной ноги на другую укрепляют мышцы, осуществляющие ротацию бедра правой ноги кнаружи (шаг 1) и кнутри при повороте на 90° (шаг 2). Аналогичным образом укрепляют мышцы, ротирующие бедро левой ноги кнаружи и кнутри при повороте налево на 90°;
[08] формируют навыки ходьбы в естественных природных условиях на специально оборудованном полигоне ходьбы, в частности навыки: ходьбы по гравию по сложной траектории движения с разными углами поворота по и против часовой стрелки (Фиг. Д: серая линия); ходьбы со сменой грунта: с гравия на землю и мох и обратно, - используя траекторию движения, включающую две диагонали и средние продольную и поперечную линии, соединенные переходными линиями по периметру учебной площадки (Фиг. Д: 15-16-17-18-19-20-21-22); ходьбы по разному грунту, такому как: гравий, земля, мох, трава, камни, площадка из мостового камня; подъема и спуска по лестнице и горкам, в том числе по земляному пригорку, прямым и боковым приставным шагом; ходьбы по линии из бордюрных блоков шириной от 5 до 7 см; ходьбы с преодолением препятствий: перешагивание через линии из бордюрных блоков, корни деревьев, сросшиеся у основания два дерева, высотой препятствий от 5 до 25 см, шириной от 5 до 20 см;
[09] формируют навык решения двигательных задач сначала на взаимодействие двух ног, затем с последовательным включением одной или двух рук, используя траекторию «змейка» с тремя препятствиями (конусами) (Фиг. Г), в частности выполняют следующие спортивно-игровые упражнения: ведение мяча попеременно левой и правой ногой; в ходьбе отбивание мяча об пол сначала правой рукой, затем левой, после попеременно правой и левой рукой; в ходьбе жонглирование двумя теннисными мячами; в ходьбе на открытой ладони одной руки несут гибкую тарелку с двумя теннисными мячами, в другой - гибкий стакан, заполненный водой не более 1 см от края стакана. Упражнения выполняют способами ходьбы: прямой, затем реверсивной ходьбой (Фиг. Г: 11-12-11), после чередованием боковых шагов с шагами вперед и назад попеременно (Фиг. Г: 13-14-13).
Упражнения учебно-тренировочного комплекса маневренности на протезе выполняют с использованием ТСР: костыли или трости и без них. Для ослабленных пациентов, а также пациентов старше 65 лет обучение маневренности на протезе могут начинать с использования ходунков.
Обучение маневренности на протезе вне брусьев в основном проводят для пациентов трудоспособного возраста с использованием ТСР: костыли или трости при условии односторонней ампутации вне зависимости от уровня ампутации: от стопы до полного вычленения в тазобедренном суставе; допускается обучение при парной ампутации в случаях усечения нижних конечностей на уровне двух голеней либо на уровне голени и стопы.
Занятия по обучению базовым навыкам маневренности на протезе проводят в очно-заочной форме, 2 раза в неделю с интервалом 2-3 дня. На очных занятиях реабилитолог или инструктор обучает пациентов техникам видов и способов ходьбы, подъема и спуска по лестнице и горке, ходьбы в естественных природных условиях, а также двигательным задачам на взаимодействие рук и ног; проводит видеосъемку пациента с необходимыми методическими пояснениями при выполнении упражнений, при совершении ошибок для дальнейших самостоятельных занятий пациентов по освоению техники и базовых навыков маневренности на протезе.
Минимальный срок освоения базовых навыков маневренности на протезе голени -5-7 календарных дней (2-3 очных занятия), на протезе бедра -7-10 календарных дней (3-4 очных занятия).
Уровень маневренности является интегрированным показателем, в котором через результат выполняемых повседневных двигательных задач реализуются критерии оценки, используемые в прототипе 2.
Способ оценки маневренности позволяет оценивать уровень маневренности по 5-тибальной системе следующим образом:
1 балл - отсутствие вертикализации пациента и маневренности на нижних конечностях; перемещение на инвалидной коляске в ограниченном пространстве (помещении); зависимость от окружающих людей;
2 балла - низкая маневренность с перемещением на одной ноге и использованием ТСР: ходунков или двух костылей; выполнение двигательных задач на одной ноге;
3 балла - частичная маневренность с перемещением на двух ногах с использованием ТСР: ходунков, двух костылей, двух тростей; выполнение двигательных задач двумя ногами, в том числе на их взаимодействие;
4 балла - средняя маневренность с использованием ТСР: одного костыля или одной трости; свободная рука выполняет двигательные задачи с одновременным перемещением на двух ногах;
5 баллов - высокая маневренность со свободным перемещением на двух ногах без применения ТСР с одновременным выполнением двигательных задач обеими руками.
Уровень маневренности на одной ноге с использованием ходунков или костылей оценивают при решении следующих двигательных задач: ходьба по прямой ровной поверхности, повороты направо и налево, обход препятствий, подъем и спуск по лестнице.
Уровень маневренности на двух ногах определяют последовательно по результатам тестовых упражнений с использованием спортивного инвентаря и предметов бытового обихода сначала на взаимодействие двух ног, далее с дополнительным включением одной или двух рук. В качестве тестовых упражнений может быть использован комплекс спортивно-игровых упражнений, предложенный автором изобретения.
Уровень маневренности позволяет оценить степень адаптации пациента к решению повседневных двигательных задач и является критерием уровня освоения протеза, максимально высокое значение которых 100% соответствует 5 баллам уровня маневренности, а степень адаптации или уровень освоения протеза, соответствующие менее 5 баллов, определяют в процентном отношении к максимальному значению.
Показатель уровня маневренности может быть использован как для оценки фактического уровня маневренности пациентов, так и в динамике до, в процессе и после обучения маневренности на протезе, а также эффективности проводимых реабилитационных мероприятий.
ТЕХНИЧЕСКИЙ РЕЗУЛЬТАТ
Технический результат от использования изобретения:
• комплексное решение проблемы устранения контрактуры суставов усеченной и сохранной конечности, в частности: сгибательной в коленном и тазобедренном суставе путем растяжения сгибателей и укрепления разгибателей прямой и реверсивной ходьбой; отводящей тазобедренного сустава путем укрепления приводящих мышц бедра ходьбой боковыми и диагональными перекрестными шагами; с ротацией кнаружи в тазобедренном суставе путем укрепления мышц, ротирующих бедро кнутри, при поворотах на 90° и 180° на протезируемой ноге;
• устранение атрофии мышечных групп альтернативным способом за счет укрепления мышц нижних конечностей, ягодиц и спины путем постепенного освоения пациентами от более щадящего вида ходьбы приставным шагом до более нагрузочных видов ходьбы: на 4 и 2 шага, ходьбы перекрестным шагом, по неровной и наклонной поверхности, ходьбы по лестнице, спортивно-игровых упражнений на взаимодействие ног и рук, в комбинации с разными способами ходьбы: прямой и реверсивной ходьбы, боковыми приставными и перекрестными шагами, поворотами с разным углом поворота, по разным траекториям ходьбы;
• комплексный подход на этапе первичного протезирования к восстановлению нарушенных физических качеств, в частности: силы, быстроты, выносливости, гибкости, ловкости, и скоростно-силовых и координационных способностей пациентов за счет укрепления мышечных групп, отвечающих: за сгибание и разгибание в сохранных коленных и тазобедренных суставах путем комбинации видов ходьбы, выполняемых прямым и реверсивным способом ходьбы; за отведение и приведение в тазобедренных суставах путем ходьбы перекрестными и боковыми приставными шагами; за ротацию кнаружи и кнутри в тазобедренных суставах при поворотах на 90° и 180° с силовым воздействием веса собственного тела при его переносе с одной ноги на другую; а также за счет устранения контрактуры и увеличения объема движения в сохранных суставах и выполнения сложно-координационных движений спортивно-игровых упражнений на взаимодействие двух ног с дополнительным включением одной или двух рук;
• нормализация пространственно-временных параметров ходьбы пациентов, в частности: скорости, пройденного расстояния, темпа ходьбы, ритмичности ходьбы, шага, цикла шага, периода опоры и периода переноса, за счет комбинации видов ходьбы, выполняемых реверсивной ходьбой в сочетании с прямым способом ходьбы и укрепления мышц нижних конечностей, ягодиц и спины;
• улучшение осанки за счет осуществления циклических видов ходьбы способами ходьбы: прямой и реверсивной ходьбой;
• нормализация психоэмоционального состояния пациентов альтернативным способом за счет постепенного освоения навыков маневренности на протезе, в частности, происходит замещение страхов, сомнений: «Смогу ли я на протезе ноги сделать то, что делал раньше?», неуверенности в себе, в свои возможности, восприятия себя неполноценным, ущербным человеком на уверенность в себе, убеждение «Я могу все!», восприятие себя полноценным человеком, мотивацию на освоение протеза и исследование своих возможностей при его использовании;
• доступность способа обучения маневренности на протезе по месту нахождения пациента за счет обучения вне параллельных брусьев с использованием ТСР: ходунков, костылей и тростей; при условии односторонней ампутации от стопы до полного вычленения в тазобедренном суставе, допускается обучение пациентов при двусторонней ампутации на уровне двух голеней и голени и стопы; а также наличия учебной площадки минимум длиной 3 м и шириной 1,5 м; учебных видеоматериалов с методическими пояснениями;
• сокращение срока реабилитации пациентов на этапе первичного протезирования при очно-заочной форме обучения с минимальным сроком обучения: 5-7 календарных дней (2-3 очных занятия) при освоении протеза голени, 7-10 календарных дней (3-4 очных занятия) при освоении протеза бедра, с интервалом между занятиями 2-3 дня для самостоятельного освоения пациентами техники и навыков ходьбы по учебным видеоматериалам с участием самого пациента с необходимыми методическими пояснениями;
• показатель уровня маневренности позволяет оценить степень адаптации пациента к решению повседневных двигательных задач и является критерием уровня освоения протеза, максимальное значение которых 100% соответствует 5 баллам уровня маневренности, а степень адаптации или уровень освоения протеза, соответствующие менее 5 баллов, определяют в процентном отношении к максимальному значению;
• показатель уровня маневренности может быть использован для оценки, как фактического уровня маневренности пациентов, так и в динамике: до, в процессе и после обучения маневренности на протезе, а также эффективности реабилитационных мероприятий.
ГРАФИЧЕСКИЕ ИЗОБРАЖЕНИЯ
На Фиг. изображены конфигурации траекторий движений, используемых в учебно-тренировочном процессе обучения маневренности на протезе.
НОВИЗНА ИЗОБРЕТЕНИЯ
Новизной изобретения является:
• комплекс упражнений по обучению базовым навыкам маневренности на протезе и последовательность их выполнения;
• траектории движения разной конфигурации, используемые в учебно-тренировочном процессе;
• применение методики реверсивной ходьбы в учебном процессе освоения протеза нижней конечности после ампутации и первичного протезирования;
• очно-заочная форма обучения маневренности на протезе с использованием учебных видеоматериалов с участием пациента с методическими пояснениями;
• комплексный подход к решению проблемы устранения контрактуры сохранных суставов нижних конечностей на этапе освоения протеза;
• альтернативный способ технического решения устранения атрофии мышц с одновременным восстановлением нарушенных физических качеств и способностей на этапе освоения протеза после первичного протезирования;
• альтернативный способ технического решения коррекции психоэмоционального состояния пациентов;
• уровень маневренности в качестве критерия освоения протеза нижней конечности;
• уровень маневренности в качестве показателя степени адаптации пациентов к решению повседневных двигательных задач
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Способом обучения маневренности на протезе было обучено 62 человека: мужчины и женщины в возрасте от 20 до 86 лет, в том числе с односторонней ампутацией нижних конечностей на уровне голени и бедра - 58 чел., на уровне стопы - 1 чел, с полным вычленением в тазобедренном суставе - 1 чел., с двухсторонней ампутацией на уровне двух голеней - 2 чел.
Причины усечения нижних конечностей пациентов: сосудистые заболевания, в том числе как осложнение после COVID-19, сахарный диабет, онкология, травмы после ДТП, боевых ранений, бытовые. Пациенты с усечением конечности в результате боевых ранений имели сопутствующие повреждения сохранной конечности, в частности: осколочные ранения ног и рук, переломы, повреждения мышц и нервов с потерей чувствительности. Обучение двух пациентов проводилось с использованием ортеза для фиксации стопы сохранной ноги.
Обучение пациентов проводилось: в зале с учебной площадкой длиной 5 м и шириной 3 м с углом поворота 59° при ходьбе по траектории, состоящей из двух диагональных и двух параллельных сторон учебной площадки; на учебном полигоне общей площадью 800 м2 с высотой препятствий 5 и 25 см и их шириной - 5,7 и 20 см, шириной бордюрных блоков 7 см, с учебной площадкой длиной 6 м и шириной 4 м протезного предприятия; в домашних условиях; вне жилых помещений: в парках, на спортивных площадках, по пешеходным дорожкам на внутридворовых территориях, по тротуару на улице; с использованием ТСР: ходунки, костыли и трости.
В примерах промышленной применимости рассмотрены следующие частные случаи технического результата изобретения:
• устранение контрактуры на примере - сгибательной контрактуры коленного сустава; объем движения в суставе определялся по углу разгибания с помощью угломера в положении «лежа на боку»;
• устранение мышечной атрофии, а также восстановление нарушенных физических качеств и способностей на примере: скорости, определяемой с помощью механического секундомера СОП пр-2а-2-010, пройденного расстояния, измеряемого по разметке спортивной дистанции;
• пространственно-временные параметры ходьбы на примере: скорости и ритмичности ходьбы, определяемых с помощью 3-х датчиков «Нэйросенс» Комплекса «СТЭДИС» со встроенными в них гироскопами и акселерометрами, которые располагают на уровне щиколоток сбоку на ногах и на уровне крестца, позволяющие оценивать параметры биомеханики ходьбы; показатели нормы скорости и ритмичности ходьбы предоставлены разработчиком Комплекса «СТЭДИС», определены ГОСТом 53871-2021 [9].
Норму ритмичности ходьбы здорового человека определяют по коэффициенту ритмичности в диапазоне 0,98-1,00. При ходьбе на протезе голени коэффициент ритмичности может находиться в пределах 0,87-0,98, а на протезе бедра - 0,57-0,89 [9].
Оценку осанки на примере кифотической осанки (сутулости) производят по плечевому индексу, определяемому по формуле 1 [10]:
ПИ = (ШП / ПД) х 100 %, (1)
где ПИ - плечевой индекс, ШП - ширина плеч (см), ПД - плечевая дуга (см).
С помощью сантиметровой ленты ширину плеч измеряют в сантиметрах по прямой линии между крайними плечевыми точками спереди, плечевую дугу измеряют между теми же точками сзади по дуге.
Оценку кифотической осанки по плечевому индексу производят следующим образом:
• до 89,9 % и ниже оценивается как наличие сутулости;
• от 90 до 100 % - оценивается как нормальная осанка.
Оценка уровня маневренности проводилась по тестовым упражнениям до и после обучения маневренности на протезе по способу, предложенному автором изобретения.
Степень адаптации пациента к решению повседневных двигательных задач и уровень освоения протеза оценивают как максимально высокие - 100%, что соответствует 5 баллам уровня маневренности, при уровне маневренности менее 5 баллов определяют в процентном отношении к максимальному значению.
По результатам обучения базовым навыкам маневренности минимально за 3 очных занятия (6-7 календарных дней обучения по очно-заочной форме обучения) после первичного протезирования пациентами на протезе голени были достигнуты максимальные значения скорости ходьбы - 7,46 км/ч (при норме - 2-4 км/ч), пройденного расстояния - 8 км (при критерии освоения самостоятельной ходьбы на протезе 1-2 км без выраженных признаков усталости); на протезе бедра: скорость ходьбы - 4,23 км/ч, пройденное расстояние - 4 км; максимальное значение коэффициента ритмичности ходьбы и на протезе голени и на протезе бедра - 1,00 (т.е. максимальное значение нормы ходьбы здорового человека).
В подготовке к международным соревнованиям по скандинавской ходьбе, которые прошли в г. Москве в сентябре 2019 года, приняла участие команда из 6 чел.: 5 мужчин с ампутацией бедра и женщина с ампутацией голени, 4 чел. из них при ходьбе пользовались тростью. За 3-4 очных занятия была освоена техника скандинавской ходьбы и базовые навыки маневренности на протезе, результат сохраняется по настоящее время. В результате за период подготовки увеличились: пройденное расстояние без отдыха с 300-500 м до 2-5 км, скорость ходьбы за тот же период возросла в среднем с 3 до 4 км/ч на дистанции 2 км, и до 6 км/ч у мужчин и 5 км/ч у женщины в эстафете 4 чел. по 400 м. Команда заняла 3-е призовое место в эстафете 4 чел. по 400 м среди команд, в которых участниками были здоровые люди, осуществляющие ходьбу на своих ногах. После завершения спортивной подготовки уровень маневренности увеличился с 4 до 5 баллов, соответственно уровень освоения протеза и степень адаптации к решению повседневных двигательных задач возросла с 80 до 100%.
После обучения базовым навыкам маневренности на протезе на этапе первичного протезирования пациенты продемонстрировали свои способности в решении следующих двигательных задач: вождение автомобиля с механическим управлением, чеканка мяча попеременно сохранной и протезированной ногами, ведение мяча и бросок в сетку баскетбольного мяча, игра в настольный теннис, копание грядки, замена лампочки в люстре на стремянке и другие факты, подтверждающие адаптацию пациентов к решению повседневных двигательных задач в разных сферах жизни (в отзывах, фото- и видеоматериалах пациентов).
ПРИМЕР 1. Пациент, 40 лет, ампутация на уровне бедра правой ноги вследствие осколочного ранения от разрыва танкового снаряда; сопутствующее осколочное ранение локтевого сустава правой руки, осколок не извлечен из-за риска перелома, в результате - он не мог держать в правой руке небольшие предметы: кружку, зубную щетку, не мог взять в руки костыли; изначально перемещался на инвалидной коляске, обучение проходил на протезном предприятии, программа обучения базовым навыкам маневренности на протезе освоена за 3 очных занятия (7 календарных дней) с использованием ТСР: костыли и трости; после обучения осуществляет самостоятельную ходьбу без ТСР.
Уровень маневренности увеличился за время обучения с 1 до 5 баллов, соответственно уровень освоения протеза и степень адаптации к решению повседневных двигательных задач возросли с 20 до 100%.
Улучшилась осанка, уменьшилась сутулость: плечевой индекс увеличился с 80 до 87%.
Максимальный уровень ритмичности ходьбы составил 1,00.
Из отзыва пациента: «До начала занятий я и не предполагал, что так будет тяжело начинать, думал, что научат только ходить, но был удивлен себе, что так многому смог научиться, что теперь столько всего умею делать на своих ногах. Были сомнения, как я буду учиться ходить. Переживал, что не встану на протез, потому что не мог взять костыли в руки. После разработки руки смог взять в руки костыли и отказаться от инвалидной коляски.
В начале занятий по освоению протеза ноги боялся, что упаду, что не смогу, не получится выполнить предлагаемые мне задания, но уже на 3-4-й раз повторения у меня стало получаться, стал уверенней ходить, даже думать стал уверенней, появилась уверенность в себе, в своих возможностях, стал на сто процентов доверять протезированной ноге. А на последнем занятии я изначально пришел на двух костылях, но был момент, что не заметил, как пошел без костылей на протезе бедра.
Из всех заданий более сложным и непривычным для меня была ходьба по траве, в природных условиях. Новыми для себя возможностями было вести мяч, обходя препятствия, вести мяч «задом наперед», и у меня это получилось. Понравились все задания с мячами, жонглирование с теннисными мячами в ходьбе. Я и не думал, что такие задания могут быть даны после ампутации ноги, но у меня все получилось, и я теперь понимаю, что такие задания важно давать людям, которые оказались в ситуации, как у меня. Методика в целом не только помогает за короткое время научиться ходить на протезе, но и дает положительные эмоции, помогает в психологическом плане поверить в себя».
ПРИМЕР 2. Пациент, 32 года, ампутация на уровне голени правой ноги в результате минно-взрывного поражения; на сохранной ноге был разбит голеностопный сустав, разрыв стопы от большого пальца до пятки, перелом пяточной кости со смещением, 2 неизвлеченных осколка в стопе из-за риска перелома, с наложением гипса в течение 4-х месяцев, 3 из которых был на постельном режиме, месяц перемещался в инвалидной коляске. Обучение проходил на протезном предприятии, программа обучения маневренности на протезе освоена за 3 очных занятия (6 календарных дней) с использованием ТСР: костыли и трости; после обучения осуществляет самостоятельную ходьбу без ТСР.
После завершения обучения продемонстрировал способность подняться по вертикальной лестнице на спортивной площадке, перелезть на другую сторону и спуститься с обратной стороны лестницы.
Уровень маневренности увеличился с 1 до 5 баллов, уровень освоения протеза и степень адаптации к решению повседневных двигательных задач возросли с 20 до 100%.
Нормализовалась осанка: плечевой индекс увеличился с 85 до 93%.
Сгибательная контрактура в коленном суставе уменьшилась: угол разгибания увеличился со 165° до 176°, т.е. с умеренного ограничения движения в суставе до нормы (при норме разгибания от 176° до 180°).
Из отзыва пациента: «Думал, что встану на протез не раньше, чем через год и буду ходить на костылях. У меня были атрофированы мышцы ног, т.к. гипс на травмированной ноге у меня был наложен на 4 месяца. Тогда было много переживаний: была неизвестность, как, что будет дальше, резко все обрывается после такого ранения, теряешься: как вообще дальше жить без ноги? Как работать буду? Как ходить вообще буду?
Однако уже после 3-го занятия, т.е. через неделю после начала обучения, я смог самостоятельно ходить без дополнительных средств опоры. Был удивлен такому результату, ведь гипс мне сняли всего лишь за две недели до начала занятий.
Но уже после 3-го занятия я понял, что нет ничего невозможного, все в твоих руках, все в твоих силах. Будет стремление, и все у тебя будет. Я уверен в том, что вернусь на свою любимую работу и буду нормально жить полноценной жизнью, как и раньше. У меня появилась уверенность в себе, даже дважды попытался побежать. За 3 занятия обучения я снова стал ощущать себя человеком: раньше я считал себя неполноценным человеком, а теперь стал полноценным, могу жить так же, как жил раньше.
Сложным для меня было спускаться по лестнице из-за травмы стопы. На спортивно-игровом занятии было опасение, что не смогу пройти «змейкой», неся стакан с водой, или пройти, ведя мячи. Я не думал, что смогу идти «змейкой» и жонглировать двумя теннисными мячиками, раньше я этого не умел вообще делать, но я выполнил все задания. Когда, выполняя задания, я шел вперед «змейкой», то выстраивал траекторию движения, и мне потом было легче выполнить эти же задания, проходя «змейкой» задом наперед. Понравилось идти «змейкой» и чеканить мяч одной и двумя руками об пол. На полигоне, на первый взгляд, казалось, очень сложно пройти между сросшихся у основания деревьев. Но когда начинаешь это делать - включаешь мозг, думаешь, как тебе поставить ногу, чтобы перешагнуть и там наступить, и вторую ногу перенести. Мне это тоже понравилось.
В целом методика обучения базовым навыкам маневренности на протезе нужна и действительно она очень помогает научиться эффективно управлять протезом. Было удивительным, что на тестировании биомеханики ходьбы у меня был максимальный результат коэффициента ритмичности ходьбы, равный 1,00, что соответствует максимальному значению нормы ходьбы здорового человека».
ПРИМЕР 3. Пациентка, 80 лет, ампутация на уровне бедра правой ноги, причина ампутации: атеросклероз артерий нижних конечностей; одинокая. Обучение проходила в домашних условиях, на спортивной площадке во дворе дома, по пешеходным дорожкам возле дома; программа обучения маневренности на протезе была освоена за 5 очных занятий (2,5 недели) с использованием ТСР: ходунки, костыли и трости; пациентка поставлена на трость. Уровень маневренности увеличился с 1 до 4 баллов, уровень освоения протеза и степень адаптации к решению повседневных двигательных задач возросли с 20 до 80%.
После завершения обучения базовым навыкам маневренности пациентка адаптирована к самостоятельному решению необходимых повседневных двигательных задач таких, как: уход за собой, уборка, стирка, приготовление еды, вынос мусора с подъемом и спуском на лестничный пролет, покупка продуктов в магазине, прогулки на улице, встречи и общение с друзьями и знакомыми.
ИСТОЧНИКИ ИНФОРМАЦИИ
1) RU2558463 C1, опуб. 10.08.2015г. (Прототип 2).
2) Рындина Р.Б., Добрынина Л.А. Физическая реабилитация лиц после ампутации и протезирования нижней конечности в Школе ходьбы протезного предприятия // Ученые записки университета им. П.Ф. Лесгафта, Часть 2. - 2022. - №10 (212). - С.387-393.
3) Клеменов А.В. Обратная ходьба как новая методика физической реабилитации. // Физиотерапия, бальнеология и реабилитация. - 2018, т. 17(1). - С. 4-8.
4) Мифтахов А.Ф., Толибова М.Ф. Значение вестибулярного аппарата и способы его тренировки // NOVAUM.RU. - 2019. - № 20. - С.46-48.
5) Jack McNamara, Walking backwards has a surprising number of health benefits. // The Conversation. - [Электронный ресурс]: URL: https://theconversation.com/walking-backwards-has-a-surprising-number-of-health-benefits-195246, опубл. 30.11.2022г.
6) Школа ходьбы на протезе. Видео занятий. - [Электронный ресурс]: URL: https://www.ottobock.com/ru-ru/services/school-of-walking, опубл. 2018-2021гг. (Прототип 1).
7) Физическая и реабилитационная медицина. Национальное руководство. Краткое издание / под ред. Г. Н. Пономаренко. - М.: ГОЭТАР-Медиа, 2017. - 512 с.
8) Вехби Ахмед, Комплексная методика обучения ходьбе на протезе бедра при первичном протезировании инвалидов средствами физической культуры и искусственной коррекции движений /диссерт: канд.пед.наук. - М., 1999. - 211с.
9) ГОСТ Р 53871-2021. Методы оценки реабилитационной эффективности протезирования нижних конечностей: национальный стандарт Российской Федерации. Москва: Стандартинформ. - 2021.
10) Методы оценки и коррекция нарушений осанки у студентов: методические указания для студентов и преподавателей / сост.: О. Н. Кривощёкова, Т. Ф. Зелова. - Омск, 2011. - 34 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФИЗИЧЕСКОЙ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ С АМПУТАЦИЯМИ НИЖНИХ КОНЕЧНОСТЕЙ | 2023 |
|
RU2834772C1 |
| Способ реабилитации пациентов после эндопротезирования тазобедренного сустава | 2019 |
|
RU2725245C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВЕРТИКАЛЬНОЙ ПОЗЫ И ХОДЬБЫ У ПАЦИЕНТОВ С ПАРА- ИЛИ ТЕТРАПАРЕЗОМ | 2014 |
|
RU2572550C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ У БОЛЬНЫХ С ТЕТРАПАРЕЗОМ | 2007 |
|
RU2347551C1 |
| Способ гидрокинезиотерапии пациентов после односторонней ампутации нижней конечности | 2024 |
|
RU2826980C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ВЕРТИКАЛЬНОЙ ПОЗЫ У ИНВАЛИДОВ С ПОРАЖЕНИЕМ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ | 2006 |
|
RU2305534C1 |
| СПОСОБ РЕАБИЛИТАЦИИ ПАЦИЕНТА С НАРУШЕНИЕМ ПОСТУРАЛЬНОГО БАЛАНСА | 2016 |
|
RU2626912C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ И КООРДИНАЦИИ У ДЕТЕЙ В РАННЕЙ РЕАБИЛИТАЦИИ ПОЗВОНОЧНО-СПИННОМОЗГОВОЙ ТРАВМЫ С ПРИМЕНЕНИЕМ ИГРОВОГО МЕТОДА | 2014 |
|
RU2567796C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ВЕРТИКАЛЬНОЙ ОСИ ТЕЛА ЧЕЛОВЕКА | 2005 |
|
RU2291680C1 |
| СПОСОБ РЕАБИЛИТАЦИИ БОЛЬНЫХ ДЕТСКИМ ЦЕРЕБРАЛЬНЫМ ПАРАЛИЧОМ | 2011 |
|
RU2471466C2 |
Изобретение относится к области медицины, а именно - к протезированию, травматологии и ортезированию, может быть использовано в реабилитации пациентов после ампутации и протезирования нижних конечностей, в адаптивном спорте. Учебно-тренировочный комплекс и способ обучения базовым навыкам маневренности на протезе, доступные по месту нахождения пациентов, включают комплекс упражнений и варианты их выполнения. Техническое оснащение: учебные площадки длиной 3-8 м и шириной 1,5-4 м с траекториями движения разной конфигурации; полигон ходьбы общей площадью 700-1000 м2. Оборудование: лестницы и горки; инвентарь. Технические средства реабилитации: ходунки, костыли и трости; учебные видеоматериалы. Группа изобретений обеспечивает улучшение адаптации пациентов после ампутации и протезирования нижних конечностей к решению повседневных двигательных задач, устранение контрактуры сохранных суставов и мышечной атрофии, восстановления нарушенных физических качеств и способностей, улучшение осанки, нормализацию пространственно-временных параметров ходьбы и психоэмоционального состояния пациентов, сокращение срока реабилитации пациентов. 2 н. и 4 з.п. ф-лы, 1 ил., 3 пр.
1. Способ обучения маневренности на протезе, включающий перенос веса тела с одной ноги на другую, ходьбу на 4 и 2 шага способом прямой ходьбы, подъем и спуск по лестнице и горке с наклонной плоскостью, отличающийся тем, что выполняют действия перемещения на нижних конечностях, а также двигательные задачи по взаимодействию ног и рук при прямой постановке корпуса, исключающей наклоны во фронтальной и сагиттальной плоскостях, ротацию корпуса со стороны усеченной конечности, наклон головы вперед, в следующей последовательности:
- переносят вес тела с ноги на ногу вправо и влево, по 2 раза на каждую ногу, продолжительностью по 3-5 сек, затем равномерно распределяют вес тела на обе ноги, далее одну ногу ставят вперед и переносят вес тела с одной ноги на другую вперед и назад, далее то же после смены позиции ног;
- проводят ходьбу следующих видов: ходьба приставным шагом сначала с сохранной ноги, после с протезированной ноги; ходьба на 4 шага: поочередно шаг костылем, затем - противоположной ногой, далее - вторым костылем, после - второй ногой; на 2 шага: поочередно синхронно шаг парой костыль и противоположная нога, затем - второй парой; выполняют способами ходьбы в последовательности: прямая и реверсивная ходьба, повороты направо и налево;
- проводят ходьбу по траектории движения, состоящей из двух диагоналей, соединенных между собой двумя параллельными сторонами учебной площадки по Фиг. А: 1-2-3-4-1, в последовательности приставным шагом с сохранной ноги и с протезированной ноги, ходьбу на 4 и 2 шага, при этом каждый вид ходьбы выполняют путем чередования способов ходьбы: прямой ходьбы с двумя поворотами направо и двумя поворотами налево с углом поворота в диапазоне 27-63°; при этом пациентов постепенно переводят с использования 2-х костылей на 2 трости, далее на 1 трость и ходьбу без использования ТСР;
- выполняют комбинации видов ходьбы по траектории движения в виде прямой линии учебной площадки как на Фиг. Б: 5-6, приставным шагом с сохранной ноги, то же с протезированной ноги, ходьбы на 4 и 2 шага, - путем чередования прямой и реверсивной ходьбы при условии: прямой ходьбой осуществляют проход одним видом ходьбы, реверсивной – другим видом ходьбы, используя все четыре вида ходьбы двумя способами;
- выполняют перекрестные шаги вперед и назад правой и левой ногой, путем чередования диагональных шагов вперед и назад и боковых перекрестных шагов вправо и влево по траектории, состоящей из двух диагональных линий, соединенных одной стороной учебной площадки как на Фиг. В: 7-8-7-9-10-9-7;
- выполняют ходьбу по лестнице: подъем с сохранной ноги и спуск с протезированной ноги прямым шагом, затем по ступенькам под углом 45° приставным шагом; подъем и спуск на каждую ступеньку попеременным шагом при условии ходьбы на протезе голени или протезе бедра с функцией подкосоустойчивости с опорой одной рукой на поручень, другой - на ТСР: костыль, трость или без них; по наклонной поверхности горки: подъем боковыми приставными шагами с сохранной ноги и спуск – с протезированной ноги с опорой руками на поручень или без опоры;
- выполняют повороты на 90°, 180°, 360° направо и налево, а также повороты в комбинации с прямой и реверсивной ходьбой, с шагами вперед и назад, боковыми приставными шагами вправо и влево;
- выполняют ходьбу по гравию траекторией движения с разными углами поворота по и против часовой стрелки как на Фиг. Д серая линия; ходьбу со сменой грунта: с гравия на землю и мох и обратно, используя траекторию движения, включающую две диагонали и средние продольную и поперечную линии, соединенные переходными линиями по периметру учебной площадки как на Фиг. Д: 15-16-17-18-19-20-21-22; ходьбу по разному грунту, такому как:
гравий, земля, мох, трава, камни, площадка из мостового камня; подъем и спуск по лестнице и горкам, в том числе по земляному пригорку, прямым и боковым приставным шагом; ходьбу по линии из бордюрных блоков шириной от 5 до 7 см; ходьбу с преодолением препятствий: перешагивание через линии из бордюрных блоков, корни деревьев, сросшиеся у основания два дерева, высотой препятствий от 5 до 25 см, шириной от 5 до 20 см;
- выполняют двигательные задачи сначала на взаимодействие двух ног, затем с последовательным включением одной или двух рук, используя траекторию «змейка» с тремя препятствиями – конусами как на Фиг. Г, при этом выполняют следующие спортивно-игровые упражнения: ведение мяча попеременно левой и правой ногой; в ходьбе отбивают мяч об пол сначала правой рукой, затем левой, после попеременно правой и левой рукой; в ходьбе жонглируют двумя теннисными мячами; в ходьбе на открытой ладони одной руки несут тарелку с двумя теннисными мячами, в другой – стакан, заполненный водой не более 1 см от края стакана, выполняют упражнения способами ходьбы: прямой, затем реверсивной, после чередованием боковых шагов с шагами вперед и назад попеременно.
2. Способ обучения маневренности на протезе по п. 1, отличающийся последовательностью выполнения вариантов поворотов на 90°, 180°, 360°:
а) выполняют поворот на 90° в 3 шага:
- по варианту 1 при повороте направо начинают с шага правой ноги вперед с разворотом стопы наружу под углом 45° - шаг 1, далее осуществляют поворот корпуса вправо на правой ноге с постановкой левой ноги на 90° - шаг 2, затем приставляют правую ногу - шаг 3; поворот налево производят зеркально, начиная с шага левой ноги;
- по варианту 2 поворот направо начинают с прямого шага назад левой ноги - шаг 1, далее на левой ноге производят поворот корпуса вправо на 45° с постановкой правой ноги с разворотом стопы наружу под углом 45° таким образом, что стопы правой и левой ноги образуют угол 90° - шаг 2, затем приставляют левую ногу с поворотом корпуса вправо еще на 45° - шаг 3; поворот налево производят зеркально, начиная с прямого шага назад правой ноги;
б) выполняют поворот на 180° следующим образом:
- по варианту 3 поворотами направо на 90° вариантами 1 и 2 производят поворот на 180°; аналогичным образом осуществляют поворот налево;
- по варианту 4 поворот на 180° выполняют на 4 шага: поворот направо на 180° начинают с шага правой ноги вперед с разворотом стопы наружу под углом 45° - шаг 1, далее производят поворот корпуса вправо на правой ноге с постановкой левой ноги на 90° - шаг 2, затем на левой ноге производят поворот корпуса вправо на 45° с постановкой правой ноги с разворотом стопы наружу под углом 45° таким образом, что стопы правой и левой ноги образуют угол 90° - шаг 3, после приставляют левую ногу с поворотом корпуса вправо еще на 45° - шаг 4; поворот на 180° налево осуществляют зеркально, начиная с шага левой ноги;
в) выполняют поворот на 360° следующим образом:
- по варианту 5 выполнением двух циклов поворотов направо или налево по варианту 3 производят поворот на 360°;
- по варианту 6 выполнением двух поворотов направо или налево по варианту 4 производят поворот на 360°.
3. Способ обучения маневренности на протезе по п. 1, отличающийся тем, что минимальный срок обучения при освоении протеза голени составляет 5-7 календарных дней, включающих 2-3 очных занятия, при освоении протеза бедра 7-10 календарных дней, включающих 3-4 очных занятия, с интервалом между занятиями 2-3 дня для самостоятельного освоения пациентами техники и навыков ходьбы по учебным видеоматериалам с участием самого пациента с необходимыми методическими пояснениями.
4. Способ обучения маневренности на протезе по п. 1, отличающийся тем, что для ослабленных пациентов и пациентов старше 65 лет обучение маневренности на протезе начинают с использования ходунков.
5. Способ обучения маневренности на протезе по п. 1, отличающийся тем, что используются футбольный и гимнастический мячи.
6. Учебно-тренировочный комплекс маневренности на протезе для выполнения способа по пункту 1, включающий, техническое оснащение: учебные площадки в помещении и на улице длиной 3-8 м и шириной 1,5-4 м с траекториями движения разной конфигурации, используемыми в качестве основы учебно-тренировочных комплексов упражнений; полигон ходьбы общей площадью 700-1000 м2; различные типы грунта: гравий, земля, мох, трава, камни, площадка из мостового камня; оборудование: лестницы и горки с наклонной плоскостью; технические средства реабилитации (ТСР): ходунки, костыли и трости; инвентарь: футбольный, гимнастический и теннисные мячи, конусы, тарелка и стакан; препятствия высотой от 5 до 25 см и шириной от 5 до 20 см: линии из бордюрных блоков шириной от 5 до 7 см, корни деревьев, сросшиеся у основания два дерева; учебные видеоматериалы для самостоятельных занятий по освоению техники и навыков маневренности на протезе.
| СПОСОБ КОМПЛЕКСНОЙ ОЦЕНКИ РЕЗУЛЬТАТОВ РЕАБИЛИТАЦИОННЫХ МЕРОПРИЯТИЙ У ПАЦИЕНТОВ С АМПУТАЦИОННЫМИ КУЛЬТЯМИ БЕДРА ПОСЛЕ ПРОТЕЗИРОВАНИЯ | 2014 |
|
RU2558463C1 |
| СПОСОБ ПОДБОРА ПАРАМЕТРОВ ПРОТЕЗА НИЖНЕЙ КОНЕЧНОСТИ | 1994 |
|
RU2063195C1 |
| СПОСОБ РЕАБИЛИТАЦИИ БОЛЬНЫХ ДО И ПОСЛЕ АМПУТАЦИИ НИЖНЕЙ КОНЕЧНОСТИ И ОРТОПЕДИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2032390C1 |
| БОЛОТОВ Д | |||
| Д | |||
| ОСОБЕННОСТИ ФОРМИРОВАНИЯ ПРОГРАММЫ ФИЗИЧЕСКОЙ РЕАБИЛИТАЦИИ ПРИ ПЕРВИЧНОМ ПРОТЕЗИРОВАНИИ У ПАЦИЕНТОВ С ТРАВМАТИЧЕСКИМИ ОТЧЛЕНЕНИЯМИ НИЖНЕЙ КОНЕЧНОСТИ //Вестник восстановительной медицины | |||
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |
| Т | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| N | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| С | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |

